单摆非线性动力学
单摆的动力学方程

单摆的动力学方程单摆是一个简单但重要的物理模型,通常由一个质点和一根无摩擦细线组成。
当质点被拉离平衡位置并释放时,它会向前摆动,并在重力作用下保持振动。
单摆的运动规律可以用动力学方程来描述。
单摆最基本的动力学方程是:$mgsin theta = m frac{d^2y}{dt^2}$其中,$m$ 是质点的质量,$g$ 是重力加速度,$theta$ 是线与竖直方向的夹角,$y$ 是质点的垂直位移。
在这个方程中,左边代表重力分量,右边代表质点所受的加速度。
方程的含义是,单摆的运动状态受到两个力的作用:重力和张力。
当质点偏离竖直方向时,重力会产生一个分量,使得质点受到一个向心加速度 $a_c = gsin theta$。
根据牛顿第二定律,质点的运动状态取决于它所受的合力。
由于线的长度不变,所以张力的大小也不变。
因此,单摆的动力学方程可以用重力分量来表示质点所受的合力。
解析单摆的动力学方程可以得到它的运动规律。
对于小振幅振动,即当 $theta$ 较小时,单摆的运动可以近似为简谐运动。
此时,方程可以简化为:$frac{d^2y}{dt^2} + frac{g}{L} y = 0$其中,$L$ 是单摆的长度。
这个方程可以通过微积分的方法求解,得到单摆的振动周期:$T=2pi sqrt{frac{L}{g}}$这个式子表明,单摆的振动周期只与长度和重力加速度有关,与振幅无关。
因此,单摆可以被用作精确的时间测量器,例如在钟表制造和科学实验中。
总之,单摆的动力学方程是描述单摆运动规律的基础。
通过求解方程,我们可以得到单摆的振动特性,并利用它的精确性质来进行时间测量和实验研究。
非线性动力学入门-西安交通大学教师个人主页
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
另一方面梁的轴向应变的表达式也会因变形大小的不同而采用不同的表达式比如小变形时应变而当考虑大变形时可能采用的应变表达式就是进而得到的梁的振动方程将会是一个含有高度非线性项的偏微分方程组
非线性动力学入门
张新华
西安交通大学 工程力学系 2011 年 07 月
前 言
─1687 年,牛顿(Isaac Newton, 1643 ~ 1727)发表了《自然哲学之数学原 理》(Mathematical Principles of Natural Philosophy),标志着经典力学(亦即牛 顿力学)的正式诞生。牛顿力学主要研究自由质点系的宏观运动规律。 ─1788 年,拉格朗日(Joseph Louis Lagrange, 1736 ~ 1813)发表了分析力 学教程(Analytical Mechanics),标志着拉格朗日力学的诞生。Lagrange 力学属 于分析力学的主要内容之一,在位形空间中研究带有约束的质点系动力学。 ─1833 年,哈密尔顿(William Rowen Hamilton, 1805 ~ 1865)对 Lagrange 力学进行了改造,引进了相空间(2n 维空间),对系统内在的对称性(辛对称, Symplectic)进行了刻画。狭义上的哈密尔顿力学只适用于保守系统,而广义 的哈密尔顿力学在适用于非保守系统。哈密尔顿力学也属于分析力学的主要 组成部分。在此后发展起来的量子力学中 Hamilton 力学发挥着巨大的作用。 目前在天体力学、计算 Hamilton 力学,量子力学,甚至弹性力学(即所谓的 辛弹性力学)中哈密尔顿力学依然发挥着重要作用。 ─1927 年,Birkhoff(George David Birkhoff, 1844 ~ 1944)发表了“动力系 统”(Dynamical Systems),标志着 Birkhoff 动力学的正式问世。Birkhoff 动力 学建立了研究非完整力学的框架。 ─1892 ~ 1899, 彭加莱(Henri Poincaré, 1854 ~ 1912)发表了三卷本的“天 体力学中的新方法”(New Methods of Celestial Mechanics),系统性地提出了 研究动力学系统的定性方法,即几何方法。经典力学的目标之一就是设法求 得系统的解析解,而 Poincaré意识到对于大多数非线性系统而言,求其解析 解是不可能的,而必须发展新的研究方法。