光栅尺零点设定文档
FANUC系统中绝对式光栅尺的设定方法

‐‐参数 1815#6,1815#0,1817#3,1868,2275#1,2394
2. 使用带参考标机的光栅尺、或带有绝对地址原点的光栅尺(全
闭环系统)时,将参数值设定为 1
#6
置 1,第一个光栅尺模块予以使用
#3
伺服电机参数:置 1 使用分离型位置
检测器
#0
分离型位置检测器的信号反转
位置脉冲数:电机编码器旋转一圈,
光栅尺所反馈的脉冲数
柔性进给齿轮(分子)
设置柔性齿轮比
柔性进给齿轮(分母)
位置脉冲变换系数
如果位置脉冲超过 32767,需设置脉冲转换系数
指令倍乘比 CMR
三、 光栅尺时伺服参数设定 1. 1815#1 设定为 1,开启全闭环; 2. 设定电机代码(已设置,无需更改) 3. AMR 设定,因为电机使用 AIS 电机,故设定为 000000000 4. 指令倍乘比设定为 2
Y轴位置反馈脉冲= 8mm 160000 0.00005mm
Z轴位置反馈脉冲= 10mm 200000 0.00005mm
因为此时脉冲数超过 32767,故需设置 2185 脉冲转换系数 10,No.2024 可设置为 16000,16000,20000
一、 设计参数
X 轴光栅尺
[FAGOR]SAF50-270-5-A Y 轴光栅尺 [FAGOR]SAF50-170-5-A Z 轴光栅尺 [FAGOR]SAF50-720-5-A
Hale Waihona Puke FANUC 系统中 FAGOR 光栅尺的参数设定方法 (绝对式光栅尺)
二、 相关参数说明
相关参数
参数功能
1005
#1 置 1 无挡块参考点设定有效
光栅尺调试

光栅尺调试增加第二测量回路及增加光栅尺功能1.PLC 程序修改DB3x.DB1.5=0, DB3x.DB1.6=1 2.机床数据MD30200=2N30200 $MA_NUM_ENCS[AX1]=2N30240 $MA_ENC_TYPE[1,AX1]=1N31000 $MA_ENC_IS_LINEAR[1,AX1]=1N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.02N31040 $MA_ENC_IS_DIRECT[1,AX1]=1N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=500如果为带距离编码的光栅尺:3.PLC 程序修改DB3x.DB1.5=0, DB3x.DB1.6=1 4.机床数据MD30200=2N30200 $MA_NUM_ENCS[AX1]=2N30240 $MA_ENC_TYPE[1,AX1]=1N31000 $MA_ENC_IS_LINEAR[1,AX1]=1N31040 $MA_ENC_IS_DIRECT[1,AX1]=1N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1MD34200 ENC_REFP_MODE=3N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.04 ; MD34310 ENC_MARKER_INC =0.04MD 34300 ENC_REFP_DIST=80N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=80MD34320 ENC_INVERS[1] ;=0 光栅尺与机床同方向MD34000 REFP_CAM_IS_ACTIVE =0绝对光栅尺:5.