实对称矩阵的对角化
实对称矩阵的相似对角化

一. 实对称矩阵的特征值和特征向量的性质 设矩阵A=(aij), 用aij表示aij的共轭复数, 记 A=(aij ) 称A为A的共轭矩阵. 显然, A为实矩阵时,A=A. 共轭矩阵具有下列性质:
(1) A + B = A + B ; (2) A = A , 其中是常数; (3) AB = AB ;
ξ Aξ1 = ξ ξ
T 2
T 1 2 1
而且
T T T T ξT A ξ = ξ A ξ = ( A ξ ) ξ = ξ 2 1 2 1 2 1 2 2 ξ1
于是
(1 2 )ξ ξ = 0
T 2 1
由于12, 所以2T1=0, 即1, 2正交.
二. 实对称矩阵正交相似于对角矩阵 定理6.9 设A是实对称矩阵, 则必存在正交矩阵Q, 使 得Q-1AQ=QTAQ为对角矩阵. 证 n=1时显然成立, 设对n-1阶矩阵定理结论成立. 取n阶实对称矩阵A的任一特征值1, 和属于1的特征向量1,
=(+1)(2-10-11)=(+1)2(2-11) 得特征值λ1=λ2=-1, λ3=11.
对λ1=λ2=-1, 由于
2 2 4 1 1 2 -E-A 2 2 4 0 0 0 4 4 8 0 0 0
例6 设
1 2 4 A 2 1 4 4 4 7
求一个正交矩阵Q, 使Q-1AQ为对角矩阵. 解 先求A的所有特征值 det(E-A)
1 2 4 1 1 4 3 0 8 2 1 4 2 1 4 2 1 4 4 4 7 4 0 7 4 0 7
1 6
5.3实对称矩阵的对角化
令x3 = 2, 得属于5的特征向量为 3 = (1, −2,2)T .
12
显然1 = (2,2,1)T , 2 = ( −2,1,2)T , 3 = (1, −2,2)T 正交.
(2) 求单位向量组. 1 = 2 = 3 = 3, 所以得单位正交向量组 T T T 2 2 1 2 1 2 1 2 2 1 = , , , 2 = , − , − , 3 = , − , . 3 3 3 3 3 3 3 3 3 (3) 求正交矩阵Q. 1 则 2 2 令 3 3 3 −1 0 0 2 1 2 −1 Q = ( 1 , 2 , 3 ) = − − , Q AQ = 0 2 0 = . 3 3 3 0 0 5 1 2 2 3 −3 3
T T T T 1 A = 11 , 1 A 2 = 11 2
T T 21 2 = 11 2 ,
T (2 − 1 )1 2 = 0
T 1 2 = 0
3
定理 若实对称矩阵A的特征值 的重数为k,则A 恰有k个对应于 的线性无关的特征向量. 定理 n阶实对称矩阵A一定有n个正交的特征向量. 设矩阵A的互不相同的特征值分别为 1 ( k1重) : 11 , 12 , , 1k1 , 正 11 , 12 , , 1k1 , 交 , , , , 2 k2 2 ( k2重) : 21 , 22 , , 2 k2 , 化 21 22 后 , , 得 m 1 , m 2 , , mkm , m ( km 重) : m 1 , m 2 , , mkm , 11 ,12 , ,1k1 , 1 单 其中,k1 + k2 + + km = n. 位 , , , , 21 22 2 k2 2 化 T ij ks = 0, i k . 后 , 得 m 1 ,m 2 , , mkm , m
实对称矩阵的对角化线性代数课件典型实例

虽然目前已经存在多种实对称矩阵对角化的方法,但这些方法可能不适用于某些特殊情况或具有较大的计算复杂度。 因此,需要不断探索新的实对称矩阵对角化方法,以提高计算效率和精度。
扩展实对称矩阵对角化的应用领域
目前实对称矩阵对角化主要应用于自然科学和工程领域。未来可以尝试将其应用到社会科学和人文学科 等领域,以解决一些实际问题或提供新的研究视角。
总结词
利用实对称矩阵的对角化,可以求解线性方 程组。
详细描述
对于给定的线性方程组 $Ax = b$,其中 $A$ 是实对称矩阵,我们可以将其对角化。通过 对角化后的矩阵进行求解,可以得到线性方 程组的解。
实例三:矩阵分解和矩阵求逆的实例
总结词
实对称矩阵的对角化可以用于矩阵分解 和矩阵求逆。
VS
详细描述
04
典型实例分析
实例一:二次型的最小值问题