他超越了他的时代,极富远见地 预测到了非线性系统混沌现象(系统的解对初始条件具有极端敏感依赖性)的 存在。更为重要的是,Poincaré开创了研究非线性动力系统的几何方法,当之 无愧地被誉为非线性科学之父,其影响是划时代的。 ─1892 年,李亚普诺夫(Aleksandr Mikhailovich Lyapunov, 1857 ~ 1918)在 他的博士论文“运动稳定性的一般问题”(General problem of the stability of motion )中,系统地探讨了非线性动力学系统的稳定性问题。他提出了两种研 究稳定性的方法:李亚普诺夫第一方法(间接方法)和李亚普诺夫第二方法(直 接方法)。他从代数角度出发,对动力学系统的研究开创了一个崭新的领域。 彭加莱与李亚普诺夫,前者从几何角度,后者从代数角度,开拓了非线 性科学的研究疆域和研究手段。 ─1963 年,Lorenz(Edward Norton Lorenz, 1917 ~ 2008)发表了“确定性 非周期流”(Deterministic Nonperiodic Flow)的论文,认为大气系统的性态对 初值极为敏感,从而导致准确的长期天气预报是不可能的。该文标志着人类 首次借助于计算机发现了混沌(Chaos)现象的存在。 ─1757 年,欧拉(Leonhard Euler, 1707 ~ 1783)发表了压杆稳定性的论 文,首次探讨了力学系统的分岔现象。作为分岔理论重要分支的突变理 论(Catastrophe Theory)则主要由法国数学家托姆(René Thom, 1923 ~ 2002)于 上个世纪 60 年代创立,由齐曼(Christopher Zeeman,1925 ~)在 70 年代大力 推广普及。 ─1834 年,英国的罗素(John Scott Russell, 1808 ~ 1882)骑着马在 Union 运河上散步时,发现了现在称之为孤立波(又称作孤波,Solitary wave)的 i
参激单摆非线性系统动力学的实验研究
2 实验 方 案
根 据实验 研究 的 内容 , 了更 准确 的测 量实 验数据 , 用如 下 实验 方案 : 制 台一 振动 台一 单 摆 系统 为 采 控
一 采集 系统一 计算机 。其 中单摆 由一 个轻质 杆 和一 个个 在 杆端 部 固定 的小 球组 成 , 长 0 1 I杆质 量 杆 . 1I, T
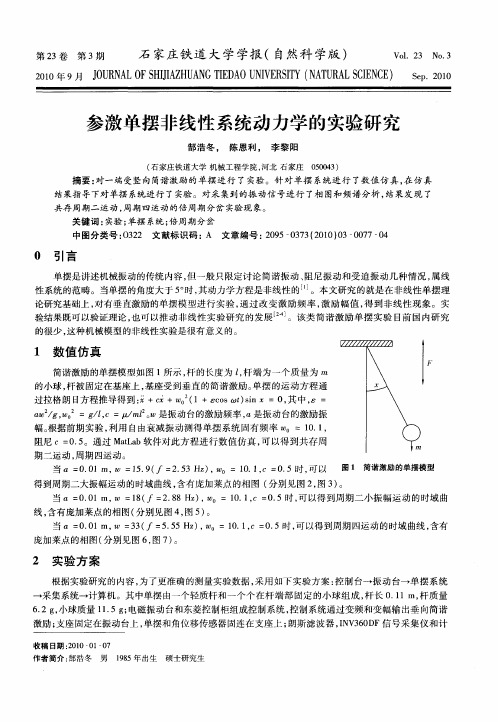
单 摆是讲 述机 械振 动的传统 内容 , 一般 只限定讨 论 简谐 振 动 、 但 阻尼 振 动和 受迫 振 动几 种情 况 , 线 属
性系统 的范 畴。 当单 摆 的角度大 于 5 时 , 动力 学方程 是非 线性 的 … 。本文研 究 的就是 在 非线 性单 摆 理 。 其
论研 究基 础上 , 对有垂 直激励 的单 摆模 型 进 行实 验 , 过 改变 激 励 频 率 , 通 激励 幅值 , 到 非 线性 现 象 。实 得
验结 果 既可 以验 证理论 , 可 以推 动 非线 性 实 验研 究 的 发展 。该 类 简谐 激 励 单 摆 实验 目前 国内研 究 也 的很 少 , 种机 械模 型的非线 性实 验是很 有 意义 的。 这
1 数值 仿 真
简谐激励 的单摆模 型如 图 1 示 , 的长度 为 Z杆 端 为一 个质 量 为 m 所 杆 ,
2 0
5 0
V
趔
iⅢ Ⅱ
0
0
—
5 0
—
1 O
一
l0 0
l 6 】 7
一
2O
~
l 00
— 5 0
第2卷 第3 3 期
石 家庄铁 道 大 学 学报 (自然科 学版 )
V .3 。 o2 . 1 N 3
21年9 JU NL F H IZUN EA N E SY(AUA I C ) S .00 0 0 月 OR A IAH A G I OUI RI N TR L C NE e 21 O SJ TD V T SE p
单摆非线性运动周期的相图处理

, ’ , "!! . / " "" "/ 摆角不大时 ( ) , ( ) 式成为线性运动方程 式中, ! $% "# $ 1 . / "$ ", ! # "0 " , ’ "!! % "" ""
・
( ) !
