6连杆机构优化设计
连杆机构的分析和设计

连杆机构的分析和设计连杆机构是一种常见的机械传动装置,具有结构简单、传动平稳等优点,被广泛应用于各个领域。
本文将对连杆机构的分析与设计进行详细介绍。
连杆机构由连杆和关节构成,其中关节是使连杆之间能够相对运动的连接部件。
连杆机构可分为四杆机构、双曲杆机构和单曲杆机构等多种类型。
其中,四杆机构最为常见,是由四根连杆组成的机构。
机构结构分析是指对机构的组成部件进行材料选择、尺寸设计等工作。
在选择材料时,需考虑连杆的抗拉强度、抗压强度等因素。
在尺寸设计中,需满足机构的强度要求,同时尽量减小机构的质量和体积。
此外,连杆机构还需考虑连杆的相互约束关系,以保证机构的稳定性。
运动分析是指对机构运动规律进行研究。
在分析连杆机构的运动规律时,首先需要确定机构中各个连杆的运动关系。
常用的分析方法包括位置分析和速度分析等。
位置分析是指通过几何方法,确定机构各杆件的位置关系,以及杆件随时间变化的位置。
速度分析是指通过运动学方法,确定机构各杆件的速度关系,以及杆件随时间变化的速度。
在连杆机构的设计中,除了满足基本的运动规律外,还需考虑一些实际问题。
比如,在机构设计中,需考虑连杆的制造精度、装配误差等因素,以保证机构的运动精度。
在机构的运动平稳性分析中,需考虑机构的平衡性,避免机构发生过大的振动和冲击。
此外,在连杆机构设计中,还需考虑力学中的静力学平衡条件,以确保机构中各部件受力平衡,避免发生失稳或破坏。
在连杆机构的设计中,还可以根据不同的需求进行优化设计。
比如,在满足机构基本要求的前提下,通过调整连杆的形状和尺寸等参数,以提高机构的运动性能。
此外,还可以通过使用特殊连杆形式,如曲柄滑块机构、摇杆机构等,实现特定的运动要求。
总之,连杆机构的分析与设计是一项复杂而重要的工作,需要综合考虑材料选择、尺寸设计、运动规律分析等多个因素。
通过合理的分析与设计,可以确保连杆机构的性能与稳定性,提高机构的使用寿命和效率,实现机构的优化设计。
液压挖掘机铲斗机构的优化设计

即 l13 = 288mm、l21 = 281mm、l24 = 201mm、l29 = 313mm、l15 = 926mm、ψ = 2183 ×180 /π = 162°。
3 结 论
由计算结果可以看出 ,液压挖掘机铲斗机构经过优化以后 ,可在满足各约束条件下 ,取得一个最优值 ,以 使挖掘力最大 ,挖掘轻松顺利 ,提高工作效率 。优化设计的方法比常规设计更能得出符合实际的结果 ,而且 , 采用计算机辅助设计与手工计算相比 ,设计效率大大提高 。
n +1
F (X)
∑ [M =k =1
(φk
)
- MZ
(φk )
]2
→M IN
n +1
式中 , ( n + 1)是在机构自变量 φ的变化范围内均匀取出的状态 。
其中负荷函数 M Z : 以 φ为自变量 ,分四段来书写负荷函数为 :
第一段 :φ =φ0 ~φ0 +Φm - Δφ
M Z (φ) = l3
中小型挖掘机通常以铲斗液压缸挖掘作为主要挖掘方式 ,希望在实际挖掘中 ,挖掘力足够 ,挖掘时能轻 松顺利 。但铲斗机构的设计和工作又都受到一些约束的限制 ,选择一个最佳的设计方案 ,显然会大大提高挖 掘质量和工作效率 ,本文采用复合函数法对铲斗机构进行优化设计 。
1 优化模型
6连杆机构优化设计
