基于矢量水听器的水下目标定位系统
基于矢量水听器单通道瞬时相位差加权的水下目标测向方法

基于矢量水听器单通道瞬时相位差加权的水下目标测向方法矢量水听器是一种水下声学探测器,它能够接收并解码水下声源信号的振动信息。
通过矢量水听器可以得到目标在海底中的方位信息,方便水下目标的跟踪和监测。
在实际应用中,由于海水中信号传播的复杂性以及水听器自身的各种误差,水下目标测向仍然是一个具有挑战性的问题。
本文将介绍一种基于矢量水听器单通道瞬时相位差加权的水下目标测向方法。
1. 矢量水听器的基本原理矢量水听器是由两个或多个水听器组成的阵列,水听器之间相互独立,每个水听器都可以接收到目标声源的信号。
通过对接收到的信号进行分析处理,可以得到目标在海底中的方位信息。
2. 水下目标测向的常用方法常用的水下目标测向方法有双通道测向法、三通道测向法、基于时延算法的测向法、基于矢量合成的测向法等。
3. 基于矢量水听器单通道瞬时相位差加权的水下目标测向方法基于矢量水听器单通道瞬时相位差加权的水下目标测向方法,主要是通过对单个水听器接收到的信号的处理,来实现目标的测向。
具体方法如下:(1)获取接收信号的幅度、相位等信息。
(2)通过相位和幅度信息得到瞬时相位差。
(3)对瞬时相位差进行加权处理,以消除水听器自身的误差和海水传播的误差。
(4)通过加权后的瞬时相位差来计算目标的方位角。
(5)采用最小二乘法或者其他算法,对目标的测向角度进行优化。
4. 实验结果分析通过实验结果分析可以得到,基于矢量水听器单通道瞬时相位差加权的水下目标测向方法,具有测向精度高、系统成本低等优势。
在实际应用中,可以通过该方法来实现水下目标的实时跟踪和监测。
5. 结论本文提出了一种基于矢量水听器单通道瞬时相位差加权的水下目标测向方法,通过实验验证该方法具有测向精度高、系统成本低等优势,可以有效地实现水下目标的跟踪和监测。
在后续的研究中,可以进一步优化该方法,以适应不同应用场景的需求。
基于MEMS仿生矢量水听器的水声定向研究

关键词 :ME MS矢量水 听器 ;数字信号处理 ;波束形成 ; 定 向
中 图分 类 号 :T B5 6 5 . 1 文 献标 识 码 :A 文 章 编 号 :1 0 0 0 - 9 7 8 7 ( 2 0 1 3 ) 0 6 - 0 0 1 5 - 0 3
Re s e a r c h o n u nd e r wa t e r a c o u s t i c o r i e nt a t i o n ba s e d
Ke y wor ds: M EM S v e c t o r h y d r o ph o n e;DS P; b e a m f o m i r ng;o r i e nt a t i o n
0 引 言
主要利用波束形成原 理 , 根 据矢量水 听器 的信号处理 基本
原理 , 对矢量水 听器 的信号 经过 放大调理 电路处理后 , 通过 D S P芯片进行模/ 数转换 , 对转换后 的数据进行处理并最 终在显示器上显示方位估 计角度 , 从 而实现矢 量水 听器的
S c i e n c e a n d Te c h n o l o g y o n El e c t r o n i c Te s t& M e a s u r e me n t La b o r a t o y . r
N o r t h U n i v e r s i t y o f C h i n a . T a i y u a n 0 3 0 0 5 1 , C h i n a )
极子 自然指 向性 。单一 的矢量 水听器就能够测量水 中的声压 和质点振速 。利用 矢量水 听器 的这种特性 ,
结合波束形成原理 , 采用数字信号处理 ( D S P ) 技术 , 设计 了基于 M E MS仿生矢量 水听器 的水声 定 向系统 ,
基于矢量传感器的水下运动目标测向的研究

Z HAN a l, HAO J n w iZ GF- Z i u - e , HANG Yi- ig n bn
( ol eo r eE g er g N r w s r o t h ia U iesy X ’ 0 2 C ia C l g f i n i e n , ot et nP l e ncl nvr t, i n 7 0 7 , hn ) e Ma n n i h e yc i a 1
o c r e srS R( i a t- os ao o eac rc f i c o sma o n l e . h sl f et - no ,N Sg loN i R t ) nt cuayo r t net t ni aay d T er u s v os n - e i h d ei i i s z e t
基于矢量信号处理的水下目标定位和跟踪设计
