太阳能槽式聚光反射镜自动跟踪装置
太阳能光热发电原理 太阳能光热发电的主要形式有哪些

太阳能光热发电原理太阳能光热发电的主要形式有哪些光热发电技术,是不同于光伏发电的全新的新能源应用技术。
它是一个将太阳能转化为热能,再将热能转化为电能的过程。
关于“太阳能光热发电原理太阳能光热发电的主要形式有哪些”的详细说明。
1.太阳能光热发电原理光热发电技术,是不同于光伏发电的全新的新能源应用技术。
它是一个将太阳能转化为热能,再将热能转化为电能的过程。
利用聚光镜等聚热器采集的太阳热能,将传热介质加热到几百度的高温,传热介质经过换热器后产生高温蒸汽,从而带动汽轮机产生电能。
此处的传热介质多为导热油与熔盐。
通常我们将整个的光热发电系统分成四部分:集热系统、热传输系统、蓄热与热交换系统、发电系统。
集热系统:集热系统包括聚光装置、接收器、跟踪机构等部件。
如果说集热系统是整个光热发电的核心,那么聚光装置就是集热系统的核心。
聚光装置即为聚光镜或者定日镜等。
其反射率、焦点偏差等均能影响发电效率。
目前国内生产的聚光镜,效率可以达到94%,与国外生产的聚光镜效率相差不大。
集热系统采集太阳能,将太阳能转化为热能。
热传输系统:热传输系统主要是传输集热系统收集起来的热能。
利用传热介质将热能输送给蓄热系统。
传热介质多为导热油和熔盐。
理论上,熔盐比导热油温度高,发电效率大,也更安全。
热传输系统一般有预热器、蒸汽发生器、过热器和再热器等组成。
热传输系统的基本要求是:传热管道损耗小、输送传热介质的泵功率小、热量传输的成本低。
在热传输过程中,传热管道越短,热损耗就越小。
蓄热与热交换系统:个人认为,光热发电技术在蓄热与热交换系统中充分体现了对比光伏发电技术的优势。
即将太阳热能储存起来。
可以在夜间发电,也可以根据当地的用电负荷,适应电网调度发电。
蓄热装置常由真空绝热或以绝热材料包覆的蓄热器构成。
蓄热系统中对储热介质的要求为:储能密度大,来源丰富且价格低廉,性能稳定,无腐蚀性,安全性好,传热面积大,热交换器导热性能好,储热介质具有较好的黏性。
光热发电(槽、塔、碟)

光热发电太阳能光热发电是指利用大规模阵列抛物或碟形镜面收集太阳热能,通过换热装置提供蒸汽,结合传统汽轮发电机的工艺,从而达到发电的目的。
采用太阳能光热发电技术,避免了昂贵的硅晶光电转换工艺,可以大大降低太阳能发电的成本。
而且,这种形式的太阳能利用还有一个其他形式的太阳能转换所无法比拟的优势,即太阳能所烧热的水可以储存在巨大的容器中,在太阳落山后几个小时仍然能够带动汽轮发电。
目录简介太阳能光热发电是新能源利用的一个重要方向。
太阳能光热发电是太阳能利用中的重要项目,只要将太阳能聚集起来,加热工质,驱动汽轮发电机即能发电。
1950年,原苏联设计了世界上第一座太阳能塔式电站,建造了一个小型试验装置。
太阳能光热发电70年代,太阳电池价格昂贵,效率较低,相对而言,太阳热发电效率较高,技术比较成熟,因此当时许多工业发达国家都将太阳热发电作为重点,投资兴建了一批试验性太阳能热发电站。
据不完全统计,从1981~1991年,全世界建造的太阳能热发电站(500kw以上)约有20余座,发电功率最大达80mw0按太阳能采集方式划分,太阳能热发电站主要有塔式、槽式和盘式三类。
这些电站基本上都是试验性的。
例如,日本按照阳光计划建造的一座1mw塔式电站,一座1mw槽式电站,完成了试验工作后即停止运行。
