高速铁路CPⅢ三角高程网构网与平差计算方法
高铁CPⅢ复测高程和相邻点高差较差限差的确定

高铁CPⅢ复测高程和相邻点高差较差限差的确定
徐小左
【期刊名称】《铁道工程学报》
【年(卷),期】2010(000)010
【摘要】研究目的:CPⅢ高程网对保证高速铁路无砟轨道高程方向上的静态平顺度具有至关重要的作用.为了确保其测量结果的可靠性,常需进行复测,而目前高铁CPⅢ复测高程和相邻点的高差较差限差一般是基于大量的统计数据给出的,并非经过严密的理论推导.因此,研究CPⅢ复测高程和相邻点高差较差的严密估算原理,对保证在建高铁CPⅢ高程网的建网、复测成果的可靠性具有重要的意义.研究结论:按间接平差原理推导了CPⅢ高程网复测高程和相邻点高差较差限差的严密估算模型.并依据该模型,对按德国中视法和中国矩形法施测的CPⅢ高程模拟网进行了仿真计算,其结果与现有高速铁路工程测量规范关于CPⅢ高程网复测高程和相邻点高差较差限差的规定相吻合,为高速铁路工程测量规范有关CPⅢ高程网复测高程和相邻点高差较差限差的规定提供了理论支撑.
【总页数】4页(P45-48)
【作者】徐小左
【作者单位】中铁第一勘察设计院集团有限公司,西安,710043
【正文语种】中文
【中图分类】U212.24
【相关文献】
1.CPⅢ高程网复测稳定性分析方法研究 [J], 刘成龙;刘竹均;杨雪峰;刘志
2.基于多限差的高铁CPI控制网复测稳定性分析新方法研究 [J], 刘志;刘成龙;曹成度;赖鸿斌
3.光电三角高程往返测高差不符值限差探讨 [J], 孟庆云
4.关于《架空进电线路测量技术规定》中高差较差的限差分析 [J], 李忠峰
5.运营高铁CPⅡ复测成果异常分析及修正方法研究 [J], 刘锡钖;王胜;郑旭东;李浩标;陈铮;张献州
因版权原因,仅展示原文概要,查看原文内容请购买。
高速铁道工程技术《知识点四 CPⅢ测量与数据处理》
知识点四 CPⅢ测量与数据处理
〔一〕CPⅢ平面控制网的测量网形与联测方法
• Ⅲ平面网观测时采用全站仪自由设站的方法,因此不存在仪器 对中误差,测站点均匀分布在线路中线附近;
• Ⅲ点采用特殊的强制固定装置,保证了目标点重复安装的精度, 也最大程度消减了棱镜安装时的对中误差;
• 6 Cm; • 8 CPⅢ平面网的观测必须是自动观测,测量仪器必须是测量机
图5:返测水准路线示意图
沪昆铁路客运专线浙江有限责任公司
水准路线中所有CPⅢ点间的水准路 线长度也根本相等。线路采用独立往 返观测的方式对水准线路进行检核, 保证了CPⅢ水准测量的正确性
CPⅢ高程控制网平差方法采用间接
知识点四 CPⅢ测量与数据处理
〔三〕CPⅢ平面控制网平差方法
• 平差处理过程中不降低CPⅢ网的实际观测精度,保证轨道 施工铺轨的平顺性。平差主要有以下三种计算模型:自由 网平差与校正、传统的约束网平差计算和CPⅢ网置平算法。
• CPⅢ网置平算法:在CPⅢ网及其自由网平差时,可以把 CPⅢ网视为一个二维的平面刚体,而作为CPⅢ网沿线控 制基准也可视为一个二维的平面刚体,这两个二维的平面 刚体如何匹配的最好,就是CPⅢ网的置平平差算法需要解 决的问题。该算法的实质就是在不改变CPⅢ网网形刚体及 其精度和不改变CPⅢ控制基准网网形刚体及其精度的前提 下,通过坐标转换实现CPⅢ自由网与CPⅠ、CPⅡ网的最 优匹配。
CPⅢ高程网测量方法及其数据处理

CPⅢ高程网测量方法及其数据处理摘要简单介绍铁路客运专线建设CPⅢ高程控制网测量及平差方法关键词CPⅢ高程控制网测量德国中视法观测平差方法1 前言目前国内铁路客运专线建设中CPⅢ高程控制网测量方法主要包括德国中视法、中国矩形法和三角高程法。