机床数据MD30200=2N30200 $MA_NUM_ENCS[AX1]=2N30240 $MA_ENC_TYPE[1,AX1]=4N31000 $MA_ENC_IS_LINEAR[1,AX1]=1N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.02 型号来定N31040 $MA_ENC_IS_DIRECT[1,AX1]=1N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=500MD34200 ENC_REFP_MODE=0MD34102 REF_SYNC-ENC=1MD1030=18H标定的步骤:和802D 一样第二测量回路生效第二测量回路生效光栅尺分辩率;两个零脉冲之间的差值:两个零脉冲之间的距离;找参考点的最大距离=1 光栅尺与机床反方向// 根据光栅尺的如果是光栅回零的话,请参考以下以下方法:如果你的光栅尺是带距离编码参考点标志的光栅尺的话(一般海德汉光栅尺后面带C标志的都有此功能),回参考点就不需要回零开关,参数设定如下:1、34200=3光栅尺使用类型2、34300[1]=20mm 直线光栅尺标准参考点标志栅格间距(LS486C为20mm)3、34060[1]=40返回参考点最大移动距离=2倍直线光栅尺标准参考点标志栅格间距4、34000=0不使用进给轴返回参考点凸轮,即不用返回参考点减速开关信号(DB31.DBX12.7)5、34090=XXX返回参考点偏移值6、34310[1]=0.020 光栅尺信号节距(LS486C 为0.020mm)希望对你有参考价值!2.进入“手动”方式,将坐标移动到一牛已知位的置设置,激活机床参数:按机床控制面板上的复位键,可激活的以上设定的参数7.按照返冋参考点的方向按方向阻无坐杯移动.但系统口动设定「卜列:屏幕上的显示位宙为设定的位置。
802dsl配置绝对值光栅尺
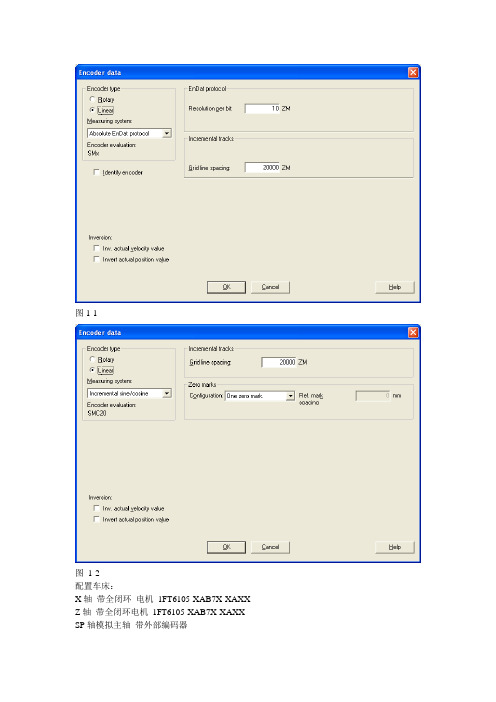
图1-2
配置车床:
X轴带全闭环电机1FT6105-XAB7X-XAXX
Z轴带全闭环电机1FT6105-XAB7X-XAXX
SP轴模拟主轴带外部编码器
驱动部分:6SL3130-7TE21-6AXX ACTIVE电源模块
6SL3120-2TE21-8AXX双轴电机模块
5个编码器通过5个SMC20进行信号转换
看实际情况
30240
1
4
1
图1-3
问题:在配置Z轴光栅的时候,光栅尺到SMC20的连线有问题,需要将5V电源和信号检测的电源在光栅尺一头并联,以及0V和信号检测的PM。
参数设定:
X
Z
SP
30110
1
2
3
30220
1
2
1
30230
2
2
1
31000
1
1
0
31010
0.02
0.0231020源自1024310401
1
1
32110
看实际情况
看实际情况
拓扑结构:如图1-3
ACTIV模块的202接模拟主轴的外部编码器
电机模块的X201 X轴电机编码器
X202 X轴光栅尺LC183增量如图1-2设置
X203 Z轴电机编码器
CU_ X2 Z轴光栅尺LC143 Endat绝对值如图1-1设置:分辨率是0.01um
光栅栅距是20um
配置过程:
XZ轴都是全闭环,所以模拟主轴的编码器要叠加在X或Z轴,那么就牵扯到第三编码器的设置,关于编码器的设置可以参看file:///M:\工程师文章\个人总结\802DSL\802D%20sl第三编码器的调试.pdf
ST700三丰光栅尺原点设定流程
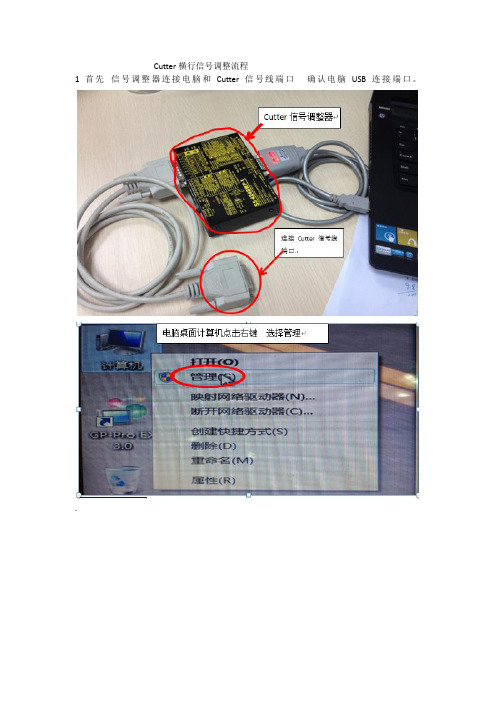
Cutter横行信号调整流程
1首先信号调整器连接电脑和Cutter信号线端口确认电脑USB连接端口。
.
