利用PWM控制占空比
如何用ePWM模块实现0100占空比控制
如何用ePWM模块实现0%~100%占空比控制关键字:占空比ePWM PWM满量程在某些应用中让占空比控制达到满量程0%~100%是非常重要的。
TMS320x280x系列处理器使用灵活、配置丰富,是在整个范围内实现满量程占空比控制的最佳选择。
增强型脉宽调制模块在保证系统开销最小的前提下可提供0%~100%占空比。
这些模块有三种工作模式:加法计数模式、可逆计数模式和减法计数模式,本文重点讨论前两种工作模式。
这里对TMS320x280xx/28xxx e PWM的基本使用不做详细介绍,并假设用户已熟悉TMS320x280xx/28xxx ePWM(SPRU791)的使用。
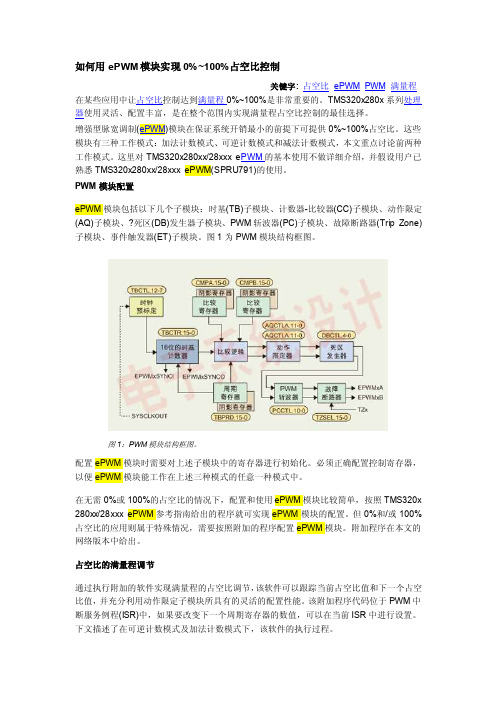
PWM模块配置ePWM模块包括以下几个子模块:时基(TB)子模块、计数器-比较器(CC)子模块、动作限定(AQ)子模块、?死区(DB)发生器子模块、PWM斩波器(PC)子模块、故障断路器(Trip Zone)子模块、事件触发器(ET)子模块。
图1为PWM模块结构框图。
图1:PWM模块结构框图。
配置ePWM模块时需要对上述子模块中的寄存器进行初始化。
必须正确配置控制寄存器,以便ePWM模块能工作在上述三种模式的任意一种模式中。
在无需0%或100%的占空比的情况下,配置和使用ePWM模块比较简单,按照TMS320x 280xx/28xxx ePWM参考指南给出的程序就可实现ePWM模块的配置。
但0%和/或100%占空比的应用则属于特殊情况,需要按照附加的程序配置ePWM模块。
附加程序在本文的网络版本中给出。
占空比的满量程调节通过执行附加的软件实现满量程的占空比调节,该软件可以跟踪当前占空比值和下一个占空比值,并充分利用动作限定子模块所具有的灵活的配置性能。
该附加程序代码位于PWM中断服务例程(ISR)中,如果要改变下一个周期寄存器的数值,可以在当前ISR中进行设置。
下文描述了在可逆计数模式及加法计数模式下,该软件的执行过程。
1. 可逆计数模式当工作在可逆计数模式(PWM波形对称)时,若加法计数达到的值与CMPA值相匹配,置位ePWMxA输出;若减法计数达到的值与CMPA值相匹配,ePWMxA输出复位;如果CMP A值与计数器的值不匹配,则调用ISR并加载阴影寄存器。
pwm舵机控制原理
pwm舵机控制原理
PWM(Pulse-Width Modulation)是一种通过调整脉冲宽度来
控制输出信号的方法。
在舵机控制中,利用PWM信号的高电
平时间长度来控制舵机转动的角度。
舵机控制原理如下:
1. 首先,通过舵机电源提供电压给舵机。
2. 使用微控制器或其他驱动器生成一个频率固定的PWM信号,一般频率为50Hz。
3. 调整PWM信号的占空比,即高电平持续时间的比例,来控
制舵机的角度。
一般舵机的范围是0°到180°,对应的占空比
范围一般是5%到10%。
例如,如果占空比为5%,则高电平
的持续时间为20ms * 0.05 = 1ms;如果占空比为10%,则高电平的持续时间为20ms * 0.1 = 2ms。
4. 发送PWM信号给舵机,舵机根据信号的高电平时间长度来
确定角度,进而将舵机转动到相应的位置。
需要注意的是,舵机控制信号的频率和占空比的具体数值可能有所不同,具体的数值根据舵机的型号和要求来确定。
PWM控制器的主要参数

PWM控制器的主要参数PWM控制器是一种基于脉冲宽度调制技术的(电子)设备,用于控制电能的输出或输出电压和(电流)的波形。
PWM控制器主要参数、特点和应用如下。
主要参数:1.PWM频率:PWM控制器输出脉冲的频率,常用的PWM控制器频率一般在几百kHz到数MHz之间。
