三维立体图及答案
2018年高考数学江苏专版三维二轮专题复习教学案:专题二 立体几何 Word版含答案

江苏 新高考高考对本专题内容的考查一般是“一小一大”,小题主要考查体积和表面积的计算问题,而大题主要证明线线、线面、面面的平行与垂直问题,其考查形式单一,难度一般.第1课时立体几何中的计算(基础课) [常考题型突破]空间几何体的几组常用公式(1)柱体、锥体、台体的侧面积公式: ①S 柱侧=ch (c 为底面周长,h 为高); ②S 锥侧=12ch ′(c 为底面周长,h ′为斜高);③S 台侧=12(c +c ′)h ′(c ′,c 分别为上下底面的周长,h ′为斜高).(2)柱体、锥体、台体的体积公式: ①V 柱体=Sh (S 为底面面积,h 为高); ②V 锥体=13Sh (S 为底面面积,h 为高);③V 台=13(S +SS ′+S ′)h (不要求记忆).(3)球的表面积和体积公式: ①S 球=4πR 2(R 为球的半径); ②V 球=43πR 3(R 为球的半径).[题组练透]1.现有一个底面半径为3 cm ,母线长为5 cm 的圆锥状实心铁器,将其高温熔化后铸成一个实心铁球(不计损耗),则该铁球的半径为________cm.解析:因为圆锥底面半径为3 cm ,母线长为5 cm ,所以圆锥的高为52-32=4 cm ,其体积为13π×32×4=12π cm 3,设铁球的半径为r ,则43πr 3=12π,所以该铁球的半径是39cm.答案:392.(2017·苏锡常镇二模)已知直四棱柱底面是边长为2的菱形,侧面对角线的长为23,则该直四棱柱的侧面积为________.解析:由题意得,直四棱柱的侧棱长为(23)2-22=22,所以该直四棱柱的侧面积为S =cl =4×2×22=16 2.答案:16 23.(2017·南通、泰州一调)如图,在正四棱柱ABCD -A 1B 1C 1D 1中,AB =3 cm ,AA 1=1 cm ,则三棱锥D 1-A 1BD 的体积为_______cm 3.解析:三棱锥D 1-A 1BD 的体积等于三棱锥B -A 1D 1D 的体积,因为三棱锥B -A 1D 1D 的高等于AB ,△A 1D 1D 的面积为矩形AA 1D 1D 的面积的12,所以三棱锥B -A 1D 1D 的体积是正四棱柱ABCD -A 1B 1C 1D 1的体积的16,所以三棱锥D 1-A 1BD 的体积等于16×32×1=32.答案:324.如图所示是一个直三棱柱(以A 1B 1C 1为底面)被一个平面所截得到的几何体,截面为ABC ,已知A 1B 1=B 1C 1=1,∠A 1B 1C 1=90°,A 1A =4,B 1B =2,C 1C =3,则此几何体的体积为________.解析:在A 1A 上取点A 2,在C 1C 上取点C 2,使A 1A 2=C 1C 2=BB 1,连结A 2B ,BC 2,A 2C 2,∴V =VA B C A BC 11122-+VB A ACC 22-=12×1×1×2+13×(1+2)2×2×22=32. 答案:325.设甲,乙两个圆柱的底面积分别为S 1,S 2,体积分别为V 1,V 2.若它们的侧面积相等且V 1V 2=32,则S 1S 2的值是________.解析:设甲,乙两个圆柱的底面半径分别为r 1,r 2,高分别为h 1,h 2,则有2πr 1h 1=2πr 2h 2,即r 1h 1=r 2h 2,又V 1V 2=πr 21h 1πr 22h 2,∴V 1V 2=r 1r 2,∴r 1r 2=32,则S 1S 2=⎝⎛⎭⎫r 1r 22=94.答案:94[方法归纳]解决球与其他几何体的切、接问题(1)解题的关键:仔细观察、分析,弄清相关元素的位置关系和数量关系.(2)选准最佳角度作出截面:要使这个截面尽可能多地包含球、几何体的各种元素以及体现这些元素之间的关系,达到空间问题平面化的目的.(3)认识球与正方体组合的3种特殊截面:(4)熟记2个结论:①设小圆O 1半径为r ,OO 1=d ,则d 2+r 2=R 2;②若A ,B 是圆O 1上两点,则AB =2r sin ∠AO 1B 2=2R sin ∠AOB 2.[题组练透]1.(2017·江苏高考)如图,在圆柱O 1O 2内有一个球O ,该球与圆柱的上、下底面及母线均相切.记圆柱O 1O 2的体积为V 1,球O 的体积为V 2,则V 1V 2的值是________.解析:设球O 的半径为R ,因为球O 与圆柱O 1O 2的上、下底面及母线均相切,所以圆柱的底面半径为R 、高为2R ,所以V 1V 2=πR 2·2R 43πR 3=32.答案:322.(2017·全国卷Ⅲ改编)已知圆柱的高为1,它的两个底面的圆周在直径为2的同一个球的球面上,则该圆柱的体积为________.解析:设圆柱的底面半径为r ,则r 2=12-⎝⎛⎭⎫122=34,所以圆柱的体积V =34×π×1=3π4.答案:3π43.已知矩形ABCD的顶点都在半径为2的球O的球面上,且AB=3,BC=3,过点D作DE垂直于平面ABCD,交球O于E,则棱锥E-ABCD的体积为________.解析:如图所示,BE过球心O,∴DE=42-32-(3)2=2,∴V E -ABCD=13×3×3×2=2 3.答案:2 34.(2017·南京、盐城一模)将矩形ABCD绕边AB旋转一周得到一个圆柱,AB=3,BC =2,圆柱上底面圆心为O,△EFG为下底面圆的一个内接直角三角形,则三棱锥O-EFG 体积的最大值是________.解析:因为将矩形ABCD绕边AB旋转一周得到一个圆柱,AB=3,BC=2,圆柱上底面圆心为O,△EFG为下底面圆的一个内接直角三角形,所以三棱锥O-EFG的高为圆柱的高,即高为AB,所以当三棱锥O-EFG体积取最大值时,△EFG的面积最大,当EF为直径,且G在EF的垂直平分线上时,(S△EFG)max=12×4×2=4,所以三棱锥O-EFG体积的最大值(V O-EFG)max=13×(S△EFG)max×AB=13×4×3=4.答案:4[方法归纳]多面体与球的切接问题的解题技巧[必备知识]将平面图形沿其中一条或几条线段折起,使其成为空间图形,把这类问题称为平面图形的翻折问题.