元胞自动机理论基础
元胞自动机简介

元胞⾃动机简介摘要:1. 阐述了元胞⾃动机的发展历程、结构、特征及基本理论与⽅珐;2. 指出元胞⾃动机理论的优势与不⾜,1引⾔复杂科学1. 20世纪80年代,以美国圣塔菲(SantaFe)学派为⾸提出了复杂科学,⼀经提出,在世界范围内引起了⼴泛的关注。
⽬前,关于复杂性和复杂系统的科学研究占据着越来越重要的位置,以⾄于被有些科学家誉为“21世纪的科学”。
2. 1985年,耗散结构理论的创始⼈,诺贝尔化学奖获得者I.Prigogine提出了社会经济复杂系统中的⾃组织问题。
1988年,诺贝尔物理学奖获得者P.Anderson和诺贝尔经济学奖获得者K.J.Arow通过组织专题讨论会,提出了经济管理可以看作是⼀个演化着的复杂系统。
此后,随着研究的不断深⼊,复杂系统中所涉及的⾮线性、⾮平衡、突变、混沌、分形、⾃组织等理论在经济管理领域有了越来越⼴泛的应⽤。
元胞⾃动机1. 在复杂性和复杂系统的研究过程中,国内外学者提出了许多探索复杂性的⽅法及⼯具,其中,元胞⾃动机(cellularautomaton,CA)以其组成单元的简单规则性,单元之间作⽤的局部性和信息处理的⾼度并⾏性,并表现出复杂的全局性等特点⽽备受关注,成为探索复杂系统的⼀种有效⼯具。
2元胞⾃动机的基本理论及⽅法2.1元胞⾃动机的发展1. 20世纪50年代初,现代计算机的创始⼈冯·诺依曼(vonNeuman)为模拟⽣物发育中细胞的⾃我复制⽽提出了元胞⾃动机的雏形。
但在当时这项⼯作并未引起⼴泛的关注与重视。
2. 1970年,剑桥⼤学的J.H.Conway设计了⼀种计算机游戏———“⽣命的游戏”。
它是具有产⽣动态图案和动态结构能⼒的元胞⾃动机模型,吸引了众多科学家的兴趣,推动了元胞⾃动机研究的迅速发展。
3. 之后,S.Wolfram对初等元胞⾃动机的256种规则产⽣的所有模型进⾏了详细⽽深⼊的研究。
他还⽤熵来描述其演化⾏为,把元胞⾃动机分为:平稳型、周期型、混沌型、复杂型四类。
元胞自动机简介
元胞自动机基础元胞自动机(cellular automaton, CA)是最近一个比较热门的研究课题,其是物理、数学、计算机和生物等学科的交叉产物。
在计算机领域中,CA在人工智能、计算复杂性分析以及加密等多个领域中有着较大的用途。
特别是在大约十年前,密码学家H. Gutowitz根据CA的基本原理,提出了分块加密算法CA-1.1,使得CA在密码学中真正的迈出了第一步,也使得越来越多的密码学家开始了对CA的研究。
最近,我也开始对这个方面产生了浓厚的兴趣,并开始了一些学习,就先来简单的说说什么是CA吧!简单的说,元胞自动机是一个空间、时间和状态上都离散的动态系统。
构成CA的基本单位成为元胞(cellular),规则的分布在元胞空间(spatial lattice)的格点上,且各自的状态随着时间按照一定的局部规则变化。
也就是说,元胞的状态只能从一个有限的状态集中取值,每个时刻元胞的状态仅与其自身和邻居在上一时刻的状态有关,并且,所有的元胞在每个时刻均是同时更新的。
以上即是对CA的一个定性的描述,下面给出一个基于集合论的定量描述(L. Hurd等):设d为CA空间的维数,k代表元胞的状态,集合S表示CA的整体状态,r表示元胞的邻居半径。
为了简单起见,我们在d=1,即一维空间上对CA进行讨论。
CA的动态性可以由一个全局函数F: St→St+1决定,并且,每个元胞的状态可以由一个局部函数f:kt→kt+1决定。
由于多维空间的CA具有很强的复杂性,故目前对CA的研究主要集中在一维和二维空间。
就一维空间而言,CA的结构显然只有可能是线性结构。
在二维空间,CA的结构可能有三角、四边或多边等构成方式。
显然,结构上的差异会对其在计算机表示及其他部分特性上带来一定的差异。
而CA 的邻居结构也通常包括Von. Neumann、Moore、扩展Moore和Margolus等多种形态,不同的邻居结构带来的特性和复杂度也不尽相同。
元胞自动机的产生