2.脉冲宽度:PWM脉冲宽度是实现通过(比较器)输出的控制电压与参考电压之间的差值,它控制输出电压和电流的平均值。
3.占空比:PWM控制器输出波形中高电平的时间占整个周期的百分比,也就是PWM(信号)的占空比。
PWM控制器的占空比控制范围通常为0%到100%。
4.最大输出电流:PWM控制器能够输出的最大电流。
5.工作电压范围:PWM控制器的工作电压范围。
特点:1.高效节能:PWM控制器根据控制电压与参考电压的差异,动态调整输出电压和电流,实现电能的高效利用,节约能源的同时减少系统的发热和耗能。
2.稳定可靠:PWM控制器控制电压和电流的输出波形稳定,能够确保电路的稳定性和可靠性。
3.可(编程)性强:PWM控制器可编程,可根据不同需求自由调整频率、脉冲宽度和占空比等参数。
4.应用范围广:PWM控制器可应用于(DC)-DC变换器、LED控制器、(电机控制)器、(电源管理)器和逆变器等领域。
应用:1.DC-DC变换器:PWM控制器可用于DC-DC变换器中,控制输入电压和输出电压之间的转换效率,并可根据负载需求调整输出电压和电流。
2.LED控制器:PWM控制器可用于LED控制,通过调整占空比控制LED亮度和颜色,实现LED的调光和彩色控制。
3.(电机)控制器:PWM控制器可用于电机控制器中,反馈控制电机速度和转矩,控制电机的运行和停止。
4.(电源)管理器:PWM控制器可用于电源管理器中,控制电源的输出电压和电流大小,保证系统的稳定和可靠。
5.逆变器:PWM控制器可用于逆变器中,将直流电转换成交流电,通过PWM控制器控制输出电压和电流的波形,实现对交流电的控制。
电位器控制pwm占空比电路

电位器控制pwm占空比电路
电位器控制PWM(脉冲宽度调制)占空比电路是一种常见的电子电路,通常用于调节脉冲信号的占空比。
PWM信号的占空比是指信号周期内高电平所占的比例,通常用百分比表示。
电位器是一种可变电阻,可以通过调节电位器的阻值来控制PWM信号的占空比。
在这种电路中,电位器通常被连接到一个比较器或者运算放大器的输入端,通过调节电位器的阻值,可以改变比较器或运算放大器的阈值,从而影响输出PWM信号的占空比。
当电位器的阻值发生变化时,比较器或运算放大器的输出也会相应地改变,进而调节PWM信号的占空比。
这种电路常用于控制电机的转速、LED灯的亮度调节等场合。
通过调节电位器,可以方便地实现对PWM信号占空比的精准调节,从而达到对电路的精细控制的目的。
需要注意的是,设计这种电路时需要考虑电位器的阻值范围、比较器或运算放大器的工作电压范围、PWM信号的频率等因素,以确保电路能够稳定可靠地工作。
总的来说,电位器控制PWM占空比电路是一种灵活、常用的电子电路,能够实现对PWM信号占空比的精确调节,具有广泛的应用前景。
pwm占空比

PWM占空比1. 介绍脉冲宽度调制(PWM)是一种常用的信号调制技术,广泛应用于电子设备和嵌入式系统中。
PWM信号的关键参数之一就是占空比,它决定了信号的高电平和低电平的时间比例。
本文将详细介绍PWM占空比的概念、计算方法和应用。
2. PWM占空比的定义PWM占空比是指PWM信号中,高电平时间与总周期时间的比例。
通常用百分比表示。
例如,50%的占空比表示高电平时间占总周期时间的一半。
3. PWM占空比的计算方法PWM占空比的计算方法基于以下两个参数:•高电平时间(Ton):信号的高电平持续时间。
•总周期时间(T):信号的完整周期。
根据上述参数,PWM占空比的计算公式如下:PWM占空比 = (Ton / T) * 100%4. PWM占空比的应用PWM占空比在各种电子设备和嵌入式系统中有着广泛的应用,下面列举了几个常见的应用场景:4.1 电机控制PWM占空比被广泛用于电机控制中,特别是直流电机和步进电机。
通过调整PWM占空比,可以控制电机的转速和转向。