美国10mw太阳1号塔式电站,进行一段时间试验运行后及时进行技术总结,很快将它改建为太阳:号电站,并于1996年1月投入运行。
80年代中期,人们对建成的太阳能热发电站进行技术总结后认为,虽然太阳能热发电在技术上可行,但投资过大(美国太阳:号电站投资为1.42亿美元),且降低造价十分困难,所以各国都改变了原来的计划,使太阳能热发电站的建设逐渐冷落下来。
例如,美国原计划在1983~1995年建成5~10万kw和10~30万kw太阳能热电站,结果没有实现。
4 t7 正当人们怀疑太阳能热发电的时候,美国和以色列联合组成的路兹太阳能热发电国际有限公司,自1980年开始进行太阳热发电技术研究,主要开发槽式太阳能热发电系统,5年后奇迹般地进入商品化阶段。
48v太阳能槽式聚光储能发电

在全球能源转型的大潮中,可再生能源备受关注。
其中,太阳能作为一种清洁、可持续的能源,蕴藏着巨大的潜力。
而48V太阳能槽式聚光储能发电技术,则是太阳能领域的一项突破性创新。
槽式聚光系统的原理槽式聚光系统是一种利用抛物面反射镜将太阳光聚焦到接收管上的太阳能技术。
抛物面反射镜的形状设计能够将平行入射的太阳光聚焦到一条直线上,从而提高太阳能的利用率。
接收管通常采用黑体表面,能够有效吸收聚焦后的太阳光并将其转化为热能。
48V系统优势传统的太阳能光伏系统工作电压一般为24V或36V,而48V太阳能槽式聚光系统则采用了更高的直流电压。
高电压系统具有以下优势:•降低传输损耗:通过提高电压,可以降低线路中的电流,从而减少传输损耗。
•提高功率密度:更高的电压可以使相同功率的系统采用更小的线缆和开关器件,提升功率密度。
•降低系统成本:高电压系统可以节省线缆和开关器件的成本,从而降低整体系统成本。
储能发电的意义储能是太阳能发电系统的关键环节。
通过将白天多余的太阳能存储起来,可以在夜间或阴雨天气持续供电,确保能源的稳定供应。
48V太阳能槽式聚光储能发电系统采用高电压电池组,具有以下特点:•大容量存储:高电压电池组可以存储更多的电能,满足长时段的供电需求。
•高充放电效率:高电压电池组的充放电效率更高,减少了能量损失。
•长循环寿命:高电压电池组的循环寿命更长,降低了维护成本。
系统应用48V太阳能槽式聚光储能发电系统具有广泛的应用前景,包括:•离网供电:为偏远地区、岛屿等缺乏电网覆盖的地区提供稳定可靠的电力供应。
•备用电源:为医院、数据中心等重要设施提供备用电源,保障关键用电需求。
•微电网系统:与其他可再生能源和储能技术相结合,构建分布式、低碳的微电网系统。
技术展望48V太阳能槽式聚光储能发电技术仍在不断发展和优化。
未来,该技术有望取得进一步突破,包括:•更高效的聚光系统:通过优化反射镜形状和材料,提高太阳光的聚焦效率。
•更稳定的接收管:研发耐高温、耐腐蚀的接收管材料,延长系统寿命和提高发电效率。
槽式太阳能跟踪控制系统的研制与应用

槽式太阳能跟踪控制系统的研制与应用摘要:太阳能是可再生资源,随着我国能源消耗形势的加剧,做好太阳能的利用关系到经济的发展。
本文分析槽式太阳能跟踪控制系统的相关内容,希望能够对读者提供一些借鉴和参考。
关键词:槽式太阳能跟踪控制系统;原理;设计前言太阳能资源取之不尽用之不竭,是清洁能源。
对太阳能的开发具有重要的商业价值。
通过对太阳能跟踪控制系统的应用能够大大提高对太阳能的利用。