2.打开ST700信号调整程序Serial Port号码输入USB连接端口是COM4那么数值需要减1=(COM3)
3.打开信号Monitor Hold Clear选择ON、然后开始测定、用手推动Cutter横行确认信号的强弱是否保持在60~70左右。
4.信号调整。
开始信号调整时、用手推动Cutter横行走行。
动作开始一直持续到结束。
(在可动的stroke间调整信号。
)
Cutter横行原点设定流程
1.Head的cable正、负方向确认,在磁铁上划出固定位置固定位置数值分别为6mm、
12mm 、18mm等等(它的规律是6的倍数单体機情况下)(设定±0.4mm以内)
6的倍数
6的倍数
2.把Cutter横行CL Unit放在划出的位置对齐选择原点设定
3.位置数据确认
4.历史异常清除
以上调整步骤完了。
距离码光栅尺参数设定及调试说明

距离码光栅尺参数设定说明(1)柔性齿轮比的设定No.2084、No.2085的计算,对于使用模拟信号(1Vpp)输出的光栅尺,柔性齿轮比按照以下的计算方法:目前贵厂在调的轧辊车,X轴使用的光栅尺型号为MOP-42,FAGOR光栅尺说明书如下:X轴光栅尺的信号周期为20um,因此柔性齿轮比(N/M)=20/512/1=20/512=5/128Z轴使用的光栅尺型号为LOP-64,FAGOR光栅尺说明书如下:Z轴光栅尺的信号周期为40um,因此柔性齿轮比(N/M)=40/512/1=40/512=10/128(2)位置脉冲数的计算No.2024 电机每转动1周时,从分离式检测器反馈的脉冲数。
X轴采用丝杠传动,减速比为1/4,丝杠螺距为8mm,电机每转一圈,工作台移动2mm:位置脉冲数=2mm/(20um/512)=51200(>32767),因此采用No.2024和No.2185的乘积设定位置脉冲数。
可进行如下的设定No.2024=25600 No.2185=2。
Z轴采用齿轮齿条传动,减速比为3249/416075,您提供的另一个参数为384.266mm,电机每转动一圈,工作台的移动距离为384.266*(3249/416075)约等于3mm,现在以3mm计算:位置脉冲数=3mm/(40um/512)=38400(>32767),因此采用No.2024和No.2185的乘积设定位置脉冲数。
可进行如下的设定No.2024=19200 No.2185=2。
(3)参考计数器容量的计算No.1821和No.1882的设定:X轴使用的光栅尺型号为MOP-42,FAGOR光栅尺说明书如下:No.1821=20000 No.1882=20020Z轴使用的光栅尺型号为LOP-64,FAGOR光栅尺说明书如下:No.1821=80000 No.1882=80040(4)其他参数的设定No.1815#1=1 使用分离式检测器No.1815#2=1 使用带有绝对寻址标记的标尺(距离码光栅尺)。
光栅尺使用手册

Fagor AutomationLINEAR ENCODERS: "C" ModelREGLAS: Modelo "C" MANUAL CODE:14400159MANUAL VERSION:V0311POSIBILIDADES DE MONTAJE MOUNTING POSSIBILITIESAlinear las caras del transductor, realizando mediciones en los extremos y en el punto central.Align the sides of the scale by indicating the ends and the center.PROCESO DE MONTAJE MOUNTING PROCESSLlevar la máquina a tope mecánico y situar el transductor teniendo en cuenta el curso útil de la misma y el mínimo radio “R” de curvatura que permite el cable.Move the machine to the mechanical stop and place the scale bearing in mind its useful travel and the minimum bending radius “R” of the cable.Soltar el tornillo de fijación que se utiliza para el trans-porte del transductor.Unscrew the shipping protection screw of the scale.Montar el transductor.Mount the scale.Posicionamiento de los relojes comparadores.Positioning of the dial indicators.Posibilidades de fijación.Mounting possibilities.Extraer el soporte de sujeción de la cabeza lectora (colorrojo).Remove the head securing plate (red).Conectar el cable de la cabeza lectora y comprobar quela impedancia existente entre el conector y el transductores inferior a 1 Ohmio.Connect the reader head cable and verify that theimpedance between the connector and the scale is lessthan 1 Ohm.Es conveniente colocar sistemas de protección ante po-sibles caídas de líquidos, materiales, etc.It is recommended to mount some kind of protectioncover as to avoid damage caused by materials or liquidsfalling onto the scale.ENTRADA DE AIREAIR INLET1.Soltar el taco2.Reventar el agujero (está roscaro con metrica M5)3.Amarrar racor de entrada de aire4.Volver a colocar el taco, añadiendo silicona previa-mente.1.Remove the end-cap2.Punch the hole through (already threaded with M5mm)3.Fasten the air inlet.4.Mount the end-cap back by adding silicone first.MECHANICAL CHARACTERISTICS Maximum speed:60 m/min (2362 inch/min)Maximum vibration: 30 m/sec² (3g)Moving force: < 5 N Sealing protection:IP53When using an air inlet: IP64 (DIN 40050)Ambient temperature: 0°C .. 