平面图形经过翻折成为空间图形后,原有的性质有的发生了变化,有的没有发生变化,弄清它们是解决问题的关键.一般地,翻折后还在同一个平面上的性质不发生变化,不在同一个平面上的性质发生变化.解决这类问题就是要据此研究翻折以后的空间图形中的线面关系和几何量的度量值,这是化解翻折问题难点的主要方法.[题组练透]1.(2017·南通三模)已知圆锥的侧面展开图是半径为3,圆心角为2π3的扇形,则这个圆锥的高为________.解析:因为圆锥的侧面展开图是半径为3,圆心角为2π3的扇形,所以圆锥的母线长l =3,设圆锥的底面半径为r ,则底面周长2πr =3×2π3,所以r =1,所以圆锥的高为32-12=2 2. 答案:2 22.(2017·南京考前模拟)如图,正△ABC 的边长为2,CD 是AB 边上的高,E ,F 分别为边AC 与BC 的中点,现将△ABC 沿CD 翻折,使平面ADC ⊥平面DCB ,则棱锥E -DFC 的体积为________.解析:S △DFC =14S △ABC =14×⎝⎛⎭⎫34×22=34,E 到平面DFC 的距离h 等于12AD =12. V E -DFC =13×S △DFC×h =324. 答案:3243.(2017·全国卷Ⅰ)如图,圆形纸片的圆心为O ,半径为5 cm ,该纸片上的等边三角形ABC 的中心为O .D ,E ,F 为圆O 上的点,△DBC ,△ECA ,△FAB 分别是以BC ,CA ,AB 为底边的等腰三角形.沿虚线剪开后,分别以BC ,CA ,AB 为折痕折起△DBC ,△ECA ,△FAB ,使得D ,E ,F 重合,得到三棱锥.当△ABC 的边长变化时,所得三棱锥体积(单位:cm 3)的最大值为________.解析:法一:由题意可知,折起后所得三棱锥为正三棱锥,当△ABC 的边长变化时, 设△ABC 的边长为a (a >0)cm , 则△ABC 的面积为34a 2,△DBC 的高为5-36a , 则正三棱锥的高为⎝⎛⎭⎫5-36a 2-⎝⎛⎭⎫36a 2=25-533a , ∴25-533a >0, ∴0<a <53,∴所得三棱锥的体积V =13×34a 2×25-533a =312× 25a 4-533a 5. 令t =25a 4-533a 5,则t ′=100a 3-2533a 4, 由t ′=0,得a =43,此时所得三棱锥的体积最大,为415 cm 3.法二:如图,连接OD 交BC 于点G ,由题意知,OD ⊥BC .易得OG=36BC , 设OG =x ,则BC =23x ,DG =5-x ,S △ABC =12×23x ×3x =33x 2,故所得三棱锥的体积V =13×33x 2×(5-x )2-x 2=3x 2×25-10x =3×25x 4-10x 5.令f (x )=25x 4-10x 5,x ∈⎝⎛⎭⎫0,52, 则f ′(x )=100x 3-50x 4,令f ′(x )>0,即x 4-2x 3<0,得0<x <2, 则当x ∈⎝⎛⎭⎫0,52时,f (x )≤f (2)=80, ∴V ≤3×80=415.∴所求三棱锥的体积的最大值为415. 答案:415 [方法归纳][A 组——抓牢中档小题]1.已知正方体ABCD -A 1B 1C 1D 1的棱长为1,点E 是棱B 1B 的中点,则三棱锥B 1-ADE 的体积为________.解析:VB 1-ADE =VD -AEB 1=13S △AEB 1·DA =13×12×12×1×1=112.答案:1122.若两球表面积之比是4∶9,则其体积之比为________.解析:设两球半径分别为r 1,r 2,因为4πr 21∶4πr 22=4∶9,所以r 1∶r 2=2∶3,所以两球体积之比为43πr 31∶43πr 32=⎝⎛⎭⎫r 1r 23=⎝⎛⎭⎫233=8∶27.答案:8∶273.(2017·天津高考)已知一个正方体的所有顶点在一个球面上,若这个正方体的表面积为18,则这个球的体积为________.解析:设正方体的棱长为a ,则6a 2=18,得a =3,设该正方体外接球的半径为R ,则2R =3a =3,得R =32,所以该球的体积为43πR 3=4π3×278=92π.答案:92π4.已知圆锥的母线长为10 cm ,侧面积为60π cm 2,则此圆锥的体积为________cm 3. 解析:设圆锥底面圆的半径为r ,母线长为l ,则侧面积为πrl =10πr =60π,解得r =6,则圆锥的高h =l 2-r 2=8,则此圆锥的体积为13πr 2h =13π×36×8=96π.答案:96π5.(2017·扬州期末)若正四棱锥的底面边长为2(单位:cm),侧面积为8(单位:cm 2),则它的体积为________(单位:cm 3).解析:因为正四棱锥的底面边长为2,侧面积为8,所以底面周长c =8,12ch ′=8,所以斜高h ′=2,正四棱锥的高为h =3,所以正四棱锥的体积为13×22×3=433.答案:4336.设棱长为a 的正方体的体积和表面积分别为V 1,S 1,底面半径和高均为r 的圆锥的体积和侧面积分别为V 2,S 2,若V 1V 2=3π,则S 1S 2的值为________. 解析:由题意知,V 1=a 3,S 1=6a 2,V 2=13πr 3,S 2=2πr 2,由V 1V 2=3π得,a 313πr 3=3π,得a=r ,从而S 1S 2=62π=32π.答案:32π7.(2017·苏北三市三模)如图,在正三棱柱ABC -A1B 1C 1中,已知AB =AA 1=3,点P 在棱CC 1上,则三棱锥P -ABA 1的体积为________.解析:三棱锥的底面积S △ABA 1=12×3×3=92,点P 到底面的距离为△ABC 的高h =32-⎝⎛⎭⎫322=332,故三棱锥的体积VP -ABA 1=13S △ABA 1×h =934. 答案:9348.(2017·无锡期末)已知圆锥的侧面展开图为一个圆心角为2π3,且面积为3π的扇形,则该圆锥的体积等于________.解析:设圆锥的母线为l ,底面半径为r , 因为3π=13πl 2,所以l =3,所以πr ×3=3π,所以r =1,所以圆锥的高是32-12=22,所以圆锥的体积是13×π×12×22=22π3.