总结词
通过实对称矩阵的对角化,可以找到二次型的最小值。
详细描述
对于给定的二次型 $f(x) = x^T Ax$,其中 $A$ 是实对称矩阵,我们可以将其对角化。通过实对称矩阵对角化, 可以将二次型转换为对角线形式,从而更容易找到最小值。
实例二:线性方程组的求解问题
性质
实对称矩阵具有一些重要的性质,如特征值和特征向量都是实数,且存在正交 矩阵P,使得$P^{-1}AP$是对角矩阵。
对角化的概念和重要性
对角化
对角化是将一个矩阵转化为对角矩阵的过程。如果存在一个可 逆矩阵P,使得$P^{-1}AP$是对角矩阵,则称矩阵A可对角化。
重要性
对角化在数学和工程领域中具有广泛的应用,如求解线性方 程组、计算行列式、判断矩阵是否可逆等。此外,对角化还 可以用于解决一些优化问题,如线性回归和主成分分析等。
第16课 实对称矩阵的对角化
1 1 p3 = , 单位化得 η 3 2 1 1 5 2 = − 5 0
1 2 1 = = 3 2 1
2 3 1 3 2 3
0−λ 0 − 1 例:A = 1 0 , | A − λE |= 1
性质1 性质1的意义
−1 = λ2 + 1 ∴ λ = ±i. 0−λ
为实数, 因为对称矩阵 A 的特征值 λi 为实数,所以齐次线性方程组 是实系数方程组。 ( A − λi E ) x = 0 是实系数方程组。 又因为 A − λi E = 0,可知该齐次线性方程组一定有实的 基础解系,从而对应的特征向量可以取实向量。 基础解系,从而对应的特征向量可以取实向量。
λ1 = 0, λ2 = 1, λ3 = 3,
1 1 1 η1 = 1 ,η2 = 0 ,η3 = −2 , 相应的特征向量是 1 −1 1 求矩阵 A.
维向量, 阶方阵。 解:因为特征向量是3维向量,所以矩阵 A 是3 阶方阵。 因为特征向量是 维向量 个不同的特征值, 可以对角化。 因为 A 有 3 个不同的特征值,所以 A 可以对角化。 即存在可逆矩阵 P , 使得 P −1 AP = Λ
η1 ,η2 ,L ,ηn
4. 以η1 ,η 2 ,L ,η n 为列向量构成正交矩阵 T = (η1 ,η 2 ,L ,η n ) 有 T −1 AT = Λ
λ1 O λ1 即 T −1 ⋅ AT = Λ = O λr O λr
−2 2 0
2 x1 = 2 x3 即 p1 = −2 . 得基础解系 x 2 = −2 x 3 1 当 λ2 = 1 时,由 ( A − E ) x = 0,
第三节 实对称矩阵的对角化

∴ ( λ − µ ) (α , β ) = 0 , 而 λ ≠ µ , (α , β ) = 0 . ∴
2
定理5.11 阶实对称矩阵A 重特征值, 定理5.11 设 λ 为n阶实对称矩阵A的k重特征值, 等于的代数重数k. 则 λ 的几何重数 n − r (λE − A) 等于的代数重数k. 换言之, 阶实对称矩阵A 因此 r (λE − A) = n − k .换言之,n阶实对称矩阵A的k重 恰有k个线性无关的特征向量. 特征值 λ 恰有k个线性无关的特征向量. 定理5.12 阶实对称矩阵,则必存在n 定理5.12 设A为n阶实对称矩阵,则必存在n阶正交 矩阵Q 矩阵Q,使 λ1
2
λ −3
2 1 2 0 0 0 , 0 0 0
4 2 4 对 λ2 = 7 , E − A = 2 1 2 → 7 4 2 4
T 特征向量 α 2 = ( −1 , 2 , 0)T , α 3 = ( −1 , 0 , 1) ,
− 4 − 4 − 1 − 1 1 1 ′ ′ α3 = 0 − 2 = − 2 , α 3′ = − 2 , 5 1 5 0 5 5
11
2 − 1 − 4 ′ α 1 = 1 , α 2 = 2 , α 3′ = − 2 , 5 2 0 −1 2 再单位化, 再单位化,拼起来得 5 3 2 1 P = 3 5 2 0 3 − 2 −1 使 P AP = 7 . 7
为任意常数; 属于特征值3的特征向量为 属于特征值 的特征向量为 α 3 = k (1,0,1) , k 为任意常数;
实对称矩阵的对角化
例4.1
设
A
0 1
1
1 0 1
011 . 求正交阵 P 使P1AP为对角阵.