元胞自动机的产生元胞自动机(CA)的概念最早在20世纪50年代由冯•诺依曼提出,主要用于模拟生命系统的自复制功能,而其真正得到广泛关注则是在Conway于1970年提出生命游戏之后,随后CA 被广泛用于各个领域。
一方面元胞自动机的演化行为十分丰富,理论上可以模拟任何复杂的行为,另一方面元胞自动机模型足够简单,方便对复杂系统的本质特征进行研究。
元胞自动机(CA)具有强大的空间模拟能力,这类简单的模型够能十分方便地模拟和预测复杂的现象或动态演化过程中的吸引力、自组织和混沌现象。
因此目前CA被广泛应用于模拟各种物理系统和自然现象,如流体流动、星系形成、雪崩、交通流模拟、并行计算及地震等。
CA的核心是如何定义局部规则,用CA来模拟一个物理过程的优点在于省去了用微分方程作为过渡,而直接通过制定转换规则来模拟非线性物理现象。
在这些实际应用中,CA模型通过简单的微观局部规则揭示了自然发生的宏观行为,是目前研究时空离散的理想物理模型,在研究复杂系统方面被认为是一种最有效的工具之一。
元胞自动机起源于20世纪40年代,“现代计算机之父” 冯.诺伊曼设计可自我复制的自动机时,参照了生物现象的自繁殖原理,提出了元胞自动机的概念和模型。
它是一时间和空间都离散的动力系统,散步在规则格网中的每一元胞取有限的离散状态,遵循同样的作用规则,依据确定的局部规则同步更新,大量元胞通过简单的相互作用而构成动态系统的演化,不同于一般的动力学模型,元胞自动机不是由严格定义的物理方程定义的物理方程或函数确定,而是用一系列模型构造的规则构成。
凡是满足这些规则的模型都可以算作是元胞自动机模型20世纪70年代,Con way编制的“生命游戏”是最著名的元胞自动机模型,显示了元胞自动机在模拟复杂性系统的无穷潜力。
引起了物理、数学、生物、计算机、地理等领域专家的兴趣,“生命游戏”被认为是元胞自动机研究的真正开始。
20世纪80年代是元胞自动机理论的大发展时期。
元胞自动机原理 最简单讲解

元胞自动机原理最简单讲解元胞自动机(Cellular Automaton,CA)是一种数学模型,由一组简单的规则组成,模拟了由离散的元胞(cells)组成的空间,并根据相邻元胞的状态进行演化和互动的过程。
元胞自动机的主要理论基础是斯蒂芬·沃尔夫勒姆(Stephen Wolfram)于1983年提出的。
它在多学科领域中得到了广泛的应用,包括复杂系统研究、计算机科学、生物学、物理学等。
元胞自动机的基本结构由网格(grid of cells)和一组规则(set of rules)组成。
网格是由一些离散的元胞(通常是正方形或六边形)组成的空间,每个元胞都具有一个状态(state)。
元胞的状态可以是离散的,例如0或1,也可以是连续的,代表某种物理量的值。
规则定义了元胞之间的相互作用方式,它描述了当周围元胞的状态发生变化时,当前元胞的状态如何更新。
元胞自动机的演化过程可以分为离散和连续两种。
在离散的情况下,每个元胞的状态在每个时刻都是离散的,不能取连续的值。
每个时刻,根据规则,元胞的状态会根据其周围元胞的状态进行更新。
更新可以是同步的,即所有元胞同时更新,也可以是异步的,即元胞按一定的顺序依次更新。
在连续的情况下,元胞的状态可以是连续的,更新过程是基于微分方程的。
元胞自动机按照规则的类型可以分为确定性(Deterministic)和随机(Stochastic)两种。
确定性的元胞自动机意味着每个元胞的状态更新是根据一条特定的规则进行的,与其他元胞的状态无关。
而随机的元胞自动机则加入了一定的随机性,元胞的状态更新可能依赖于随机的概率。
元胞自动机的一个典型应用是康威生命游戏(Conway's Game of Life)。
康威生命游戏中,每个元胞的状态只能是“存活”或“死亡”,更新规则是基于元胞周围8个邻居的状态。
根据不同的初始状态和规则设定,康威生命游戏展示了丰富多样的生命演化形态,包括周期性的振荡、稳定的构造和复杂的混沌状态。
元胞自动机模型

元胞行为
局部变化引起全局变化
*可以简单认为元胞自动机在运动上 类似于波.
