智能控制结课考核试题
智能控制结课考核试题
要求:1月14日上午以班为单位交到13教214,必须手写不得打印。
1.设有下列语句,请用相应的谓词公式把它们表示出来:
(1)有的人喜欢梅花,有的人喜欢菊花,有的人既喜欢梅花又喜欢菊花。
(2)他每天下午都去玩足球
(3)邯郸市的夏天既干燥又炎热。
(4)所有人都有饭吃。
(5)喜欢玩篮球的人必喜欢玩排球
(6)要想出国留学,必须通过外语考试。
2.把下列语句表示成语义网络描述:
(1)All man are mortal 。
(2)Every cloud has a silver lining 。
(3)All branch anagers of DEC participate in a profit-sharing plan.
(4)孙老师从2月至7月给计算机应用专业讲《网络技术》课程。
(5)雪地上留下一串串脚印,有的大,有的小,有的深,有的浅。
(6)请把下列命题用一个语义网络表示出来:
a.猪和羊都是动物
b.猪和羊都是偶蹄动物和哺乳动物;
c.野猪是猪,但生长在森林中;
d.山羊是羊,且头上长着角;
e.绵羊是一种羊,它能生产羊毛。
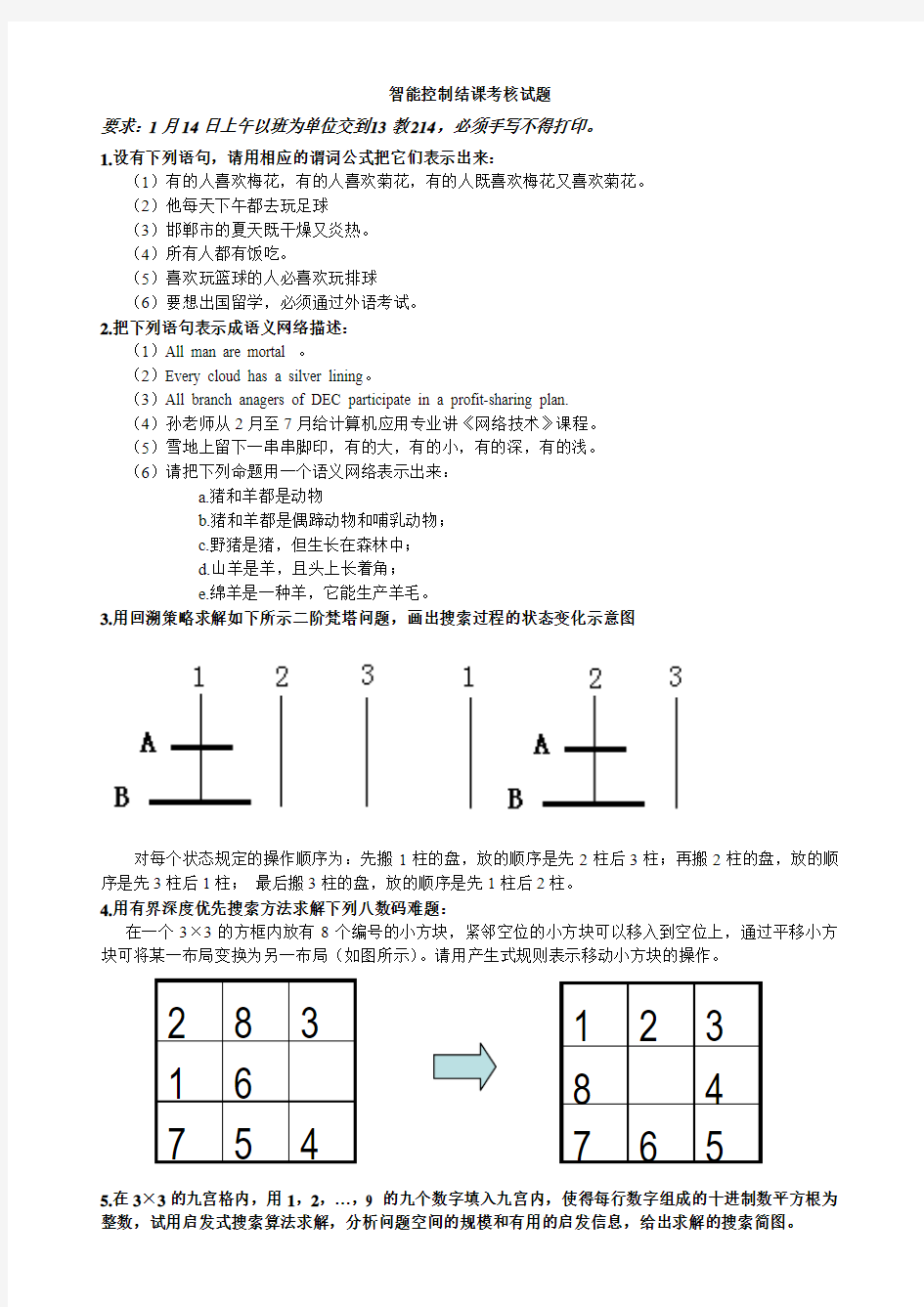
3.用回溯策略求解如下所示二阶梵塔问题,画出搜索过程的状态变化示意图
对每个状态规定的操作顺序为:先搬1柱的盘,放的顺序是先2柱后3柱;再搬2柱的盘,放的顺序是先3柱后1柱; 最后搬3柱的盘,放的顺序是先1柱后2柱。
4.用有界深度优先搜索方法求解下列八数码难题:
在一个3×3的方框内放有8个编号的小方块,紧邻空位的小方块可以移入到空位上,通过平移小方块可将某一布局变换为另一布局(如图所示)。请用产生式规则表示移动小方块的操作。
5.在3×3的九宫格内,用1,2,…,9 的九个数字填入九宫内,使得每行数字组成的十进制数平方根为整数,试用启发式搜索算法求解,分析问题空间的规模和有用的启发信息,给出求解的搜索简图。
4 5 7 6 1 3 8 2 5 6
7 4 8 3 2 1
2019级智能控制技术专业人才培养方案
(3+2)智能控制技术专业人才培养方案 一、专业名称及代码 专业名称:智能控制技术 专业代码:560304 二、招生对象、学制及学历 本专业招收普通初中毕业生,全日制五年,其中中职3年、高职2年。 三、人才培养目标与规格 1.人才培养目标 本专业主要针对锦州地区对智能控制技术技能型人才的需要,面向新型工业化的机电制造、新能源、电力和新型建材等行业,从事智能化电气元件的设计、制造、调试、维护和管理的高级技术应用性专门人才。能完成智能化设备及其生产线的安装调试、运行和维护;智能电气元件的自动化设计与改造、故障诊断、管理与售后;智能配电柜的设计制造等典型工作任务,具有较强的实践动手能力、拥护党的基本路线,德、智、体、美全面发展的高级技术应用型人才。 三、培养规格及课程体系: 能力、素质结构如下表:
六、专业核心课程简介
七、实践教学安排表 八、专业教学计划 1.教学执行计划
填写说明:打*号课时由讲座、班会、讨论、竞赛等形式完成, 2、教学环节综合分析 (1) 理论教学与实践教学比例分析 学时与学分分析 (2) 九、教学实施保障 1.师资队伍配备 (1)“双师型”专业教学团队 智能控制专业教学团队由专、兼职教师组成,本专业的专职专业教师为28人,兼职教师16其中,专业带头人1人,专业骨干教师4人;具有高级以上职称12人、具有中级职称10人;双师型教师24人;均为大学本科以上学历。教师队伍的职称、学历、专业能力满足教学要求。 (2)专业带头人 专业带头人具有本科学历,副高职称,具有双师能力;有较高的专业建设水平和企业实践能力;掌握国内外职业教育与专业发展动态,能够在专业规划、专业建设、科研与教研、教学改革和青年教师培养等方面发挥引领作用。 (3)专业骨干教师 专业骨干教师应具有本科以上学历,讲师以上职称,具有中高级职业资格证书,具有双师能力;独立承担一门以上工学结合专业主干课程,能够独立完成课程开发和教学改革项目,在专业建设中发挥骨干作用。 (4)企业兼职教师 兼职教师为锦州地区机电类相关企业和学校的能工巧匠,具有从事5年以上机电专业的
2011-12学年第1学期_ 智能控制试题B
(勤奋、求是、创新、奉献) 2011~2012学年第2学期考试试卷B 学院班级姓名__________ 学号___________ 《智能控制系统》课程试卷 (本卷考试时间90 分钟) 一. 1.写出4种专家系统的知识表示方法。 逻辑表示法、产生式表示法、框架表示法、语义网络表示法 2.递阶智能系统的智能程度分布一般要遵循什么原则。 随着智能程度的提高,精度下降 3.写出宽度优先搜索和深度优先搜索的根本区别? 深度优先与宽度优先算法最根本的不同在于:扩展的后继节点放在OPEN表的前端。 4.何谓多层前向神经网络? 具有分层的结构,通常包括输入层、隐层(也称中间层)和输出层。每一层的神经元只接受上一层神经元的输入,并且该层神经元的输出送给下一层的各个神经元。 5.写出3种模糊输出向量的解模糊方法 重心法、最大隶属度法、取中位数判决法