德国中视法是一种水准测量方法,其特点是测量精度高,测量原理及方法明晰,本文就德国中视法测量方法及数据平差处理做具体介绍。
2测量方法德国中视法采用水准测量往返观测的方法进行,往测时以线路一侧(图2-1下方)的CPⅢ点为主线进行水准测量,而另一侧的CPⅢ点(图2-1上方)在进行水准测量时作为中视进行观测,其往测水准路线如图2-1所示。
返测时以另一侧的CPⅢ点为主线进行水准测量,而对侧的CPⅢ点在进行水准测量时也是作为中视进行观测,返测水准路线如图2-2所示。
CPⅢ点与线路水准基点每两公里应联测一次,联测线路水准基点时也应按照往返测的方法进行。
从图2-1和图2-2中可以看出,任何一段CPⅢ高程网均由两条附合路线组成,这两条附合路线均起闭于CPⅢ高程网线路两端的二等水准基点上。
图2-1 德国中视法往测路线示意图图2-2 德国中视法返测路线示意图3数据处理采用电子水准仪(天宝DINI12)完成一测段德国中视法测量后获得如图3-1a和图3-1b的数据。
其中Rb为后视,Rf为前视,HD为视距,Z为高程。
完成往返测量后,构成如图3-2的高差闭合环。
图3-1a 测量高程控制点与CPⅢ控制点高差观测数据图3-1b 第一测站和第二测站数据图3-2 德国中视法高差闭合环示意图3.1 平差方法经典平差方法包括:条件平差、间接平差、附有参数的条件平差、附有限制条件的间接平差和附有限制条件的条件平差五种平差方法。
基于德国中视法的高差闭合环网形和利于计算机处理,德国中视法平差模型选择间接平差模型。
选取待定点的高程作为未知参数,搜索闭合环网形中与已知点发生联系的待定点,计算出此待定点的高程值并将其作为新的已知点,循环搜索直到所有待定点的高程都被解算出来,从而完成所有待定点近似高程的推算。
如何进行高程网平差计算

如何进行高程网平差计算在土地测量、工程建设以及地形地貌研究等领域,高程网平差计算是一项重要的技术手段。
它可以通过对给定高程测量数据进行处理,得到地表上不同点的准确高程数值。
本文将介绍高程网平差计算的基本原理、计算步骤以及常见的处理方法。
一、高程网平差计算的基本原理高程网平差计算是基于高程测量的数学模型和统计原理进行的。
其基本原理是将地表上的若干测量点按照一定的规则和约束条件连接起来,形成一个连续的三角网,然后利用观测数据之间的差异来求解各个测量点的准确高程值。
二、高程网平差计算的步骤1. 建立高程网:首先,从实际测量数据中选取一部分具有代表性的点,这些点应覆盖整个测量区域。
然后,根据这些点之间的距离和角度关系,建立起一个完备的三角网。
2. 录入观测数据:在建立好高程网之后,需要将实际观测得到的数据录入计算机中进行处理。
观测数据包括各个测点的坐标值、高程差以及精度等信息。
3. 构建观测方程:根据高程网的结构和观测数据,可以建立一系列观测方程。
观测方程描述了一系列点之间的几何关系,并将其与观测数据进行关联。
4. 解算观测方程:通过解算观测方程,即求解一系列未知数(各个测点的准确高程)的数值解。
这一步需要运用数学和计算机技术,进行迭代和优化计算,以求得最优解。
5. 进行检查和验证:解算出高程值之后,需要进行数据检查和验证。
可以通过计算观测值与计算值之间的差异,来评估解算结果的精度和可靠性。
三、常见的处理方法1. 最小二乘法:最小二乘法是一种常见的处理方法,通过最小化观测方程中的残差平方和,来优化测点的高程值。
这种方法适用于误差服从正态分布的情况。
2. 点高程带权平均法:该方法通过对不同点的测量精度进行加权,来进行平均。