较高的PWM占空比将产生较高的平均电压,从而使电机转速增加。
4.2 LED亮度调节PWM占空比也常用于LED亮度调节。
调整PWM占空比可以改变LED的亮度,通过快速的开关控制,人眼会感知到平滑的亮度变化。
较高的PWM占空比将导致更亮的LED光输出。
4.3 电源管理在一些应用中,可以利用PWM占空比来实现电源管理功能。
通过调整PWM占空比,可以实现能量的有效利用和功耗的控制。
例如,某些电源管理芯片使用PWM占空比来控制电池充电电流和输出电压等。
4.4 温度控制PWM占空比还可以用于温度控制。
通过调整PWM占空比,可以控制加热元件(如加热器或风扇)的开关时间。
较高的占空比将提供更多的加热时间或风力,从而控制温度。
5. 总结PWM占空比是脉冲宽度调制中的重要参数,用于控制信号的高低电平时间比例。
通过调整PWM占空比,可以实现各种功能,如电机控制、LED亮度调节、电源管理和温度控制等。
pwm占空比

PWM占空比什么是PWM占空比?PWM(Pulse Width Modulation,脉冲宽度调制)是一种电子技术,用于控制电信号的占空比。
占空比是指信号周期内脉冲的高电平时间与低电平时间之比。
PWM占空比常用来控制电流、电压、功率等。
PWM占空比的计算公式PWM占空比可以用以下公式来计算:占空比 = (高电平时间 / 信号周期) × 100%通常以百分比的形式表示。
例如,一个50%的占空比表示高电平时间和低电平时间相等。
PWM占空比的应用场景PWM占空比广泛应用于各种领域,包括电子、通信、机械控制等。
下面是一些典型的应用场景:1. 电机驱动控制在电机驱动控制中,PWM占空比常用于调整电机的转速和扭矩。
通过改变占空比,可以控制电机的速度和力矩输出。
2. LED调光控制PWM占空比在LED调光控制中被广泛应用。
通过改变占空比,可以调整LED的亮度。
低占空比表示较低的亮度,而高占空比则表示较高的亮度。
3. 电源控制PWM占空比也被用于电源控制,以调整输出电压或电流。
通过改变占空比,可以控制电源的输出功率和稳定性。
PWM占空比的优点使用PWM占空比进行信号调制具有以下优点:1.精确控制:PWM占空比可以实现精确的电信号控制,可以根据需要自由调整占空比,以满足特定的需求。
2.高效能:由于PWM信号只在高电平和低电平之间切换,无需过多的功率消耗,因此具有较高的能量利用效率。
3.灵活性:通过改变占空比,可以调整输出信号的特性,适应不同的应用场景。
示例代码下面是一个使用Python编写的示例代码,用于控制GPIO 输出PWM信号的占空比。
import RPi.GPIO as GPIO# 设置GPIO模式和引脚GPIO.setmode(GPIO.BCM)GPIO.setup(18, GPIO.OUT)# 创建PWM对象,设置频率为1kHzpwm = GPIO.PWM(18, 1000)# 设置占空比为50%pwm.start(50)# 持续运行5秒钟time.sleep(5)# 停止PWM信号pwm.stop()# 清理GPIO引脚GPIO.cleanup()在上面的示例中,我们使用RPi.GPIO库在树莓派上控制GPIO 18引脚的PWM信号。
pwm占空比调制方法-概述说明以及解释

pwm占空比调制方法-概述说明以及解释1.引言1.1 概述概述部分将对本文的主题进行介绍和概括。
本文将探讨PWM(脉宽调制)占空比调制方法的技术原理和应用。
PWM是一种常用的控制技术,通过调整信号的脉冲宽度和周期来实现对信号的稳定控制。
在电子技术领域,PWM被广泛应用于电源控制、电机驱动和LED调光等领域。
PWM的核心思想是通过控制信号的占空比来实现对输出信号的控制。
占空比是指PWM信号中高电平(脉冲宽度)占总周期的比例。
通过调整占空比的大小,在给定的时间内可以精确控制输出信号的强度、功率或周期。