( ) ’
’ ’ ) 式是一单自由度保守系统, 其哈密顿量 (运动积分) 为 &" "" / 或由能量守恒 ( ! ’’! 3 ", "2 关系有 ’ ’ ’ ( ( " ! !’2 3 ") ! !’2 3 " % !’ "’ " " ")
第( .卷第-期
金亚平: 单摆非线性运动周期的相图处理
" (
" 由于系统的势函数为 ! ( !) $ % !, "#" !# ") 则当能量值低于势垒峰值 ( 时, 单摆 ! $ ! "" ! " 运动表现为势阱中的周期性振荡; 当 $ #" !
时, 单摆作无界的周期运动 (相应于转动) ; 而当
( )
#
相应地单摆周期为
("
"" # &! !% ( % &
( , 当& !!时; % &) %$ ! $ ) / 当& "!时’ " &,
( ) ! !
显然, ( ) 式比 ( ) 式更具普遍性’ 有必要指出的是, 对于界轨邻域上的相点运动 (相应于 &’ ! ! & ) , 单摆振动频率 ! (! ) , 相应的周期 (’ / 因而频率的即使极小的变化也将引 ! ’ " $ # !’ (, 起相位的显著改变, 单摆运动已变得极其复杂, 此时若有外界的不可积扰动, 则界轨线一般会 发生破裂, 并在其附近形成随机层, 这是保守系统中孕育混沌的发源地’ 混沌现象现已成为非 线性科学研究的主要问题之一, 并且越来越受到人们的重视’ 以上结果表明, 在幅角较小时单摆相点作匀速圆周运动, 且单摆周期与幅角$ 无关; 摆幅 " 加大, 则相点作椭圆运动 (或变速圆周运动) , 且单摆非线性频率和周期与幅角 $ 有关’ 此外, " 单摆运动还存在若干稳定点和鞍点 (不稳定点) 使相轨道形成界轨’ 正是在这些界轨邻域使单
非线性动力学

t∈R
x∈ Rn
的解,则显然它是不仅是时间的函数,而且也是初值的函数,即解随着初值的改变而改变, 可以将解记为
φ(t, x0 )
当 x0 是 R n 中的某一点时,φ (t, x0 ) 代表了 1 条解轨线,而
{φ(t, x0 ) x0 ∈ D}
则代表了一族轨线。将φ看成是一个映射,即
φ : R× Rn → Rn
运动行为,它在物理上对应了这样的一个观点:在系统的最初阶段,系统由于外界的初始干 扰,将呈现相当复杂的运动形式,但随着时间的延续,运动将进入平稳状态,而这种平稳状 态体现了动态系统的本质结构。
微分方程解的最终形态通常有: (1) 平衡点 (2) 周期解 (3) 拟周期解 (4) 混沌解
6.4.1 平衡点
图 6-7 所示是 2 维线性系统的相轨线,坐标原点是系统的平衡点,图 6-7a、b 中的平衡 点是稳定的,称为稳定结点,图 6-7c 中的平衡点是不稳定的,称为鞍点。
图 6-7 2 维线性系统的相轨线
6.5.2 任意解的稳定性
设 x = ψ (t)是微分方程 x& = F(t, x)
第 6 章 非线性动力学
-0.5
-1
-1.5
0.5
1
1.5
图 6-2 例 1 相图
例2
如图 6-3 所示是微分方程
&y& + 0.2 y& + y = 0
在相平面 (x1, x2 ) ,
x1 = y
x2 = y&
上的轨线图,平衡点为 (0,0),当 t → ∞ 时,解轨线趋于平衡点。
0.6 0.4 0.2
-0.6
-0.4
-0.2 -0.2
动力学实验讲义
单摆实验讲义单摆是由一摆线l 连着重量为mg 的摆锤所组成的力学系统,是力学基础教科书中都要讨论的一个力学模型。
当年伽利略在观察比萨教堂中的吊灯摆动时发现,摆长一定的摆,其摆动周期不因摆角而变化,因此可用它来计时,后来惠更斯利用了伽利略的这个观察结果,发明了摆钟。
如今进行的单摆实验,是要进一步精确地研究该力学系统所包含的力学线性和非线性运动行为。
练习一是单摆的基础实验,适用于大学低年级开设,练习二是单摆的设计性实验,适用于高年级学生学习和认识非线性物理开设。