50°C(32°F .. 122°F)Storage temperature: -20°C ..+70°C (-4°F.. 158°F)Relative Humidity:20 ... 80%Weight: 1.2Kg + 2.5Kg/m Scale:20 µm-pitch graduated glass.Cable Length: 3 m. extendable to up to 20m (65ft) withoptional extension cables of 1, 2, 3 and 6m.Cable bending radius: > 75 mm Reference marks:C ModelsOne reference mark in the middle of the measuring length. From there, one every 50mm (2 inches) in both directions. The outer reference mark will be located at the following distance from the ends of the measuring length.10mm (0.4 inch) when the measuring length ends with the number 20.20mm (0.8 inch) when the measuring length ends with the number 40.35mm (1.4 inch) when the measuring length ends with the number 70.CO ModelsSemi-absolute scales where it is possible to know the actual absolute axis position simply by moving it a maximum of 20mm from its current position.CARACTERISTICAS MECANICAS Velocidad máxima:60 m/min Vibración máxima:30 m/seg² (3g)Fuerza de desplazamiento: < 5 N Estanqueidad: IP53Si se utiliza un dispositivo de entrada de aire la estan-queidad es IP64 (DIN 40050)Temperatura ambiente:0 ... 50°CTemperatura almacenamiento -20° ... +70°CHumedad relativa: 20 ... 80%Peso:1,2Kg + 2,5Kg/mEscala: Vidrio de periodo 20 µmLongitud del cable: 3 mts. extendible hasta un máximode 20 mts. mediante alargaderas opcionales de 1, 2,3 y 6 mts.Radio de curvatura del cable: > 75 mm Referencias:Modelos CUna marca de referencia en el centro del curso de me-dición. A partir de esta marca de referencia, una cada 50 mm en ambos sentidos. La última marca en cada uno de los sentidos estará situada a las siguientes distancias de los extremos del curso de medición.10 mm (0.4 pulgadas) si el curso de medición ter-mina con la cifra 20.20 mm (0.8 pulgadas) si el curso de medición ter-mina con la cifra 40.35 mm (1.4 pulgadas) si el curso de medición ter-mina con la cifra 70.Modelos COSon reglas semiabsolutas que permiten conocer la posición real de la máquina con un desplazamiento máximo de 20mm.CT MODELPower supply voltage: +5 V, ±5%, 100 mA.Maximum cable length: 20 m.Output signals:Two pulse trains A and B shifted 90°.CARACTERISTICAS ELECTRICASELECTRICAL CHARACTERISTICSMODELO CTTensión de alimentación:+5 V, ±5%, 100 mA.Longitud de cable permitida: 20 mts. máxima.Señales de salida:Dos trenes de impulsos A y B desfasados 90°.Marker pulse Io:Synchronized with A and B signals.Period T of feedback signals:20 µm.Impulso de referencia Io:Sincronizado con las señales A y B.Periodo T para señales de contaje:20 µm.CARACTERISTICAS ELECTRICASELECTRICAL CHARACTERISTICSImpulso de referencia Io, más su invertida /Io:CX, CY, CW: Sincronizado con las señales