测量精度越高的点,所占权重越大,从而提高了解算结果的准确性。
3. 权衰减法:在高程测量中,近处点的观测精度通常高于远处点。
权衰减法通过给不同距离的点赋予不同的权重,来体现这种测量精度的差异。
京沪高速铁路轨道控制网高程测量

6)CPIII三角高程网含有自身的闭合高程路线和与线路水准 基点构成的符合高程路线,闭合和符合高程路线的高差闭合差、 每公里高差测量的偶然中误差以及全中误差,应该满足精密水准 测量的相应限差要求。
17量应满足下表的主要技术要求。采用该方 法传递高程时,前后视必须使用同一个棱镜,且观测过程必须确保棱 镜高度不变。仪器到棱镜的距离宜小于100m。仪器到前视棱镜和后视 棱镜的距离应尽量相等,一般差值不宜超过5m。观测时,应测量温度、 气压值,并进行边长改正。
26
五、CPⅡ加密高程测量及高程引上桥的方法
CPⅢ控制点水准测量应按《客运专线无碴轨道铁路工程 测量技术暂行规定》中的“精密水准”测量的要求施测。 CPⅢ控制点高程测量工作应在CPⅢ平面测量完成后进行, 并起闭于二等水准基点,且一个测段联测不应少于三个水准 点。
精密水准测量采用满足精度要求的电子水准仪(电子水 准仪每千米水准测量高差中误差为±0.3mm),配套因瓦尺。 使用仪器设备应在鉴定期内,有效期最多为一年,每年必须 对测量仪器精确度进行一次校准,每天使用该仪器之前,根 据自带的软件对仪器进行检验和校准。
19
三、轨道控制网CPIII高程测量
(2)单侧贯通往返水准测量法
往测水准路线如下图1所示:
20
三、轨道控制网CPIII高程测量
(2)单侧贯通往返水准测量法
返测水准路线如下图2所示:
21
三、轨道控制网CPIII高程测量
(3)闭合环水准测量法
CPⅢ点与CPⅢ点之间的水准路线,采用下图3所示的水准 路线形式进行。
(二)、连续梁等特殊结构的CPⅢ控制网高程测量
CPⅢ网的平面与高程数据处理
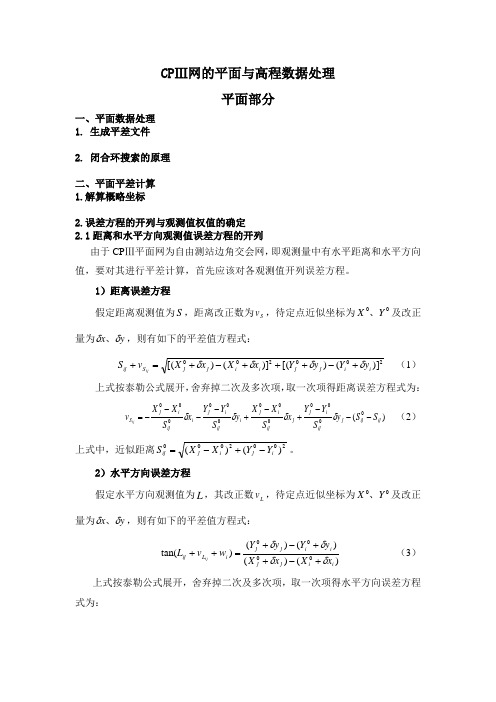
CP Ⅲ网的平面与高程数据处理平面部分一、平面数据处理 1. 生成平差文件2. 闭合环搜索的原理二、平面平差计算 1.解算概略坐标2.误差方程的开列与观测值权值的确定2.1距离和水平方向观测值误差方程的开列由于CP Ⅲ平面网为自由测站边角交会网,即观测量中有水平距离和水平方向值,要对其进行平差计算,首先应该对各观测值开列误差方程。
1)距离误差方程假定距离观测值为S ,距离改正数为S v ,待定点近似坐标为00Y X 、及改正量为y x δδ、,则有如下的平差值方程式:200200)]()[()]()[(ii j j i i j j S ij y Y y Y x X x X v S ij δδδδ+-+++-+=+ (1) 上式按泰勒公式展开,舍弃掉二次及多次项,取一次项得距离误差方程式为:)(00000000000ij ij j iji j j ijij i iji j i ijij S S S y SY Y x SX X y SY Y x SX X v ij ---+-+----=δδδδ (2)上式中,近似距离2002000)()(i j i j ij Y Y X X S -+-=。