2000t,行程 1100mm 的多连杆机构。为满足用户使用要求和最小化生产厂家变更引起费用,此机 构必须满足下列条件: 驱动臂 R=250~280mm;支撑点变化范围 X=1100~1300,Y=150~350mm; 曲柄中心到下死点距离 2800~3150;公称压力 2400T,公称压力行程 30mm; 滑块拉伸行程为 400mm,拉伸行程内速度小于 21m/s,最大小于 23m/s,为保证冲压质量, 在拉伸行程内拉伸曲线要接近直线,如图 3 示; 连杆压力角小于 45 度; 摆杆与摇杆之间传动角大于 55 度; 连杆最大应力小于 60MPa。 对应的冲头的位移、速度、加速度曲线如图示:
1 机构性能设计
在机构设计中,用户最关心的整机性能设计,而目前机构运动分析的方法有图解法、解析法 和实测法等。图解法特点是形象直观、方法简单、但精度不高,且在对机构的一系列位置进行分 析时,需反复作图而显得繁琐,设计周期过于冗长。实测法以物理样机为基础,在设计多用于检 验和校核。解析法的特点是精度高、比较抽象,计算量大。随着电子计算机硬件资源和各种专业 软件的发展和普及而日益得到广泛应用。 其中代表的仿真软件 Recurdyn 等。 在机构详细设计阶段, 则利用有限元对具体的机构尺寸参数进行强度、刚度、稳定性校核,常用的校核工具有 Simulia 的 Abaqus 等软件,而进行网格划分使用 Abaqus CAE 等工具。
- 262 -
第六届中国 CAE 工程分析技术年会论文集
图 6:Isight 集成 Recurdyn、Abaqus 试验设计流程
粒子群算法(particle swarm optimization,PSO)由 Kennedy 和 Eberhart 在 1995 年提出,该算法 模拟鸟集群飞行觅食的行为,鸟之间通过集体的协作使群体达到最优目的,是一种基于 Swarm Intelligence 的优化方法。同遗传算法类似,也是一种基于群体叠代的,但并没有遗传算法用的交 叉以及变异,而是粒子在解空间追随最优的粒子进行搜索。PSO 的优势在于简单容易实现同时又 有深刻的智能背景,既适合科学研究,又特别适合工程应用,并且没有许多参数需要调整。目前, 已有的群智能理论和应用研究证明群智能方法是一种能够有效解决大多数优化问题的新方法,更 重要是,群智能潜在的并行性和分布式特点为处理大量的以数据库形式存在的数据提供了技术保 证。无论是从理论研究还是应用研究的角度分析,群智能理论及应用研究都是具有重要学术意义和 现实价值的。 粒子群算法(particle swarm optimization,PSO)搜索方向按照下式更新。
装载机反转六连杆机构的优化设计

中 图 分 类 号 : 1 .1 U4 55
引言
装 载机 主 要 用来 铲 、 、 、 散 装物 料 , 一 种 用途 十 装 卸 运 是
装 载 机 的 工 作 机 构
运 用 机 械 动 力 学 仿 真 软 件 ( AMS 建 立 了 某 装 载 机 反 转 六 连 杆 机 构 的 动 力 学 模 型 , 其 进 行 了 仿 真 研 究 , AD ) 对 发 现 在 装 载 机 铲 装 作 业 过 程 中 , 斗 的 最 大 转 动 角 度 达  ̄ 2 .。 经 过 A MS 化 设 计 后 , 斗 的 最 大 转 动 角 度 降 f f 。 从 铲 f 39 , J DA 优 铲  ̄ ] , 9
转 自缸
提 升过 程 中 , 斗有 一 定程 度 的转 动 。 了在 装载 作 业 中减 铲 为
