详解PWM原理、频率与占空比
四种pwm控制技术的原理
四种pwm控制技术的原理
PWM(Pulse Width Modulation,脉宽调制)是一种常用的数字控制技术,用于实现模拟信号的精确控制。
它通过改变信号的脉冲宽度来控制信号的平均电压或电流。
下面是四种常见的PWM控制技术及其原理:
1. 占空比控制:占空比是PWM信号高电平与周期之比。
通过改变占空比可以控制输出信号的平均电压或电流。
占空比越大,输出信号的平均电压或电流越大;占空比越小,输出信号的平均电压或电流越小。
这种方法简单易行,适用于许多应用场合。
2. 脉冲数改变:这种方法通过改变PWM信号每个周期中的脉冲数来控制输出信号的平均电压或电流。
脉冲数越多,输出信号的平均电压或电流越大;脉冲数越少,输出信号的平均电压或电流越小。
脉冲数改变时,周期保持不变。
这种方法常用于需要精确控制输出信号的平均电压或电流的应用。
3. 频率调制:这种方法通过改变PWM信号的频率来控制输出信号的平均电压或电流。
频率越高,输出信号的平均电压或电流越大;频率越低,输出信号的平均电压或电流越小。
输出的平均功率受频率的影响最小,可以实现高效的能量转换。
频率调制一般使用较高的固定占空比。
4. 相位移控制:这种方法通过改变PWM信号相位来控制输出信号的平均电压或电流。
相位移正比于输出信号的平均电压或电流。
相位移控制可以实现交流电源的电压或电流控制,广泛应用于电网有功功率控制和无功功率控制。
这四种PWM控制技术可以根据具体应用的需要选择合适的方式,以实现对输出信号的精确控制。
pwm驱动电机原理

pwm驱动电机原理
PWM(脉冲宽度调制)驱动电机是一种通过调节电源与电机
之间的占空比来控制电机转速的方法。
具体原理如下:
1. PWM信号的生成:通过微控制器或专用PWM发生器产生
一个固定频率的方波信号。
方波的周期是固定的,由电源频率或控制器设定,常用的频率为几十kHz到几百kHz。
2. 占空比的调节:占空比指的是方波中高电平(On)与低电
平(Off)的比例,通常用百分比表示。
通过改变占空比,控
制电平的持续时间,可以调节电机的平均电压和平均电流。
3. 电机速度控制:当占空比较小时,高电平持续时间较短,低电平持续时间较长,平均电压和电流较低,电机转速较慢;当占空比较大时,高电平持续时间较长,低电平持续时间较短,平均电压和电流较高,电机转速较快。
4. 过程控制:通过不断调节占空比,可以实现电机的连续调速。
可以根据需求动态地改变占空比,使电机在不同的工作负载下保持稳定的速度。
5. 低通滤波:为了减少PWM信号中的高频成分对电机的干扰,通常会在PWM信号输出之前添加低通滤波器,以滤除高频噪声。
总之,PWM驱动电机通过调整方波信号的占空比来控制平均
电压和电流,从而实现电机的调速。
这种方法简单可靠,广泛应用于各种电机驱动系统中。
PWM波的原理与应用
PWM波的原理与应用1. 什么是PWM波PWM(Pulse Width Modulation)波是一种脉冲宽度调制技术,通过调节脉冲的宽度来控制信号的平均功率。
PWM波通常由一个周期性的高电平和低电平组成,其中高电平的持续时间被称为脉冲宽度,用占空比来表示。
占空比是高电平时间与周期时间之比,通常以百分比的形式表达。
2. PWM波的原理PWM波的原理基于时间上的分解,通过快速开关电源,将电压变为高频的脉冲波形。
在每个周期内,改变脉冲的宽度来控制电流的大小。
当脉冲宽度较大时,平均电流较大;当脉冲宽度较小时,平均电流较小。
这种方式可以在保持电压不变的情况下,改变负载电流的平均值。
3. PWM波的应用3.1 电机控制PWM波广泛应用于电机控制领域。
通过改变PWM波的占空比,可以调节电机的转速和扭矩。
在调速电机中,通常使用PWM信号来驱动电机,通过改变脉冲宽度,控制电机的转速。