2)水平方向误差方程假定水平方向观测值为L ,其改正数L v ,待定点近似坐标为00Y X 、及改正量为y x δδ、,则有如下的平差值方程式:)()()()()tan(0000i ij ji i j j i L ij x X x X y Y y Y w v L ij δδδδ+-++-+=++ (3)上式按泰勒公式展开,舍弃掉二次及多次项,取一次项得水平方向误差方程式为:000000000202020200""""[()]ij j i j ij i j i L i i j jijijijiji ij ij i Y Y X X Y Y Y Y v x y x y SSSSw T L w ρδρδρδρδδ----=--+---+ (4)上式中:ρ=206265″,00000arctanij i j ij X X Y Y T --=。
一种新的CPⅢ三角高程测量数据处理方法研究
一种新的CPⅢ三角高程测量数据处理方法研究杨云洋【摘要】针对CPⅢ三角高程数据处理方法提出高差差分选择、闭合环检验、不同站高差定权原则及具体解决方案,并编制了CPⅢ三角高程数据处理软件。
通过与水准测量数据对比分析,精度满足要求。
【期刊名称】《铁道勘察》【年(卷),期】2016(042)003【总页数】3页(P1-2,3)【关键词】三角高程;CPⅢ高程;差分;平差计算【作者】杨云洋【作者单位】铁道第三勘察设计院集团有限公司,天津 300142【正文语种】中文【中图分类】P209;P224.2高铁轨道控制网CPⅢ布设于线路的左右两侧,沿线路方向约60 m布设一对,为调整轨道平顺性提供平面与高程基准。
目前,CPⅢ平面测量采用高精度全站仪进行多测回距离、角度测量,高程测量采用精密水准测量。
CPⅢ要求2~3年复测一次,因此CPⅢ平面和高程测量是一项非常繁重的工作。
研究一种高精度CPⅢ三角高程数据解算方法,其解算结果和传统方法相比,精度有一个质的提高。
CPⅢ平面测量采用自由测站的方式进行测量,每站测量6对CPⅢ点,每站测量完毕,向前移动2对CPⅢ点,这样可保证每个CPⅢ点至少被测量3次,如图1所示。
CPⅢ高程测量一般采用精密水准四边环的形式测量,采用后前前后、前后后前的模式测完一个四边环后,然后再测下一个四边环,如图2所示。
如采用三角高程测量方法,则平面测量和高程测量可同时完成,提高作业效率,并满足《高速铁路工程测量规范》中有关技术作业的要求。
影响三角高程精度的主要因素为大气折光和仪器的系统误差(视准轴误差等),距离越长其影响量越大,通过差分方式将这些影响量消除,将大大提高数据的可靠性与精度。
本方法的核心思想是将测站点至各目标点的高差经过差分处理,由自由测站的测站点至目标点的高差模式转换为各目标点间高差的四边环模式,如图3所示。
如图3所示,点P1、P2为位于线路左右两侧的一对CPⅢ点,P1、P2基本位于同一水平面上,同一测站中两点观测时间大至相同,设站点A测量P1,P2时受到大气折光、仪器的系统误差以及其他因素的影响基本相同,通过式(1)差分处理,抵消相同的影响因素,可得到P1、P2间较高精度的高差值。
高速铁路轨道控制网CPⅢ平面测量技术探讨
摘要:本文通过CPⅢ轨道控制网测量之前的工作准备、CPⅢ控制点的布设、测量仪器的要求、CPⅢ平面测量精度、CPⅢ轨道控制网网型要求、CPⅢ轨道控制网平面测量方法及数据处理等方面介绍了CPⅢ控制网平面测量的技术特点、技术要求和测量方法。
关键词:高速铁路精密控制网CPⅢ平面测量在我国经济飞速发展的今天,高速铁路已经蔓延向全国东南西北,人们对于快速出行和舒适安全的要求也十分关注。
列车快速行驶的过程中旅客乘坐舒适度以及安全性的高低,已经是用来进行铁轨平顺度衡量的一个非常重要的指标,而轨道控制网CPⅢ测量为无砟轨道铺设的高平顺性起着至关重要的作用。
轨道控制网CPⅢ是一个沿着轨道线路两侧布设的三维控制网,起闭于基础平面控制网(CPⅠ)或线路控制网(CPⅡ),一般在线下工程施工完成后进行施测,为轨道施工和运营维护的基准。