6. 写出基本遗传算法的3个基本操作 选择、交叉、变异 二、简答题(共24分,每题6分) 1、下式是永真蕴含式吗?如是请证明之。 ┐Q ∧ (P →Q)? ┐P 证明:(1)┐Q ∧ (P →Q)为T 推出┐P 为T ┐Q ∧ (P →Q)为T 推出┐Q 且(P →Q)为T →Q 为F 且(P →Q)为T 分情况讨论p F-----------------p T ---???为显然不成立 为成立 (2)┐P 为F 推出┐Q ∧ (P →Q)为F →P 为T 推出┐Q ∧ (P →Q)为F 分情况讨论Q F-----------------Q T -------???为成立 为成立 (3)真值表法 2、简述隶属度函数建立的一般准则? 表示隶属度函数的模糊集合必须是凸模糊集合 变量所取隶属度函数通常是对称和平衡的 隶属度函数要符合人们的语义顺序,避免不恰当的重叠
智能控制技术试卷
一、选择题 1、蔡自兴教授提出智能控制系统的四元结构,认为智能控制是人工智能、控制理论、系统理论和运筹学四种学科的交叉。 2、专家是指在某一专业领域内其专业知识与解决问题的能力达到很高水平的学者。 3、专家系统中的知识按其在问题求解中的作用可分为三个层次,即数据级、知识库级和控制级。 4、不确定性知识的表示有三种:概率、确定性因子和模糊集合。 5、Hebb学习规则是一种无教师的学习方法,它只根据神经元连接间的激活水平改变权值,因此这种方法又称为相关学习和并联学习。 6、交叉运算是两个相互配对的染色体按某种方式相互交换其部分基因,从而形成两个新的个体。 二、判断题 1、IEEE控制系统协会把智能控制归纳为:智能控制系统必须具有模拟人类学习和自适应的能力。( T ) 2、不精确推理得出的结论可能是不确定的,但会有一个确定性因子,当确定性因子超过某个域值时,结论便不成立。( F ) 3、一般的专家系统由知识库、推理机、解释机制和知识获取系统等组成。( T ) 4、人机接口是专家系统与领域专家、知识工程师、一般用户间进行交互的界面,由一组程序及相应的硬件组成,用于完成知识获取工作。( F ) 5、Hopfield神经网络是反馈神经网络中最简单且应用广泛的模型,它具有联想记忆的功能。( F ) 6、知识是将有关的信息进一步关联在一起,形成了更高层次含义的一种信息结构,信息与关联是构成知识的两个基本要素。( T ) 7、建造知识库涉及知识库建造的两项主要技术是知识获取和知识存放。( F ) 8、模糊控制系统往往把被控量的偏差(一维)、偏差变化(二维)以及偏差的变化率(三维)作为模糊控制器的输入。( T ) 9、RBF网络的学习过程与BP网络的学习过程是类似的,两者的主要区别在于使用了相同的激励函数。( F ) 10、应用遗传算法求解问题时,在编码方案、适应度函数及遗传算子确定后,算法将利用进化过程中获得的信息自信组织搜索。( T ) 三、简答题 1.分别说明专家系统与专家控制系统? 答:专家系统就是利用存储在计算机内的某一特定领域内人类专家的知识,来解决过去需要人类专家才能解决的现实问题的计算机系统。专家控制是将人工智能领域的专家系统理论和技术与控制理论方法和技术相结合,仿效专家智能,实现对较为复杂问题的控制。基于专家控制原理所设计的系统称为专家控制系统。 2.人工神经网络中两种典型的结构模型是什么?它们进行学习时具有哪些特点? 答:两种典型的结构模型是前馈神经网络和反馈神经网络。前馈神经网络有感知器和BP网络等;主要采用 学习规则,这是有教师学习方法。反馈神经网络有Hopfield神经网络、Boltzmann机网络等;主要采用Hebb学习规则,概率式学习算法。
智能控制课程论文
一、引言 (3) 二、轧机液压AGC数学模型 (3) 三、基于BP神经网络的轧机AGC过程控制 (5) (一)人工神经网络基本思想及其发展 (6) (二)人工神经网络的工作原理 (7) (三)人工神经网络的主要功能特点 (8) 四、神经网络辨识 (9) (一)扩展BP神经算法 (9) (二)基于时间序列的动态模型辨识 (11) 五、辨识结果 (12) (一)轧制力辨识 (12) (二)液压AGC参数辨识 (13) 六、结果检验 (14) (一)模型检验 (14) (二)辨识结果对比 (14) 七、结论 (15) 八、参考文献: (15)
先进过程控制技术在轧机液压领域的应用 摘要:轧机液压AGC控制过程的力控精度直接影响带钢的组织性能和力学性能,是保证板带质量和板形良好的关键因素。所以对轧机液压AGC的力控制,成为热轧生产中的重要环节,对其过程进行分析和研究具有深远的现实意义。本文以国内某热轧厂轧机液压AGC控制为背景,对如何提高轧机液压AGC控制的力控精度从控制方法上入手进行了较深入系统的研究。在分析液压AGC的组成元件及其动态特性的基础上, 利用神经网络具有逼近任何非线性函数且具有自学习和自适应的能力, 建立基于时间序列的前馈动态模型辨识结构, 应用扩展BP算法对轧机液压AGC力控制系统进行非线性预测, 将预测结果应用最小二乘辨识方法进行线性系统的特征参数辨识, 仿真及实测结果表明此方法行之有效, 为轧机液压AGC的控制提供了新途径。 关键词:自适应辨识;板带轧机;液压AGC;神经网络
