第六章定位误差
机械制造工艺学(第三版)王先逵_课后答案
保证对称度——限制沿Y移动和Z 转动;
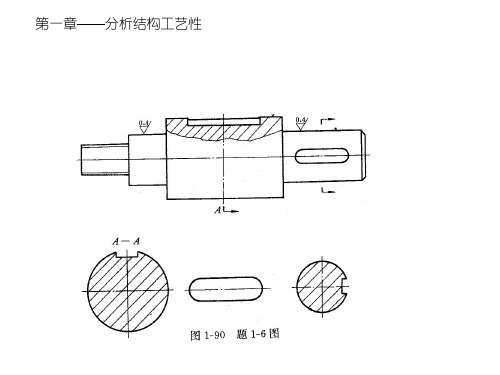
第一章 1-12题
a)
总体分析法:三爪卡盘+固定后顶尖——限制 X Y Z ;固定后顶尖—— 分件分析法:三爪卡盘—— YZ X 两者一起限制五个自由度 X Y Z Y Z Y ZY Z 总体分析法:前后圆锥销—— 分件分析法:前圆锥销——限制 X Y Z ; 浮动后圆锥销——限制 X Y 两者一起限制五个自由度 X Y Z Y Z
L2=0±0.025 L4=4+0.20和H组成尺寸链,直接 可以保证的尺寸有L1,L2 ,L3,H;L4为封
闭环(间接保证的尺寸)
增环:L2,H;减环L1;L3既可看成增环也 可是减环(因其基本尺寸=0) 解得:H=4.25+0.107+0.0175=4.2675
+0.0895 0
第四章习题4-18:尺寸链计算
3. 铣床工作台T形槽侧面对工作台燕尾槽导轨的平行度误差
第二章补充题:
• 在车床上加工心轴,粗、精车外圆及台肩面,经检测发现外圆面 有圆柱度误差,台肩面对外圆轴线有垂直度误差,试从机床几何 误差的影响,分析产生以上误差的主要原因
第二章补充题:
图示零件的A、B、C面, Φ10H7及Φ30H7孔均已加工。试分析加工Φ12H
解尺寸链得: L=130±0.04mm, 50±0.04mm
解: (2)直接测量的尺寸为:A1 ,及两孔直径,尺寸80 ±0.08 在测量工序中是间接得到的,因 此是封闭环是80 ±0.08
80 A1 7.5 7.5 0.08 0 0 EI A
0 05 A1 650..08 m m
无过定位,欠定位
定位误差的分析与计算课件

总结词
铣削加工中的定位误差主要来源于工件和夹具的安装误 差,以及夹具和机床的制造误差。
详细描述
在铣削加工中,工件和夹具的接触面、夹具的夹紧力和 工件的刚性等因素都会影响定位误差。同时,夹具和机 床的制造精度以及工件和夹具的安装精度也是导致定位 误差的重要因素。
磨削加工定位误差分析
总结词
磨削加工中的定位误差主要来源于工件和夹具的接触 面、夹具的制造误差以及工件的刚性。
按工件尺寸链计算定位误差
总结词
按工件尺寸链计算定位误差是一种基于工件 尺寸链的定位误差计算方法。通过分析工件 尺寸链中各尺寸之间的关系,可以计算出定 位误差的大小。
详细描述
工件尺寸链是加工过程中各相关尺寸之间的 相互关系。通过分析工件尺寸链中各尺寸之 间的关系,可以确定工件在夹具中的位置, 从而计算出定位误差。这种方法适用于具有 复杂尺寸关系的加工过程。
车削加工定位误差分析
要点一
总结词
车削加工过程中,定位误差主要来源于夹具和工件的安装 误差,以及夹具和机床的制造误差。
要点二
详细描述
车削加工时,夹具的夹紧力、工件的刚性和夹具的制造精 度都会影响定位误差。此外,工件和夹具的安装不正或夹 具与机床间的间隙也会导致定位误差的产生。
铣削加工定位误差分析
定位误差计算
根据工件、夹具和机床的 几何参数、运动关系等因 素,计算出定位误差的大 小。
定位误差的分类
系统பைடு நூலகம்差
由于机床、夹具、刀具等制造、 安装或磨损等原因引起的定位误 差,具有重复性和规律性。
随机误差
由于工件、夹具、刀具等受到温 度、湿度、振动等环境因素影响 而引起的定位误差,具有随机性 和不确定性。
分组法