练习一 单摆的基础实验一 、实验目的1.学会使用光电门计时器和米尺,测准摆的周期和摆长。
2.验证摆长与周期的关系,掌握使用单摆测量当地重力加速度的方法。
3.初步了解误差的传递和合成。
二 、仪器与用具单摆实验装置,多功能微妙计,卷尺,游标卡尺。
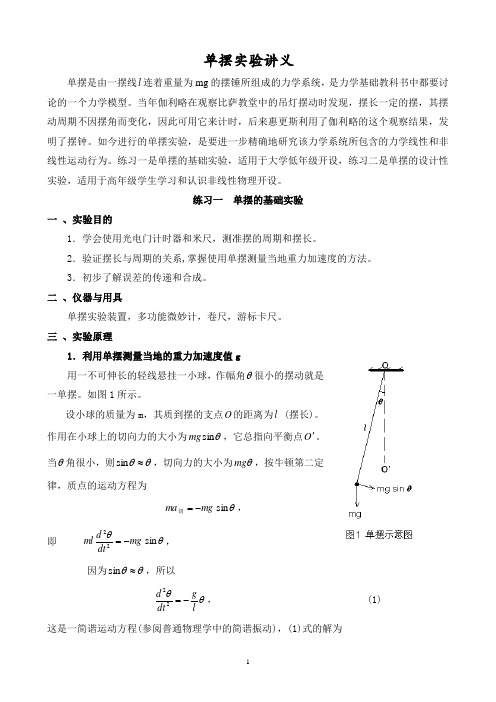
三 、实验原理1.利用单摆测量当地的重力加速度值g用一不可伸长的轻线悬挂一小球,作幅角θ很小的摆动就是一单摆。
如图1所示。
设小球的质量为m ,其质到摆的支点O 的距离为l (摆长)。
作用在小球上的切向力的大小为θsin mg ,它总指向平衡点O '。
当θ角很小,则θθ≈sin ,切向力的大小为θmg ,按牛顿第二定律,质点的运动方程为θsin mg ma -=切,即 θθsin 22mg dtd ml-=,因为θθ≈sin ,所以θθlg dtd -=22, (1)这是一简谐运动方程(参阅普通物理学中的简谐振动),(1)式的解为)cos()(0φωθ+=t P t , (2)lg T==πω20, (3)式中, P 为振幅,φ为幅角,0ω为角频率(固有频率),T 为周期。
可见,单摆在摆角很小,不计阻力时的摆动为简谐振动,简谐振动是一切线性振动系统的共同特性,它们都以自己的固有频率作正弦振动,与此同类的系统有:线性弹簧上的振子,LC 振荡回路中的电流,微波与光学谐振腔中的电磁场,电子围绕原子核的运动等,因此单摆的线性振动,是具有代表性的。
非线性单摆周期的摄动解法
非线性单摆周期的摄动解法程荣龙;宫昊;许永红【摘要】针对非线性单摆的运动方程,基于摄动理论的基本方法(即Lindstedt-Poincare法),给出有效的近似求解方法,求得单摆运动的周期,并通过Matlab仿真讨论解的误差及意义.【期刊名称】《蚌埠学院学报》【年(卷),期】2017(006)006【总页数】3页(P39-41)【关键词】单摆;非线性;周期;奇异摄动【作者】程荣龙;宫昊;许永红【作者单位】蚌埠学院理学院,安徽蚌埠 233030;蚌埠学院理学院,安徽蚌埠233030;蚌埠学院理学院,安徽蚌埠 233030【正文语种】中文【中图分类】O322单摆是物理学理想模型之一,当摆角θ不大于5°时,其运动一般可近似为简谐运动,而实际的动力学方程则是非线性的。
对于单摆非线性运动的周期有多种近似求解方法[1-2],如泰勒级数展开法、正弦函数法、抛物线函数法、积分法、参数法等。
尽管能反映单摆的非线性摆动的主要特征,但不甚精确[2]。
而运用摄动方法求解,既可以提高求解精度,又便于实际计算[3]。
本文尝试应用摄动理论的基本方法(Lindstedt-Poincare方法)对单摆非线性运动的动力学方程进行求解。
一个实际的摆即是复摆。
若忽略其摆球的形状大小,忽略其摆线质量和伸缩量,即为单摆。
设摆长为l,摆球质量为m,则单摆系统的动力学方程为:式中,θ为摆角,若记则表达式(1)及其初始条件即表示为:式(2)为单摆的动力学方程,即为非线性方程。
容易知道,式(2)和式(3)的精确解是第一类完全椭圆积分,利用积分法可求得摆动周期的精确解为[2,4-5]:式(4)中,(k)为第一类完全椭圆积分。
由式(4)可以看出,单摆周期的精确解T是振幅α的函数,随α的值变化。
考虑引入无量纲变量则将式(2)改写成其初始条件为:仅考虑小振幅,若选取小参数ε=α2<<1,式(5)右端作Taylor展开,经整理得可假设式(7)的解为ε的幂级数,即对于式(7)仅考虑n=1时的近似解,并将u、u3和代回式(7)中,比较等式两边ε的同次幂的系数,可得u的递推方程及初始条件。
单摆非线性问题的线化摄动解

摘
要 :物理 学中的单摆 问题 , 在摆 角大于 5 时候 , 动力学方程是 非线性的 , 。 其 这一非线性方程 可用奇异摄 动