二、太阳能跟踪系统跟踪原理系统在跟踪时刻选择太阳运行轨迹跟踪方式,调整电池板到滞后30min的位置,存储当前位置信息并等待30min,然后启动光电传感器跟踪以校正太阳运行轨迹跟踪产生的误差。
光电检测模块检测到信号的电压差值超过阈值时驱动直流电机旋转,直到电压差值小于阈值,再等待30min,进入下一次跟踪循环,实现全天实时跟踪。
三、系统总体设计1、跟踪方案选择本系统采用时控法与反馈修正法相结合的控制方式,开始时,由当地经纬度、实时时间,通过天文算法计算出当前太阳的高度角h及方位角γ。
从控制器根据此信息通过程序处理后发出相应的脉冲、方向信号,驱动执行机构,使光伏组件快速对准太阳的理论位置,完成初步跟踪。
由于跟踪过程中存在误差,倾角仪采集光伏组件跟踪后的角度并反馈给从控制器,然后从控制器判断角度偏差是否在允许范围内,如果超出该范围,控制器输出相应的脉冲完成微调,使偏差角度达到偏差要求,偏差在允许范围内系统重复上述过程,完成整个跟踪过程。
2、控制方式的选择目前主流的控制方式主要分为:集中式控制、分散式控制、集中式与分散式相结合的控制方式,综合比较以上种方法优缺点及电站运行特点后,该系统采用主从控制器相互配合集中式与分散式相结合的控制方式。
控制方式拓扑图如图1所示。
图1 控制方式拓扑图如图1所示,主从控制器相互配合组成了整个控制系统,主控制器采用比从控制器运算速度快、处理信息量大的CPU,主要完成对从控制器信息的传输,信号模块信息采集,特殊天气下的集控;每个从控制器完成太阳位置计算,逆变器发电量信息采集,响应反馈信息发出相应脉冲完成对执行机构的驱动,从而实现对太阳的追踪。
槽式光热发电技术方案简介
槽式光热发电电站总体技术方案1 聚光系统1.1 聚光吸热系统的分层结构由28个反射镜面(RP)和3个吸热管(HCE)组成太阳能集收元件(SCE),由12个SCE连接构成太阳能集收组合(SCA),4个SCA组成一个回路(LOOP),156个回路的集合构成太阳集热场区(SOF)。
1.2 聚光系统聚光系统是本工程的核心系统,由槽式抛物面反光镜跟踪装置构成。
跟踪方式通常采用一维跟踪,有南北、东西布置方式。
根据太阳能热发电站年上网电量应不低于1.2亿kW.h,太阳能转换为电能的平均效率不低于11%的要求,计算后的年平均效率,计算后需要50余万平米的反光镜集热面积。
即需要624个集热器,156个回路数。
(根据η总=年上网发电量/ 年直射辐射总量×反光镜总采光面积,集热场主要系统图见下图)。
1.3 设备的选型太阳能集热器组合(SCA)包括:镜面、背架、集热管(吸热系统章节进行详细阐述)、跟踪系统(包括:驱动、控制和传感器)。
(1) 反射镜面玻璃镜面的技术要求:4-5mm厚度,反射率93%,强度、刚性和耐老化符合25年使用要求,重量约11 kg/m²。
经过对国内镜面厂家的调研情况来看,目前各大镜面厂家都掌握镜面镀膜的生产技术,都在建设厂房,引进国外生产线,预计明年可实现量产。
以51.75万平方米的太阳能集热面积计算,玻璃镜面:559593m²。
各参数数据见下表:槽式抛物面聚光反射镜性能参数表(2) 聚光器槽式抛物面聚光器由钢结构支架及旋转动力源,聚光器跟踪控制和吸热管金属管活动接头组成。
聚光器跟踪控制采用DCS控制,下表为其具体性能参数。
槽式抛物面聚光器性能参数表(3) 集热管本项目,真空管技术参数见下表。
直通式真空吸热管性能参数表一般采用集热器(SCA)轴线南北线水平布置,由东向西跟踪太阳。