答案:22π39.(2017·徐州古邳中学摸底)表面积为24π的圆柱,当其体积最大时,该圆柱的底面半径与高的比为________.解析:设圆柱的高为h ,底面半径为r , 则圆柱的表面积S =2πr 2+2πrh =24π, 即r 2+rh =12,得rh =12-r 2, ∴V =πr 2h =πr (12-r 2)=π(12r -r 3), 令V ′=π(12-3r 2)=0,得r =2,∴函数V =πr 2h 在区间(0,2]上单调递增,在区间[2,+∞)上单调递减,∴r =2时,V 最大,此时2h =12-4=8,即h =4,r h =12.答案:1210.三棱锥P -ABC 中,PA ⊥平面ABC ,AC ⊥BC ,AC =BC =1,PA =3,则该三棱锥外接球的表面积为________.解析:把三棱锥P -ABC 看作由平面截一个长、宽、高分别为1、1、3的长方体所得的一部分(如图).易知该三棱锥的外接球就是对应长方体的外接球.又长方体的体对角线长为12+12+(3)2=5,故外接球半径为52,表面积为4π×⎝⎛⎭⎫522=5π. 答案:5π11.已知正三棱锥P -ABC 的体积为223,底面边长为2,则侧棱PA 的长为________.解析:设底面正三角形ABC 的中心为O ,又底面边长为2,故OA =233,由V P -ABC =13PO ·S △ABC ,得223=13PO ×34×22,PO =263,所以PA =PO 2+AO 2=2. 答案:212.(2017·苏州期末)一个长方体的三条棱长分别为3,8,9,若在该长方体上面钻一个圆柱形的孔后其表面积没有变化,则圆孔的半径为________.解析:圆柱两底面积等于圆柱的侧面积.孔的打法有三种,所以有三种情况:①孔高为3,则2πr 2=2πr ×3,解得r =3;②孔高为8,则r =8;③孔高为9,则r =9.而实际情况是,当r =8,r =9时,因为长方体有个棱长为3,所以受限制不能打,所以只有①符合.答案:313.如图所示,在体积为9的长方体ABCD -A 1B 1C 1D 1中,对角线B 1D 与平面A 1BC 1交于点E ,则四棱锥E -A 1B 1C 1D 1的体积V =________.解析:连结B 1D 1交A 1C 1于点F ,连结BD ,BF ,则平面A 1BC 1∩平面BDD 1B 1=BF ,因为E ∈平面A 1BC 1,E ∈平面BDD 1B 1,所以E ∈BF .因为F 是A 1C 1的中点,所以BF 是中线,又B 1F 綊12BD ,所以FE EB =12,故点E 到平面A 1B 1C 1D 1的距离是BB 1的13,所以四棱锥E -A 1B 1C 1D 1的体积V =13×S 四边形A 1B 1C 1D 1×13BB 1=19V 长方体ABCD -A 1B 1C 1D 1=1.答案:114.半径为2的球O 中有一内接正四棱柱(底面是正方形,侧棱垂直底面).当该正四棱柱的侧面积最大时,球的表面积与该正四棱柱的侧面积之差是________.解析:依题意,设球的内接正四棱柱的底面边长为a 、高为h ,则有16=2a 2+h 2≥22ah ,即4ah ≤162,该正四棱柱的侧面积S =4ah ≤162,当且仅当h =2a =22时取等号.因此,当该正四棱柱的侧面积最大时,球的表面积与该正四棱柱的侧面积之差是4π×22-162=16(π-2).答案:16(π-2)[B 组——力争难度小题]1.已知三棱锥S -ABC 所在顶点都在球O 的球面上,且SC ⊥平面ABC ,若SC =AB =AC =1,∠BAC =120°,则球O 的表面积为________.解析:∵AB =AC =1,∠BAC =120°, ∴BC =12+12-2×1×1×⎝⎛⎭⎫-12=3, ∴三角形ABC 的外接圆直径2r =3sin 120°=2,∴r =1.∵SC ⊥平面ABC ,SC =1, ∴该三棱锥的外接球半径R =r 2+⎝⎛⎭⎫SC 22=52,∴球O 的表面积S =4πR 2=5π. 答案:5π2.(2017·南京三模)如图,在直三棱柱ABC -A1B 1C 1中,AB =1,BC =2,BB 1=3,∠ABC =90°,点D 为侧棱BB 1上的动点.当AD +DC 1最小时,三棱锥D -ABC 1的体积为________.解析:在直三棱柱ABC -A 1B 1C 1中,BB 1⊥平面ABC ,所以BB 1⊥AB ,又因为∠ABC =90°,即BC ⊥AB ,又BC ∩BB 1=B ,所以AB ⊥平面BB 1C 1C, 因为AB =1,BC =2,点D 为侧棱BB 1上的动点,所以侧面展开,当AD +DC 1最小时,BD =1,所以S △BDC 1=12×BD ×B 1C 1=1,所以三棱锥D -ABC 1的体积为13×S △BDC 1×AB =13.答案:133.设四面体的六条棱的长分别为1,1,1,1,2和a ,且长为a 的棱与长为2的棱异面,则a 的取值范围是________.解析:如图所示,AB =2,CD =a ,设点E 为AB 的中点,则ED ⊥AB,EC⊥AB,则ED=AD2-AE2=22,同理EC=22.由构成三角形的条件知0<a<ED+EC=2,所以0<a< 2.答案:(0,2)4.如图,已知AB为圆O的直径,C为圆上一动点,PA⊥圆O所在的平面,且PA=AB=2,过点A作平面α⊥PB,分别交PB,PC于E,F,当三棱锥P-AEF的体积最大时,tan∠BAC=________.解析:∵PB⊥平面AEF,∴AF⊥PB.又AC⊥BC,AP⊥BC,∴BC⊥平面PAC,∴AF⊥BC,∴AF⊥平面PBC,∴∠AFE=90°.设∠BAC=θ,在Rt△PAC中,AF=AP·ACPC=2×2cos θ21+cos2θ=2cos θ1+cos2θ,在Rt△PAB中,AE=PE=2,∴EF=AE2-AF2,∴V P-AEF=16AF·EF·PE=16AF·2-AF2·2=26·2AF2-AF4=26·-(AF2-1)2+1≤26,∴当AF=1时,V P-AEF取得最大值26,此时AF=2cos θ1+cos2θ=1,∴cos θ=13,sin θ=23,∴tan θ= 2.