Advanced process control technology in the field of rolling mill hydraulic applications Abstr act: In the process of rolling mill hydraulic AGC control force control precision directly affects the organization performance and mechanics performance of the steel strip, is guarantee the quality of strip and plate shape of the key factors. So the force control of rolling mill hydraulic AGC, become the important link between the hot rolling production, analyzes its process and research has far-reaching practical significance. This paper, taking a warmwalzwerk domestic mill hydraulic AGC control as the background, on how to improve the force control precision of the rolling mill hydraulic AGC control from the control methods of conducted in-depth study of the system. Based on the analysis of dynamic characteristics of hydraulic AGC components and, on the basis of using the neural network has any nonlinear function approximation, and has the ability of self learning and adaptive feedforward dynamic model identification based on time series structure, extend the BP algorithm was applied to rolling mill hydraulic AGC force control system for nonlinear prediction, and the predicted results using least squares identification method for characteristic parameters of a linear system identification, simulation and experimental results show that this method is effective, for rolling mill hydraulic AGC control provides a new way. Key wor ds: adaptive identification; stripe mill; hydraulic AGC; neural network
最新智能控制基础期末考试题答案
2010级智能控制基础期末 复习思考题 一重要概念解释 1 智能控制 所谓的智能控制,即设计一个控制器(或系统),使之具有学习、抽象、推理、决策等功能,并能根据环境信息的变化做出适应性反应,从而实现由人来完成的任务。 2 专家系统与专家控制 专家系统是一类包含知识和推理的智能计算机程序,其内部包含某领域专家水平的知识和经验,具有解决专门问题的能力。 专家控制是智能控制的一个重要分支。所谓专家控制,是将专家系统的理论和技术同控制理论、方法与技术相结合,在未知环境下,仿效专家的经验,实现对系统的控制。它由知识库和推理机构构成主体框架,通过对控制领域知识的获取与组织,按某种策略及时的选用恰当的规则进行推理输出,实现对实际对象的控制 3 模糊集合与模糊关系,模糊推理模糊控制 ● 1)模糊集合:给定论域U 上的一个模糊集A %是指:对任何元素u U ∈ 都存在一个数()[] 0,1A u μ∈与之对应,表示元素u 属于集合A % 的程度,这个数称为元素u 对集合A %的隶属度,这个集合称为模糊集合。 ● 模糊关系:二元模糊关系:设A 、B 是两个非空集合,则直积(){},|,A B a b a A b B ?=∈∈中的一个 模糊集合 称为从A 到B 的一个模糊关系。模糊关系R %可由其隶属度(),R a b μ完全描述,隶属度 (),R a b μ 表明了元素a 与元素b 具有关系R %的程度。 ● 模糊推理:知道了语言控制规则中蕴含的模糊关系后,就可以根据模糊关系和输入情况,来确定输出 的情况,这就叫“模糊推理”。 4 神经网络? 答:人工神经网络是模拟人脑思维方式的数学模型。神经网络是在现代生物学研究人脑组织成果的基础上提出的,用来模拟人类大脑神经网络的结构和行为,对人脑进行抽象和简化,反映了人脑的基本特征,信息处理、学习、联想、模式分类、记忆等。 5 遗传算法 答:遗传算法将“优胜劣汰,适者生存”的生物进化原理引入优化参数形成的编码串联群体中,按所选择的适配置函数并通过遗传的复制、交叉及变异对个体进行筛选,使适配值高的个体被保留下来,组成新的群体,新的群体既继承了上一代的信息,又优于上一代。这样周而复始,群体中个体适应度不断提高,直到满足一定的条件。 一 专家控制部分 1. 专家系统的组成及各部分特点?