也有的集热器(SCA)轴线南北线以一定倾角(小于8°倾角)放置,由东向西跟踪太阳,未得到实际应用,仅处在概念设计或试验研究阶段;槽式集热器也有采用双轴跟踪的,但这种跟踪方式从经济角度考虑是不可行的。
槽式太阳能集热实验装置设计
槽式太阳能集热实验装置设计作者:鲁红光来源:《硅谷》2012年第19期摘要:介绍太阳能光热发电技术系统中槽式太阳能光热发电原理,教学用槽式太阳能集热系统结构设计、测试方法。
关键词:太阳能;光热发电;槽式;集热器;教学实验0 引言太阳能是一种取之不尽、用之不竭的清洁能源。
太阳能的利用主要包括三方面:一是太阳能热利用,以全玻璃真空管集热器和平板集热器为主的太阳能热水器,我国以跃居世界总产量首位;二是太阳能电池技术,以晶体硅为主的太阳能光伏发电技术成长迅速;三是太阳能热动力发电,太阳能热动力发电是太阳能工程中一项具有广阔发展前景的重大项目,槽式太阳能热动力发电站的成功实践表明,太阳能热动力发电具有效率高、容量大、可比经济指标好等重大优势,特别适合大规模开发利用,为此世界发达国家纷纷投入巨资建立太阳能热动力电站。
太阳能热动力发电在我国迅速发展,使得太阳能光热发电专业技术人才成为紧缺人才,各大专院校为此相继成立了太阳能光热利用专业,为社会培养太阳能光热发电技术人才,为实践教学需要,太阳能光热利用专业急需专业实验设备,本文主要研究设计用于教学的太阳能槽式集热系统。
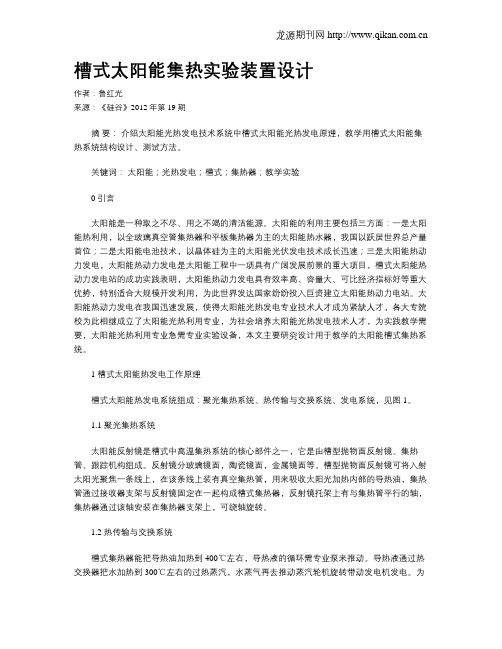
1 槽式太阳能热发电工作原理槽式太阳能热发电系统组成:聚光集热系统、热传输与交换系统、发电系统,见图1。
1.1 聚光集热系统太阳能反射镜是槽式中高温集热系统的核心部件之一,它是由槽型抛物面反射镜、集热管、跟踪机构组成。
反射镜分玻璃镜面,陶瓷镜面,金属镜面等。
槽型抛物面反射镜可将入射太阳光聚焦一条线上,在该条线上装有真空集热管,用来吸收太阳光加热内部的导热油,集热管通过接收器支架与反射镜固定在一起构成槽式集热器,反射镜托架上有与集热管平行的轴,集热器通过该轴安装在集热器支架上,可绕轴旋转。
1.2 热传输与交换系统槽式集热器能把导热油加热到400℃左右,导热液的循环需专业泵来推动。
导热液通过热交换器把水加热到300℃左右的过热蒸汽,水蒸气再去推动蒸汽轮机旋转带动发电机发电。
槽式太阳能聚焦集热器太阳跟踪方式的优化研究
0 引言 能源是人类赖以生存和进步的重要物质基
础,由于太阳能资源清洁、环保、取之不尽用之 不竭 [1],因此被视作当今最理想的化石燃料的替 代能源之一。从电力角度来看,光伏发电技术和 太阳能热发电技术为主要的太阳能发电技术,但 由于目前光伏发电技术中太阳电池的光电转换效 率已经很难得到大幅提高,因此,太阳能热发电 成为当前研究的重点。
槽式太阳能聚焦集热系统是太阳能热发电技 术的重要方式,目前其开发重点是提高槽式太阳 能聚焦集热器的集热效率,如:提高抛物面反射 镜表面的加工精度、研制高反射率材料等。值得
注意的是,由于槽式太阳能聚焦集热器只能收集 太阳的直射光线,所以在利用其聚光时,可通过 研究合适的太阳跟踪方式来实现该集热器的最大 集热效率。根据跟踪轴的数量不同,槽式太阳能 聚焦集热器的太阳跟踪方式可分为双轴跟踪方式 和单轴跟踪方式。其中,双轴跟踪方式需要对太 阳高度角和太阳方位角同时进行跟踪,以保持太 阳入射光线和主光轴方向一致 [2],该跟踪方式主 要可分为极轴 - 赤纬轴跟踪方式和高度角 - 方 位角跟踪方式;而单轴跟踪方式仅对太阳高度角 或太阳方位角进行跟踪,使太阳入射光线位于主 光轴和焦线组成的平面即可 [3],该跟踪方式主要 包括南北倾斜式跟踪方式、南北水平式跟踪方式