方阵P为正交阵的充分必要条件
方阵P为正交阵 ÛPTPE PPTE P1PT P的列向量都是两两正交的单位向量. P的行向量都是两两正交的单位向量.
上页 下页 返回
例4.1
设
A
0 1
1
1 0 1
将2 3正交化、单位化得
p2
1 (1, 2
1,
0)T p3
1 (1, 6
1,
2)T .
2
于是P(p1
p2
p3)为正交阵
并且P1AP
1
.
1
上页 下页 返回
二、利用正交矩阵把实对称矩阵化为对称阵的方法
v实对称矩阵对角化的步骤
(1)求出A的全部互不相等的特征值1 2 s
它们的重数依次为k1 k2 ks(k1k2 ksn).
§4.4 实对称矩阵的对角化
一个n阶方阵可以对角化是有条件的, 比如有n个线性无关的特征向量 . 也就是说并非所有n阶方阵都能对角化 但任何实对称矩阵都是可以对角化的.
§4.4 实对称矩阵的对角化
一、实对称矩阵的性质 二、利用正交矩阵
把实对称矩阵化为对角阵的方法
一、实对称矩阵的性质
v定理4.1 实对称阵的特征值为实数.
设1 2是实对称阵A的两个特征值 p1 p2是对应的特 征向量. 若12 则p1与p2正交.
v定理4.3
设A为n阶实对称阵 是A的特征方程的k重根 则对应特 征值恰有k个线性无关的特征向量.
v定理4.4 设A为n阶实对称阵 则必有正交阵P 使P1APPTAP
线性代数—实对称矩阵的对角化

T
9
1 − 1 4 例4 将向量组 α 1 = 2 , α 2 = 3 , α 3 = − 1 − 1 1 0 标准正交化. 标准正交化. 解 β1 = α1 , − 1 1 − 1 − 1 4 5 (α 2 , β 1 ) β2 = α2 − β1 = 3 − 2 = 1 , β2 = 1 , ′ ( β1 , β1 ) 1 6 − 1 3 1 1 ′ (α 3 , β 1 ) (α 3 , β 2 ) ′ β3 = α3 − β1 − β2 ′ ′ ( β1 , β1 ) (β 2 , β 2 )
6 1 4 1 − 1 2 − 5 1 ′ = − 1 − 2 − 1 = 0 , β3 = 0 , 1 0 6 − 1 3 1 3 6
10
1 − 1 1 β1 = 2 , β 2 = 1 , β 3 = 0 , ′ ′ − 1 1 1
再单位化, 再单位化
1 1 − 1 1 1 1 γ1 = 2 , γ2 = 0 . 1 , γ3 = 6 2 3 − 1 1 1
n维基本单位向量组 ε 1 , ε 2 , ⋯ , ε n 是两两正交的。 是两两正交的。
ε 1 = (1, 0, ⋯ , 0)T , ε 2 = (0, 1, ⋯ , 0)T , ⋯ ,
ε n = (0, 0, ⋯ , 1)T ,
4-3-2 实对称矩阵的对角化
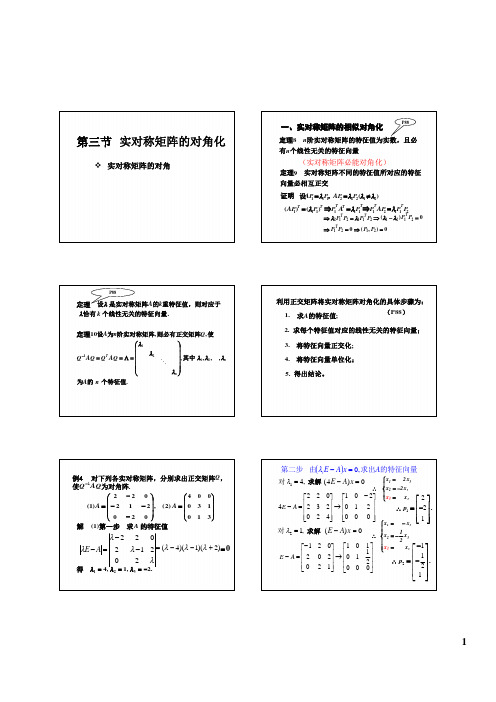