智能控制课程结课作业
智能控制 1对于模糊控制(fuzzy)的认识和体会 模糊控制作为给合传统的基于规则的专家系统、模糊集理论和控制理论的成果而诞生,使其与基于被控过程数学模型的传统控制理论有很大的区别。在模糊控制中,并不是像传统控制那样需要对被控过程进行定量的数学建模,而是试图通过从能成功控制被控过程的领域专家那里获取知识,即专家行为和经验,当被控过程午分复杂甚全“病态”时,建立被控过程的数学校型或者不可能,或者需要高昂的代价。此时模糊控制就显得具有吸引力和实用性。由于人类专家的行为是实现模糊控制的基础,因此,必须用一种容易且有效的方式来表达人类专家的知识。IF-THEN规则格式是这种专家控制知识最和适的表式方式之一,即1F“条件”THEN“结果”,这种表示方式有两个显著的特征:它们是定性的而不是定量的;它们是一种局部知识,这种知识将局部的“条件”与局部的“结果”联系起来,前者可用模糊子集表示,而后者需要模糊蕴涵或模糊关系来表达。然而,当用计算机实现时,这种规则最终需具有数位形式,隶属函数和近似推理为数值表示集合模糊蕴涵提供了一种有利工具。 一个实际的模糊控制系统实现时需要解决三个问题:知识表示、推理策略和知识获取。知识表示是指如何将语言规则用数值方式表示出来;推理策略是指如何根据当前输入“条件”生一个合理的“结果”;知识的获取解决如何获得一组恰当的规则。由于领域专家提供的知识常常是定性的,包含某种不确定性。因此,知识的表示和推理必须是模糊的或近似的,近似推理理论正是为满足这种需要而提出的。近似推理科看做是根据一些不精确的条件推导出个精确结论的过程,许多学者对模糊表示、近似推理进行了大量的研究,在近似推理算法中,最厂泛使用的是关系矩阵模型,它基于L.A.Zadeh的合成推理规则首次由Mamdani采用,由于规则可被解释成逻辑意义上的蕴涵关系,因此人最的蕴涵算子已被提出并应用于实际中由此可见。模糊控制是以模糊集合沦、模糊语言变量及校糊逻辑推理为基础的一种计算机控制,从线性控制与非线性控制的角度分类,模糊井制是一种非线性控制。从控制器智能性看,模糊控制属智能能控制的范畴,而且它已成为日前实现智能控制的一种重要而又有效的形式。尤其是模糊制和神经网络、预测控制、遗传算法和混沌理论等新学科的相结合,正在显示出其巨大的应用潜力。 模糊控制器的基本结构包括以下四部分 1.模糊化 模糊化的作用是将输入的精确量转换成模糊化量,其中输入成份包括外界的参考输入、系统的输出或状态等。模糊化的具体过程如下:首先对这此输入进行处理,以变成模糊控制器要求的输入从。然后将上述己经处理过的输入量进行尺度变换,使其变换到各自的论域范围。在将已经变换到论域范的输入最进行模糊处理,使原先精确的输入带变成模糊量,并用相应的模糊集合来表。 2.知识库 知识库包含了具体应用领域中的知识和要求的控制目标。它通常由数据库和模糊控制规则库两部分组成:1.数据库主要包括各种语言变量的隶属函数,尺度变换因子以及模糊空间的分级数等。2.规则库包括了用模糊语言变量表示的一系列控制规则。它们反映了控制专家的经验和知识。 3.模糊推理 模糊推理是模糊控制器的核心,它具有模拟人的基于模糊概念的推理能力。该推理过程是基于模糊逻辑中的蕴含关系及推理规则来进行的。 4.清晰化 洁晰化的作用是将模糊推理得到的控制量(模糊量)变换为实际用于控制的清晰量,它包
智能控制考试题库
填空题(每空1分,共20分) 控制论的三要素是:信息、反馈和控制。 传统控制是经典控制和现代控制理论的统称。 智能控制系统的核心是去控制复杂性和不确定性。 神经元(即神经细胞)是由细胞体、树突、轴突和突触四部分构成。 按网络结构分,人工神经元细胞可分为层状结构和网状结构按照学习方式分可分为:有教师学习和无教师学习。 前馈型网络可分为可见层和隐含层,节点有输入节点、输出节点、计算单元。 神经网络工作过程主要由工作期和学习期两个阶段组成。 1、智能控制是一门控制理论课程,研究如何运用人工智能的方法来构造控制系统和设计控制器;与自动控制原理和现代控制原理一起构成了自动控制课程体系的理论 基础。 2、智能控制系统的主要类型有:分级递阶控制系统,专家控制系统,学习控制系统,模糊控制系统,神经控制系统,遗传算法控制系统和混合控制系统等等。 3、模糊集合的表示法有扎德表示法、序偶表示法和隶属函数描述法。 4、遗传算法是以达尔文的自然选择学说为基础发展起来的。自然选择学说包括以下三个方面:遗传、变异、适者生存。 5、神经网络在智能控制中的应用主要有神经网络辨识技术和神经网络控制技术。 6、在一个神经网络中,常常根据处理单元的不同处理功能,将处理单元分成输入单元、输出单元和隐层单元三类。 7、分级递阶控制系统:主要有三个控制级组成,按智能控制的高低分为组织级、协调级、执行级,并且这三级遵循“伴随智能递降精度递增”原则。 传统控制方法包括经典控制和现代控制,是基于被控对象精确模型的控制方式,缺乏灵活性和应变能力,适于解决线性
、时不变性等相对简单的控制。 智能控制的研究对象具备以下的一些特点:不确定性的模型、高度的非线性、复杂的任务要求。 IC(智能控制)=AC(自动控制)∩AI(人工智能) ∩OR(运筹学) AC:描述系统的动力学特征,是一种动态反馈。 AI :是一个用来模拟人思维的知识处理系统,具有记忆、学习、信息处理、形式语言、启发推理等功能。OR:是一种定量优化方法,如线性规划、网络规划、调度、管理、优化决策和多目标优化方法等。 智能控制:即设计一个控制器,使之具有学习、抽象、推理、决策等功能,并能根据环境信息的变化作出适应性,从而实现由人来完成的任务。 智能控制的几个重要分支为模糊控制、神经网络控制和遗传算法。 智能控制的特点:1,学习功能2,适应功能3,自组织功能4,优化功能 智能控制的研究工具:1,符号推理与数值计算的结合2,模糊集理论3,神经网络理论4,遗传算法5,离散事件与连续时间系统的结合。 智能控制的应用领域,例如智能机器人控制、计算机集成制造系统、工业过程控制、航空航天控制和交通运输系统等。 10、专家系统:是一类包含知识和推理的智能计算机程序,其内部包含某领域专家水平的知识和经验,具有解决专门问题的能力。 11、专家系统的构成:由知识库和推理机(知识库由数据库和规则库两部分构成) 18、专家控制的特点:灵活性、适应性和鲁棒性。 19、模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法。,它从行为上模仿人的模糊推理和决策过程。 20、模糊控制理论具有一些明显的特点:1,模糊控制不需要被控对象的数学模型2,