PWM技术具有高效、精确和可靠等优点,使得它成为了现代电子设备中必不可少的一部分。
在本文中,我们将探讨PWM占空比调制方法的技术原理及其不同方法的比较。
不同的PWM调制方法在实际应用中具有各自的特点和适用范围。
我们将对常见的PWM调制方法进行介绍,并比较它们在不同应用场景下的效果和优势。
最后,本文将总结PWM占空比调制方法的特点和应用领域,并对未来的发展做出展望。
随着科技的不断进步,PWM技术将持续发展并找到更广泛的应用。
在新的应用场景下,PWM占空比调制方法将不断优化和改进,以满足不同领域对信号控制的需求。
通过对PWM占空比调制方法的深入研究和探讨,本文旨在为读者提供一个全面的理解和应用该技术的指导。
希望本文能对广大读者在电子技术领域的学习和研究有所帮助,并为相关领域的技术发展做出贡献。
1.2 文章结构本文将分为以下几个部分来探讨PWM占空比调制方法的相关内容。
第一部分将是引言,介绍本文的概述、文章的结构以及研究目的。
在这一部分,我们将提出本文的核心问题,并概括介绍PWM占空比调制方法的背景和研究现状。
第二部分是正文,主要分为三个小节。
2.1小节将对PWM技术进行简介,介绍其基本原理和应用领域,为后续的讨论做铺垫。
2.2小节将详细探讨PWM占空比调制方法,包括常用的几种调制方法的原理和特点。
同时,我们将介绍这些方法在不同情况下的适用性和实际应用。
51单片机pwm占空比程序

51单片机pwm占空比程序摘要:1.51单片机简介2.PWM技术概述3.51单片机PWM占空比程序设计4.程序实现与结果分析正文:1.51单片机简介51单片机是一种经典的8位微控制器,由Intel公司于1981年推出,广泛应用于嵌入式系统领域。
其具有成本低、资源丰富、开发工具成熟等优点,成为众多学习者和工程师的首选。
2.PWM技术概述脉冲宽度调制(PWM)是一种在模拟世界中实现数字控制的方法。
通过改变脉冲的宽度,可以控制输出电压或电流的大小,从而实现对电机、LED亮度等设备的控制。
在51单片机中,可以通过定时器实现PWM信号的生成。
3.51单片机PWM占空比程序设计为了实现51单片机PWM占空比控制,我们需要编写相应的程序。
以下是一个简单的例子:```c#include <reg52.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned intsbit PWM_OUT = P1^0; // 定义PWM输出引脚void Init_PWM(void) // 初始化PWM{TMOD = 0x01; // 定时器0工作在方式1TH0 = (65536 - 45872) / 256; // 计算占空比TL0 = (65536 - 45872) % 256;TR0 = 1; // 启动定时器0}void main(void){Init_PWM(); // 初始化PWMwhile (1){PWM_OUT = 0; // 占空比为1,点亮LED_nop_(); _nop_(); _nop_(); _nop_(); // 消隐期,延时PWM_OUT = 1; // 占空比为0,熄灭LED_nop_(); _nop_(); _nop_(); _nop_(); // 消隐期,延时}}```4.程序实现与结果分析上述程序通过初始化定时器0,设置其工作在方式1,即定时器0的计数值达到TH0和TL0的值时,会触发中断。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
什么就是占空比
占空比(Duty Cycle)在电信领域中意思:
在一串理想的脉冲序列中(如方波),正脉冲的持续时间与脉冲总周期的比值。
例如:脉冲宽度1μs,信号周期4μs的脉冲序列占空比为0、25。