高速铁路工程测量的平面、高程控制网,按施测阶段、施测目的及功能可分为勘测控制网、施工控制网、运营控制网。
为了保证勘测、施工、运营维护各阶段平面测量成果的一致性,应该做到三网合一。
为了保证轨道控制网CPⅢ测量的可靠性和准确性,在进行轨道控制网CPⅢ正式测量之前,应采用水准仪和GPS全球定位系统对管段内二等水准网、CPⅠ以及CPⅡ控制网进行全面复测,并采用复测合格的精测网对破坏的点重新布设和测量,并上报设计院批复。
按照设计要求,对于距离超过1km的CPⅡ需按同精度内插方式进行加密。
在进行轨道控制网CPⅢ外业测量的时候,测量的难度是比较大的,需克服各种外界观测条件的阻碍,其测量精度为每个控制点与相邻5个控制点的相对点位中误差均要求小于1mm。
轨道控制网CPⅢ平面测量采用自由设站边角交会的测量方法,这是一种比较新的测量技术,在具体的测量过程中,由于测量点的数量很多,测量的工作任务量是非常大的,而且要求的技术精度比较高,如阳光、灰尘、棱镜松动、对中基座偏差、热源、冻霜、遮挡、震动等因素均会对其测量精度产生影响,故适宜在夜间或阴天干扰因素较小的良好测量环境下进行测量,做好每一个细节的检查是确保CPⅢ平面测量数据合格的基本条件。
高速铁路CPⅢ控制网测量培训教材
高速铁路CPⅢ控制网测量与数据处理培训教材西南交通大学2009年6月目 录第1章 CPⅢ控制网测量与数据处理的基础知识 (1)1.1概念或术语 (1)1.2CPⅢ控制网的网形 (2)1.2.1 平面控制网测量网形 (2)1.2.2 高程控制网测量网形 (3)1.3CPⅢ控制网的特点 (4)1.4CPⅢ控制网测量的一般规定 (5)1.5CPⅢ平面控制测量要求 (8)1.6CPⅢ高程控制测量要求 (11)第2章 CPⅢ数据采集软件(DMS)安装与使用说明 (16)2.1CPⅢDMS的安装 (16)2.1.1 软件安装需求 (16)2.1.2 软件安装步骤 (16)2.2CPⅢDMS功能和适用范围 (20)2.3硬件设备 (21)2.4CPⅢDMS使用说明 (21)2.4.1 CPⅢ DMS测量准备 (21)2.4.2 CPⅢ DMS测量实施 (23)2.5CPⅢDMS文件说明 (31)2.5.1 观测参数文件 (31)2.5.2 通信参数文件 (31)2.5.3 测量成果文件 (32)第3章 CPⅢ数据处理软件(DAS)安装与使用说明 (33)3.1CPⅢDAS的安装 (33)3.1.1 CPⅢ DAS的安装需求 (33)3.1.2 CPⅢ DAS的安装步骤 (33)3.2CPⅢDAS功能和适用范围 (34)3.3硬件设备 (35)3.4CPⅢDAS使用说明 (35)3.4.1 “工程项目”菜单 (35)3.4.2 “平面数据处理”菜单 (37)3.4.3 “平面平差计算”菜单 (42)3.4.4 “高程数据处理”菜单 (47)3.4.5 “高程数据平差”菜单 (49)3.4.6 “结果显示”菜单 (52)3.5CPⅢDAS文件说明 (53)3.5.1 工程文件 (53)3.5.2 平面数据处理 (53)3.5.3 平面平差计算 (53)3.5.4 高程数据处理 (53)3.5.5 图形文件 (53)第4章 典型CPⅢ网测量与数据处理结果分析与对策 (54)4.1CPⅢ网测量误差来源 (54)4.2CPⅢ网测量过程的问题及对策 (54)4.2.1 测站超限频繁 (54)4.2.2 目标错误寻找 (54)4.3CPⅢ网数据处理结果分析与对策 (54)4.3.1 平面网数据处理结果分析与对策 (54)4.3.2 高程网数据处理结果分析与对策 (57)第1章 CPⅢ控制网测量与数据处理的基础知识1.1 概念或术语1)工程独立坐标系:为满足铁路工程建设要求采用的以任意中央子午线和高程投影面进行投影而建立的平面直角坐标系。