法来求得近似解 , 于奇异摄 动法求解过程 比较复杂 , 鉴 尝试将 单摆 的动力 学非线性 方程 进行 线化 , 然后采 用摄 动理 论 中的直接展开 法来求得线化后 的方程的近似 解, 使得 求 解过 程 大大 筒化 。与精确 解比较表 明: 阶近似 解也 具 一 有相 当高的精度 。
比较 同幂 项 同时考虑初 始 条件 ( )有 : 4
f + 0 0 0=0 { 0 ()=1
( )=0 0
() 9
( 1 1)
r + 0 一 7o O)=0 0 l ( 0 + o : / ' { 0 0 0()= (0 1)
【 ( )=0 0
3 直 接 展 开 法 的改 进 】 6
将 ( )式 中 的 s ( 3 i a )做泰 勒级 数展 开 , :i( =a ( ’+ ( +… n 则 sn a ) 一 a) a)
取一 阶近 似 , 3 式 简化 为 : d 0+ () a百 2
dt
a 一
1( ,:0 a)
图 1 单 摆 模 型 图
F g r T emo e fsn l e d l m iu e 1 h d lo ig e p n u u
2 正则 摄 动解 中长期 项 的 问题
为了采用正则摄动法求解 , 我们现将原问题尺度 化。 令
=
譬
d0 2
百
。
+s ( ):O i n
关键词 :非线性 ;单摆 ;奇异摄 动法
中 图分 类 号 :0 2 32 文 献 标 识 码 :A 文 章 编 号 : 17 -1x 20 )20 5 -3 6 26 2 (0 8 0 - 40 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单摆的非线性动力学分析亚兵(交通大学车辆工程专业,,730070)摘要:研究单摆的运动,从是否有无阻尼和驱动力方面来分析它们对单摆运动的影响。
对于小角度单摆的运动,从单摆的动力学方程入手,借助雅普诺夫一次近似理论,推导出单摆的运动稳定性情况。
再借助绘图工具matlab,对小角度和大角度单摆的运动进行仿真,通过改变参数,如阻尼大小、驱动力大小等绘出单摆运动的不同相图,对相图进行分析比较,从验证单摆运动的稳定性情况。
关键词:单摆;振动;阻尼;驱动力Abstract:The vibration of simple pendulum is studied by analyzing whether or not damp and drive force its influence of the simple pendulum. For small angle pendulum motion, pendulum dynamic equation from the start, with an approximate Lyapunov theory of stability of motion is derived pendulum situation. Drawing tools with help from matlab, small angle and wide-angle pendulum motion simulation, by changing the parameters, such as damping size, drive size draw simple pendulum of different phase diagram, analysis and comparison of the phase diagram, from the verification the stability of the situation pendulum movement.Key words: simple pendulum; vibration; damp; drive force1 引言单摆是一种理想的物理模型[1],单摆作简谐振动(摆角小于5°)时其运动微分方程为线性方程,可以求出其解析解,而当单摆做大幅度摆角运动时,其运动微分方程为非线性方程,我们很难用解析的方法讨论其运动,这个时候可以用MATLAB软件对单摆的运动进行数值求解,并可以模拟不同情况下单摆的运动。