第六章:滴定分析概述有效数字
用“%RE”表示。
即:绝对误差:E=X-T
相对误差:(%)RE=E/T×100
误差越小,表示实验结果与真实值越接 近,测定的准确度也越高 与绝对误差相比,相对误差更能反映出
实验结果的准确程度
因此在滴定分析中一般多采用相对误差
来表示测量的准确度。
(三)偏差与精密度 精密度指多次重复测定的结果相互接近的程度, 是保证准确度的前提。 偏差是指各次测定的结果和平均值之间的差值。 偏差越小,精密度越高。
也只取3位。运算的结果也保留3位有效数字:
0.0231×24.6×1.17=0.665
3、在对数运算中,所取对数的位数应与真数 的有效数字位数相同 例如: lg9.6的真数有两位有效数字,则对数
应为0.98,不应该是0.982或0.9823
又如[H+]为3.0×10-2 mol· -1时,PH应 L
方法消除或克服。
在不加试样的情况下,按照样品分析步骤
和条件进行分析试验称为空白试验,所得结果
称为空白值。从试样测定结果中扣除空白值,
便可以消除因试剂、蒸馏水及实验仪器等因素
引起的系统误差。
将组分含量已知的标准样品和待测样品在 相同条件下进行分析测定。用标准样品的测定 值与其真实值的差值来校正其他测量结果,这 种方法称为对照试验。 除此之外,还可以通过校准仪器来消除仪
偏差分为绝对偏差(d)、相对偏差(Rd)、 平均偏差(d)和相对平均偏差 (%) Rd ,它 们的表达式为 : 绝对偏差
相对偏差
平均偏差
相对平均偏差
式中d1,d2…dn为第1,2…n次测量结果的偏差,
X为单次测定值,X 为测定平均值。
对于一般的滴定分析来讲,因测定次数不多,
机械制造工艺学(王先逵)-第六章-夹具设计习题及答案
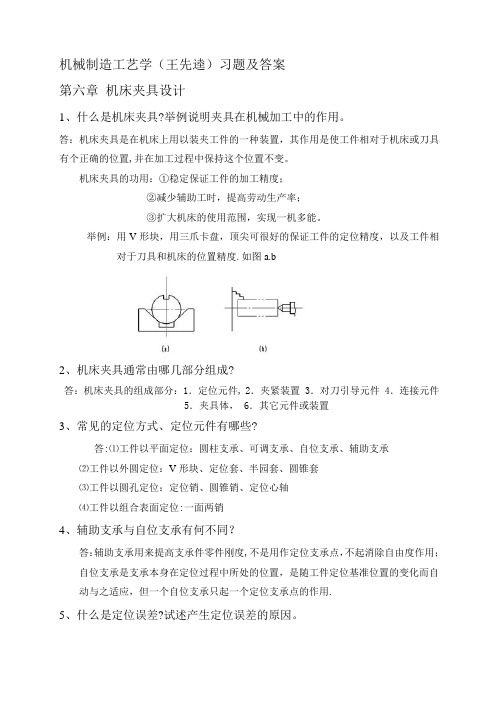
机械制造工艺学(王先逵)习题及答案第六章机床夹具设计1、什么是机床夹具?举例说明夹具在机械加工中的作用。
答:机床夹具是在机床上用以装夹工件的一种装置,其作用是使工件相对于机床或刀具有个正确的位置,并在加工过程中保持这个位置不变。
机床夹具的功用:①稳定保证工件的加工精度;②减少辅助工时,提高劳动生产率;③扩大机床的使用范围,实现一机多能。
举例:用V形块,用三爪卡盘,顶尖可很好的保证工件的定位精度,以及工件相对于刀具和机床的位置精度.如图a.b2、机床夹具通常由哪几部分组成?答:机床夹具的组成部分:1.定位元件, 2.夹紧装置 3.对刀引导元件 4.连接元件5.夹具体, 6.其它元件或装置3、常见的定位方式、定位元件有哪些?答:⑴工件以平面定位:圆柱支承、可调支承、自位支承、辅助支承⑵工件以外圆定位:V形块、定位套、半园套、圆锥套⑶工件以圆孔定位:定位销、圆锥销、定位心轴⑷工件以组合表面定位:一面两销4、辅助支承与自位支承有何不同?答:辅助支承用来提高支承件零件刚度,不是用作定位支承点,不起消除自由度作用;自位支承是支承本身在定位过程中所处的位置,是随工件定位基准位置的变化而自动与之适应,但一个自位支承只起一个定位支承点的作用.5、什么是定位误差?试述产生定位误差的原因。