A y B.COX, COY, COW: Señal Io codificada.Período T para señales de contaje :Modelo CX, COX = 4 µm Modelo CY, COY = 2 µm Modelo CW, COW = 0.4 µm Período del impulso de referencia Io = T/4Marker pulse Io and their inverted pulse /Io:CX, CY, CW: Synchronized with A and B signals.COX, COY, COW: Coded Io.Period T of feedback signals:CX, COX model = 4 µm CY, COY model = 2 µm CW, COW model = 0.4 µm Period of marker pulse Io:T/4V A = 1V +20%, -40%. pico a pico / peak to peak V B = 1V +20%, -40%. pico a pico / peak to peak V Io = 0.5V ±40%. zona útil / useful zone CP, COP MODELSPower supply voltage: +5 V, ±5%, 100 mA.Maximum cable length:150 m.Output signals:Two voltage modulated sine-wave signals, A and B,shifted 90° and their inverted pulse trains /A, /B.MODELOS CP, COPTensión de alimentación: +5 V, ±5%, 100 mA.Longitud de cable permitida: 150 mts. máxima.Señales de salida:Dos señales senoidales moduladas en tensión A y B desfasadas 90° más sus invertidas /A, /B.Marker pulse Io and their inverted pulse /Io:CP model:Synchronized with A and B signals.COP model:Coded Io Period T of feedback signals: 20 µm.Period of marker pulse Io:3T/4 : TImpulso de referencia Io, más su invertida /Io:Modelo CP:Sincronizado con las señales A y B.Modelo COP:Señal Io codificada Periodo T para señales de contaje: 20 µm.Periodo del impulso de referencia Io: 3T/4 : TV A , V B , & V Io centrados sobre 2,5 V ±0.5V V A , V B , & V Iocentered on 2.5V ±0.5VMODELOS CX, COX, CY, COY, CW, COWTensión de alimentación:+5 V, ±5%, 150 mA.Longitud de cable permitida:*Sin señales diferenciales: 20 mts. máximo *Con señales diferenciales: 50 mts. máximo.Se debe utilizar cable de (8x0.14+2x0.5)mm 2. Con modelos que no sean Fagor la longitud del cable depende de la resistencia terminadora de línea del circuito receptor (Rz).Si Rz 220 Ohmios: 50 mts. máximo Si Rz=100 Ohmios: 25 mts. máximoSeñales de salida:Dos trenes de impulsos A y B desfasados 90°, más sus invertidas /A, /B.CX, COX, CY, COY, CW, COW MODELSPower supply voltage: +5 V, ±5%, 150 mA.Maximum cable length:*20 m maximum without diferential signals.*50 m maximum with diferential signals.A (8x0.14+2x0.5)mm 2 cable must be used.With models other than Fagor its maximum length depends upon the line terminating resistor of the receptor unit (Rz).If Rz 220 Ohms: 50 m. maximum If Rz=100 Ohms: 25 m. maximumOutput signals:Two pulse trains A and B shifted 90° and their inverted pulse trains /A, /B.MODELOS CS,COSTensión de alimentación:±5 V, ±5%, 100 mA. Longitud de cable permitida: 20 mts. máxima.Señales de salida:Dos señales senoidales en tensión A y B desfasadas 90°.CS,COS MODELSPower supply voltage: ±5 V, ±5%, 100 mA.Maximum cable length: 20 m.Output signals:Two voltage modulated sine-wave signals, A and B, shifted 90°.Impulso de referencia Io:Modelo CS:Sincronizado con las señales A y B.Modelo COS:Señal Io codificadaPeriodo T para señales de contaje:20 µm.Marker pulse Io:CS model:Synchronized with A and B signals.COS model:Coded