智能控制系统课程设计
目录 有害气体的检测、报警、抽排.................. . (2) 1 意义与要求 (2) 1.1 意义 (2) 1.2 设计要求 (2) 2 设计总体方案 (2) 2.1 设计思路 (2) 2.2 总体设计方框图 2.3 完整原理图 (4) 2.4 PCB制图 (5) 3设计原理分析 (6) 3.1 气敏传感器工作原理 (7) 3.2 声光报警控制电路 (7) 3.3 排气电路工作原理 (8) 3.4 整体工作原理说明 (9) 4 所用芯片及其他器件说明 (10) 4.1 IC555定时器构成多谐振荡电路图 (11) 5 附表一:有害气体的检测、报警、抽排电路所用元件 (12) 6.设计体会和小结 (13)
有害气体的检测、报警、抽排 1 意义与要求 1.1.1 意义 日常生活中经常发生煤气或者其他有毒气体泄漏的事故,给人们的生命财产安全带来了极大的危害。因此,及时检测出人们生活环境中存在的有害气体并将其排除是保障人们正常生活的关键。本人运用所学的电子技术知识,联系实际,设计出一套有毒气体的检测电路,可以在有毒气体超标时及时抽排出有害气体,使人们的生命健康有一个保障。 1.2 设计要求 当检测到有毒气体意外排时,发出警笛报警声和灯光间歇闪烁的光报警提示。当有毒气体浓度超标时能自行启动抽排系统,排出有毒气体,更换空气以保障人们的生命财产安全。抽排完毕后,系统自动回到实时检测状态。 2 设计总体方案 2.1 设计思路 利用QM—N5气敏传感器检测有毒气体,根据其工作原理构成一种气敏控制自动排气电路。电路由气体检测电路、电子开关电路、报警电路、和气体排放电路构成。当有害气体达到一定浓度时,QM—N5检测到有毒气体,元件两极电阻变的很小,继电器开关闭合,使得555芯片组成的多谐电路产生方波信号,驱动发光二极管间歇发光;同时LC179工作,驱使蜂鸣器间断发出声音;此时排气系统会开始抽排有毒气体。当气体被排出,浓度低于气敏传感器所能感应的范围时,电路回复到自动检测状态。
智能控制试卷A答案
常州工学院继续教育学院 武进函授站20学年第学期科目试卷:传感器原理试卷类型:A(A或B) 姓名:学号:班级:20级机电一体化专科 总分 题号一二三四五六题目分值 评卷人得分 一、填空题() 1、控制论的三要素是:信息、反馈和控制。 2、传统控制是经典控制和现代控制理论的统称。 3、智能控制系统的核心是去控制复杂性和不确定性。 4、神经元(即神经细胞)是由细胞体、树突、轴突和突触四部分构成。 5、按网络结构分,人工神经元细胞可分为层状结构和网状结构,按照学习方式分可分为有教师学习和无教师学习。 6、前馈型网络可分为可见层和隐含层,节点有输入节点、输出节点、计算单元。 7、神经网络工作过程主要由工作期和学习期两个阶段组成。 二、判断题() 1、对反馈网络而言,稳定点越多,网络的联想与识别能力越强,因此,稳定点的数据目越多联想功能越好。(错) 2、简单感知器仅能解决一阶谓词逻辑和线性分类问题,不能解决高阶谓词和非线分类问题。(对) 3、BP算法是在无导师作用下,适用于多层神经元的一种学习,它是建立在相关规则
的基础上的。(错) 4、在误差反传训练算法中,周期性函数已被证明收敛速度比S型函数慢。(错) 5、基于BP算法的网络的误差曲面有且仅有一个全局最优解。(错) 6、对于前馈网络而言,一旦网络的用途确定了,那么隐含层的数目也就确定了。(错) 7、对离散型HOPFIELD网络而言,如权矩阵为对称阵,而且对角线元素非负,那么网络在异步方式下必收敛于下一个稳定状态。(对) 8、对连续HOPFIELD网络而言,无论网络结构是否对称,都能保证网络稳定。(错) 9、竞争学习的实质是一种规律性检测器,即是基于刺激集合和哪个特征是重要的先验概念所构造的装置,发现有用的部特征。(对) 10、人工神经元网络和模糊系统的共同之处在于,都需建立对象的精确的数学模型,根据输入采样数据去估计其要求的决策,这是一种有模型的估计。(错) 三、简答题() 1、智能控制系统有哪些类型? 答:1)多级递阶智能控制2)基于知识的专家控制3)基于模糊逻辑的智能控制——模糊控制4)基于神经网络的智能控制——神经控制5)基于规则的仿人智能控制6)基于模式识别的智能控制7)多模变结构智能控制8)学习控制和自学习控制9)基于可拓逻辑的智能控制——可拓控制10)基于混沌理论的智能控制——混沌控制 2、比较智能控制与传统控制的特点? 答:1)传统控制方法在处理复杂性、不确定性方面能力低而且有时丧失了这种能力,智能控制在处理复杂性、不确定性方面能力高2)传统控制是基于被控对象精确模型的控制方式,可谓“模型论”智能控制是智能决策论,相对于“模型论”可
智能控制课程设计报告书
《智能控制》课程设计报告题目:采用BP网络进行模式识别院系: 专业: 姓名: 学号: 指导老师: 日期:年月日
目录 1、课程设计的目的和要求 (3) 2、问题描述 (3) 3、源程序 (3) 4、运行结果 (6) 5、总结 (7)