答:定位误差:是由于工件定位造成的加工面相对工序基准的位置误差,由于对同一批工件说,刀具调整后位置是不动的,即被加工表面的位置相对于定位基准是不变的,因此定位误差就是工序基准在加工尺寸方向上的最大变动量.造成定位误差的原因:⑴定位基准和工序基准不一致所引起的基准不重合误差Δjb⑵由于定位副制造误差及配合间隙所引起的定位误差,即基准位移误差Δjw7、工件在夹具中夹紧时对夹紧力有何要求?答:⑴方向:①夹紧力的作用方向不破坏工件定位的准确性和可靠性②夹紧力方向应使工件变形尽可能小③夹紧力方向应使所需夹紧力尽可能小;⑵夹紧力作用点:①夹紧力作用点应靠近支承元件的几何中心或几个支承元件所形成的支撑面内②夹紧力作用点应落在工件刚度较好的部位上③夹紧力作用点应尽可能靠近被加工表面;⑶夹紧力的大小:夹紧力的大小主要确定方法有经验类比和分析计算法。
GPS测量原理及应用各章知识点总结

GPS测量原理及应用各章知识点总结桂林理工大学测绘08-1 JL(纯手打)第一章绪论1、GPS系统是以卫星为基础的无线电导航定位系统,具有全能性、全球性、全天候、连续性和实时性的导航、定位和定时的功能。
能为各个用户提供三维坐标和时间。
2、GPS卫星位置采用WGS-84大地坐标系3、GPS经历了方案论证、系统论证、生产试验三个阶段。
整个系统包括卫星星座、地面监控部分、用户接收机部分。
4、GPS基本参数为:卫星颗数为21+3,卫星轨道面个数为6,卫星高度为20200km,轨道倾角为55度,卫星运行周期为11小时58分,在地球表面任何时刻,在高度较为15度以上,平均可同时观测到6颗有效卫星,最多可以达到9颗。
5、应用双定位系统的优越性:能同时接收到GPS和GLONASS卫星信号的接收机,简称为双系统卫星接收机。
(1)增加接收卫星数。
这样有利于在山区和城市有障碍物遮挡的地区作业(2)提高效率。
观测卫星数增加,所以求解整周模糊度的时间缩短,从而减少野外作业时间,提高了生产效率。
(3)提高定位的可靠性和精度。
因观测的卫星数增加,用于定位计算的卫星数增加,卫星几何分布也更好,所以提高了定位的可靠性和精度。
6、在GPS信号导航的定位时,为了解算测站的三维坐标,必须观测4颗(以上)卫星,称为定位星座。
7、PRN----------卫星所采用的伪随机噪声码8、在导航定位测量中,一般采用PRN编号。
9、用于捕获信号和粗略定位的为随机码叫做C/A码(又叫S码),用于精密定位的精密测距码叫P码10、GPS系统中各组成部分的作用:卫星星座1、向广大用户发送导航定位信息。
2、接收注入站发送到卫星的导航电文和其他相关信息,并通过GPS信号电路,适时的发送给广大用户。
3、接收地面主控站通过注入站发送到卫星的调度命令,适时的改正运行偏差和启用备用时钟等。
地面监控系统地面监控系统包括1个主控站,3个注入站和5个监测站。
1、监测和控制卫星上的设备是否正常工作,以及卫星是否一直沿着预定轨道运行。
机械制造工艺学4,6章习题答案

关于同轴度误差引起的定位误差: 如下图,工艺基准为孔的下母线,而定位基准为轴的中心线,若外圆及孔的 尺寸无误差,则引起工序基准位置变化的原因为孔轴的同轴度误差,工序基 准位置最大的变动量=T(同轴度公差值),即Δdw =Δjb =T; 若考虑外圆
和孔的尺寸的公差Td和TD,则Δjw = Δdw =Δjb+ Δjw
+0.0895 0
习题4-18 某零件的轴向尺寸如图a),轴向尺寸加工工序如图b),c),d,试校核工序图
上标注的工序尺寸及公差是否正确(加工符号表示本道工序的加工面)
解:先校核 b)图上的工序 尺寸:计算由a),b),c)图有 关尺寸组成的尺寸链, L1=40.30-0.1 L2=10.40-0.2 L3=100-0.1 L4=40
L3 L2