方式进行了单独研究,确定了南北倾斜式跟踪方式在海口市、拉萨市、上海市、北京市和呼和浩特市 5 个地
区的最佳倾角分别为 18.81°、27.29°、28.67°、36.21°和 37.97°。 关键词:槽式太阳能聚焦集热器;抛物面反射镜;太阳直射辐射量;太阳跟踪方式
中图分类号:TK519
文献标志码:A
张云鹏 1,孔 莉 2*,林志坚 3,仇中柱 1,李春莹 4
(1. 上海电力大学 能源与机械工程学院,上海 200090;2. 上海市嘉定区气象局气象台,上海 201800; 3. 博阳新能源科技股份有限公司,上海 201620;
蝶式、槽式 、塔式太阳能发电区分详解

太阳能热发电种类错误!未找到引用源。
错误!未找到引用源。
幻灯片3碟式太阳能热发电系统碟式太阳能热发电系统是利用旋转抛物面的碟式反射镜将太阳聚焦到一个焦点。
碟式系统的太阳能接收器也不固定,随着碟形反射镜跟踪太阳的运动而运动,克服了塔式系统较大余弦效应的损失问题,光热转换效率大大提高碟式接收器将太阳聚焦于旋转抛物面的焦点上,而槽式接收器则将太阳聚焦于圆柱抛物面的焦线上,因此碟式接收器可以产生高温。
幻灯片4幻灯片5幻灯片6系统特性高聚光比:500-2000聚光表面温度:1000-1300℃效率高:28-30%面积不可能太大,因此功率1~50kW。
太阳能利用效率高:国外文献报道:该系统可将的辐射能转化成的电能,最高效率%发电规模灵活,安装简便,不需用水沙漠等缺水区域可用。
幻灯片7系统组成碟式抛物面太阳能聚光器碟式太阳能集热器斯特林发动机发动机及电输出系统幻灯片8碟式抛物面太阳能聚光器小聚光镜组合式结构简单,造价低间隙,面积利用率低镜面张膜式结构简单,造价低聚光镜拼接式面积利用率高,精度高幻灯片9碟式太阳能集热器间接式集热器相变换热,碱金属(钠、钾,钠钾合金等)热量传递快、容量大,温度恒定相变式、热管式、混合式直接式集热器温度分布极不均匀发电不稳定,不均匀幻灯片10斯特林发动机(引擎)Stirling Engine苏格兰牧师、物理学家、热力学家——Robert Stirling1816年,申请专利。
热机、外燃机理论效率——最大效率,卡诺循环效率幻灯片11幻灯片12幻灯片13斯特林机α- 型斯特林机:两个独立动力活塞,热活塞密封,精密加工β- 型斯特林机:隔离活塞,直线型气缸,斯特林申请专利机型,工艺易实现,最适用机型γ- 型斯特林机:与β类似,但动力活塞和隔离块分开,也是最适用机型幻灯片14幻灯片15幻灯片16幻灯片17碟式热发电系统的优点光热转换效率高达85%左右,在三类系统中位居首位;使用灵活,既可以作分布式系统单独供电,也可以并网发电。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
太阳能槽式聚光反射镜自动跟踪装置3徐丽霜, 李 明, 魏生贤, 周希正(云南师范大学物理与电子信息学院,云南昆明650092)摘 要: 在分析太阳运行规律的基础上,提出一种太阳跟踪的新方案。
描述了槽式聚光反射镜自动跟踪装置的机械结构及跟踪控制的原理、方法,给出具体应用实例。