而在电动车、步进电机等控制中,PWM波被用来控制电机的转矩。
3.2 LED调光PWM波也常用于LED照明领域。
由于LED的亮度和电流的关系是非线性的,因此使用PWM波来调整亮度是一种常见的方法。
通过改变PWM的占空比,可以调整LED的亮度,实现灯光的调光效果。
由于PWM波的频率较高,人眼无法感知,因此可以实现无闪烁的调光。
3.3 无线通信PWM波也可以用于无线通信系统中。
在调制解调器中,常使用PWM波来调制信号,将模拟信号转换为数字信号进行传输。
在无线电频率调制中,PWM波也被广泛应用于射频信号的调制。
3.4 电力转换PWM波还被应用于电力转换器中。
由于PWM波可以控制电流的平均值,因此在直流-交流转换器、交流-直流转换器等电力转换器中,PWM技术可以有效地实现能量的高效转换和控制。
4. PWM波的优点•高效率:由于PWM波调整电流的平均值而不是电压,因此可以提高能量利用率。
•简单:PWM技术的实现相对简单,成本较低。
•精确控制:通过调整占空比,可以精确地控制电流、功率等参数。
详解PWM原理、频率与占空比
什么是PWM脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
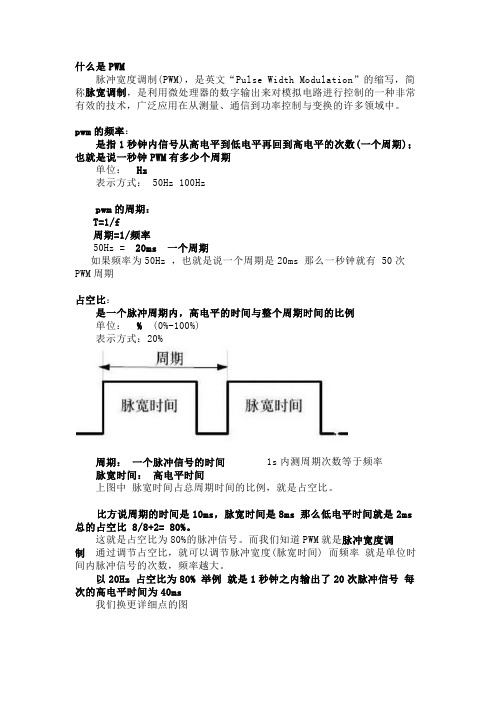
pwm的频率:是指1秒钟内信号从高电平到低电平再回到高电平的次数(一个周期);也就是说一秒钟PWM有多少个周期单位:Hz表示方式: 50Hz 100Hzpwm的周期:T=1/f周期=1/频率50Hz = 20ms一个周期如果频率为50Hz ,也就是说一个周期是20ms 那么一秒钟就有 50次PWM周期占空比:是一个脉冲周期内,高电平的时间与整个周期时间的比例单位:%(0%-100%)表示方式:20%周期:一个脉冲信号的时间1s内测周期次数等于频率脉宽时间:高电平时间上图中脉宽时间占总周期时间的比例,就是占空比。
比方说周期的时间是10ms,脉宽时间是8ms 那么低电平时间就是2ms 总的占空比 8/8+2= 80%。
这就是占空比为80%的脉冲信号。
而我们知道PWM就是脉冲宽度调制通过调节占空比,就可以调节脉冲宽度(脉宽时间) 而频率就是单位时间内脉冲信号的次数,频率越大。
以20Hz 占空比为80% 举例就是1秒钟之内输出了20次脉冲信号每次的高电平时间为40ms我们换更详细点的图上图中,周期为TT1为高电平时间T2 为低电平时间假设周期T为 1s 那么频率就是 1Hz 那么高电平时间0.5s ,低电平时间0.5s 总的占空比就是 0.5 /1 =50%PWM原理以单片机为例,我们知道,单片机的IO口输出的是数字信号,IO口只能输出高电平和低电平。
假设高电平为5V 低电平则为0V 那么我们要输出不同的模拟电压,就要用到PWM,通过改变IO口输出的方波的占空比从而获得使用数字信号模拟成的模拟电压信号。
我们知道,电压是以一种连接1或断开0的重复脉冲序列被夹到模拟负载上去的(例如LED灯,直流电机等),连接即是直流供电输出,断开即是直流供电断开。
pwm的两个参数

pwm的两个参数
PWM(脉宽调制)是现代电子产品中广泛应用的一种信号控制技术,它是通过控制信号的高电平时间和低电平时间的比例来实现对电子设备的控制。
PWM有两个重要参数,分别是频率和占空比,下面我们将详细介绍这两个参数及其作用。
一、PWM的频率
PWM的频率指的是PWM信号在单位时间内的震荡次数,单位为赫兹(Hz)。
PWM信号频率越高,它所携带的信息就越多,控制的精度也越高。
然而,频率也不能太高,因为高频率会导致噪声和能量损耗增加,同时还会增加硬件复杂度和成本。
在实际应用中,PWM信号的频率通常比较固定,一般为几千赫兹或数十千赫兹,以确保设备的稳定性和可靠性。
当需要控制设备时,需要根据设备的具体要求选择合适的频率。
二、PWM的占空比