20 = 60 + L 4 − 70 L 4 = 30 mm ES L 4 = + 0 . 1mm
L1
+ 0 . 15 = ES L 4 + 0 − (− 0 . 05 )
0 = EI L 4 − 0 . 025 − ( − 0 . 025 _ EI L 4 = 0 mm
+ ∴ L 3 = 30 0 0 .1 mm
解尺寸链得: L=130±0.04mm, 50±0.04mm
第六章习题 6-1:选择粗、精加工基准分析定位方案:1)指出限制的自由度
数;2)判断有无欠定位或过定位;3)对不合理的定位方案提出改进意见
在O处钻孔
形块共限制六个自由度;为 保证孔轴线过中心O应该限制六个 自由度,因此无过定位和欠定位
Td 2 sin
α
2
; Δjb =T+ Td/2;
第六章习题 6-4:定位误差计算
第六章:GPS动态定位原理

6
2 GPS动态相对定位原理
虽然动态绝对定位作业简单,易于快速的实现实时定位, 但是,由于定位过程中受到卫星星历误差,钟差,及信号 传播误差等诸多因素的影响,其定位精度不高,难以满足 高精度动态定位的要求,因此,限制了其应用范围。
由于GPS测量误差具有较强的相关性,因此,可以在 GPS动态定位中引入相对定位作业的方法,即GPS动态相 对定位。该方法实际上是用两台GPS接收机,将一台接收 机安置在基准站上固定不动,另一台接收机安置在运动的 载体上,两台接收机同步观测相同的卫星,通过在观测值 之间求差,以消除具有相关性的误差,提高定位精度。而 运动点的位置是通过确定该点相对基准站的位置实现的, 这种定位方法也叫差分GPS定位。
7
2 GPS动态相对定位原理
动态相对定位分为以测距码伪距为观测量的动态相对定 位和以载波相位伪距为观测量的动态相对定位。
测距码伪距相对动态定位,由安置在点位坐标精确已知 的基准站接收机测量出该点到GPS卫星的伪距D~ij ,该伪距 包含了卫星星历误差,钟差,大气折射误差等各种误差的
影响。此时,由于基准接收机位置已知,利用卫星星历数 据可计算出基准站到卫星的距离Dij ,该距离中仍包含有相
GPS
(单位:m) 3.0 2.4 24 24 4.0 0.4
1.0 34.4 103.2
DGPS(单位:m) 间距(km)
0 100 300 500 0000 0 0.04 0.13 0.22 0.25 0.25 0.25 0.25 0 0.43 1.30 2.16 0 0.73 1.25 1.60 0 0.40 0.40 0.40 0.50 0.50 0.50 0.50 0.20 0.20 0.20 0.20 0.59 1.11 1.94 2.79 1.0 1.0 1.0 1.0 1.16 1.49 2.19 2.96 3.5 4.5 6.6 8.9
定位误差分析计算

定位误差分析计算定位误差分析是指对定位系统的定位误差进行计算与分析的过程。
定位误差是指实际测量值与真实值之间的差异,通常用来衡量定位系统的准确性和稳定性。
定位误差分析可以帮助我们了解定位系统的精度、稳定性、重复性等性能指标,并为改进系统设计或算法提供参考。
1.收集数据:收集一系列的定位数据,包括定位系统输出的位置值和相应的真实位置值。
这些数据可以通过实地实验、仿真模拟或者信号生成器等方式获取。
2.计算误差:将定位系统输出的位置值与真实位置值进行比较,计算其误差。
常用的误差计算方法包括:绝对误差、相对误差、均方根误差等。