高速铁路CPⅢ控制网测量关键技术
高速铁路CPⅢ控制网测量关键技术[摘要]:系统的阐述了高速铁路CPⅢ控制网测量的关键技术,并对每道作业流程的注意事项及相关要求作了详尽的说明,对高速铁路CPⅢ控制网的测量控制工作有着极强的指导和借鉴作用。
[关键词]:高速铁路 CPⅢ控制网测量关键技术1.概述高速铁路轨道控制网(CPⅢ)是沿线路布设的平面、高程控制网,平面起闭于基础平面控制网(CP Ⅰ)或线路平面控制网(CPⅡ)、高程起闭于线路水准基点,一般在线下工程施工完成后进行施测,是轨道铺设和运营维护的基准。
CPⅢ控制网由施工单位在施工过程中建网测量,工程竣工后移交给运营单位用于运营期间轨道维护测量,具有相对精度高、点位分布密集、测量工作量大、使用周期长等特点。
2.CPⅢ控制网测量作业2.1 CPⅢ精密控制网测量作业流程测量准备 CPⅢ网标志布设 CPⅢ网加密 CPⅢ网测量 CPⅢ网数据处理及评估 CPⅢ网复测。
2.2 CPⅢ测量准备工作1)测量单位必须具有乙级及以上测绘资质和CPⅢ控制网测量经验,作业人员须持有国家测绘部门颁发的测绘作业证且具有无砟轨道CPⅢ施测经历或通过专业的CPⅢ数据采集及平差数据处理培训。
2)CPⅡ加密与线路水准基点的加密测量,以及CPⅢ网测量所采用的测量仪器设备须满足《高速铁路工程测量规范》中要求的仪器精度指标,经过正规仪器检定部门的检定并在有效时间内,作业前和作业期间进行必要的检校。
3)CPⅢ的控制网测设应在无砟轨道铺设条件评估通过后进行。
4)按铁道部建设司《时速200公里及以上铁路工程基桩控制网(CPⅢ)测量管理办法》(铁建设【2008】80号)和《高速铁路工程测量规范》(TB10601-2009)要求,CPⅢ建网前应对精测网进行全面复测。
5)为了高效、准确地建立CPⅢ基桩网,一般情况下要加密CPⅡ网。
CPⅡ加密的主要目地是为了方便CPⅢ基桩网的观测,以及弥补被损毁的和无法利用的CPⅡ点。
在路基、桥梁地段CPⅡ加密可采用GPS 接收机测量在原精密平面控制网基础上按同精度扩展方式加密;隧道内CPⅡ控制点应在隧道贯通后采用导线测量方法测设。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为克 服高 速铁路 C 1控 制 网将平 面 和高 程数 P1 I
据分开测量的不足 , 高高速铁路 C 1控制 网的 提 P1 I 建 网效率 , 保证 达 到高精 度要 求 , 文 在 C I 并 本 PI平 I
平 差计 算原 理 , 建立 了平差计 算 和精度 评定 的数 并
学 模 型 , 后 , 绍 根 据 该 数 学 模 型 开 发 的 实 用 最 介
C 1三角 高程 网平 差计算 软 件. P1 I
间距 约为 l 2 精度 要 求很 高 , 面 网要 求 相 0~ 0m; 平
邻点 的相 对 点 位 中误 差 不 大 于 -1mm , 程 网 4 j高 -
o sna os sb i ,ad teprm t dut e t eh di ue oo ti teacrt e v t n be Tl ,i ul n aa ee ajs n m to s sd t ba h cua l a o tn t h r m n e e i
法, 又有 中国的矩形 法 .