θ=时, 随着摆角的减小,摆球的运动速率将越来越大,而加速度将单调下降,至0加速度取极小值。
本文从动力学的角度详细考察了这一过程中摆球的非线性运,得出了在运动过程中.,tθθθ--的关系。
图1 单摆模型2单摆的线性情况2.1线性单摆的无阻尼振动如图所示,忽略细绳重量,也不计小球受到的空气阻力,则上诉单摆可看成理想单摆,对其进行受力分由牛顿第二定律得:θsin mg ma -=(1) 因为2222dtd l dt s d a θ==)(θl s = (2)把(2)代入(1)式可得0sin 22=+θθmg dtd ml(3)将(3)两端同除以ml 可得 0sin 22=+θθl gdt d (4) 令lg=0ω,其中0ω为自然频率.则(4)可变为 0sin 2022=+θωθdtd (5) 当θ很小时,θθ=sin故有,02022=+θωθdt d (6)解此方程得:t i ti e C eC t 0021)(ωωθ-+= (7)若θ为实数,则有θθ=*,即t i t i ti t i e C e C e C e C 000021*2*1ωωωω--+=+ (8)所以, *21C C =, *12C C = (9)令ϕi e A C 21=,ϕi e A C -=22.则有())cos(2)(0)()(0ϕωθϕωϕω+=+=+-+t A e e A t t i t i (10) )cos()(0ϕωθ+=t A t (11)从能量守恒方面考虑:0022=+θωθdtd 可变形为 020=+⋅⎪⎭⎫ ⎝⎛θωθθθdt d d dt d d (12) 令dtd θθ=',则有 0''20=+θωθθθd d (13)两边同时乘以θd ,得到 0''20=+θθωθθd d (14)在对两边求积分, ⎰⎰⎰=+θθθωθθd d d 0''20 (15)积分结果为E =+220221'21θωθ (16) 令2'21θ=T (动能),22021θω=V (势能). 则有E V T =+,机械能守恒.E =+220221'21θωθ为椭圆方程:图2 无阻尼单摆的相平面轨迹图3 有阻尼和有驱动力单摆的运动分析有阻尼和有驱动力单摆的运动方程为...2sin cos f t θβθθ++=Ω (17) 在任意大振幅下,方程(17)的解变得十分复杂,下面利用计算机模拟,分别讨论单摆运动随初值的变化和其混沌运动。
3.1 初值不同所产生的t θ-曲线为简单计,设0.10,1,2/3f β==Ω=,当t=0时,两振动初始条件相差极小,有.11.12(0)0, (0)0.01(0)0.01, (0)0θθθθ⎧==⎪⎨⎪=-=⎩ (18) 取0120t s ≤≤,对(6)式在初始值(18)式下利用MATLAB 绘图,其t θ-变化曲线如图4所示(其中实线为1t θ-,虚线为2t θ-)。
图3 有阻尼和驱动力的t θ-图由图4可以看出,当025t s ≤≤时,两条曲线重合,两个解12()()t t θθ、不能分辨;但当25t s ≥时,两条曲线不再重合,两个解12()()t t θθ、、完全不一样,这种混沌运动对初始条件的敏感性称为蝴蝶效应。
3.2 振幅不同所产生的相图.θθ-为简单计,设方程(17)中,除驱动参数f 取变值外,其余参数不变,即0.25,2/3β=Ω=。
对(17)式在初始值式.(0)0, (0)0θθ==下利用MATLAB 作计算模拟绘图,相图.θθ-如图3所示。
当 1.06f =时,振荡周期τ等于外加周期力的周期T ,2/3T τπϖπ===,应应单周期解,其相图.θθ-如图4示。
图4当 1.07f =时,3T τ=,对应三倍周期解,其相图.θθ-如图5示。
图5当周期强迫力的振幅达到某一临界值 1.684f σ=时,2T τ∞→,系统运动出现混沌,其相图.θθ-如图6示。