s ge pa om e rn i l lt r b ai g—o l r e tt se t t n n f ny t g t ae s mai .Ac o d n h e r g e t t n o e u d r ae r e c a s i o c r i gt t eb a i si i f h n e t r a g t — o n ma o t w t a q i d b ep s ie g n o ty t r e v c o e s r lme t r o i e t n td me u i ga ry o l u r y t a sv o imer , h e e trs n o e ns a ec mb n d i oa u i a r r .F r e h e n n e s n a moe
关键 词 : 站 纯方 位 目标 定位 ; 元 联 合测 量 阵 ; 延 单 三 时
中 图分 类 号 :] 9 . 1P 19 3 文 献标 识 码 : A
Ta g t Lo a i a i n nd Tr c i g De i n s d n r e c lz to a a k n sg Ba e o
Ve t r S g l o e s c o i na Pr c s
ZHANG n Yi g—y n i g,DU i—b n,HOU Gu n L i a g—l ,ZHANG n i Yi g
(ntueo caor hcIs u et S adn cdm f c ne , i doS adn 6 0 1 C ia Istt f eng p i nt m n, h ogA ae yo i cs Qn a h og26 0 ,h ) i O a r n Se g n n
基于矢量水听器线谱法目标方位估计
(colo nom t n Sine ad E g er g otes U i ri ,N nig 2 09 ,C ia S ho fIfr ai cec n n i e n ,S u at nv sy aj 10 6 hn ) o n i h e t n
1 引 言
水 下 目标 探测主要 由声呐来实现 。声 呐分为 主动 式和被动式两种 。 虽然声呐有主动式 和被 动式之分 , 但
2 互谱 法方 位 估 计 原理
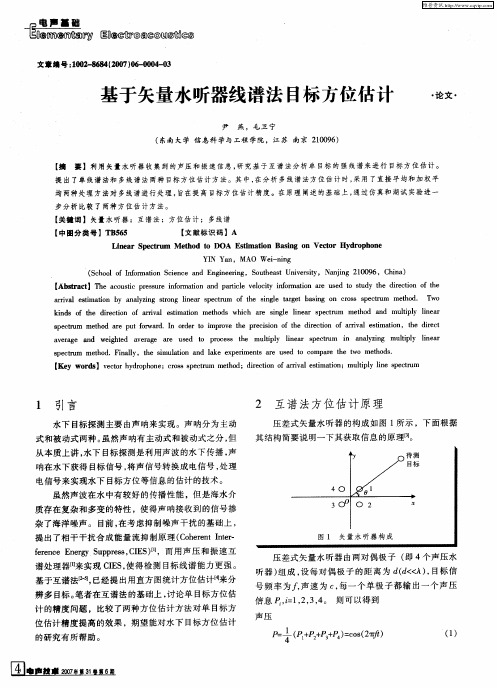
压 差 式 矢 量 水 听 器 的 构 成 如 图 1 示 ,下 面 根 所
其结构 简要说 明一 下其获取信息的原理园 。
s e t m t o .F n l p cr u meh d i al y.t e smu ain a d lk x e me t a e u e o c mp r h w t o s h i lt n a e e p r n s r s d t o a e t e t o meh d . o i
k n s f t e d r c in f arv l s ma in id o h ie t o r a e t t meh d w ih a e i g e i e r p c r m meh d n d o i i o t o s h c r sn l l a s e t n u t o a mu t l i e r lpy n a i l s e t m t o r u o w r .I r e o i r v h r cso f t e d r ci n o ria si to D cr u meh d a e p tf r a d n o d r t mp o e t e p e i n o h i t f a r l e t i e o v main, t e d r c h i t e a e a e n w ih e a e a e r u e t p o e s h mu t l l e r p cr m i a ay i g v r g a d e g t d v r g a e s d o r c s t e l p y i a s e t i n u n n lzn mu t l l e r lpy i a i n
基于单矢量水听器四种方位估计方法

文章编号:100529865(2006)0120122206基于单矢量水听器四种方位估计方法姚直象1,2,惠俊英1,殷敬伟1,杨 娟1(1.哈尔滨工程大学水声工程学院,黑龙江哈尔滨 150001;2.海军工程大学电子工程学院,湖北武汉 430033)摘 要:单矢量水听器能同时拾取声场的声压和振速信息,可以估计目标方位。
根据不同的噪声背景和信号形式,单矢量水听器有多种方位估计方法。
平均声强器的处理方法能很好地抗各向同性的非相干干扰;线谱方位估计能有效检测辐射线谱信号的目标,并进行目标方位估计。
当宽带信号中存在线谱相干干扰,以及线谱信号被宽带相干噪声干扰时,上述两种方法不能检测目标。
为解决这个问题,新提出了直方图和加权直方图两种方法,直方图方位估计法能抗强线谱相干干扰,并能区分含线谱的多目标;加权直方图方位估计法能从宽带相干干扰中检测目标,估计目标方位。
并着重介绍了后两种方法的原理,对四种方法进行了计算机仿真,并用海试结果验证了上述结论。