站 到 C Ⅲ点 的水 平方 向值 、 P 斜距 和竖 直 角. 采用 自
由测 站观 测 , 没有 仪 器 对 中的 问题 , 镜 中心就 是 棱 C Ⅲ三维控 制 点 的 点 位 , 有 目标 对 中和 棱 镜 高 P 没 度 问题 . 样 , 据 自由测站 到 C H点 的斜距 和竖 这 根 PI 直角 , 就可 以计算 测 站到 C Ⅲ点 的三角 高差 . P 一个 C 1平 面 网测 站 一般观 测 1 P1 I 2个 C I点 , 个 自 PI 由单 I 由测站观 测值 形 成 的 三 角 高差 情 况 , 图 1 示. 如 所
po oe r p s d,wh c s p ro me smu t n o sy d i g e tb ih n h o io t lc n r ln t r . I ih wa e f r d i la e u l urn sa ls i g t e h rz n a o to ewo k n
Ke o d : C I tgn m tc e e n e ok yw rs PI r o o er l l g n t r ;ma e ai l m dl dut n aclt n i i vi w t m t a o e;ajs h c met cl a o ; u i
a c r c v l to c u a y e auain
1 c m 三 角 高 程 网 几何 模 型 P
C PⅢ三 角 高程 网 是 在 C 1 面 网 的基 础 上 P1平 I
建立 的. P1平 面 网 是 采 用 智 能 型 全 站 仪 自动观 C 1 I 测 的 自由测 站边 角交 会控 制 网 , 其观 测值是 自由测
要求相 邻点 的高 差 中误 差 不 大 于 ±0 5m 高 程 . m,
2 C i a w yEya nier gG opC .Ld , hn d 10 1 C i ) . hn R i a runE gnei ru o t. C egu6 0 3 , hn a l n a
A b t a t I o d r o sa ls CPII e t a c nr l ewo k n s r c : n r e t e t b ih I v ri l o to n t r i hih s e r iwa wi h g c g —pe d al y t h ih ef in y a d a c r c f c e c n c u a y,a CPIItio o ti e ei g n t r t o a e n d f r n em eh d wa i I rg n merc lv ln ewo k me h d b s d o if e c t o s e
( .西南交通大学地球科学 与环境工 程学 院 ,四川 1 I成都 60 3 ; .中铁二 院工程集 团有 限责任 公 司 ,四J 10 1 2
成都 603 ) 1 1
摘
要 :为提高高速铁路 C m高程控制 网的建 网效率和精度 , 出采用与平面控 制网同步测 量 、 P 提 基于差 分法 构
建 c n三角高程 网的建 网新方法. Pi 这种方法根据间接高差与直接 观测 量的误差传播关 系进行定权 , 依据观测 值
及其权重建立数学模型 , 通过问接平差方法计算精确 的 c m控制 点高程. P 基于该算法开发 了相应的数据处理 软 件, 并将软件用 于实例分析. 结果表 明, 该方 法求得 的高程与水准高程的高程较差落入 [ l3i 区间的概 一3mi, n] l n
L U C ego g , Y N u eg , L in ag , H o I hn l n A GX e n f UJa k n EB ‘
( .S h o o G oc n e n n i n e t n ier g o t et i t g U i ri ,C e g u6 0 3 ,C i ; 1 c o l f es i c sa d E v o m n l g ei ,S uh s J o n n es y h n d 1 0 1 hn e r aE n n w ao v t a
Jn 0 1 u .2 1
文 章 编 号 : 2 822 ( 0 1 0 -44 3 0 5 —74 2 1 )30 3 4 7
。__.