答案: 2第2课时平行与垂直(能力课) [常考题型突破][例1](2017·江苏高考)如图,在三棱锥A-BCD中,AB⊥AD,BC⊥BD,平面ABD⊥平面BCD,点E,F(E与A,D不重合)分别在棱AD,BD上,且EF⊥AD.求证:(1)EF∥平面ABC;(2)AD⊥AC.[证明] (1)在平面ABD 内,因为AB ⊥AD ,EF ⊥AD ,所以EF ∥AB .又因为EF ⊄平面ABC ,AB ⊂平面ABC ,所以EF ∥平面ABC .(2)因为平面ABD ⊥平面BCD ,平面ABD ∩平面BCD =BD ,BC ⊂平面BCD ,BC ⊥BD ,所以BC ⊥平面ABD .因为AD ⊂平面ABD ,所以BC ⊥AD .又AB ⊥AD ,BC ∩AB =B ,AB ⊂平面ABC ,BC ⊂平面ABC ,所以AD ⊥平面ABC .又因为AC ⊂平面ABC ,所以AD ⊥AC .[方法归纳]1.(2017·苏锡常镇一模)如图,在斜三棱柱ABC -A1B 1C 1中,侧面AA 1C 1C是菱形,AC 1与A 1C 交于点O ,E 是棱AB 上一点,且OE ∥平面BCC 1B 1.(1)求证:E 是AB 的中点;(2)若AC 1⊥A 1B ,求证:AC 1⊥BC .证明:(1)连结BC1,因为OE ∥平面BCC 1B 1,OE ⊂平面ABC 1,平面BCC 1B 1∩平面ABC 1=BC 1,所以OE ∥BC 1 .因为侧面AA 1C 1C 是菱形,AC 1∩A 1C =O ,所以O 是AC 1中点,所以AE EB =AO OC 1=1,E 是AB 的中点. (2)因为侧面AA 1C 1C 是菱形,所以AC 1⊥A 1C,又AC1⊥A1B,A1C∩A1B=A1,A1C⊂平面A1BC,A1B⊂平面A1BC,所以AC1⊥平面A1BC,因为BC⊂平面A1BC,所以AC1⊥BC.2.(2017·苏州模拟)在如图所示的空间几何体ABCDPE中,底面ABCD是边长为4的正方形,PA⊥平面ABCD,PA∥EB,且PA=AD=4,EB=2.(1)若点Q是PD的中点,求证:AQ⊥平面PCD;(2)证明:BD∥平面PEC.证明:(1)因为PA=AD,Q是PD的中点,所以AQ⊥PD.又PA⊥平面ABCD,所以CD⊥PA.又CD⊥DA,PA∩DA=A,所以CD⊥平面ADP.又因为AQ⊂平面ADP,所以CD⊥AQ,又PD∩CD=D,所以AQ⊥平面PCD.(2)取PC的中点M,连结AC交BD于点N,连结MN,ME,在△PAC中,易知MN=12PA,MN∥PA,又PA∥EB,EB=12PA,所以MN=EB,MN∥EB,所以四边形BEMN是平行四边形,所以EM∥BN.又EM⊂平面PEC,BN⊄平面PEC,所以BN∥平面PEC,即BD∥平面PEC.[例2]ABC内接于圆O,且AB为圆O的直径,M为线段PB的中点,N为线段BC的中点.求证:(1)平面MON∥平面PAC;(2)平面PBC⊥平面MON.[证明](1)因为M,O,N分别是PB,AB,BC的中点,所以MO∥PA,NO∥AC,又MO∩NO=O,PA∩AC=A,所以平面MON∥平面PAC.(2)因为PA⊥平面ABC,BC⊂平面ABC,所以PA⊥BC.由(1)知,MO∥PA,所以MO⊥BC.连结OC,则OC=OB,因为N为BC的中点,所以ON⊥BC.又MO∩ON=O,MO⊂平面MON,ON⊂平面MON,所以BC⊥平面MON.又BC⊂平面PBC,所以平面PBC⊥平面MON.[方法归纳]1.(2017·无锡期末)在四棱锥P-ABCD中,底面ABCD为矩形,AP⊥平面PCD,E,F分别为PC,AB的中点.求证:(1)平面PAD⊥平面ABCD;(2)EF∥平面PAD.证明:(1)因为AP⊥平面PCD,CD⊂平面PCD,所以AP⊥CD,因为四边形ABCD为矩形,所以AD⊥CD,又因为AP∩AD=A,AP⊂平面PAD,AD⊂平面PAD,所以CD⊥平面PAD,因为CD⊂平面ABCD,所以平面PAD⊥平面ABCD.(2)连结AC,BD交于点O,连结OE,OF,因为四边形ABCD为矩形,所以O点为AC的中点,因为E为PC的中点,所以OE∥PA,因为OE⊄平面PAD,PA⊂平面PAD,所以OE∥平面PAD,同理可得:OF∥平面PAD,又因为OE∩OF=O,所以平面OEF∥平面PAD,因为EF⊂平面OEF,所以EF∥平面PAD.2.(2016·江苏高考)如图,在直三棱柱ABC-A1B1C1中,D,E分别为AB,BC的中点,点F在侧棱B1B上,且B1D⊥A1F,A1C1⊥A1B1.求证:(1)直线DE∥平面A1C1F;(2)平面B1DE⊥平面A1C1F.证明:(1)在直三棱柱ABC-A1B1C1中,A1C1∥AC.在△ABC中,因为D,E分别为AB,BC的中点,所以DE∥AC,于是DE∥A1C1.又因为DE⊄平面A1C1F,A1C1⊂平面A1C1F,所以直线DE∥平面A1C1F.(2)在直三棱柱ABC-A1B1C1中,A1A⊥平面A1B1C1.因为A1C1⊂平面A1B1C1,所以A1A⊥A1C1.又因为A1C1⊥A1B1,A1A⊂平面ABB1A1,A1B1⊂平面ABB1A1,A1A∩A1B1=A1,所以A1C1⊥平面ABB1A1.因为B1D⊂平面ABB1A1,所以A1C1⊥B1D.又因为B1D⊥A1F,A1C1⊂平面A1C1F,A1F⊂平面A1C1F,A1C1∩A1F=A1,所以B1D ⊥平面A1C1F.因为直线B1D⊂平面B1DE,所以平面B1DE⊥平面A1C1F.[例3]圆O上,且AB∥EF,矩形ABCD所在的平面和圆O所在的平面互相垂直.(1)求证:平面AFC⊥平面CBF.(2)在线段CF上是否存在一点M,使得OM∥平面ADF?并说明理由.[解](1)证明:∵平面ABCD⊥平面ABEF,CB⊥AB,平面ABCD∩平面ABEF=AB,∴CB⊥平面ABEF.∵AF ⊂平面ABEF ,∴AF ⊥CB .又AB 为圆O 的直径,∴AF ⊥BF .又BF ∩CB =B ,∴AF ⊥平面CBF .∵AF ⊂平面AFC ,∴平面AFC ⊥平面CBF .(2)当M 为CF 的中点时,OM ∥平面ADF .