关键词:单矢量水听器;信号处理;直方图;方位估计;平均声强器;相干干扰中图分类号:T B56 文献标识码:AF our approaches to DOA estimation based on a single vector hydrophoneY AO Zhi 2xiang 1,2,H UI Jun 2ying 1,YI N Jing 2wei 1,Y ANGJuan 1(1.C ollege of Underwater Acoustic Engineering ,Harbin Engineering University ,Harbin 150001,China ;2.C ollege of E lectronic Engineer 2ing ,Navy Engineering University ,Wuhan 430033,China )Abstract :A single vector hydrophone can be used in DOA estimation.According to different existences of noise background and signals ,there are several approaches to azimuth angle estimation based on a single vector hydrophone.Acoustic intensity averager can effectively suppress is otropic non 2coherent interference.Based on line 2spectra we can effectively detect the target radiating line 2spectra.But the tw o methods cann ’t do well in the condition of either line 2spectra coherent interference lying in broadband signal or broadband coherent interference lying in line 2spectra signal.T w o new approaches are put forward.One is bar graph approach which can suppress line 2spectra coherent interference and i 2dentify different targets radiating line 2spectra.The other is weighted bar graph approach which can detect a target in broadband coherent inter 2ference and estimate its azimuth angle.The principles of the tw o are introduced.S imulations of the 4approaches based on computer are given.The result of trial in sea validates these conclusions.K ey w ords :single vector hydrophone ;signal processing ;bar graph ;DOA estimation ;acoustic intensity averager ;coherent interference收稿日期:2004212213作者简介:姚直象(1976-),男,江西人,博士研究生,主要从事水声信号处理专业方面的研究。
单矢量水听器水中多目标方位跟踪方法
单矢量水听器水中多目标方位跟踪方法张维;尚玲【摘要】The direction of arrival (DOA) of multiple targets was acquired by solving non-liner correlation equations involving acoustic pressure and particle velocity with quantum particle swarm algorithm.In order to improve the precision, the DOA tracks of multiple targets were fitted with the method of least squares, the prediction model was found and then the DOA tracks were optimized by Kalman filter.The results indicate that the DOA of multiple targets can be resolved with the single