PWM的占空比指的是PWM信号高电平时间与整个周期时间的比例。
换句话说,PWM的占空比是指PWM波形中高电平时间所占的比例。
占空比的变化会导致PWM信号的能量变化,从而影响被控制的设备的工作状态。
在智能家居中,灯泡的亮度、电子大门的打开角度、电机的旋转速度等都可以通过PWM的占空比来控制。
占空比越大,被控制设备的作用越强,反之则越弱。
另外,PWM的占空比还可以用于控制能量消耗。
例如,当控制设备处于闲置状态时,可以通过将占空比降到零来降低能耗,以达到节能的目的。
综上所述,PWM的两个参数(频率和占空比)是实现现代电子设备控制的重要因素,通过控制这两个参数,可以实现对设备的方方面面的精确控制。
在实际应用中,我们需要根据被控制设备的要求来选择合适的PWM参数,以实现最佳的控制效果。
pwm占空比调制方法-概述说明以及解释

pwm占空比调制方法-概述说明以及解释1.引言1.1 概述概述部分将对本文的主题进行介绍和概括。
本文将探讨PWM(脉宽调制)占空比调制方法的技术原理和应用。
PWM是一种常用的控制技术,通过调整信号的脉冲宽度和周期来实现对信号的稳定控制。
在电子技术领域,PWM被广泛应用于电源控制、电机驱动和LED调光等领域。
PWM的核心思想是通过控制信号的占空比来实现对输出信号的控制。
占空比是指PWM信号中高电平(脉冲宽度)占总周期的比例。
通过调整占空比的大小,在给定的时间内可以精确控制输出信号的强度、功率或周期。
PWM技术具有高效、精确和可靠等优点,使得它成为了现代电子设备中必不可少的一部分。
在本文中,我们将探讨PWM占空比调制方法的技术原理及其不同方法的比较。
不同的PWM调制方法在实际应用中具有各自的特点和适用范围。
我们将对常见的PWM调制方法进行介绍,并比较它们在不同应用场景下的效果和优势。
最后,本文将总结PWM占空比调制方法的特点和应用领域,并对未来的发展做出展望。
随着科技的不断进步,PWM技术将持续发展并找到更广泛的应用。
在新的应用场景下,PWM占空比调制方法将不断优化和改进,以满足不同领域对信号控制的需求。
通过对PWM占空比调制方法的深入研究和探讨,本文旨在为读者提供一个全面的理解和应用该技术的指导。
希望本文能对广大读者在电子技术领域的学习和研究有所帮助,并为相关领域的技术发展做出贡献。
1.2 文章结构本文将分为以下几个部分来探讨PWM占空比调制方法的相关内容。
第一部分将是引言,介绍本文的概述、文章的结构以及研究目的。
在这一部分,我们将提出本文的核心问题,并概括介绍PWM占空比调制方法的背景和研究现状。
第二部分是正文,主要分为三个小节。
2.1小节将对PWM技术进行简介,介绍其基本原理和应用领域,为后续的讨论做铺垫。
2.2小节将详细探讨PWM占空比调制方法,包括常用的几种调制方法的原理和特点。
同时,我们将介绍这些方法在不同情况下的适用性和实际应用。
pwm工作原理

pwm工作原理PWM工作原理PWM(Pulse Width Modulation)是一种通过控制信号的占空比来控制电路输出的技术。
在电子设计中,PWM被广泛应用于调节电压、控制电机转速、LED亮度调节等方面。
本文将详细介绍PWM的工作原理。
一、PWM的基本概念1.1 占空比占空比是指在一个周期内,信号高电平所占的时间与整个周期时间之比。
通常用百分数表示。
例如,50%的占空比表示高电平持续时间为整个周期时间的一半。
1.2 周期周期是指信号从一个状态到另一个状态所需的时间,通常以秒为单位。
例如,100Hz的信号周期为10ms。
1.3 频率频率是指信号在单位时间内从一个状态到另一个状态的次数,通常以赫兹(Hz)为单位。
例如,100Hz的信号频率为100次/秒。
二、PWM输出原理2.1 PWM输出波形PWM输出波形是由高电平和低电平两种状态交替组成的方波信号。
其中,高电平持续时间与低电平持续时间之比即为占空比。