同 速 铁 路 C 角 高 程 网 Pm三 构 网与 平 差计 算 方 法
I. _一 Cj
刘成 龙 , 杨 雪 峰 卢 建 康 何 波。 , ,
第4 6卷 第 3期 2 1 年 6月 01
西
南
交
通
大
学
学
报
Vo . 6 No 3 14 .
J URN F S UT O AL O O HW E T JAO ONG UNI RST S I T VE I Y D : 0 36 /. s.2 82 2 .0 10 . 1 OI 1 .9 9ji n0 5 — 4 2 1 .30 3 s 7
收稿 臼期 : 00 1-2 2 1.20 基 金项 目 :铁 道部 科 技 项 目 ( 建科 字 2 0 . ) 铁 0 91 6 作者 简 介 :刘 成龙 (9 2一) 男 , 授 , 士 , 究 方 向 为 精 密工 程 测 量 , - i: l y i.iacr 16 , 教 硕 研 Ema lz @vp s .o l cw n n
v l e f CPII o to p i t. Th n, a o u i g ot r b s d n h p o o e ag rt au so I c n r l o n s e c mp tn s fwa e a e o t e r p s d l o i hm wa s d v l p d a d e td n e l p lc t n. T ts r s l s o ta t d rv d eg t r m t e e eo e n tse i r a a p iai o he e t e u t h ws h t he e ie h ih fo h po oe to r p s d meh d, c mpae t h lv ln h i h a h s me on , h s o fd n e e e o o r d wi t e e ei g eg t t t e a p i t h a a c n e c lv l f i 9 4 9. 0% f r t lr n e n e a o 一 3 o 3 o oe a c i tr l f v t mm . Thee o e, usn h CPII rg n merc e ei g r fr ig t e I tio o ti lv l n
网测量应 达 到 二 等水 准 测 量 精 度 等 级 的要 求 ; C PⅢ高程 网虽与 C I 面 网共 点 , 采 用 不 同 的 PI平 I 但
测量 标志 , 分别进 行 平 面 网和 高 程 网 的 测量 ; 统 传
的 C I高 程 网测量 , 是 采用 电子 水 准 仪 按 照 特 PI I 都 定 的观 测程 序 和路 线 进 行 测 量 , 有 德 国 的 中 视 既
C n tu t n a dAdu t n to o o sr ci n j s o me tMeh d fr
cP Trg no erc Le ei g Ne wo k o ih- pe d Ra l y m i o m ti v ln t r fH g S e iwa
率 为 9 .0 , 该 方 法 构 建 的 C I三 角高 程 网代 替 C m水 准 网仍 然 可满 足 c l高 程 网的 精 度 要 求 . 94% 用 PI I P Pl i
关键词 :c m三角高程网 ; P 数学模型 ; 平差计算 ; 精度评定
中 图分 类 号 : 24 2 P 2 . 文献标志码 : A
面控 制 网 自由测站 观测 的基 础上 , 出采 用 同步 观 提
测 的平 面 网数 据进 行 C 1 三角 高程 网数 据处 理 的 P1 I 新思路 . 理论 分析 和实 践 验证 表 明 , Pm三角 高 程 C
第 3期
刘成 龙 等 : 高速铁路 C Ⅲ三) 一般 在 线 下工 程 施 工完 成 后 布 设 和施 ,
测.P c Ⅲ控 制 网 的 主 要 特 点 是 : 制 点 数 量 多 , 控 沿线路 方 向每 隔 6 左 右 布 设 一对 , 0m 点对 的横 向
t s hi me h d, a to m ah m aia mo e o o s r a in q ai n wih we g t d v l e t e tc l d l f b e v t e u to s o t ih e a u s, wh c a e ih r