槽式聚光装置的应用前景十分广泛,可用于太阳能制冷、供暖、海水淡化等各种生产、生活领域。
关 键 词: 槽式聚光反射镜;太阳能自动跟踪;机械结构;自动控制中图分类号: T K513.4 文献标识码: A 文章编号: 1007-9793(2006)01-0030-04 能源是人类社会赖以生存和发展的物质基础。
当前,包括我国在内的绝大多数国家都以石油、天然气和煤炭等矿物燃料为主要能源。
随着地球人口的增长、矿物燃料的日益枯竭和全球环境的不断恶化,利用太阳能已成为人们研究的热点问题之一。
但太阳能是一种能流密度低、辐射具有间歇性、空间分布又不断变化的能源,与常规能源有很大的区别,这就对太阳能的收集和利用提出更高的要求。
目前被广泛应用的太阳能热水器即使采用真空热管技术,夏天也只能达到70~90℃,冬天只有40~50℃,这个温度范围只能用于家庭淋浴,无法提供工业上广泛应用的200~300℃的热蒸汽。
为有效地提高太阳能能流密度,需采用聚焦、跟踪技术,其关键装置就是聚光器、跟踪传动机构、自动控制系统。
本文在探讨了太阳辐射的理论基础上,设计出一种利用电机驱动聚光器定时跟踪太阳的装置,以期解决太阳能利用中能流密度低的问题。
1 自动跟踪装置的结构和工作原理整个装置包括槽式聚光反射镜、机械传动机构、吸热器、跟踪控制四部分。
图1为试验装置原理图。
槽式聚光反射镜1把投射来的太阳光聚集到吸收器2上,以提高能流密度,吸收器把这一能量传递给工作介质。
而自动跟踪装置3、4、5、6、7是用来跟踪太阳,保证聚光反射镜始终以最佳角度反射太阳光。
图1 系统结构图Fig.1 System structure diagram1.槽式聚光反射镜;2.吸热器;3.支架;4.高度角传动机构;5.方位角传动机构;6.步进电机;7.水平转台1.concentrating trough mirror2.solar col2lector3.bracket4.gearing of altitude angle5.gearing of azimuth angle6.step-motor7.horizontal desk系统控制原理是采用负反馈技术:即通过程序计算出太阳在反射镜所处地理位置某时刻的高度角和方位角,同角度传感器采集得到反射镜实际的角度相比较,计算出反射镜需要转动的角度,然后控制高度角和方位角两个方向上的步进电机,驱动反射镜转动相应的角度来跟踪太阳。
本装置采用了一个照度传感器和两个角度传感器。
照度传感器检测太阳的辐射强度,预先设 第26卷第1期2006年1月云南师范大学学报Journal of Yunnan Normal UniversityVol.26No.1J an.20063收稿日期:2005-08-24基金项目:云南省自然科学基金项目(2005E0031M);云南省教育厅自然科学基金重点项目(2003253).作者简介:徐丽霜(1976-),女,河北省景县人,硕士研究生,主要从事太阳能方面的应用和研究.通讯作者:李明,男,博士,教授;Email:lmdocyn@.定一个工作辐照强度值,当检测到的太阳辐照度低于此设定值时,控制单元不工作;当高于此设定值时,控制单元开始工作。
角度传感器则用来分别检测反射镜实际的高度角和方位角。
高度角跟踪机构的作用是让反射镜绕俯仰轴旋转,以跟踪太阳的高度角,一般而言,就是从东向西转动。
方位角跟踪机构的作用是让反射镜绕方位轴旋转,它的旋转平面是水平面。