在一段连续工作时间内脉冲占用的时间与总时间的比值。
在CVSD调制(continuously variable slope delta modulation)中,比特“1”的平均比例(未完成)。
在周期型的现象中,现象发生的时间与总时间的比。
负载周期在中文成语中有句话可以形容:「一天捕渔,三天晒网」,则负载周期为0、25。
占空比就是高电平所占周期时间与整个周期时间的比值。
占空比越大,高电平持续的时间越长,电路的开通时间就越长
PWM值增加则占空比减少!!!!!!!(请先瞧下面关于PWM的定义)PWM值增加应该就是周期变大,那么占空比就减小了(此为个人见解如有不同见解请发邮箱1250712643@qq、com)
占空比的图例
什么就是占空比(另一种解释)
占空比就是指高电平在一个周期之内所占的时间比率。
方波的占空比为50%,占空比为0、1,说明正电平所占时间为0、1个周期。
正脉冲的持续时间与脉冲总周期的比值。
例如:正脉冲宽度1μs,信号周期10μs的脉冲序列
占空比为0、1。
什么就是PWM
1、脉冲宽度调制(PWM)就是英文“Pulse Width Modulation”的缩写,简称脉宽调制。
它就是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。
脉冲宽度调制(PWM)就是一种对模拟信号电平进行数字编码的方法。
通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
PWM 信号仍然就是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。
电压或电流源就是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。
通的时候即就是直流供电被加到负载上的时候,断的时候即就是供电被断开的时候。
只要带宽足够,任何模拟值都可以使用PWM进行编码。
2、PWM控制的基本原理
理论基础:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同,就是指环节的输出响应波形基本相同。
低频段非常接近,仅在高频段略有差异。
图1 形状不同而冲量相同的各种窄脉冲
面积等效原理:
分别将如图1所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如图2a所示。
其输出电流i(t)对不同窄脉冲时的响应波形如图2b所示。
从波形可以瞧出,在i(t)的上升段,i(t)
的形状也略有不同,但其下降段则几乎完全相同。
脉冲越窄,各i(t)响应波形的差异也越小。
如果周期性地施加上述脉冲,则响应i(t)也就是周期性的。
用傅里叶级数分解后将可瞧出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。
图2冲量相同的各种窄脉冲的响应波形
3、PWM相关概念
占空比:就就是输出的PWM中,高电平保持的时间与该PWM的时钟周期的时间之比如,一PWM的频率就是1000Hz,那么它的时钟周期就就是1ms,如果高电平出现的时间就是200us,那么低电平的时间肯定就是800us,那么占空比就就是200:1000,也就就是说PWM的占空比就就是1:5。
分辨率:占空比最小能达到的值,如8位的PWM,理论的分辨率就就是1:255(单斜率), 16位的的PWM理论就就是1:65535(单斜率)。
频率:如16位的PWM,它的分辨率达到了1:65535,要达到这个分辨率,T/C就必须从0计数到65535才能达到。
相对于周期就就是65535*计数脉冲时间。
双斜率/ 单斜率:
假设一个PWM从0计数到80,之后又从0计数到80、、、、、、、这个就就是单斜率。