课程设计的目的和要求 目的:1、通过本次课程设计进一步了解BP网络模式识别的基本原理,掌握BP网络的学习算法 2、熟悉matlab语言在智能控制中的运用,并提高学生有关智能控制系统的程序设计能力 要求:充分理解设计容,并独立完成实验和课程设计报告 问题描述 采用BP网络进行模式识别。训练样本为3对两输入单输出样本,见表7-3。是采用BP网络对训练样本进行训练,并针对一组实际样本进行测试。用于测试的3组样本输入分别为1,0.1;0.5,0.5和 0.1,0.1。 表7-3 训练样本 说明:该BP网络可看做2-6-1结构,设权值wij,wjl的初始值取【-1,+1】之间的随机值,学习参数η=0.5,α=0.05.取网络训练的最终指标E=10^(-20),在仿真程序中用w1,w2代表wij,wjl,用Iout代表 x'j。 源程序 %网络训练程序
clear all; close all; xite=0.50; alfa=0.05; w2=rands(6,1); w2_1=w2;w2_2=w2; w1=rands(2,6); w1_1=w1;w1_2=w1; dw1=0*w1; I=[0,0,0,0,0,0]'; Iout=[0,0,0,0,0,0]'; FI=[0,0,0,0,0,0]'; k=0; E=1.0; NS=3; while E>=1e-020 k=k+1; times(k)=k; for s=1:1:NS xs=[1,0; 0,0; 0,1]; ys=[1,0,-1]'; x=xs(s,:); for j=1:1:6 I(j)=x*w1(:,j); Iout(j)=1/(1+exp(-I(j))); end y1=w2'*Iout;
2011-10学年第1学期_ 智能控制试题A答案
(勤奋、求是、创新、奉献) 2010~2011学年第1学期考试试卷A 学院班级__ __ 姓名__________ 学号___________ 《智能控制系统》课程试卷 (本卷考试时间90 分钟) 一. 1.写出4种专家系统的知识表示方法。 逻辑表示法、产生式表示法、框架表示法、语义网络表示法 2.递阶智能系统的智能程度分布一般要遵循什么原则。 随着智能程度的提高,精度下降 3.写出宽度优先搜索和深度优先搜索的根本区别? 深度优先与宽度优先算法最根本的不同在于:扩展的后继节点放在OPEN表的前端。 4.何谓多层前向神经网络? 具有分层的结构,通常包括输入层、隐层(也称中间层)和输出层。每一层的神经元只接受上一层神经元的输入,并且该层神经元的输出送给下一层的各个神经元。 5.写出3种模糊输出向量的解模糊方法 重心法、最大隶属度法、取中位数判决法
6.写出基本遗传算法的3个基本操作 遗传、交叉、变异 二、简答题(共24分,每题6分) 1、简述模糊控制器的组成,及各组成部分功能 (1)模糊化接口 对于任意输入x,将其映射到模糊集系统中去,映射的过程实际上是将当前的物理输入根据模糊子集的分布情况确定出此时此刻输入值对这些模糊子集的隶属程度。 (2)知识库 知识库包括数据库和规则库。模糊控制器设计的关键在于如何有效地建立知识库,决策逻辑控制实际上是依赖规则库来实现的。 (3)推理决策逻辑 它是模糊控制的核心,利用知识库的信息模拟人类的推理决策过程,给出适合的控制量,其实质是模糊逻辑推理。 (4)精确化过程 通过模糊推理得到的结果是一个模糊集合。但实际使用中,特别是模糊控制中,必须要有一个确定的值才能去控制或驱动执行机构。在推理得到的模糊集合中取一个能最佳代表这个模糊推理结果可能性的精确值的过程称为精确化过程 2、设个体域是人类,试用两种方法(全称量词和存在量词)将语句“没有不犯错误的人”译为谓词公式 设F(x):“x犯错误”,M(x):x是人,则语句形式化为: ┐?x(M(x)∧┐F(x)) 或?x(M(x)→F(x)) 3、简述BP算法中工作信号正向传播、误差信号反向传播过程 (1)工作信号正向传播:输入信号从输入层经隐层,传向输出层,在输出端产生输出信号,这是信号的正向传播。在信号向前传递过程中网络的权值是固定不变的,每一层神经元的状态只影响下一层神经元的状态。如果在输出层不能得到期望的输出,则转入误差信号反向传播。 (2)误差信号反向传播:网络的实际输出与期望输出之间差值即为误差信号,误差信号由输出端开始逐层向前传播,这是误差信号的反向传播。在误差信号反向传播的过程中,网络权值由误差反馈进行调节,通过权值的不断修正使网络的实际输出更接近期望输出 W
智能控制导论复习题
试题 一、名词解释 1.智能 2. 自动控制 3. 专家控制系统 4. 学习控制 5. 免疫算法 6.信息7. 智能控制系统8. 专家系统9. 学习控制系统10. 人工免疫系统 11.信息论12. 黑板13. 模糊判决14. 学习系统15. 选择操作 二、填空题 16. 免疫系统在受到外界病菌的感染后,能够通过自身的免疫机制恢复健康以保持正常工作的一种特性称为免疫系统的。 17.智能控制是采用驱动智能机器实现其目标的过程 18.知识是人们通过体验、学习或联想而知晓的对客观世界。 19.与学习系统相似,学习控制系统分为在线学习控制系统和控制系统两类。 20.基于模式识别的学习控制系统,可被推广为一个具有在线特征辨识的分层递阶结构,该控制系统由三级组成,即组织级、和执行控制级。 21. 真体的行动受其心理状态驱动,人类心理状态的要素有认知、情感、三种。 22.神经网络主要通过两种学习算法进行训练,即无师学习算法和。 23.神经网络自适应控制和常规自适应控制一样,也分为两类,即和模型参考自适应控制。 24.实现学习控制系统需要三种能力:性能反馈、、训练。 25,遗传算法是模仿和自然选择机理,通过人工方式构造的一类优化搜索算法。 26. 把智能控制与传统控制有机地组合起来,即可构成系统。 27.人们通过体验、学习或联想而知晓的对客观世界规律性的认识是。 28.间接进化控制是由作用于系统模型,再综合系统状态输出与系统模型输出作用于进化学习,然后,系统在应用一般闭环反馈控制原理构成进化控制系统。 29. 仿人控制研究的主要目标不是控制对象,而是控制器本身如何对控制专家结构和的模拟。