2.2 PWM输出控制方法在实际应用中,通过改变控制器输出引脚的电平来控制PWM输出波形。
当输出引脚为高电平时,输出信号为高电平;当输出引脚为低电平时,输出信号为低电平。
通过改变高电平和低电平持续时间的比例,可以改变PWM输出波形的占空比。
2.3 PWM输出频率PWM输出频率是由控制器内部时钟和预设参数决定的。
通常情况下,PWM输出频率越高,控制精度越高,但是也会增加系统负担。
三、PWM控制原理3.1 PWM控制器PWM控制器是一种能够产生PWM波形的芯片或模块。
它通常由计数器、比较器、触发器等模块组成。
3.2 PWM计数器PWM计数器是用来产生周期性信号的模块。
它通常由一个可编程计数寄存器和一个时钟源组成。
在每个时钟周期内,计数寄存器中的值会自动加1,并与预设值进行比较。
3.3 PWM比较器PWM比较器是用来产生占空比的模块。
它通常由一个可编程比较寄存器和一个参考信号(如DAC)组成。
在每个时钟周期结束后,计数寄存器中的值会与比较寄存器进行比较,如果计数器的值小于等于比较器的值,则输出高电平;否则输出低电平。
pwm控制工作原理

pwm控制工作原理
PWM(Pulse Width Modulation)控制是一种通过调节信号的
脉冲宽度来控制输出电压或电流的技术。
它可以通过快速的开关操作将输入电压分成一系列的脉冲,并通过调节每个脉冲的宽度来控制输出。
这些脉冲可以由数字信号或模拟信号产生。
PWM控制的工作原理如下:
1. 产生模拟信号:首先,需要产生一个模拟信号,它可以是用于控制的输入信号,也可以是需要进行控制的电压或电流信号。
2. 设定PWM频率:根据需要,设定一个PWM的工作频率。
频率决定了脉冲的数量,以及宽度的调节范围。
3. 设定占空比:占空比是指高电平(脉冲宽度)占总周期的比例。
通过改变占空比,可以调节输出的电压或电流。
4. 脉冲生成:根据设定的PWM频率和占空比,产生一系列的
脉冲信号。
脉冲的宽度决定了输出信号的大小。
5. 输出滤波:PWM控制器输出的信号是一个脉冲信号,为了
使输出信号更加平滑,需要进行滤波处理。
常用的滤波器有低通滤波器,将脉冲信号转化为模拟信号。
6. 控制输出:将滤波后的信号传递给需要控制的设备,如电机、灯光等。
通过调节PWM信号的占空比,可以控制设备的输出
电压或电流。
总结起来,PWM控制利用脉冲信号的频率和占空比来控制输出电压或电流的大小。
通过快速的开关操作,可以模拟出连续电压或电流,并且具有精确控制的能力。
这种控制方式在电机驱动、电源调节等领域得到广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
什么是PWM
脉冲宽度调制(PWM) 是英文"Pulse Width Modulation"的缩写,简 称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常 有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
pwm 的频率:
是指1秒钟内信号从高电平到低电平再回到高电平的次数(一个周期); 也就是说一秒钟PWM 有多少个周期
单位:Hz
表示方式S 50Hz lOOHz
pwm 的周期J
T=l/f
周期二1/频率
50Hz = 20ms —个周期
如果频率为50Hz ,也就是说一个周期是20ms 那么一秒钟就有50次 PWM 周期 占空比:
是一个脉冲周期内,高电平的时间与整个周期时间的比例
单位: % (0%-100%)
表示方式S 20%
周期
周期:一个脉冲信号的时间 脉宽时
间:高电平时间 上图中 脉宽时间占
总周期时间的比例,就是占空比。
比方说周期的时间是10ms,脉宽时间是8nis 那么低电平时间就是2nis 总的占空比8/8+2= 80%.