vector hydrophone and the results should be expressed by statistic characteristics.The maximum number of unknown sources is 7.As the number increases, the DOA error is more serious.When the signal to noise ratio is higher, the resolution ratio and precision are also higher and the deviation is smaller.More importantly, the precision of DOA can be improved effectively by the method of data fitting and the Kalman filter.%采用量子粒子群求解声压和质点振速组成的非线性相关方程组,实现多目标声源方位的估计.为提高精度,应用最小二乘法对测量结果进行拟合并建立预测模型,通过卡尔曼滤波对方位轨迹进行优化.结果表明:单矢量水听器能够同时分辨多个目标方位,解算结果应使用统计特性表示;采用本方法最多能分辨7个目标,目标个数越多,方位误差越大;信噪比越高,分辨率和精度越高,偏差越小;通过数据拟合然后卡尔曼滤波的方法能够有效提高目标方位跟踪精度.【期刊名称】《国防科技大学学报》【年(卷),期】2017(039)002【总页数】6页(P114-119)【关键词】多目标方位;单矢量水听器;卡尔曼滤波;最小二乘法;量子粒子群【作者】张维;尚玲【作者单位】中国船舶重工集团公司第七一〇研究所, 湖北宜昌 443003;中国船舶重工集团公司第七一〇研究所, 湖北宜昌 443003【正文语种】中文【中图分类】TN911.7单个矢量水听器能同时拾取声压和质点振速信息,在各向同性噪声背景中,采用平均声强器[1-2]、最大似然检测[3-4]、互谱法[5]就可以对目标进行定向。
基于矢量水听器单通道瞬时相位差加权的水下目标测向方法
基于矢量水听器单通道瞬时相位差加权的水下目标测向方法矢量水听器是一种用于水下信号处理、目标定位和追踪等应用的设备。
在水下目标测向中,瞬时相位差(Instantaneous Phase Difference,IPD)是一种常用的参数,用于确定目标的角度和距离。
本文介绍一种基于矢量水听器单通道IPD加权的测向方法。
矢量水听器矢量水听器一般由两个或多个水听器组成,可用于测量水下声源的方向、距离和速度等参数。
常见的矢量水听器包括两个传统水听器(Traditional Hydrophones,TH)和四个水听器矢量水听器(Vector Sensors,VS)。
TH只能测量水声信号的强度和相对延迟,因此无法确定目标的方向和距离。
VS可以测量水声信号的强度、相对延迟和瞬时相位差,因此可用于确定目标的方向和距离。
瞬时相位差瞬时相位差是两个水听器接收到信号的相位差,与信号的相对延迟相关。
在一个稳态假设下,可以将瞬时相位差表示为:$$ \\Delta \\phi_i(t) = \\frac{2\\pi f_i}{c} \\Delta x_i(t) - \\theta_i(t) $$其中,i表示矢量水听器的编号,f i表示水声信号的频率,c表示声速,$\\Delta x_i(t)$表示水声信号相对于两个水听器之间的间距的变化量,$\\theta_i(t)$表示相位偏移量。
测向方法基于瞬时相位差的测向方法有很多种,常用的方法包括交叉谱、互相关、MVDR和泰勒展开等。
这些方法都需要使用多个水听器来测量瞬时相位差,并对信号进行复杂的信号处理。
在某些情况下,使用多个水听器可能会增加复杂度和成本,并且在实际应用中可能会受到噪声和多径干扰的影响。
为了简化目标测向的过程,我们提出一种基于矢量水听器单通道IPD加权的测向方法。
该方法只使用一个矢量水听器,并且直接从IPD中提取目标的角度和距离信息,无需进行复杂的信号处理。
该方法的主要步骤如下:1.通过单个矢量水听器接收水声信号,并对信号进行滤波和预处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ab t a t Th r cso f t r e i h a g e e a u t n b sn i g e v c o y r p o e i l w ,i s r c : e p e ii n o a g t p t n l v l a i y u i g s n l e t r h d o h n s o c o t c n te tm a e t e d s a c f t r e . I r e o s l e t i u s i n,a t r e a s v o a ia i n m e h d a ’ s i t h it n e o a g t n o d rt o v h s q e to