一、实对称矩阵的相似对角化P88第三节 实对称矩阵的对角化v 实对称矩阵的对角化定理8 n阶实对称矩阵的特征值为实数,且必 有n个线性无关的特征向量.(实对称矩阵必能对角化)定理9 实对称矩阵不同的特征值所对应的特征 向量必相互正交. 证明 设AP ,AP 1 =l 1P 1 2 = l2 P 2 (l1 ¹ l2 )T T T ( AP 1 AP 2 =l 1P 1 P 2 1 ) = (l 1P 1) Þ P 1 A =l 1P 1 ÞP T TT 2 1 T 1 1 TTTÞ l P P2 = l P P2 Þ (l1 - l2 ) P1 P2 = 0T 1Þ P P2 = 0 Þ ( P1 , P2 ) = 0P88定理 设l 是实对称矩阵 A的k重特征值,则对应于 l恰有 k 个线性无关的特征向量 . 定理10设A为n阶实对称矩阵, 则必有正交矩阵Q , 使æ l1 ç ç Q -1 AQ = QT AQ = L = ç ç ç è 为A的 n 个特征值.利用正交矩阵将实对称矩阵对角化的具体步骤为: 1.求A的特征值;(P88)2. 求每个特征值对应的线性无关的特征向量; 3. 将特征向量正交化; 4. 将特征向量单位化; 5. 得出结论。
l2ö ÷ ÷ ÷, 其中 l1 , l2 , L , ln O ÷ ln ÷ ø例4 对下列各实对称矩阵,分别求出正交矩阵Q, -1 使Q AQ 为对角阵. æ 2 -2 0 ö æ 4 0 0ö ç ÷ ç ÷ (1) A = ç - 2 1 - 2 ÷ , ( 2) A = ç 0 3 1 ÷ ç 0 -2 0 ÷ ç 0 1 3÷ è ø è ø 解 (1)第一步 求 A 的特征值第二步 由(li E - A)x = 0, 求出A的特征向量 ì x1 = 2 x3 对 l1 = 4, 求解 (4 E - A) x = 0 ï\é2 2 0ù é1 0 - 2ù ú ê ú 4E - A = ê ê2 3 2ú ® ê0 1 2 ú ê ë0 2 4ú û ê ë0 0 0 ú ûí x 2 = -2 x 3 ïx = x3 î 3得 l1 = 4, l2 = 1, l3 = -2.l -2 2 0 lE - A = 2 l -1 2 = (l - 4)(l - 1)(l + 2)= 0 0 2 l对 l2 = 1, 求解 ( E - A) x = 0é- 1 2 0ù é1 0 ú ê E-A=ê ê 2 0 2ú ® ê0 1 ê ë 0 2 1ú û ê ë0 0ì x1 = - x 3 ï 1 ï \ í x2 = - x3 2 ï 1ù ï x3 é î x3 =é2ù ú \ p1 = ê ê -2 ú . ê1û ú ë1ú 2ú 0ú û-1 ù ê 1ú \ p2 = ê - ú . ê 2ú ê 1 ú ë û1对 l3 = -2, 求解 ( -2 E - A) x = 01ù é 0 ù ê1 0 - ú \ é2 2 2 ú ê ú - 2E - A = ê ê2 - 3 2 ú ® ê0 1 - 1 ú ê ë 0 2 - 2ú û ê0 0 0 