2 地球绕太阳运行的规律及太阳角的计算2.1地球公转和自转、赤纬地球绕太阳的公转轨道为椭圆形,太阳为焦点之一,近日点是1月3日,远日点是7月4日。
公转一周需365.25天,将360°作24等分,每15°为一个节气,共24个节气。
地球自转轴与公转平面呈66°33′的夹角,且朝向不变。
地球自转一周为24小时,所以地球每小时自转15°,自转过程中总有半个球面朝向太阳,另半个背向太阳,形成昼夜[1]。
太阳直射点就是太阳光线与地平面的垂直交点。
赤纬就是太阳直射点所处的纬度,用δ表示。
它是随季节不断变化的。
由于自转轴与公转平面不垂直,且倾斜方向不变,使得太阳直射点变动于南北回归线之间,即:-23°27′≤δ≤23°27′。
每日的δ值可查天文年历,也可以用以下式子计算[2]:δ=23.45sin360(N+284)365其中N为日序,δ的单位为度。
2.2太阳高度角、方位角太阳的位置可以用两个坐标来表示,即太阳高度角和方位角。
太阳高度角是太阳光线与地平面的夹角。
太阳方位角是太阳光线在地面上的投影与当地子午线的夹角。
子午线是指通过当地的经线,即正南方和正北方的连线。
如图2所示。
图2 高度角、方位角定义示意图Fig.2Diagram of Altitude and Azimuth Angle太阳高度角h的大小取决于纬度、季节和一天中的时间。
计算时,纬度用Φ表示,在北半球为正,南半球为负。
季节用太阳赤纬δ表示。
一天中的时间用时角ω表示。
ω=15°(t-12)其中t是时间,单位是小时。
太阳高度角h与纬度Φ、太阳赤纬δ、时角ω之间的关系如下[2]:sin h=sinΦsinδ+co sΦcosδco sω正午时的时角ω=0,因此通常使用的正午太阳高度角为:sin h=sinΦsinδ+cosΦcosδ,h=90°-|Φ-δ|太阳方位角A与纬度Φ、太阳赤纬δ和太阳高度角h的关系为[2]:cos A=sin h sinφ-sinδco s h cosφ3 跟踪方案在已有的太阳能自动跟踪方案中,主要有两种:光电跟踪[3],定时跟踪[4]。
光电跟踪:利用光敏电阻在光照时阻值发生变化的原理,将光敏电阻安装在太阳能聚光器下方边缘处,太阳光垂直照射时,光敏电阻受聚光器的遮挡接收不到光照,没有信号输出,电机不转动。
当太阳光倾斜入射时,光敏电阻输出偏差信号,使电机带动反射镜转动完成跟踪。
光电跟踪精度高,结构设计简单;但受天气影响较大,例如多云天气会试图跟踪云层边缘的亮点,电机往复运行,造成了能源的浪费和部件的额外磨损。
定时跟踪:根据太阳在天空每分钟的运动角度,计算出太阳能聚光器每分钟应转动的角度,从而确定出电机的转速,使得聚光器根据太阳的位置而相应变动。
这种方法采用程控系统,但程序跟踪本身存在许多局限性,例如安装运行前需要精确定位,出现误差后又不能自动调整。
经分析、比较,提出一种传感系统和程控系统相结合的控制方式,即采用定时法原理进行程序控制,同时利用传感器对聚光器进行实时监测和定位。
以消除由机械结构等因素引起的累计误差。
按照太阳入射光线和反射镜主光轴的位置关系跟踪系统可划分为单轴跟踪型和双轴跟踪型[5]。
(1)单轴跟踪型:跟踪系统的转轴南北(东西)方向安装,东西(南北)转动跟踪。
(2)双轴跟踪型:跟踪系统有方位轴和俯仰轴两个转轴。
方位轴垂直于水平面,俯仰轴同方位轴垂直。
反射镜同时绕两个轴转动以使反射镜的光轴和太阳光线方向一致。