证明如下:取CF 中点M ,设DF 的中点为N ,连结AN ,MN ,则MN 綊12CD ,又AO 綊12CD ,则MN 綊AO , ∴四边形MNAO 为平行四边形,∴OM ∥AN ,又AN ⊂平面DAF ,OM ⊄平面DAF ,∴OM ∥平面DAF .[方法归纳]与平行、垂直有关的存在性问题的解题步骤[变式训练]1.如图,四边形ABCD 是矩形,平面ABCD ⊥平面BCE ,BE ⊥EC .(1)求证:平面AEC ⊥平面ABE ;(2)点F 在BE 上,若DE ∥平面ACF ,求BF BE的值. 解:(1)证明:∵四边形ABCD 为矩形,∴AB ⊥BC ,∵平面ABCD ⊥平面BCE ,∴AB ⊥平面BCE ,∴CE ⊥AB .又∵CE ⊥BE ,AB ∩BE =B ,∴CE ⊥平面ABE ,又∵CE ⊂平面AEC ,∴平面AEC ⊥平面ABE .(2)连结BD 交AC 于点O ,连结OF .∵DE ∥平面ACF ,DE ⊂平面BDE ,平面ACF ∩平面BDE =OF .∴DE ∥OF ,又在矩形ABCD 中,O 为BD 中点,∴F 为BE 中点,即BF BE =12. 2.如图,在矩形ABCD 中,E ,F 分别为BC ,DA 的中点.将矩形ABCD 沿线段EF 折起,使得∠DFA =60°.设G 为AF 上的点.(1)试确定点G 的位置,使得CF ∥平面BDG ;(2)在(1)的条件下,证明:DG ⊥AE .解:(1)当点G 为AF 的中点时,CF ∥平面BDG .证明如下:因为E ,F 分别为BC ,DA 的中点,所以EF ∥AB ∥CD .连结AC 交BD 于点O ,连结OG ,则AO =CO .又G 为AF 的中点,所以CF ∥OG .因为CF ⊄平面BDG ,OG ⊂平面BDG .所以CF ∥平面BDG .(2)因为E ,F 分别为BC ,DA 的中点,所以EF ⊥FD ,EF ⊥FA .又FD ∩FA =F ,所以EF ⊥平面ADF ,因为DG ⊂平面ADF ,所以EF ⊥DG .因为FD =FA ,∠DFA =60°,所以△ADF 是等边三角形,DG ⊥AF ,又AF ∩EF =F ,所以DG ⊥平面ABEF .因为AE ⊂平面ABEF ,所以DG ⊥AE .[课时达标训练]1.如图,在三棱锥V -ABC 中,O ,M 分别为AB ,VA 的中点,平面VAB ⊥平面ABC ,△VAB 是边长为2的等边三角形,AC ⊥BC 且AC =BC .(1)求证:VB ∥平面MOC ;(2)求线段VC的长.解:(1)证明:因为点O,M分别为AB,VA的中点,所以MO∥VB.又MO⊂平面MOC,VB⊄平面MOC,所以VB∥平面MOC.(2)因为AC=BC,O为AB的中点,AC⊥BC,AB=2,所以OC⊥AB,且CO=1.连结VO,因为△VAB是边长为2的等边三角形,所以VO= 3.又平面VAB⊥平面ABC,OC⊥AB,平面VAB∩平面ABC=AB,OC⊂平面ABC,所以OC⊥平面VAB,所以OC⊥VO,所以VC=OC2+VO2=2.B1C1中,AC⊥BC,A1B2.(2017·南通二调)如图,在直三棱柱ABC-A与AB1交于点D,A1C与AC1交于点E.求证:(1)DE∥平面B1BCC1;(2)平面A1BC⊥平面A1ACC1.证明:(1)在直三棱柱ABC-A1B1C1中,四边形A1ACC1为平行四边形.又E为A1C与AC1的交点,所以E为A1C的中点.同理,D为A1B的中点,所以DE∥BC.又BC⊂平面B1BCC1,DE⊄平面B1BCC1,所以DE∥平面B1BCC1.(2)在直三棱柱ABC-A1B1C1中,AA1⊥平面ABC,又BC⊂平面ABC,所以AA1⊥BC.又AC⊥BC,AC∩AA1=A,AC⊂平面A1ACC1,AA1⊂平面A1ACC1,所以BC⊥平面A1ACC1.因为BC⊂平面A1BC,所以平面A1BC⊥平面A1ACC1.3.(2017·南京三模)如图,在三棱锥A-BCD中,E,F分别为棱BC,CD上的点,且BD∥平面AEF.(1)求证:EF∥平面ABD;(2)若BD⊥CD,AE⊥平面BCD,求证:平面AEF⊥平面ACD.证明:(1)因为BD∥平面AEF,BD⊂平面BCD,平面AEF∩平面BCD=EF,所以BD∥EF.因为BD⊂平面ABD,EF⊄平面ABD,所以EF∥平面ABD.(2)因为AE⊥平面BCD,CD⊂平面BCD,所以AE⊥CD.因为BD⊥CD,BD∥EF,所以CD⊥EF,又AE∩EF=E,AE⊂平面AEF,EF⊂平面AEF,所以CD⊥平面AEF.又CD⊂平面ACD,所以平面AEF⊥平面ACD.4.在四棱锥P-ABCD中,PA⊥底面ABCD,AB∥CD,AB⊥BC,AB=BC=1,DC=2,点E在PB上.(1)求证:平面AEC⊥平面PAD;(2)当PD∥平面AEC时,求PE∶EB的值.解:(1)证明:在平面ABCD中,过A作AF⊥DC于F,则CF=DF=AF=1,∴∠DAC=∠DAF+∠FAC=45°+45°=90°,即AC⊥DA.又PA⊥平面ABCD,AC⊂平面ABCD,∴AC⊥PA.∵PA⊂平面PAD,AD⊂平面PAD,且PA∩AD=A,∴AC⊥平面PAD.又AC⊂平面AEC,∴平面AEC⊥平面PAD.(2)连结BD交AC于O,连结EO.∵PD∥平面AEC,PD⊂平面PBD,平面PBD∩平面AEC=EO,∴PD∥EO,则PE∶EB=DO∶OB.又△DOC∽△BOA,∴DO∶OB=DC∶AB=2∶1,∴PE∶EB的值为2.5.(2017·扬州考前调研)如图,在四棱锥P-ABCD中,底面ABCD为梯形,CD∥AB,AB=2CD,AC交BD于O,锐角△PAD所在平面⊥底面ABCD,PA⊥BD,点Q在侧棱PC上,且PQ=2QC.求证:(1)PA∥平面QBD;(2)BD⊥AD.证明:(1)连结OQ,因为AB∥CD,AB=2CD,所以AO =2OC ,又PQ =2QC ,所以PA ∥OQ ,因为OQ ⊂平面QBD ,PA ⊄平面QBD ,所以PA ∥平面QBD .(2)在平面PAD 内过P 作PH ⊥AD 于H ,因为侧面PAD ⊥底面ABCD ,平面PAD ∩平面ABCD =AD ,PH ⊂平面PAD , 所以PH ⊥平面ABCD ,又BD ⊂平面ABCD ,所以PH ⊥BD .