ú ê ú ë ûê ú \ p3 = ê 1 ú . ê1ú ê ú 第三步 将特征向量正交化 ë û 由于p1 , p2 , p3是属于A的3个不同特征值l1 , l2 ,第四步 将特征向量单位化 p 令 pi 0 = i , i = 1, 2, 3. pi1 ì ï x1 = 2 x 3 ï í x 2 = x3 ïx = x 1 ù 3é ï 3 ê2ú î得æ1 3ö æ -2 3 ö æ 23ö ç ÷ ç ÷ ç ÷ 0 0 p = ç -2 3 ÷ , p2 = ç -1 3 ÷ , p3 = ç 2 3 ÷ . ç 13 ÷ ç 2 3÷ ç 23÷ è ø è ø è ø0 1æ 2 -2 1 ö 1ç ÷ 作 Q = ( p10 , p2 0 , p30 ) = ç -2 -1 2 ÷ , 3ç 2 2÷ è 1 øl3的特征向量, 故它们必两两正交.则æ4 0 0 ö ç ÷ Q -1 AQ = ç 0 1 0 ÷ . ç 0 0 -2 ÷ è øæ 4 0 0ö ç ÷ (2) A = ç 0 3 1 ÷ ç 0 1 3÷ è ø l -4解: lE - A =对 l1 = 2, 求解 ( 2 E - A) x = 00 l -3 -120 00 -1l -3é- 2 0 0 ù é1 0 0ù ú ê ú 2E - A = ê ê 0 - 1 - 1ú ® ê0 1 1ú ê 0 - 1 - 1ú ê0 0 0û ú ë û ëì x1 = 0 ï \ í x2 = - x3 ïx = x 3 î 3= (l - 2)(l - 4) ,得特征值 l1 = 2, l2 = l3 = 4.é0ù ú \ p1 = ê ê -1ú . ê1û ú ë对 l2 = l3 = 4, 求解 ( 4 E - A) x = 0é0 0 0 ù é0 1 - 1ù ú ê ú 4E - A = ê ê0 1 - 1ú ® ê0 0 0 ú ê0 - 1 1 ú ê0 0 0 û ú ë û ëp2与p3恰好正交 ,所以 p1 , p2 , p3两两正交.再将 p1 , p2 , p3单位化, 令pi 0 =æ 0 ö æ 1ö ç ÷ ç ÷ 0 p = ç -1 2 ÷ , p2 = ç 0 ÷ , ç 0÷ ç ÷ è ø è1 2 ø0 1ì x1 = x1 ï \ í x2 = x3 ï î x3 = x3é1 ù é 0ù ú , p = ê1 ú . \ p2 = ê 0 ê ú 3 ê ú ê ê ë 0ú û ë1 ú ûpi pi0( i = 1, 2, 3) 得æ 0 ö ç ÷ p3 = ç 1 2 ÷ . ç ÷ è1 2 ø2于是得正交阵0 11 0 ö æ 0 ç ÷ Q = ( p , p2 , p3 ) = ç - 1 2 0 1 2 ÷ ç ÷ è 1 2 0 1 2ø0 0æ 2 0 0ö ç ÷ Q -1 AQ = ç 0 4 0 ÷ . ç 0 0 4÷ è ø3。