少 物料 的撤 落 , 以下2 办 法 。 有 种 () 动 臂 提 升 过 程 中 , 驶 员 不 停 地 调 整 转 斗 油 缸 的 1在 驾 位置 . 持 铲 斗 的角度 不 变 : 保 () 过 优 化 设 计 的 方 法 使 反 转 六 连 杆 机 构 在 动 臂 举 2 通 升 过 程 中保 持 铲斗 的角 度 不 变 。 第 1 方 法容 易使 驾 驶 员产 生 疲 劳 , 此不 宜采 用 : 2 种 因 第 种 方 法 是 现 在 通 用 的 办 法 。 传 统 的 机 械 设 计 常 采 用 试 算 的
装载 机 的工 作 机构 主要 包 括 转 斗 油 缸 、 臂 、 臂 、 摇 动 铲
分 广 泛 的 工 程 机 械 ,轮 胎 式 装 载 机 由于 其 速 度 快 、 灵 活 机 斗 、 杆 和 动 臂 油 缸 6 部 件 , 为 六 连 杆 机 构 。 因 为 转 斗 连 个 称 又 动 、 率 高 而 被 广 泛 使 用 E2 某 型 装 载 机 在 装 载 物 料 过 程 油 缸 的 运 动 方 向 和 铲 斗 的 转 动 方 向 相 反 .所 以称 为 反 转 六 效 l] -。 中经 常 出现 物料 撤 落 的情况 , 重 影 响 了其 作 业效 率 。 严 经分 析后 认 为 ,物料 撤 落 的主 要原 因是 装载 机在 动 臂 连 杆 机 构 。 某 装 载 机 工 作 装 置 的 结 构 如 图 1 示 [。 所 3 ]
基于ADAMS的六连杆冲压机构的仿真优化设计
Jn 0 6 u e2 0
基于 A A D MS的 六 连 杆 冲 压 机 构 的 仿 真 优 化 设 计
宋梅利 , 元勋 , 范 祖 莉
( 京 理 工 大 学 机 械 丁程 学 院 , 苏 南 京 2 0 9 ) 南 江 10 4
摘
要: 为提 高机 构 的 工作 效 率和 获得 较好 的使 用性 能 , 对 六连 杆 冲压 机 构进 行 优 化 设 计 。 针
维普资讯
第3 0卷 第 3期
20 0 6年 6月
南
京理Biblioteka 工大学学
报
V0 . 0 No 3 13 .
J u n l f a j gU ies yo c n ea d T c n lg o r a o n i nv ri f i c n eh oo y N n t S e
通过 对 六连杆 冲压 机构 工作 原理 和 工作情 况 的分析 , 定设 计 变量 , 立 目标 函数 和 约 束条 件 , 确 建 提 出 了以该机 构在 工作段 最 小压 力 角为主要 设 计 目标 的 六连杆 参数 优化 设 计的数 学模 型 , 用 采
机械 系统 仿真软 件 A A D MS对该 机 构进 行 运 动仿 真 , 对 参数 进 行 了优 化 计 算 , 到 了机 械 效 并 得
收 稿 日期 :0 4— 8—2 20 0 9
修 回 日期 :0 6— 3—1 20 0 7
作 者 简 介 : 梅 利 ( 9 5一 ) 女 , 东 莱 阳 人 , 师 , 士 , 要 研 究 方 向 : 械 设 计 理 论 及 自动 化 , — a : 宋 17 , 山 讲 硕 主 机 E m i l
率较 高的 冲压机 构 。 关 键词 : 压机构 ; 冲 六连杆 仿真 ; 优化 设 计 中图分 类号 :H 12 T 2 文 献标识 码 : A 文章 编 号 :0 5— 8 0 20 )3— 2 5— 3 10 9 3 (0 6 0 08 0
平面六杆机构的运动分析

平面六杆机构的运动分析
1.确定机构的几何特性:首先,需要根据机构的构件和铰链的几何特
性确定机构的几何特性。
这包括确定构件的长度、铰链的位置和角度。
2.建立机构的运动方程:根据机构的几何特性,可以建立机构的运动
方程。