如图3所示:・13・ 第1期徐丽霜,等: 太阳能槽式聚光反射镜自动跟踪装置图3 跟踪方式示意图Fig.3 Diagram of Tracking Modes双轴跟踪时吸收器收集到的能量最大,反射镜的光学性能也最好。
因此本装置采用双轴跟踪型。
4 传动结构本装置传动结构分为水平转台和垂直转台即方位角传动机构和高度角传动机构两部分。
高度角传动机构流程为:步进电机-减速器-齿轮-反射镜。
方位角传动机构流程为:步进电机-减速器-水平转台-反射镜。
由前面太阳运行规律的分析计算可知:太阳高度角一天内的变化范围为0°~180°。
由日序、赤纬角以及当地的纬度可计算出反射镜从上午9点到下午5点之间需要转动的范围为140度左右。
因此传动机构选用两相步进电机(保持转矩7.6Nm ,步距角1.8度),精密行星齿轮减速器传动比1:25,驱动器选用4细分,则电机转动100°,反射镜相应转动1°。
步进电机步距角为1.8°/4=0.45°,故反射镜每转动1°时,控制卡需发脉冲100/0.45个脉冲。
同样,在方位角传动机构上,假如太阳实际方位角与传感器测得的反射镜的方位角的差值为а度,减速器传动比为150:1,则每天就需要给方位角步进电机发送150а/0.45个脉冲。
5 控制系统5.1控制系统硬件组成太阳能聚光反射装置的自动跟踪系统主要由传感器单元、PC 控制单元、执行机构、电源组成,其中执行机构由步进电机和传动机构组成。
跟踪系统的结构如图4所示。
本装置通过PC 机直接读取系统相关参数、控制自动跟踪系统。
利用两轴PC 控制卡发送脉冲分别控制高度角步进电机和方位角步进电机。
具体实现如下:图4 跟踪系统原理方框图Fig.4 Block Diagram of the Tracking System(1)通过pc 机利用vb 编制程序,计算出反射镜所在地理位置某一时刻的高度角和方位角,和传感器采集得到的反射镜实际的角度比较,计算出需要转动的角度,对电机控制卡进行读写操作,向控制卡发送位置、速度、加速度命令。
(2)控制卡根据主机的命令产生脉冲序列发送给电机驱动器。
(3)步进电机驱动器根据接收到的脉冲信号,产生多拍节驱动信号控制步进电机旋转。
(4)电机通过减速器驱动负载转动相应角度。
5.2控制系统软件设计控制流程图如图5所示:系统控制流程说明如下:系统开机启动,初始化设备和相关参数后,首先读取时钟芯片得到系统日期和时间,如果时间在上午9点和下午17点之间,系统正常工作;在下午17点时,反射镜复位到平衡位置;在下午17点到上午9点之间,系统一直保持在平衡位置。
通过光照传感器采集光照强度,以判断是否阴天,有云或者其它遮盖,如果采集到的光强小于系统的设定值(该值可以通过PC 机控制界面直接查看和修改),则系统等待10分钟(该值可以通过PC 机控制界面直接查看和修改)之后再继续采集、判断。
当采集到的光强大于系统设定值,则程序往下运行。
系统根据读取的时钟时间和上次存放在系统RAM 中的相应值进行比较,以判断是否超过6分钟(该值可以通过PC 机控制界面直接查看和・23・云南师范大学学报(自然科学版)第26卷 修改),如果是,将这个时间存放到系统中,更新原来的相应数值。
系统按照程序计算当时的太阳高度角,通过和传感器采集得到的实际高度角进行比较,根据得到的差值的正负来判断步进电机的转动方向,根据数值大小和传动系统的传动比,计算出高度角步进电机所需的脉冲数。