这就是占空比为80%的脉冲信号。
而我们知道PWM 就是脉冲宽度调 制通过调节占空比,就可以调节脉冲宽度(脉宽时间)而频率就是单位时 间内脉冲信号的次数,频率越大。
以20HZ 占空比为80%举例 就是1秒钟之内输出了 20次脉冲信号 每 次的高电平时间为40ms
我们换更详细点的图
脉宽时间
脉宽吋间
1S 内测周期次数等于频率
50% 50%
上图中,周期为T
T1为高电平时间
T2为低电平时间
假设周期T为1S那么频率就是IHz那么高电平时间0.5s ,低电平时间0・5s总的占空比就是0.5 /I =50%
PVM 原
以单片机为例,我们知道,单片机的10 口输出的是数字信号,10 口只
能输出高电平和低电平。
假设高电平为5V低电平则为0V那么我们要输出不同的模拟电压,就要用到PWM,通过改变10 口输出的方波的占空比从而获得使用数字信号模拟成的模拟电压信号。
我们知道,电压是以一种连接1或断开0的巫复脉冲存列被夹到模拟负载上去的(例如LED灯,直流电机等),连接即是直流供电输出,断开即是直流供电断开。
通过对连接和断开时间的控制,理论上来讲,可以输出任意不大于最大电压值(即O'SV之间任意大小)的模拟电压。
比方说占空比为50%那就是高电平时间一半,低电平时间一半,在一定的频率下,就可以得到模拟的2. 5V输出电压那么75%的占空比得到的电圧就是3. 75Vo
20% S0H 20% 86% 20%
pwm 的调节作用来源于对“占周期”的宽度控制,“占周期”变宽,输 出的能量就会提高,通过阻容变换电路所得到的平均电压值也会上升,“占 周期”变窄,输出的电压信号的电压平均值就会降低,通过阻容变换电路所 得到的平均电压值也会下降。
也就是,在一定的频率下,通过不同的占空比 即可得到不同的输出模拟电压。
pvm 就是通过这种原理实现D/A 转换的。
总结:
PWM 就是在合适的信号频率下,通过一个周期里改变占空比的方式来改 变输出的有效电压。
PWM 频率越大,相应越快,
PffM 输出呼吸灯
那么,PWH 信号的实际作用是什么呢?
我们以经常使用的呼吸灯举例:
一般人眼睛对于80Hz 以上刷新频率则完全没有闪烁感。
频率太小的话 看起来就会闪烁。
那么我们平时见到的LED 灯,当它的 频率大于50Hz 的时候,人眼就会产生视觉暂留效果,基本就看不到闪烁了, 而是一个常亮的LED 灯,你在1秒内,高电平0.O 秒,低电平0.O 秒,(频 率IHz )如此反复,那么你看到的电灯就会闪烁,但是如果是10毫秒内,5 毫秒打开,5毫秒关闭,(频率lOOHz )这时候灯光的亮灭速度赶不上开关速 度(LED 灯还没完全亮就乂熄灭了),山于视觉暂留作用 人眼不感觉电灯在闪 烁,而是感觉灯的亮度少了因为高电平时间(占空比)为50%亮度也就为之 前的50% , 频率很高时,看不到闪烁,占空比越大,LED 越亮; 频率很低时,可看到闪烁,占空比越大,LED 越亮。
所以,在频率一定下,可以用不同占空比改变LED 灯的亮度。
使其达 到一个呼吸灯的效果。
PWM 对电机转速的控制
占空比可以实现对电机转速的调节,我们知道,占空比是高电平在一个 周期之中的比值,高电平的所占的比值越大,占空比就越大,对于直流电机 来讲,电机输出端引脚是高电平电机就可以转动,当输出端高电平时,电机 会转动,但是是一点一点的提速,在高电平突然转向低电平时,电机山于电
5V ov
2.5V
5V ov
3.75V
5V
肠 5W4 ,0% $0% 75% 25% 75% 25% T5% 25%
感有防止电流突变的作用是不会停止的,会保持这原有的转速,以此往复, 电机的转速就是周期内输出的平均电压值,所以实质上我们调速是将电机处 于一种,似停非停,似全速转动乂非全速转动的状态,那么在一个周期的平 均速度就是我们占空比调出来的速度了,在电机控制中,电压越大,电机转 速越快,而通过PWH 输出不同的模拟电压,便可以使电机达到不同的输出转 速。
当然,在电机控制中,不同的电机都有其适应的频率 频率太低会导致 运动不稳定,如果频率刚好在人耳听觉范圉,有时还会听到呼啸声。
频率太 高的电机可能反应不过来。
正常的电机频率在6-16kHZ 之间为好
PWM 对舵机的控制
舵机的控制就是通过一个固定的频率,给其不同的占空比的,来控制舵 机不同的转角舵机的频率一般为频率为50HZ,也就是一个20ms 左右的时基 脉冲,而脉冲的高电平部分一般0. 5ms-2. 5ms 范来控制舵机不同的转 角。
500-
2500US 的PWM i 自i 电平部分对应控制180度舵机的0-180度 以180度角度伺服为例,那么对应的控制关系是这样的:
度 O 一 5S m 5 ♦ O 5 O
3 8S m 5度
度度
度
O 9
输入倍号脉冲宽度 (周期为20ms )
舵机输出轴转角
0・。