又PA ⊥BD ,且PA ∩PH =P ,PA ⊂平面PAD ,PH ⊂平面PAD ,所以BD ⊥平面PAD ,又AD ⊂平面PAD ,所以BD ⊥AD .6.如图,在多面体ABCDFE 中,四边形ABCD 是矩形,四边形ABEF为等腰梯形,且AB ∥EF ,AF =2,EF =2AB =42,平面ABCD ⊥平面ABEF .(1)求证:BE ⊥DF ;(2)若P 为BD 的中点,试问:在线段AE 上是否存在点Q ,使得PQ ∥平面BCE ?若存在,找出点Q 的位置;若不存在,请说明理由.解:(1)证明:如图,取EF 的中点G ,连结AG ,因为EF =2AB ,所以AB =EG ,又AB ∥EG ,所以四边形ABEG 为平行四边形,所以AG ∥BE ,且AG =BE =AF =2.在△AGF 中,GF =12EF =22,AG =AF =2, 所以AG 2+AF 2=GF 2,所以AG ⊥AF .因为四边形ABCD 为矩形,所以AD ⊥AB ,又平面ABCD ⊥平面ABEF ,且平面ABCD ∩平面ABEF =AB ,AD ⊂平面ABCD , 所以AD ⊥平面ABEF ,又AG ⊂平面ABEF ,所以AD ⊥AG .因为AD ∩AF =A ,所以AG ⊥平面ADF .因为AG ∥BE ,所以BE ⊥平面ADF .因为DF ⊂平面ADF ,所以BE ⊥DF .(2)存在点Q ,且点Q 为AE 的中点,使得PQ ∥平面BCE .证明如下:连结AC ,因为四边形ABCD 为矩形,所以P 为AC 的中点.在△ACE中,因为点P,Q分别为AC,AE的中点,所以PQ∥CE.又PQ⊄平面BCE,CE⊂平面BCE,所以PQ∥平面BCE.。
几何中的立体图形基本概念

几何中的立体图形基本概念一、立体图形的定义与分类1.定义:立体图形是三维空间中的图形,具有长度、宽度和高度。
a)立体几何图形的分类:锥体、柱体、球体、平面立体图形等。
b)根据表面特征分类:直纹立体图形、曲面立体图形等。
二、常见立体图形的基本性质与特征a)定义:底面为平面,顶点在底面上的图形。
i)圆锥:底面为圆,侧面为曲面。
ii)棱锥:底面为多边形,侧面为三角形。
iii)所有锥体的侧面积相等。
iv)锥体的体积与底面半径和高度有关。
b)定义:底面为平行四边形的立体图形。
c)分类:棱柱、圆柱等。
i)柱体的底面积相等。
ii)柱体的体积与底面积和高度有关。
d)定义:所有点与中心点距离相等的立体图形。
πR³。
i)球体的表面积和体积公式为:S=4πR²,V=43ii)球体的直径等于两倍的半径。
4.平面立体图形:a)定义:由平面图形旋转而成的立体图形。
b)分类:圆柱、圆锥、棱柱等。
c)性质:平面立体图形的表面积和体积与平面图形的性质有关。
三、立体图形的计算方法a)圆锥体积公式:V=1πR²h。
3b)棱锥体积公式:V=13Bh ,其中B 为底面积。
c)棱柱体积公式:V=Bh ,其中B 为底面积。
d)圆柱体积公式:V=πR²h 。
e)体积公式:V=43πR³。
f) 表面积公式:S=4πR²。
四、立体图形的实际应用a)应用:漏斗、沙堆等。
b)应用:柱子、烟囱等。
c)应用:球体、地球等。
4. 平面立体图形:a) 应用:各种容器、家具等。
通过以上知识点的学习,学生可以对几何中的立体图形有更深入的了解,并能够运用所学知识解决实际问题。
习题及方法:1.习题:计算一个底面半径为3cm ,高为4cm 的圆锥体的体积。
答案:V=13πR²h=13π×3²×4=12πcm³解题思路:根据圆锥体的体积公式V=13πR²h ,将给定的数值代入公式计算。
立体图形的基本知识与计算方法

立体图形的基本知识与计算方法一、立体图形的概念与分类1.立体图形的定义:立体图形是具有三维空间的图形,它包括长度、宽度和高度三个维度。
2.立体图形的分类:a)几何体:根据面的形状和结构,几何体可以分为以下几种类型:•单体几何体:如球体、立方体、圆柱体、圆锥体等;•复合几何体:如长方体、棱柱、棱锥等;•旋转体:如圆环、圆台等。
b)非几何体:如圆柱面、圆锥面、球面等。
二、立体图形的计算方法1.体积的计算:a)单体几何体的体积计算公式:•球体:V = (4/3)πr³;•立方体:V = a³;•圆柱体:V = πr²h;•圆锥体:V = (1/3)πr²h。
b)复合几何体的体积计算公式:•长方体:V = lwh;•棱柱:V = Bh;•棱锥:V = (1/3)Bh。
c)旋转体的体积计算公式:•圆柱面:V = πR²h;•圆锥面:V = (1/3)πR²h;•球面:V = (4/3)πR³。
2.表面积的计算:a)单体几何体的表面积计算公式:•球体:S = 4πr²;•立方体:S = 6a²;•圆柱体:S = 2πrh + 2πr²;•圆锥体:S = πrl + πr²。
b)复合几何体的表面积计算公式:•长方体:S = 2(lw + lh + wh);•棱柱:S = 2(B + Ph);•棱锥:S = 2(B + P)。
c)旋转体的表面积计算公式:•圆柱面:S = 2πRh + 2πR²;•圆锥面:S = πrl + πR²;•球面:S = 4πR²。
三、立体图形的性质与特点1.立方体:立方体有六个面,均为正方形,对角线相等,体积和表面积的计算公式如上所述。
2.球体:球体是一种对称的立体图形,体积和表面积的计算公式如上所述。
3.圆柱体:圆柱体由两个平行的圆形底面和一个侧面组成,体积和表面积的计算公式如上所述。
三维立体图及答案
请您欣赏:三维立体图及答案,让您一次看个够三维立体图,是人们最喜欢看的一种图。
看似杂乱无章,其实里面有一种奇妙的立体世界。
三维立体图,只要您两眼平视它后再交叉看,就会发现一些东西,那是什么东西呢?样式您可能意想不到!这幅是老虎,那幅又是“口袋”2字,甚至有中国地图。
三维立体图你看看这个杂乱的世界,便会发现一些规律。
像画,这可不简单。
这是在一个空间里画的。
就像一个房子,三面有墙,一面没有,你看的那一面就是没有墙的那一面,里面就是藏的东西。
观看三维立体图至少有四种技巧可以推荐:1、(特别推荐)第一种方法是:双眼与三维立体图距离20厘米,伸出食指,竖在眼睛前方3厘米处,双眼先看食指,缓缓地再透过食指看三维立体图上的“献血光荣”,注意眼珠转动要慢要小,可以说是微调,当1个“献血光荣”变成2个“献血光荣”时,三维效果就可以显现出来。