运动方程描述了机构各构件之间的运动关系,可以通过几何关系和
运动链法建立运动方程。
3.解决运动方程:通过求解运动方程,可以得到机构各构件的位置、
速度和加速度。
这可以通过数值方法或解析方法来完成。
4.分析机构的运动特性:根据机构的运动方程和解决的结果,可以分
析机构的运动特性。
这包括机构的平稳性、运动范围、速度和加速度的变
化等。
5.优化机构的设计:根据分析的结果,可以对机构的设计进行优化。
例如,可以调整构件的长度、角度和铰链的位置,以改善机构的运动性能。
总之,平面六杆机构的运动分析是研究和设计机械系统的重要步骤。
通过分析机构的运动特性,可以优化机构的设计,提高机械系统的性能和
效率。
因此,对平面六杆机构的运动分析有着重要的理论和实际意义。
织机六连杆打纬机构的优化设计与仿真

l o ; p i ld sg ; it a r t t p o ms o t ma e i n v r u lp o o y e
0 引— 口 :
用连 杆机 构来 取代 凸轮 机构 一直 是老机 改造和 简易无 梭织 机开发 中的重 要 课题 。连 杆式 打 纬 卜 仿 真 , 模块 化建 模思 想和模 糊控 制理 论相结 合 , 将 利 用 Mal / i l k的建 模仿 真工 具 进行 实 验 。与 t b Smui a n 传 统 P D控 制系 统相 比 , I 模糊 自适 应 P D控 制 可 以 I 通 过模糊 逻 辑控制 器 自适 应 整 定 K K , , K。参 数 ,
2 6— 2 . 9
r
f
× 0 5
o
o 1 .
o2 .
__ 0
2 0
0 1 .
02 .
£ /S
tS {
( P D 节 下 稳 定 a) I 调 运 行 时突 加 负载
( FL — D 节 下 稳 b) C PI 调 定运 行 时突 加 负载
图 4 突 加 负 载 时 的 仿 真 曲线
.
:
:
:
一
: : :
I: : I: f ; : : 8
:
一
:
:
、一 ,
: f
● ● 。
: :
●
× 0 2
0 .5
:
} ,
.
:
:
’
: :
t o b x Th it a r t t p o lo . e v r u l p o o y e mo e f 6 一 l k d lo i n
连杆出件机构运动优化设计

! . "!!#)), ! 3 "!.#)), ! ( ".0()), ! 4 "(()), !0 " .2#)), %".’8。 初始步长为 #7##! , 收敛精度为 !# 1.#, 采用约束
坐标轮换法 , 分别进行拨料爪位置及运动优化。对
[ 3]
##
锻压机械
!"#$$#
锥面弹性衬套联接方式在锻压机床中的应用
$#,$&#
摘要 关键词 通辽市 内蒙古民族大学 李长河 介绍了一种带有弹性锥面紧固衬套新型联接方法的基本结构和工作原理, 以及这种联接方法在 锥面弹性衬套 联接 摩擦力 锻压机床
锻压机床中的实际应用。 中图分类号
:;!%!(+
"
引言 机械传动中传动轴与轮毂孔之间传统的联接方
! # % &
式是键联接, 但这种方法极易疲劳失效, 经常出现键 被压溃、 折断、 键槽变形等问题, 给维修、 生产与管理 造成一定的影响。锥面弹性衬套联接方法则很好地 解决了这一问题。 这种联接方法广泛应用于带轮、 链 轮、 齿轮、 蜗轮和半联轴器等传动件, 搅拌机、 蜗轮机 和送风机等机械的叶轮,以及滚筒等其他具有旋转 轴的机械零部件与传动轴的联接上。锥面弹性衬套 可实现规格化、系列化和生产供应的专业化、商品 化, 具有广阔的发展前景。
!