《智能控制》课程考试试题B及答案
《智能控制》课程考试试题B
《智能控制》课程考试试题B参考答案 一、填空题 (1) 高级机器人 (2) 智能规划与调度 (3) 自动制造系统 (4) 故障检测与诊断 (5) 小深(Deep Junior) (6) 卡斯帕洛夫(Kasparov) (7) 硬件 (8) 软件 (9) 智能 (10) 智能化 (11) 选择模糊控制器的结构 (12) 选取模糊控制规则 (13) 确定模糊化的解模糊策略,制定控制表 (14) 确定模糊控制器的参数 (15) 傅京孙 (16) 萨里迪斯 (17) 蔡自兴 (18) 生物的进化机制 (19) 进化计算 (20) 反馈机制 二、选择题 1、C 2、A 3、A 4、C 5、D 6、D 7、B 8、C 9、A 10、C 三、问答题 1、答:在研究了智能控制的二元、三元结构理论、知识、信息和智能的定义以及各相关学科的关系之后。蔡自兴教授提出了四元智能控制结构,把智能控制看作是自动控制、人工智能、信息论和运筹学四个学科的交集,如图1所示,其关系可用下式来描述。
IC = AI ∩ CT ∩ IT ∩ OR 图1 智能控制的四元结构 把信息论作为智能控制结构的一个子集是基于下列理由的: (1) 信息论是解释知识和智能的一种手段; (2) 控制论、系统论和信息论是紧密相互作用的; (3) 信息论已成为控制智能机器的工具; (4) 信息熵成为智能控制的测度; (5) 信息论参与智能控制的全过程,并对执行级起到核心作用。 2、答:传统控制理论在应用中面临的难题包括: (1) 传统控制系统的设计与分析是建立在精确的系统数学模型基础上的,而实际系统由于存在复杂性、非线性、时变性、不确定性和不完全性等,一般无法获得精确的数学模型。 (2) 研究这类系统时,必须提出并遵循一些比较苛刻的假设,而这些假设在应用中往往与实际不相吻合。 (3) 对于某些复杂的和包含不确定性的对象,根本无法以传统数学模型来表示,即无法解决建模问题。 (4) 为了提高性能,传统控制系统可能变得很复杂,从而增加了设备的初投资和维修费用,降低系统的可靠性。 传统控制理论在应用中面临的难题的解决,不仅需要发展控制理论与方法,而且需要开发与应用计算机科学与工程的最新成果。人工智能的产生和发展正在为自动控制系统的智能化提供有力支持。人工智能影响了许多具有不同背景的学科,它的发展已促进自动控制向着更高的水平──智能控制发展。 智能控制具有下列特点: (1) 同时具有以知识表示的非数学广义模型和以数学模型(含计算智能模型与算法)表示的混合控制过程,也往往是那些含有复杂性、不完全性、模糊性或不确定性以及不存在已知算法的过程,并以知识进行推理,以启发式策略和智能算法来引导求解过程。 (2) 智能控制的核心在高层控制,即组织级。高层控制的任务在于对实际环境或过程进行组织,即决策和规划,实现广义问题求解。 (3) 智能控制是一门边缘交叉学科。实际上,智能控制涉及更多的相关学科。智能控制的发展需要各相关学科的配合与支援,同时也要求智能控制工程师是个知识工程师。 (4) 智能控制是一个新兴的研究领域。无论在理论上或实践上它都还很不成熟、很不完善,需要进一步探索与开发。 3、答:传统控制理论在应用中面临的难题包括: (1) 传统控制系统的设计与分析是建立在精确的系统数学模型基础上的,而实际系统由于存在复杂性、非线性、时变性、不确定性和不完全性等,一般无法获得精确的数学模型。 (2) 研究这类系统时,必须提出并遵循一些比较苛刻的假设,而这些假设在应用中往往与实际不相吻合。 (3) 对于某些复杂的和包含不确定性的对象,根本无法以传统数学模型来表示,即无法解决建模问题。 (4) 为了提高性能,传统控制系统可能变得很复杂,从而增加了设备的初投资和维修费用,降低系统的可靠性。
昆工智能控制试题及答案
一、填空题 1.智能控制是一门新兴的学科,它具有非常广泛的应用领域,例 如、、和。 1、交叉学科在机器人控制中的应用在过程控制中的应用飞行器控制 2.传统控制包括和。2、经典反馈控制现代理论控制 3.一个理想的智能控制系统应具备的基本功能是、、和。 3 、学习功能适应功能自组织功能优化能力 4.智能控制中的三元论指的是:、和。 4、运筹学,人工智能,自动控制 5.近年来,进化论、、和等各门学科的发展给智能控制注入了巨大的活力,并由此产生了各种智能控制方法。 5、神经网络模糊数学专家系统 6.智能控制方法比传统的控制方法更能适应对象的、和 。6、时变性非线性不确定性 7.傅京逊首次提出智能控制的概念,并归纳出的3种类型智能控制系统是 、和。 7、人作为控制器的控制系统、人机结合作为控制器的控制系统、无人参与的自主控 制系统 8、智能控制主要解决传统控制难以解决的复杂系统的控制问题,其研究的对象具备的3个特点为、和。 8、不确定性、高度的非线性、复杂的任务要求 9.智能控制系统的主要类型有、、、 、和。 9、分级递阶控制系统,专家控制系统,神经控制系统,模糊控制系统,学习控制系统,集成或者(复合)混合控制系统 10.智能控制的不确定性的模型包括两类:(1) ; (2) 。 10、(1)模型未知或知之甚少;(2)模型的结构和参数可能在很大范围内变化。11.控制论的三要素是:信息、反馈和控制。 12.建立一个实用的专家系统的步骤包括三个方面的设计,它们分别是、和。知识库的设计推理机的设计人机接口的设计13.专家系统的核心组成部分为和。知识库、推理机 14.专家系统中的知识库包括了3类知识,它们分别为、、和。判断性规则控制性规则数据 15.专家系统的推理机可采用的3种推理方式为推理、和推理。 15、正向推理、反向推理和双向推理 16.根据专家控制器在控制系统中的功能,其可分为和。