a g tp s i e l c l to t o z c mb n n e t rh d o h n n c lr h d o h n s p o o e . Th e t r h d o h n c u r c u tc o i i g v c o y r p o e a d s a a y r p o e i r p s d e v c o y r p o e a q i a o s i e i t n i n s i t zm u h b a r p p r a h Th h e — o n e t a r a c u r i e a n n e st a d e tma e a i t y b rg a h a p o c . e t r e p i tv r i l r y a q ietmed l y a d y c a e t t ic n l n it n e si ma e p t h a g e a d d s a c .Th n l c tn o h a g ti c iv d Th t o a e n v rf d e o a i g f r t e t r e s a h e e . e me h d h s b e e ii e b o p t r s mu a i n,t e s s e o o a ia i n h s b e e p a d t s e n r a . Th e u t s o y c m u e i lt o h y t m f I c l to a e n s tu n e t d i e 1 z e r s l h ws t a h s s s e h s sm p e s r c u e a d h g o a ia i n p e i i n th s a wi e a p ia i n f r g o n h tt i y t m a i l t u t r n i h l c l t r cso .I a d p l t o e r u d z o c o i h il f u d r t r p s i e e p o a i n t c n l g . n t e f d o n e wa e a sv x l r t e h o o y e o Ke r s v c o y r p o e d r c i n e t to t ed l y e t y wo d : e t rh d o h n , ie t s i o ma i n, i ea s i t n, e e a ie r s o r l t n m ma i g n r l d c o sc r e a i o z o
Vo_ 3 No. 2 I 6. 1
De 2 I c, 01
火 力 与 指 挥 控 制
F r o to & Co i C nrl e mma dCo to n nrl
第3 6卷
第1 2期
21 0 1年 l 2月
文 章 编 号 :0 20 4 ( 0 1 1— 0 10 1 0— 60 2 1 )20 5 —3
器 和 声 压 水 听 器 的 三 元 阵 被 动 定 位 新 方 法 。利 用 矢 量水 听 器 获 得 的声 强 信 息 , 用 直 方 图 估 计 法 进 行 目标 方 位 估 计 } 用 三 采 利 元 垂 直 线 阵获 得 的 时延 信 息 , 行 目标 俯 仰 角 和 距 离 估 , 而 实 现 了对 目标 的定 位 。对 算 法 进 行 了仿 真 验 证 并 搭 建 定 位 系 进 从 统 进 行 了实 测 , 果 表 明该 系统 结 构 简单 , 位 精 度 较 高 , 水 下 被 动 探 测 领 域 具 有 广 泛 的 应 用 前 景 。 结 定 在 关键 词 : 量水听器 , 位估计 , 矢 方 时延 估 计 , 义 互 相 关 广
中 图分 类 号 : B 6 T 55 文 r t r Ta g tLo a ia i n Ba e n Ve t r Hy r p o e e wa e r e c lz to s d o c o d o h n
LI Zh— u U ik n,LI Zh n U o g,FU e z i Xu —h ,LUO — o g Ya s n
( o e eo lc o i E g n e ig, v l i . f E gn e n Wu a 3 0 3 C ia C l g f E et nc n ier l r n Na a v o n ier g, h n 4 0 3 , hn ) Un i
基 于 矢 量 水 昕 器 的 水 下 目标 定 位 系 统
刘 志坤 , 忠 , 学 志 , 刘 付 罗亚松
( 军 工 程 大 学 电子 工 程 学 院 , 汉 海 武 403) 3 0 3
摘
要 : 个 矢 量 水 听 器 测 量 目标 俯 仰 角精 度 不 高 , 不 能 对 目标 距 离 进 行 估 计 , 对 此 问 题 。 出 了 一 种结 合 矢量 水 听 单 且 针 提