-绝对误差是指测量值与真实值之间的差异,即误差=,测量值-真实值。
-相对误差是指测量值相对于真实值的误差比例,即误差=,(测量值-真实值)/真实值。
- 均方根误差是指测量值与真实值之间差异的平方和的平均值的平方根,即误差= sqrt(Σ(测量值 - 真实值)²/n)。
3.统计分析:对测量误差进行统计分析,包括计算平均误差、最大误差、方差、标准差等指标。
统计分析可以帮助我们了解定位系统整体的误差分布情况和统计特性,进一步评估系统性能。
4.误差源分析:将测量误差分解为不同的误差源,例如硬件误差、环境误差、算法误差等。
通过定位误差分解和分析,可以找出主要的误差源,并采取相应的措施进行修正或改进。
5.修正与优化:根据误差分析的结果,对定位系统进行修正和优化。
根据误差源的不同,可以采取不同的措施,例如改进硬件设备、优化信号处理算法、增加定位基站等。
总结:定位误差分析是通过计算和分析定位系统的定位误差,来评估系统性能和找出改进措施的过程。
通过收集数据、计算误差、统计分析、误差源分析和修正与优化等步骤,可以得到对定位系统准确性和稳定性的评估,为后续的系统设计和优化提供依据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
考虑定位方案时,先分析必须消除哪些自由度, 再以相应定位点去限制。
(3)欠定位与过定位
工件应限制的自由度未被限制的定位,为欠定位,
在实际生产中是绝对不允许的。 工件一个自由度被两个或以上支承点重复限制的
定位称为过定位或重复定位。一般来说也是不合 理的。
过定位造成的后果: (1)使工件或夹具元件变形,引起加工误差; (2)使部分工件不能安装,产生定位干涉(如一面两销) 过定位一般是不允许的,但在精加工时也可看到。
空间得到唯一确定的位置,此即
六点定位原理。
实际中一个定位元件可体现一个或多个支承点,
视具体工作方式及其与工件接触范围大小而定
定位与夹紧的区别:
定位是使工件占有一个正
确的位置,夹紧是使工件保持这个正确位置。 (2)完全定位与不完全定位 工件的六个自由度被完全限制的定位称完全定位,
允许少于六点的定位称为不完全定位。
jw2 O1O 2 Td 1 2 sin 2
jb2
dw2
j w2
Td 1 ( 1) 2 sin 2
(2)工件以外圆柱面定位时的定位误差
② 工序尺寸以H2标注,其定位误差也可以这样求得:
Δd2=A1A2=A1O1+43;1 α + sin sin 2 2 2 2 2 2
(2)工件以外圆柱面定位时的定位误差
工件在V形块上定位( V形块是一种对中——定心元件)
(2)工件以外圆柱面定位时的定位误差
① 工序尺寸以H1标注(设计基准为工件轴心线,定位基准也 是工件轴心线),其定位误差为: a .基准不重合误差:Δdjb1=0
b. 但由于工件的制造误差(外圆直径变化),从而导致工 件外圆中心在V形块的对称轴线上发生上下偏移,即存在基 准位置误差:
辅助时间,提高了成品率,降低了成本。 (3)扩大机床的加工范围 如在车床上加镗夹具,可完成镗孔加工。 (4)减轻工人劳动强度
二、工件在夹具中的定位
工件定位目的:使同批工件在机床或夹具上有正确位置
1. 工件的定位方法
(1)直接找正定位 效率低,适于单件小批生产和定位精度要求较高的情况 (2)划线找正定位
适于单件小批生产或毛坯精度较低、大型工件粗加工
(3)夹具中定位 效率高,易保证质量,广泛用于批量生产