图64 无阻尼、无驱动力单摆的运动稳定性当单摆的阻尼因数为0时,即当单摆既无驱动力又无阻尼时,单摆的运动方程为0sin =+θθmg ml 此线性系统的本征方程和本征值分别为012=+λ ωλi ,21±=本征值为纯虚根,线形方程的零解是为稳定的。
将初值设定为:初始角度θ=1.8,角速度为0,此时的阻尼因数驱动力都为0,利用matlab ,作出此时的单摆运动的相图为图8所示。
-0.4-0.3-0.2-0.100.10.20.30.4角度角速度图7 阻尼为0驱动力为0单摆的小摆角运动相图由图可知,无阻尼、无驱动力的单摆运动的相图是一个极限环。
因此这种单摆的运动是稳定的。
由此可以验证,当角度很小时,方程的推导是正确的,即线性时是稳定的。
当增大初始角度,令θ=45时保持其他条件不变,利用matlab 绘出大角度单摆无阻尼无驱动里的相图,如图9。
-0.8-0.6-0.4-0.200.20.40.60.8角度角速度图7 阻尼为0驱动力为0单摆的大摆角运动相图由图可知,当摆角变大时,无阻尼、无驱动的单摆运动的相图也是一个极限环,也就是说,此时的单摆运动也是稳定的。
综上所述,由方程推导的结果以及利用工具matlab 绘图所得到的结论都是相同的,即不论摆角的大小,无阻尼、无驱动力的单摆的运动都是稳定的5 结论本文以单摆为研究对象。
研究了实际条件下的单摆问题,即含阻尼的受迫运动。
在受迫阻尼运动中,单摆的运动反映出如下特征,即:(l)描述运动特征的动力学方程是非线性的;(2)这些非线性的方程是“确定性的”,不包含任何随时间变化的随机项; (3)在某些情况下,系统运动轨道的时间行为存在对初始条件的敏感性,初始条件的微小差异可能导致结果的变化非常大;(4)整个系统长期行为的全局特征与初始条件无关。
从本文的分析中,结合各种情况下的位移时间图像及相图,我们可以得出以下结论:(1)在摆角较小即5θ<时,单摆其相轨迹是围绕原点的椭圆曲线,即我们所熟知的简谐运动相轨迹,此时单摆在平衡位置附近作简谐运动;随着摆角的增加,单摆作非线性振动,周期与摆角θ有关,周期随摆角θ的增大而增大。
因此,当摆角较大时,单摆运动存在若干稳定点和鞍点(不稳定点),振动曲线和周期是非线性振动的结果;(2)在有阻尼和有驱动力的情况下,非线性单摆的振动对初始条件非常敏感,称为蝴蝶效应;在有阻尼和有驱动力的情况下,若取某一参数变值由小到大,其余参数不变,非线性振动的相图会出现由单周期解→倍周期解→四周期解…混沌→单周期解…,如此反复。
参考文献[1]王海期.非线性振动[M]. 高等教育,1992,262-278[2]延柱,立群. 非线性振动[M]. 高等教育,2001,-169[3]德丰. MATLAB数值计算方法[M].机械工业,2010,225-239[4]欣亚,明路. 机械振动[M]. 清华大学,2009,587-589[5]中奎,徐伟,晓丽.求解强非线性动力系统响应的一种新方法[J]. 动力学与控制学报,第3卷第2期,2005,29-35[6]文涛,龚善初. 单摆振动分析[J]. 理工学院学报,第21卷第1期,2008,66-70[7] Kunihik Kaneko.Oscillation and doubling of torus [J]. Progress ofTheoretical Physics,1984,72(2).[8] 伟,霍拳忠,骊.非线性振动系统的异宿轨道分叉、次谐分叉和混沌[J].应用数学和力学,1992 ,13:.[9] 谢柏松.单摆运动的同宿轨道分叉、次谐分叉和混沌[J].师大学学报,2000,36(5):631.[10] 郎和.保守单摆系统中的混沌运动[J].西北师大学学报,2002 ,38 (4):108.[11] 元杰.单摆的规则运动及混沌运动的研究[J ].大学物理,1998 ,17(9):6.非线性系统控制理论单摆的动力学分析学院:机电工程学院专业:车辆工程:亚兵学号:0211362。