目标函数的建立 冲压加工中,为防止送料干涉,上模上行时要
求: 拨料 !当上模底面在距离下模上表面 #%&& 时, 爪应在模具外轮廓的左外边;"当上模底面在距离 下模上表面 #’&& 时,拨料杆应在模具外轮廓的左 外边( 其中, 预留有 (&& 的滑块安全行程) 。经分析 后可知, 当出件机构满足条件"时, 条件! 可同样得 到满足。由此, 建立第一个防干涉目标函数:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6 连杆机构优化设计
李保国 曾利群 (赛特达(北京)科技有限公司,北京,100124)
摘
要: 使用 Recurdyn 软件建立 6 连杆机构性能分析模型,利用计算得到的各交接点的反力结合 Abaqus 软件进
行连杆强度校核,评估机构性能。利用 Isight 软件集成 Recurdyn 软件和 Abaqus 软件形成自动化性能分析、强度 校核和优化流程,以优化算法、回归分析等方法进行数据挖掘,优化该机构性能,达到提高产品性能、缩短设计 周期的目的。 关键词:多刚体动力学;有限元;优化设计;过程集成
图 12 支撑点位置与行程之间关系图
3 结论
上述工作是进行机构性能设计、部件详细设计的一个开始,后继工作有机构性能优化、部件 有限元分析、刚柔混合动力学计算等,以及考虑各种不确定性的稳健设计(Robust design)等, 在产生大量数据的基础上,应用数据回归分析,形成企业设计知识,另一方面要实现优化数据与 Matrix One 等企业信息化平台数据共享,方便其他设计人员查询优化结构和浏览设计、分析、优 化流程。通过上文的分析,可以得出下午的结论: (1)利用 Recurdyn、Abaqus 等仿真工具软件可以有效的提供企业产品设计水平,全面检验产 品各项性能。但是,如果没有过程集成、自动化技术,在进行复杂系统开发时,各个模块、部门 之间的数据交换、设计标准定量化形成过程将成为决定企业应用 FEM、多刚体等工具软件水平高 低的主要影响因素;优化理论和仿真工具的结合必将提升企业仿真水平。 (2)基于流程集成的方法可将 Abaqus 等有限元软件与试验设计等结构化产品设计方法结合, 将是企业能够产品虚拟样机阶段考虑各种因素的影响、产品的加工、使用过程中的不确定性,使 企业的 CAE 仿真能力有设计校核提升到稳健设计(Robust design)水平。同时,流程集成(SMP) 能够有效的实现企业跨部门、系统协作,成几何量级的提高企业设计效率; (3)基于流程集成方法的将能有效的提高企业各种资源,比如 CAD、CAE 软件、计算机硬 件等的使用效率,同时和企业 Matrix One 等信息平台的连接,将使企业各个层次设计人员能够共 享仿真结果,在不增加企业软硬件资源的前提下,提高企业的投资回报率。
2000t,行程 1100mm 的多连杆机构。为满足用户使用要求和最小化生产厂家变更引起费用,此机 构必须满足下列条件: 驱动臂 R=250~280mm;支撑点变化范围 X=1100~1300,Y=150~350mm; 曲柄中心到下死点距离 2800~3150;公称压力 2400T,公称压力行程 30mm; 滑块拉伸行程为 400mm,拉伸行程内速度小于 21m/s,最大小于 23m/s,为保证冲压质量, 在拉伸行程内拉伸曲线要接近直线,如图 3 示; 连杆压力角小于 45 度; 摆杆与摇杆之间传动角大于 55 度; 连杆最大应力小于 60MPa。 对应的冲头的位移、速度、加速度曲线如图示:
2 机构设计过程
2.1 传统设计过程
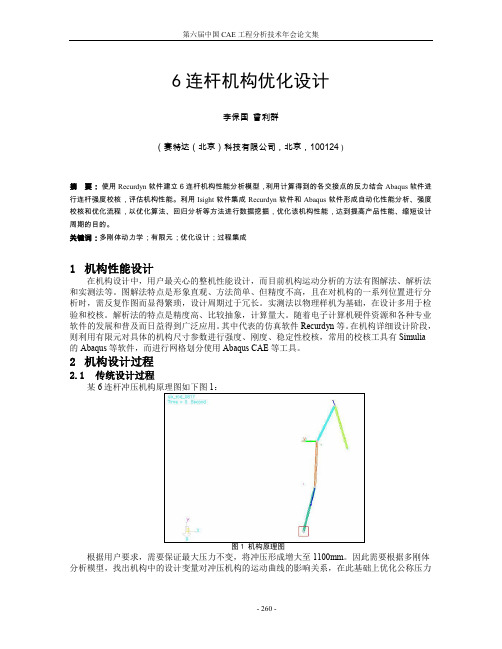