2. 工件在夹具中的定位
(1)六点定位原理
未定位工件在空间有六个自由度, 定位就是限制其自由度。 合理布置六个定位支承点,使工 件上的定位基面与其接触,一个 支承点限制工件一个自由度,使
工件六个自由度被完全限制,在
① 心轴垂直放置(图6.22(a))
dw O1O2 Dmax d min ( D TD ) (d Td ) TD Td ( D d ) TD Td min max
6.2.3.2 常见定位方法的定位误差计算 (3)工件以内孔表面定位时的定位误差
Y
2.导向定位基准 (限制2个自由度)
3.止动定位基准 (限制1个自由度)
X
图 6-9 六点定位原理
6.2.3.2 常见定位方法的定位误差计算 (1) 工件以平面定位时的定位误差
平面度误差很小,定位副制造不准确误差可忽略(即 △jw=0),所以定位误差主要由基准不重合引起。
6.2.3.2 常见定位方法的定位误差计算 (1) 工件以平面定位时的定位误差
4)外圆定心夹紧
三爪卡盘、双V形铁定心夹紧、弹簧夹头
外圆定位分析
(4) 工件以其它表面定位
渐开线齿面定位分析
(5) 组合表面定位 1)一个平面和与其垂直的两个孔组合
这种定位属于过定位
解决办法是:
将销2做成
削边销
2)一平面和与其垂直的两外圆柱面组合
3)一孔和一平行于孔中心线的平面组合
6.2.3 定位误差
(2)工件以外圆柱面定位时的定位误差
工件在V形块上定位
④ 定位误差分析:
a) 定位误差Δdw 随工件误差Td 的增大而增大;
b) 定位误差Δdw 随V形块夹角α 增大而减小,但稳定性变差; c) 定位误差Δdw 与工序尺寸标注方式有关,Δdw2 >Δdw1 > Δdw3 d) 水平方向定位误差Δdw =0
第六章 机床夹具设计原理
6.1 机床夹具概述
在机床上用于装夹工件或 引导刀具的装置。 夹具的作用:定位+夹紧
1. 夹具的组成
(1)定位元件 (2)夹紧元件 (3)导向元件(钻套、对刀块) (4)夹具体 此外有连接元件、分度机构、
操作元件等。
2.机床夹具的分类
按使用特点分: (1)通用夹具 (2)专用夹具 (3)成组夹具 (4)组合夹具 (5)随行夹具 按使用机床分:
dw jb jw jw
6.2.3.2 常见定位方法的定位误差计算 (3)工件以内孔表面定位时的定位误差
根据工件装夹时心轴放置位置的不同,可分为如下两种情况: ① 心轴垂直放置(图6.22(a))改错
6.2.3.2 常见定位方法的定位误差计算 (3)工件以内孔表面定位时的定位误差
jw1 O1O 2 O1C - O 2 C d Td d 1 1 2 sin 2 sin 2 2 Td 1 2 sin 2
j b1
dw1
jw 1
Td 1 2 sin 2
(2)工件以外圆柱面定位时的定位误差
②工序尺寸以H2标注(设计基准为工件上母线,定位基准是工 件轴心线),其定位误差为: a .基准不重合误差(由A1下降至A′2 ):Δdjb2=A1A′2=Td/2 b. 但由于工件的制造误差(外圆直径变化),从而导致工件 外圆中心在V形块的对称轴线上发生上下偏移,即存在基准 位置误差(此时上母线继续下降(由A′2下降至A′′2),下降量 为 O 1 O 2):
6.2.3.2 常见定位方法的定位误差计算 (3)工件以内孔表面定位时的定位误差
考虑工件孔与定位心轴采用间隙配合,以孔中心线为工序 基准时的定位误差。注意:心轴的中心线位置不变。 此时,工序基准和定位基准都是中心线,基准重合,故