假设一个PWM从0计数到80,之后就是从80计数到0、、、、、、、这个就就是双斜率。
可见,双斜率的计数时间多了一倍,所以输出的PWM频率就慢了一半,但就是分辨率却就是1:(80+80) =1:160,就就是提高了一倍。
假设PWM就是单斜率,设定最高计数就是80,我们再设定一个比较值就是10,那么T/C 从0计数到10时(这时计数器还就是一直往上计数,直到计数到设定值80),单片机就会根据您的设定,控制某个IO口在这个时候就是输出1还就是输出0还就是端口取反,这样,就就是PWM的最基本的原理了。
4、单片机产生PWM
4、1:单片机控制开关电源方式
单片机控制开关电源,单从对电源输出的控制来说,可以有几种控制方式、其一就是单片机输出一个电压(经DA芯片或PWM方式),用作电源的基准电压、这种方式仅仅就是用单片机代替了原来的基准电压,可以用按键输入电源的输出电压值,单片机并没有加入电源的反馈环,电源电路并没有什么改动、这种方式最简单、
其二就是单片机扩展AD,不断检测电源的输出电压,根据电源输出电压与设定值之差,调整DA的输出,控制PWM芯片,间接控制电源的工作、这种方式单片机已加入到电源的反馈环中,代替原来的比较放大环节,单片机的程序要采用比较复杂的PID算法、
其三就是单片机扩展AD,不断检测电源的输出电压,根据电源输出电压与设定值之差,输出PWM波,直接控制电源的工作、这种方式单片机介入电源工作最多、
第三种方式就是最彻底的单片机控制开关电源,但对单片机的要求也最高、要求单片机运算速度快,而且能够输出足够高频率的PWM波、这样的单片机显然价格也高、
4、2:使用单片机产生PWM
MCS51单片机
假设51单片机晶振频率为12MHz。
51单片机内部含有两个16位可编程定时器/计数器,可设置计数器位数16位,13位,8位
计数器位数16,振荡周期12分频后脉冲计数,则计数一次为1us,每个PWM周期为65536us,频率为1*1000000/65536=15Hz。
频率太低,导致开关电源严格的电惯性。
计数器位数13,振荡周期12分频后脉冲计数,则计数一次为1us,每个PWM周期为8192us,频率为1*1000000/8192=122Hz。
音频范围之内,不可忍受。
计数器位数8,振荡周期12分频后脉冲计数,则计数一次为1us,每个PWM周期为256us,频率为1*1000000/256=3906Hz。
音频范围之内,且频率远远低于现阶段开关电源的频率范围。
AVR单片机
AVR单片机采用精简指令集,时钟频率最高为16MHz。
如果PWM分辨率为10位,那么PWM波的频率也就就是开关电源的工作频率为16000000/1024=15625(Hz)。
在音频范围之内,且开关电源工作在这个频率下显然不够。
取PWM分辨率为9位,这次开关电源的工作频率为16000000/512=32768(Hz),在音频范围外,可以用,但距离现代开关电源的工作频率还有一定距离、
不过必须注意,9位分辨率就是说功率管导通-关断这个周期中,可以分成512份,单就导通而言,假定占空比为0、5,则只能分成256份、考虑到脉冲宽度与电源的输出并非线性关系,需要至少再打个对折,也就就是说,电源输出最多只能控制到1/128,无论负载变化还就是网电源电压变化,控制的程度只能到此为止、
还要注意,上面所述只有一个PWM波,就是单端工作、如果要推挽工作(包括半桥),那就需要两个PWM波,上述控制精度还要减半,只能控制到约1/64、对要求不高的电源例如电池充电,可以满足使用要求,但对要求输出精度较高的电源,这就不够了、
综上所述,AVR单片机只能很勉强地使用在直接控制PWM的方式中、
综上,使用单片机产生PWM波形就是远远不够的,因此个人觉得单片机参与的开关电源完全可以胜任第二种工作方式,单片机一方面完成开关芯片的PID控制,一方面完成人机接口。