某 6 连杆冲压机构原理图如下图 1:
图 1 机构原理图
根据用户要求,需要保证最大压力不变,将冲压形成增大至 1100mm。因此需要根据多刚体 分析模型,找出机构中的设计变量对冲压机构的运动曲线的影响关系,在此基础上优化公称压力
- 260 -
第六届中国 CAE 工程分析技术年会论文集
2.2 优化设计过程
该机构性能设计、强度校核的工程问题在 Isight 中形成的优化问题定义如下:
f = (R, X, Y) = VStd + A Std g(R , X , Y) = Vmean ≤23 21 ≤g(R , X , Y) = Vmean Stroke = 1100mm Agnle trans ≤ 45 55 ≤ Angle surport Strss ≤60MPa 250 ≤R ≤280 1100 ≤ X ≤1300 150 ≤ Y ≤350
第六届中国 CAE 工程分析技术年会论文集
作者简历: 李保国,男,北京理工大学车辆工程系,国家计算机等级 3 级 B,学习过数据库、C++、数据结构、操作系统等专 业计算机课程。
- 266 -
参考文献: [1] 曹泗秋 杨巍 机械原理 湖北科学技术出版社 [2] 徐俊 主编 机械设计大典 江西科学技术出版社 [3] Simulia Abaqus help [4] Simulia Isight 4.5 help [5] FunctionBay Recurdyn 7.3 help
- 265 -
此次设计中,利用优化设计方法,通过 1000 次计算,使的优化目标(工作段速度方差与加速 度方差之和)下降 20%,在形成方面少量违反设计约束,通过优化设计发现该方案设计中,起作 用约束(或者称作敏感约束)为机构冲压行程。为进步挖掘设计变量与优化目标之间的关系,利 用优化过程得到的数据,利用 RBF 神经网络模型建立支撑点与行程之间的数据回归模型如下图。
第六届中国 CAE 工程分析技术年会论 Nhomakorabea集在 Isight 优化过程中,设计变量、设计目标的寻优过程中变化情况,为判定优化问题是否收 敛提供依据。。利用散点图可以监控在优化过程中,设计方案在设计空间中的分布情况,以此为 依据直观的判定优化方案是否为全局最优解。下图支撑点 x, y 在允许范围内的分布情况。
1 机构性能设计
在机构设计中,用户最关心的整机性能设计,而目前机构运动分析的方法有图解法、解析法 和实测法等。图解法特点是形象直观、方法简单、但精度不高,且在对机构的一系列位置进行分 析时,需反复作图而显得繁琐,设计周期过于冗长。实测法以物理样机为基础,在设计多用于检 验和校核。解析法的特点是精度高、比较抽象,计算量大。随着电子计算机硬件资源和各种专业 软件的发展和普及而日益得到广泛应用。 其中代表的仿真软件 Recurdyn 等。 在机构详细设计阶段, 则利用有限元对具体的机构尺寸参数进行强度、刚度、稳定性校核,常用的校核工具有 Simulia 的 Abaqus 等软件,而进行网格划分使用 Abaqus CAE 等工具。
图 2 冲头位移曲线
图 3 冲头速度曲线
图 4 冲头加速度曲线
- 261 -
第六届中国 CAE 工程分析技术年会论文集