智能控制课后习题
作业1 1 简述智能控制的概念。 定义一: 智能控制是由智能机器自主地实现其目标的过程。 定义二:K.J.奥斯托罗姆则认为,把人类具有的直觉推理和试凑法等智能加以形式化或机器模拟,并用于控制系统的分析与设计中,以期在一定程度上实现控制系统的智能化,这就是智能控制。 定义三: 智能控制是一类无需人的干预就能够自主地驱动智能机器实现其目标的自动控制,也是用计算机模拟人类智能的一个重要领域。 2 智能控制由哪几部分组成?各自的特点是什么? 智能控制由人工智能、自动控制、运筹学组成。 人工智能是一个知识处理系统,具有记忆、学习、信息处理、形式语言、启发推理等功能。 自动控制描述系统动力学特性,是一种动态反馈。 运筹学是一种定量优化的方法。如线性优化,网络规划,调度管理,优化决策和多目标优化的方法等等。 3 比较智能控制和传统控制的特点? 1)传统控制方法在处理复杂性、不确定性方面能力低而且有时丧失了这种能力,智能控制在处理复杂性、不确定性方面能力高 2)传统控制是基于被控对象精确模型的控制方式,可谓“模型论”智能控制是智能决策论,相对于“模型论”可称为“控制论” 3)传统的控制为了控制必须建模,而利用不精确的模型又采用摸个固定控制算法,使整个的控制系统置于模型框架下,缺乏灵活性,缺乏应变性,因此很难胜任对复杂系统的控制智能控制的可信是控制决策,次用灵活机动的决策方式迫使控制朝着期望的目标逼近。 4)传统控制适用于解决线性、时不变等相对简单的的控制问题智能控制是对传统控制理论的发展,传统控制室智能控制的一个组成部分,是智能控制的低级阶段。 4 智能控制有哪些应用领域?试举出一个应用实例。 应用领域:模糊系统、神经网络、专家控制、工业想、系统、电力系统、机器人等其他领域的控制。 应用实例:模糊控制的交流伺服系统 作业2
智能控制课程设计报告书
《智能控制》课程设计报告 题目:采用BP网络进行模式识别院系: 专业: 姓名: 学号: 指导老师:
日期:年月日 目录 1、课程设计的目的和要求 (3) 2、问题描述 (3) 3、源程序 (3) 4、运行结果 (6) 5、总结 (7)
课程设计的目的和要求 目的:1、通过本次课程设计进一步了解BP网络模式识别的基本原理,掌握BP网络的学习算法 2、熟悉matlab语言在智能控制中的运用,并提高学生有关智能控制系统的程序设计能力 要求:充分理解设计内容,并独立完成实验和课程设计报告 问题描述 采用BP网络进行模式识别。训练样本为3对两输入单输出样本,见表7-3。是采用BP网络对训练样本进行训练,并针对一组实际样本进行测试。用于测试的3组样本输入分别为1,0.1;0.5,0.5和 0.1,0.1。 输入输出 1 0 1
0 0 0 0 1 -1 表7-3 训练样本 说明:该BP网络可看做2-6-1结构,设权值wij,wjl的初始值取【-1,+1】之间的随机值,学习参数η=0.5,α=0.05.取网络训练的最终指标E=10^(-20),在仿真程序中用w1,w2代表wij,wjl,用Iout代表 x'j。 源程序 %网络训练程序 clear all; close all; xite=0.50; alfa=0.05; w2=rands(6,1);
w2_1=w2;w2_2=w2; w1=rands(2,6); w1_1=w1;w1_2=w1; dw1=0*w1; I=[0,0,0,0,0,0]'; Iout=[0,0,0,0,0,0]'; FI=[0,0,0,0,0,0]'; k=0; E=1.0; NS=3; while E>=1e-020 k=k+1; times(k)=k; for s=1:1:NS xs=[1,0;
智能控制-考试题(附答案)
《智能控制》考试试题 试题1: 针对某工业过程被控对象:0.520 ()(101)(21) s G s e s s -= ++,试分别设计常规PID 算法控制器、模糊控制器、模糊自适应PID 控制器,计算模糊控制的决策表,并进行如下仿真研究及分析: 1. 比较当被控对象参数变化、结构变化时,四者的性能; 2. 研究改善Fuzzy 控制器动、静态性能的方法。 解: 常规PID 、模糊控制、Fuzzy 自适应PID 控制、混合型FuzzyPID 控制器设计 错误!未找到引用源。. 常规PID 调节器 PID 控制器也就是比例、积分、微分控制器,是一种最基本的控制方式。它是根据给定值()r t 与实际输出值()y t 构成控制偏差()e t ,从而针对控制偏差进行比例、积分、微分调节的一种方法,其连续形式为: 1 () ()[()()]t p d i de t u t K e t e t dt T T dt =+ +? (1.1) 式中,p K 为比例系数,i T 为积分时间常数,d T 为微分时间常数。 PID 控制器三个校正环节中p K ,i T 和d T 这三个参数直接影响控制效果的好坏,所以要取得较好的控制效果,就必须合理地选择控制器的参数。 Ziegler 和Nichols 提出的临界比例度法是一种非常著名的工程整定方法。通过实验由经验公式得到控制器的近似最优整定参数,用来确定被控对象的动态特性的两个参数:临界增益u K 和临界振荡周期u T 。 用临界比例度法整定PID 参数如下: 表1.1 临界比例度法参数整定公式 控制器类型 P K i T d T P 0.5u K ∞ 0 PI 0.455u K 0.833u T