图中中下方显示的立体图为:一只奔跑的梅花鹿2、第二种方法是要让你的眼睛休息三分种,在三维立体画上方中间位置用视线确定两个点,然后用稍微模糊的视线越过三维立体画眺望远方;这时就会看到从两个点各自分离出另外两个点,成为四个点,这时候图象就会模糊起来,不要急,调整你的视线,试图将里面的两个点合成一个点,当四个点变成三个点时,你就会看到立体图象了。
但要注意,图画上下两边一定要与双眼平行,斜着不会看出来的。
3、第三种方法是先看着屏幕上反射的自己的映象,然后缓缓地将视觉注意力转向图片,但注意眼珠不要转动,不要盯着图片中的细节看,而是模糊地看着图片的全貌型……4、第四种方法是先将你的脸贴近屏幕并且眼光好像穿过屏幕,然后缓缓地拉开距离,不要使眼睛在图片上聚焦,但又要保持你的视线,边拉开边放松视觉,直到三维效果显现出来。
好了,以下是“爱心献血屋”网站站长“无偿献血者”林瑞班创作的一些三维立体图,“无偿献血者”创作三维立体图,不仅仅是为了好玩,更为重要的是想通过三维立体图这种许多人爱看的图来宣传无偿献血,这些图片首次发表在“爱心献血屋”网站上,请您多多指教!!口袋中国地图生肖虎生肖牛生肖兔生肖马生肖猴360接待标志图2009OK凹凸八卦图齿轮多层方圆多个圆飞机光芒四射过马路,手拉手花吉几个正方形口随意性菱形六角星人三个叠加菱形射箭时钟四圆相连太阳与人兔子小心跌倒标志图星形许多整齐的凹洞一对情侣一个标志祝福送给您足球鲜花送给无偿献血者:此图可以看出多种立体效果。
cad三维画图练习题及答案
cad三维画图练习题及答案通过以下练习可对cad 三维制图有所理解加强,望大家共同进步,不会画的可在我空间留言,共同探讨!23451.利用extrude和subtract命令机器人底座立体图的绘制2.用CAD对如图所表达的立体进行三维造型。
通过本题,演示用CAD进行三维造型的主要步骤。
做图步骤:在XOY平面内画出底板外形。
沿路径拉伸φ6的圆成圆柱体。
3.脚手架步骤当前线框密度: ISOLINES=10Cylinder,co,box,三维视图调到主视),mirror3d,输入rmat命令,打开材质窗口,选择一张木材的贴图,附材质给对象,输入render命令,渲染对象4绘制烟灰缸本例绘制了一个烟灰缸,如图所示,主要使用了“圆”、“圆柱体”、“拉伸”、“差集”、“球体”、“阵列”等命令。
要点提示首先将视区设置为4个视口,运用“圆柱体”、“圆”、“拉伸”命令绘制烟灰缸的基本体,再运用“球体”、“阵列”、“差集”命令创建实体-烟灰缸,最后运用“渲染”、“材质”命令渲染烟灰缸。
绘制烟灰缸的基本体1、单击菜单栏中的“视图”\“视口”\“四个视口”命令,将视区设置为4个视口。
单击左上角视图,将该视图激活,执行“视图”\“三维视图”\“主视”命令,将其设置为主视图。
利用同样的方法,将右上角视图设置为左视图;将左下角视图设置为俯视图;将右下角视图设置为西南等轴测视图。
2、激活俯视图,在俯视图中绘制一个圆柱体作为烟灰缸的基本体。
命令栏中输入“isolines”命令命令: isolines输入 ISOLINES 的新值 :0单击“实体”工具栏中的“圆柱体”图标,绘制底面的半径为70 ,高度为40的圆柱体。
3、单击“绘图”工具栏中的“圆”图标,绘制半径为60的圆。
激活左视图,框选圆柱体底部的圆,单击“修改”工具栏中的“移动”图标,将半径为60的圆向上移动到顶面。
4、单击“实体”工具栏中的“拉伸”图标,将半径为60的圆沿30度倾斜角度拉伸 -30。
练习07三维立体问题--2021年高考物理一轮复习习题课(选修3-1)
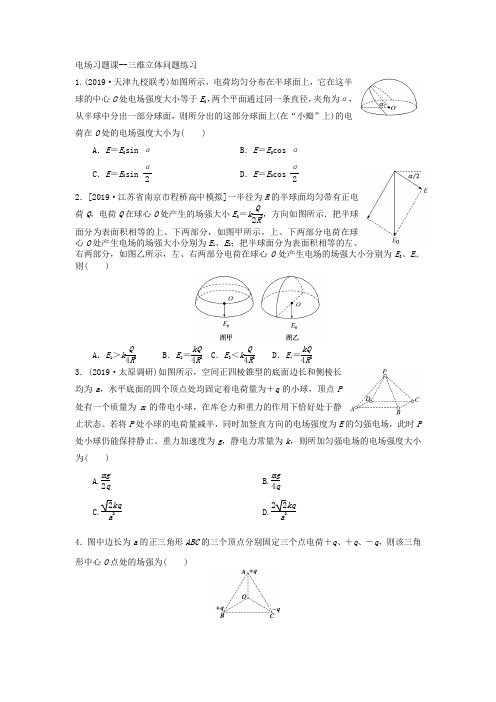
电场习题课--三维立体问题练习1.(2019·天津九校联考)如图所示,电荷均匀分布在半球面上,它在这半球的中心O 处电场强度大小等于E 0,两个平面通过同一条直径,夹角为α,从半球中分出一部分球面,则所分出的这部分球面上(在“小瓣”上)的电荷在O 处的电场强度大小为( )A .E =E 0sin αB .E =E 0cos αC .E =E 0sin α2D .E =E 0cos α2 2.[2019·江苏省南京市程桥高中模拟]一半径为R 的半球面均匀带有正电荷Q ,电荷Q 在球心O 处产生的场强大小E 0=k Q2R2,方向如图所示.把半球面分为表面积相等的上、下两部分,如图甲所示,上、下两部分电荷在球心O 处产生电场的场强大小分别为E 1、E 2;把半球面分为表面积相等的左、右两部分,如图乙所示,左、右两部分电荷在球心O 处产生电场的场强大小分别为E 3、E 4.则( ) A .E 1>k Q 4R 2 B .E 2=kQ 4R 2 C .E 3<k Q 4R 2 D .E 4=kQ 4R2 3.(2019·太原调研)如图所示,空间正四棱锥型的底面边长和侧棱长均为a ,水平底面的四个顶点处均固定着电荷量为+q 的小球,顶点P处有一个质量为m 的带电小球,在库仑力和重力的作用下恰好处于静止状态。
若将P 处小球的电荷量减半,同时加竖直方向的电场强度为E 的匀强电场,此时P 处小球仍能保持静止。
重力加速度为g ,静电力常量为k ,则所加匀强电场的电场强度大小为( )A.mg 2qB.mg 4qC.2kq a 2D.22kq a 24.图中边长为a 的正三角形ABC 的三个顶点分别固定三个点电荷+q 、+q 、-q ,则该三角形中心O 点处的场强为( )A.6kq a 2,方向由C 指向OB.6kq a2,方向由O 指向C C.3kq a 2,方向由C 指向O D.3kq a2,方向由O 指向C5.(多选)如图,在水平面上A 、B 、C 三点固定着三个电荷量为3Q 的正点电荷,将另一质量为m 的带正电的小球(可视为点电荷)放置在O 点,OABC 恰构成一棱长为L 的正四面体,已知静电力常量为k ,重力加速度为g .为使小球能静止在O 点,则关于小球所受电场力的合力方向和所带的电荷量,下列说法中正确的是( )A .所受电场力的合力方向竖直向上B .所受电场力的合力方向竖直向下C .电荷量为6mgL 29kQD .电荷量为6mgL 218kQ6.如图所示,a 、b 、c 、d 为正四面体的四个顶点,O 点为d 点在底面上的投影,在a 、b 两点分别放置等量的负点电荷,则( ) A .c 点电势大于d 点电势B .c 、d 两点的电场强度相同C .从O 点沿Od 移动负电荷,负电荷的电势能不断增大D .从c 点沿cd 移动正电荷,正电荷受到的电场力先做正功,后做负功7.(多选)一空间存在匀强电场,场中A 、B 、C 、D 四个点恰构成正四面体,如图所示。