在完成机构性能分析的同时,利用 Recurdyn 软件计算出的压杆两端的最大力,加载在有限元 模型中,计算初杆件薄弱区域的最大应力。压杆有限元模型在 Abaqus CAE 软件中生成,整个模 型使用 10 节点二次体单元,利用 Rebar 将 Recurdyn 计算的力分配到压杆两端,使用 Pre 中的惯 性释放进行有限元强度校核计算,检验连杆是否满足设计的强度要求。 依照传统设计方法,每次做完上图冲头位移、速度、加速度曲线,按照上述工作要求,逐条 对应分析是否满足条件。整个过程依靠手动完成,在客户日益缩短的交货周期和日益提供的产品 性能要求下,手工的改进和提高模式难于满足现在市场环境的要求;同时,对于要求在拉伸行程 速度满足一定条件,设计人员凭经验难于形成量化的评价指标,即使设计人员编写一段程序对该 段拉伸曲线进行处理,对于这种高度非线性问题,没有可靠、高效的数学方法,亦不能同时满足 上述约束条件。第三、从企业角度,如果在设计中过分的强调个人经验,则难于在设计部门推广。 第四、在机器的加工过程和客户使用磨损后,冲压机构性能的波动更是依靠校核无法完成的设计 工作。 因此,为了解决上述问题,在进行该机构性能、杆件强度设计时,引入 Isight 软件,集成 Recurdyn、Abaqus 软件形成完整的机构性能设计、强度校核多学科工作流程,优化算法、回归分 析、质量工程等结构化设计方法驱动整个工作流程,进行冲压机构性能设计和连杆强度校核,达 到提高设计效率、 质量, 缩短设计周期的目的; 同时, 利用在优化过程中产生的数据可以通过 Isight 与 Matirxone 、TeamCenter 等 PLM 的数据接口可以直接写入企业数据库中,形成企业设计知识, 当遇到相同设计时,能够让广大设计人员方便查询、利用。
图 9:支撑点位置 x、y 和驱动臂长度历史曲线图
在冲压工作段曲线的加速度方差、最大压力角、6 连杆机构的冲程在优化过程中的历史曲线 图。
图 10 优化过程中工作段加速度方差、最大压力角、行程历史曲线图
图 11 优化过程中目标、罚函数之和历史曲线图
- 264 -
第六届中国 CAE 工程分析技术年会论文集
利用冲压机构在拉伸段工作曲线的速度、加速度的方差加权后形成设计目标,可以将手动设 计模糊的设计准则形成准确的数学表述,以此形成定量的衡量标准,实现性能设计由定性分析向 定量分析的提升。 2.2.1 Isgiht 定义优化设计过程 在 Isight 环境下集成 Recurdyn、Abaqus 软件设计流程如下图 6,以离子群优化算法驱动该工 作流程,进行方案寻优。
i i p i xk pkg xk v wv c1rand ( ) c2 rand ( ) t t i p i xk 其中 c1rand t 代表离子“自身经验”,其权重 c1 在 Isight 软件中对应选项为:Particle i k 1 i k
- 262 -
第六届中国 CAE 工程分析技术年会论文集
图 6:Isight 集成 Recurdyn、Abaqus 试验设计流程
粒子群算法(particle swarm optimization,PSO)由 Kennedy 和 Eberhart 在 1995 年提出,该算法 模拟鸟集群飞行觅食的行为,鸟之间通过集体的协作使群体达到最优目的,是一种基于 Swarm Intelligence 的优化方法。同遗传算法类似,也是一种基于群体叠代的,但并没有遗传算法用的交 叉以及变异,而是粒子在解空间追随最优的粒子进行搜索。PSO 的优势在于简单容易实现同时又 有深刻的智能背景,既适合科学研究,又特别适合工程应用,并且没有许多参数需要调整。目前, 已有的群智能理论和应用研究证明群智能方法是一种能够有效解决大多数优化问题的新方法,更 重要是,群智能潜在的并行性和分布式特点为处理大量的以数据库形式存在的数据提供了技术保 证。无论是从理论研究还是应用研究的角度分析,群智能理论及应用研究都是具有重要学术意义和 现实价值的。 粒子群算法(particle swarm optimization,PSO)搜索方向按照下式更新。