IoPeriod T of feedback signals:20 µm.MODELOS CC, COCTensión de alimentación: +5 V, ±5%, 100 mA. Longitud de cable permitida: 20 mts. máxima.Señales de salida:Dos señales senoidales en intensidad A y B desfasadas 90° más sus invertidas /A, /B.CC, COC MODELSPower supply voltage: +5 V, ±5%, 100 mA.Maximum cable length:20 m.Output signals:Two current modulated sine-wave signals, A and B,shifted 90° and their inverted pulse trains /A, /B.Impulso de referencia Io, más su invertida /Io: Modelo CC:Sincronizado con las señales A y B.Modelo COC:Señal Io codificadaPeriodo T para señales de contaje: 20 µm. Periodo del impulso de referencia Io: 3T/4 : T Marker pulse Io and their inverted pulse/ Io: CC model:Synchronized with A and B signals.COC model:Coded IoPeriod T of feedback signals: 20 µm.Period of marker pulse Io: 3T/4 : TIA= 7:16 µA. pico a pico / peak to peak IB= 7:16 µA. pico a pico / peak to peak IIo= 2:8 µA. zona útil / useful zoneCONECTORES CONEXIONADO CONNECTORS AND CONNECTIONSCIRCULAR-9CIRCULAR-12CIRCULAR-9MALECIRCULAR-12MALESUB-D15MSUB-D15FSUB-D15HD(M)SUB-D15xxSAP-7FEMALESAP-7CONECTORES CONEXIONADO CONNECTORS AND CONNECTIONSV0311 - "C" - Page 11/11DECLARATION OF CONFORMITYManufacturer: Fagor Automation, S. Coop.Barrio de San Andrés s/n, C.P. 20500, Mondragón -Guipúzcoa- (SPAIN)We hereby declare, under our responsibility that the product meets the following directives:ELECTROMAGNETIC COMPATIBILITYEN 50082-2ImmunityEN 61000-4-2Electrostatic Discharges.EN 61000-4-4Burst and fast Transients.ENV 50140Radiated radio frequencyelectromagnetic fieldsENV 50141Conducted disturbance induced byradio frequence fields.According to the EC Directive: 89/336/CEE on Electromagnetic Compatibility.DECLARACION DE CONFORMIDADFabricante: Fagor Automation, S. Coop.Barrio de San Andrés s/n, C.P. 20500, Mondragón -Guipúzcoa- (ESPAÑA)Declaramos bajo nuestra exclusiva responsabilidad la conformidad del producto, con las normas:COMPATIBILIDAD ELECTROMAGNÉTICA:EN 50082-2InmunidadEN 61000-4-2Descargas Electrostáticas.EN 61000-4-4Transitorios Rápidos y Ráfagas.ENV 50140Campos electromagnéticos radiados enradiofrecuencia.ENV 50141Perturbaciones conducidas por camposen radiofrecuencia.De acuerdo con las disposiciones de la Directiva Comuni-taria: 89/336/CEE de Compatibilidad Electromagnética.Mondragón a 1 de Octubre de 2001Mondragón October 1st 2001The information described in this manual may be subject to variations due to technical modifications.FAGOR AUTOMATION, S. Coop. Ltda. reserves the right to modify the contents of this manual without prior notice.*Term: 12 months from factory invoice date.*It covers parts and labor at FAGOR AUTOMATION.*Travel expenses are payable by the customer.*Damages due to causes external to FAGOR AUTOMATION, such as unauthorized manipulation,blows, etc. are not covered.WARRANTYLa información descrita en este manual puede estar sujeta a variaciones motivadas por modificaciones técnicas.FAGOR AUTOMATION S. Coop. Ltda. se reserva el derecho de modificar su contenido, no estando obligada a notificar las variaciones.