中职数学立体几何
机械设计中的立体几何
零件建模
机械设计师使用立体几何知识构建零件的三维模 型。
运动分析
通过立体几何对机械部件的运动轨迹、速度、加 速度等进行精确分析。
有限元分析
在机械设计中,有限元分析是一种常用的方法, 立体几何是实现这一方法的关键。
计算机图形学中的立体几何
3D建模
在计算机图形学中,3D建模是基础,立体几何提供了构建三维物 体的理论和技术。
在计算机图形学中,图形 变换是实现三维图形渲染 和动画的关键技术之一。
04
立体几何的实际应用
建筑中的立体几何
建筑设计
建筑师利用立体几何知识进行建 筑设计,如空间布局、角度计算、
透视效果等。
结构分析
建筑结构工程师使用立体几何来 分析建筑结构的稳定性、承重能
力等。
施工测量
在建筑施工过程中,需要进行精 确的测量和定位,立体几何提供
特点
立体几何具有抽象性和直观性,它通 过逻辑推理和证明来研究空间图形的 性质,同时借助图形和模型来直观地 理解空间关系。
立体几何的重要性
实际应用
数学学科基础
立体几何在建筑、工程、机械等领域 有着广泛的应用,如建筑设计、施工 图纸绘制、机械零件的制造等。
立体几何是数学学科中的基础课程之 一,对于后续学习其他数学课程,如 解析几何、微积分等具有重要意义。
中职数学立体几何
目录
• 立体几何概述 • 立体几何基础知识 • 立体几何的图形变换 • 立体几何的实际应用 • 立体几何的解题技巧 • 立体几何的练习题与答案
01
立体几何概述
定义与特点
定义
立体几何是研究三维空间中图形和几 何对象的一门学科。它主要探讨空间 中点、线、面、体之间的关系,以及 它们的性质、形状和度量。
工程制图习题集_非机械类专业适用(刘苏,段丽玮,贾皓丽编)PPT模板

05
Part One
第五章
组合体
第五章 组合体
0 1
画组合体三视 图
0 4
组合体读图初 步训练
0 2
※画组合体三 视图综合练习
0 5
组合体读图
0 3
组合体正等测 图
0 6
※组合体读图 综合练习
06
Part One
第六章
工程图样表达
第一章
三维建模基础
第一章 基础
特征建模 组合体建模
三维建模
02
Part One
第二章
绘图练习
第二章 绘图练 习
03
Part One
第三章
投影与三视图
第三章 投影与三 视图
立体与三视图 三视图补漏线 ※画三视图综合练习
04
Part One
第四章 平面与立体、立体与立体的表面交线
第四章 平面与立体、 立体与立体的表面交线
工程制图习题集:非机械类专业 适用(刘苏,段丽玮,贾皓丽编)
演讲人
202X-11-11
目录
contents
第一章 三维建模 基础
第二章 绘图练习
第三章 投影与三 视图
第四章 平面与立 体、立体与立体的
表面交线
第五章 组合体
第六章 工程图样 表达
第七章 零件图与 装配图
第八章 综合练习 答案
01
Part One
第六章 工程图样表达
A
视图 表达
D
※图样表 达综合练
习
B
剖视 表达
E
螺纹及螺 纹连接
C
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
请您欣赏:三维立体图及答案,让您一
次看个够
三维立体图,是人们最喜欢看的一种图。
看似杂乱无章,其实里面有一种奇妙的立体世界。
三维立体图,只要您两眼平视它后再交叉看,就会发现一些东西,那是什么东西呢?样式您可能意想不到!这幅是老虎,那幅又是“口袋”2字,
甚至有中国地图。
三维立体图你看看这个杂乱的世界,便会发现一些规律。
像画,这可不简单。
这是在一个空间里画的。
就像一个房子,三面有墙,一面没有,你看
的那一面就是没有墙的那一面,里面就是藏的东西。
观看三维立体图至少有四种技巧可以推荐:
1、(特别推荐)第一种方法是:双眼与三维立体图距离20厘米,伸出食指,竖在眼睛前方3厘米处,双眼先看食指,缓缓地再透过食指看三维立体图上的“献血光荣”,注意眼珠转动要慢要小,可以说是微调,当1个“献血光荣”变成2个“献血光荣”时,三维效果就可以显现出来。
图中中下方显示的立体图为:一只奔跑的梅花鹿
2、第二种方法是要让你的眼睛休息三分种,在三维立体画上方中间位置用视线确定两个点,然后用稍微模糊的视线越过三维立体画眺望远方;这时就会看到从两个点各自分离出另外两个点,成为四个点,这时候图象就会模糊起来,不要急,调整你的视线,试图将里面的两个点合成一个点,当四个点变成三个点时,你就会看到立体图象了。
但要注意,图画上下两边一定要与双眼平行,斜着不会看出来的。
3、第三种方法是先看着屏幕上反射的自己的映象,然后缓缓地将视觉注意力转向图片,但注意眼珠不要转动,不要盯着图片中的细节看,而是模
糊地看着图片的全貌型……
4、第四种方法是先将你的脸贴近屏幕并且眼光好像穿过屏幕,然后缓缓地拉开距离,不要使眼睛在图片上聚焦,但又要保持你的视线,边拉开边
放松视觉,直到三维效果显现出来。
好了,以下是“爱心献血屋”网站站长“无偿献血者”林瑞班创作的一些三维立体图,“无偿献血者”创作三维立体图,不仅仅是为了好玩,更为重要的是想通过三维立体图这种许多人爱看的图来宣传无偿献血,这些图片首次发表在“爱心献血屋”网站上,请您多多指教!!
口袋
中国地图
生肖虎
生肖牛
生肖兔
生肖马
生肖猴
360
接待标志图
2009
OK
凹凸
八卦图
齿轮
多层方圆
多个圆
飞机
光芒四射
过马路,手拉手
花
吉
几个正方形
口
随意性
菱形
六角星
人
三个叠加菱形
射箭
时钟
四圆相连
太阳与人
兔子
小心跌倒标志图
星形
许多整齐的凹洞
一对情侣
一个标志
祝福送给您
足球
鲜花送给无偿献血者:此图可以看出多种立体效果。