jb 0
但是,由于工件孔和心轴是间隙配合又都有制造误差,所 以存在孔中心线的位置变化,即有基准位置误差,故
6.2.3 定位误差
对一批工件来说,刀具经调整后相对于定位基准的位置是不变的,即工件 被加工表面的位置相对于定位基准的位置也是不变的,所以定位误差就是 工序基准在加工尺寸方向上的最大变动量,以△dw 表示。
成批加工工件时,夹具相对机床的位置及切削运动
的行程调定后不再变动,可认为加工面的位置是固定的。
3. 常见定位方法与定位元件
(1) 工件以平面定位
1) 固定支承(支承钉、支承板、定位分析)
2) 可调支承
多用于毛面定位,每批调整一次,以补偿各批 毛坯误差
3) 自位支承
支承本身可随工件定位基准面的变化而自动适应, 一般只限制 一个自由度, 即一点定位。
4) 辅助支承
在工件定位后才参与支承的元件,不限制自由度, 主要用于提高工件的刚度和定位稳定性。
本章只考虑定位误差对加工精度的影响。
上式可写成:
dw T
△dw——定位误差;
ω——除定位误差外,其它因素所引起的误差总和。
定位误差概念
定位误差——由于工件在夹具上(或机床上)定位不准确 而引起的加工误差,即由工件定位所造成的加工面相对工序 基准的位置误差。 用夹具来定位工件——调整法加工。
ΔDW
b a
工序基准
6.2.3.1 定位误差的组成(来源) 定位误差包括基准不重合误差和基准位置误差
1)基准不重合误差△jb——定位基准与工序基准不一致所引 起的定位误差。
其大小等于工序基准相对于定位基准在加工尺寸方向上的最大变动量(公 差)。
一次安装加工两孔A和B,孔B在X方向定位基准C与设计基 准A不重合,基准不重合误差为联系尺寸22的公差0.2
消除过定位及其干涉的途径:
1. 改变定位元件结构,消除对自由度的重复
限制,如长销改成短销; 2. 提高工件定位基面之间的位置精度,提高 夹具定位元件之间的位置精度,减少或消
除过定位引起的干涉,精加工时可增加刚
度和定位稳定性。
3. 常见定位方法与定位元件
(1) 工件以平面定位
1) 固定支承(支承钉、支承板)
车床夹具、铣床夹具、 钻床夹具、镗床夹具 按动力源分: 手动夹具、气动夹具、液压夹具、 电动夹具、磁力夹具、真空夹具等
3.机床夹具的功用
(1)保证加工精度 零件加工精度包括尺寸精度、几何形状和表面相互 位置精度。夹具的最大功用是保证加工表面的位置精度。 (2)提高生产率,降低生产成本
快速将工件定位夹紧,免除了找正、对刀等,缩短
ΔDW
O O1 O2
A
图6-26 定位误差
H
2.4.5 定位误差
定位误差的实例
图 6-27 所示工件以底面 定位铣台阶面,要求保证 尺寸a,即工序基准为工件 顶面。如刀具已调整好位 置,则由于尺寸b的误差会 定位基准 使工件顶面位置发生变化, 图6-27 由于基准不重合引起 的定位误差 从而使工序尺寸a产生误差。
2)基准位置误差△jw——定位基准面和定位元件本身的制
造误差所引起的定位误差。
即工件的定位基准在加工尺寸方向上的最大变动量。由工件定位面和夹 具定位元件的制造误差以及两者之间的间隙所引起。
6.2.3.1 定位误差的组成 定位误差包括基准不重合误差和基准位置误差
所以,定位误差可表示为
dw jb jw
但因一批工件中每个工件在尺寸形状及表面相互位置上 均存在差异,所以定位后各表面有不同的位置变动。 工序基准的位置变动将对加工精度有直接影响。