*12 meses desde fecha de expedición de fábrica.*Cubre gastos de Materiales y Mano de Obra de repa-ración en FAGOR AUTOMATION.*Gastos de desplazamiento a cargo del cliente.*No cubre averías por causas ajenas a FAGOR AUTOMATION, como: golpes, manipulación por per-sonal no autorizado, etc.GARANTIAFagor Automation S. Coop.Bº San Andrés Nº19Apdo Correos 14420500 - Arrasate/Mondragón- Spain -Web: Email: info@fagorautomation.es Tel.: (34) 943 719200Fax: (34) 943 791712。
绝对值光栅尺的参考点设置及其重要性解析
肯定值光栅尺的参考点设置及其紧要性解析肯定值光栅尺是一种常用的测量设备,广泛应用于工业制造、机械加工等领域。
为了确保精准明确度和牢靠性,在使用过程中需要设置参考点。
下面就来说说光栅尺的参考点设置原理及其紧要性。
一、参考点设置原理1、工作原理:光栅尺通过光电传感器和光栅条纹之间的相互作用来实现距离测量。
光栅条纹被划分成等距的刻痕,当光电传感器经过一个刻痕时,会产生一个电信号。
通过计算电信号的数量,可以确定物体的位置。
2、参考点设置:光栅尺在安装时需要设定一个参考点,即零位点。
参考点通常设置在光栅尺的起始位置。
当光电传感器经过参考点时,会发出一个特定的信号,表示已到达零位点。
在后续测量中,该信号可以作为参考,用于确定物体的位置。
二、肯定值光栅尺参考点设置的紧要性1、提高测量精度:通过设置参考点,可以确保每次测量都是相对于同一起点进行的,除去了累积误差。
这样可以提高测量的精准性和精度。
2、便利复位操作:参考点的设定使得光栅尺在使用过程中能够便利地进行复位操作。
当需要重新开始测量或调整测量位置时,只需将光电传感器移动至参考点,即可重新确定零位,进行下一次测量。
3、加强测量稳定性:参考点的设置有助于提高测量的稳定性。
在确立了零位后,即使发生意外情况(如停电、设备故障等),再次启动时也能够精准恢复到之前的测量状态,避开了不必要的困扰和误差。
4、支持数据比对与校准:参考点的设定还可以用于数据比对与校准。
当多个肯定值光栅尺同时使用时,可以通过比对各自参考点的位置,确保各个光栅尺之间的一致性和精准性。
三、参考点设置的注意事项1、设置参考点前,确保光栅尺的安装位置正确,避开后期调整影响测量精度。
2、参考点的位置应选择在工作范围内,并尽可能靠近实际测量位置,以提高测量精度。
3、设置参考点时,要依照光栅尺的使用说明进行操作,确保参考点的稳定性和牢靠性。
4、定期检查参考点的精准性,并依据需要进行校准和调整,以确保测量结果的精准性和牢靠性。
光栅尺说明书-中文20100925

1. 技术参数
1.1、栅距: 1.2、分辨率: 1.3、精度: 1.4、量程: 0.02 mm (50 线/mm) 5µm、1µm、0.5µm ±3µm、±5µm、±15µm/m (20±0.1℃时) 30~3000mm
1.5、移动速度: 高速尺 120 m/min(需订做) 普通尺 60m/min 1.6、电源: +5V±5%、80mA
Ⅰ-1操 作 指 南SINO操 作 指 南
● 使用者在使用前必须阅读概况、安全注意事项及第 1~3 章节的全部内容。 ● 安装调试维修的技术人员除阅读概况、安全注意事 项及第 1~3 章节内容以外一定要熟读第 4~5 章节的 全部内容。 ● 本操作说明只适合(SINO)品牌的 KA 系列封闭式线 性光栅尺使用。 ● 请阅读下面的安全事项,它是有关安全使用您的线 性光栅尺的至关重要信息。
L0 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000
L1 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 2150
L2 1170 1270 1370 1470 1570 1670 1770 1870 1970 2070 2170
pw
2
长度线性光栅尺 (使用说明书 )
SINO
2. 光栅尺的结构:
光栅尺主要由尺体和读数头组成,结构如图 1 所示
1
KA-300
尺体安装孔 密封胶条
4 2
尺体端盖
松紧螺钉 调节螺钉
3
读数头安装孔
1
KA-600
尺体安装孔 密封胶条 尺体端盖 松紧螺钉
4 2
调节螺钉
3 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
哈挺机床(上海)有限公司 Hardinge Machine (Shanghai) Co., Ltd 制定人:KKX 2008-12-04 版本:01
EU 带距离码光栅尺零点调试
1) 全闭环开通
1. 光栅尺安装完毕,检查系统功能为选项是否开通,请检查诊断画面N1203#4 (0i-mc )N1139#2(0i-md)
是否为“1”。
若为零,请与工程部联系,以开通此功能。
2 .将光栅尺检测功能开通
将参数设为全闭环控制
N1815#1 OPT 改为:“1”
N1815#2 改为 1
关机20秒后重启系统
2) 各轴运行检测
手轮方式移动各轴
检查各轴是否平稳
检查各轴急停是否有效
3) 相关参数
若N1820 为2,CMR=1时
N1821 20000
N1882 20020
若N1820为20,CMR=10
N1821 200000
N1882 200200
4) 设定参考点(以X 轴为例)
1. 在“MDI ”方式将1883置“0”
2. 关机20秒后系统重启
3. 在“MDI ”方式,按一下“”OFFSET ”,切换到工件坐标系画面,将工件坐标系G53,G54清“0”
4. 切换到回零方式,执行X 回零操作,工作台在回零方向连续移动3次后停止
5. 将方式开关切换为手轮方式,然后将工作台移至机床参考点位置,记下此时的机械坐标值,如:-9998.456
6. 切换工作方式到“MDI ”,拍下急停,将机械坐标输入参数N1883
如:-9998456 注意去掉小数点,否则系统会报警“格式不对”
注意,如果CMR=20时,放大10倍。
7. 关机20秒后系统重启
8. 在回零方式,执行X 回零操作,工作台在回零方向连续移动3次后停止,查看此时机械坐标,看与到参考点的实际距离是否一致。
若一致,切换一下工作方式开关,再回到回零方式,执行回零,零点设置完成;若不一致,从第一步重新开始。