*无胞的状态变化依赖于自身状态和 邻居的状态
元胞自动机的规则
某元胞下时刻的状态只决定于邻居的状 态以及自身的初始状态.
元胞行为
元胞网格
元胞行为
元胞邻居
经典元胞
生命游戏
生命游戏 (Came of Life)是J. H. Conway 在2世纪6年代末设计的一种单人玩的计算机 游戏(Garclner,M.,97、97)。他与现代的 围棋游戏在某些特征上略有相似:围棋中有 黑白两种棋子。生命游戏中的元胞有{"生"," 死"}两个状态 {,};围棋的棋盘是规则划分的 网格,黑白两子在空间的分布决定双方的死 活,而生命游戏也是规则划分的网格(元胞似 国际象棋分布在网格内。而不象围棋的棋子 分布在格网交叉点上)。根据元胞的局部空间 构形来决定生死。只不过规则更为简单。
程序实现
典型元胞程序精讲
交通流
谢谢!
生命游戏的构成及规则: *元胞分布在规则划分的网格上; *元胞具有,两种状态,代表“死”,l代表“生”; *元胞以相邻的8个元胞为邻居。即Moore邻居形式; *一个元胞的生死由其在该时刻本身的生死状态和周 围八个邻居的状态 (确切讲是状态的和)决定: 在当前时刻,如果一个元胞状态为“生”,且八 个相邻元胞中有两个或三个的状态为“生”,则在下-时刻该元胞继续保持为“生”,否则“死”去; 在当前时刻。如果一个元胞状态为"死"。且八个 相邻元胞中正好有三个为"生"。则该元胞在下一时刻 " 复活"。否则保持为"死"。
基于元胞自动机的企业生产过程的研究
层 一员工执行系统的元胞 自动机模 型。通过对安全生产 的个 人 因素和 环境 因素在 不 同状 态下 的模拟 和分析 , 为员工遵 守 认 规章规程 的程度是影响企业安全 生产 的关键 因素之 一; 并在 此基 础上 , 建议企 业多关注 于如何保证政 策法规被 规 范执 行, 以
缩小 实际操作 与规则规程之 间的差距。这 为企 业安全生产的研究提供 了一种新的思路 。 关键词 元胞 自动机 安全生产 规章规程
s( + ) , s… … …, …, … 1 j ) jt 1 = (j , s j ,+ 。 s
3期
罗丽珍 , : 等 基于元胞 自动机 的企业生产过程 的研究
71 0
是第 J 元胞 的状 态 是定 义 在元 胞 空 间 上 个 的演 化 规则 映射 规则 , 上述 函数 表示 一个 元胞 在 t +
@ 2 1 SiT c nr. 0 2 c. ehE gg
基 于 元 胞 自动 机 的企 业 生 产过 程 的研 究
罗 丽珍 吴瑞 明
( 上海交通大学安泰经济与管理学 院, 上海 20 5 ) 00 2
摘
要 为减少和预防企业生产 中意外事 故的发生 , 元胞 自动机理论应用于企业 生产 过程 的研 究, 将 建立 了某企 业生产 中基
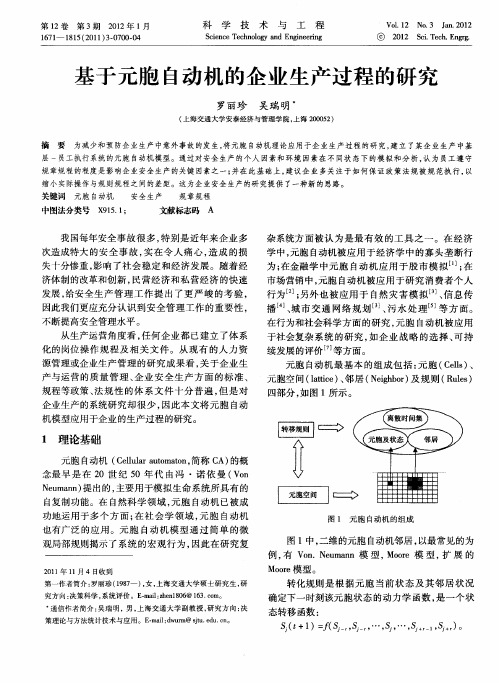
图 1 元胞 自动机 的组成
也 有广泛 的应 用 。元 胞 自动 机 模 型 通 过 简单 的微 观局部规 则揭示 了系 统 的宏 观 行 为 , 因此 在 研 究 复
21 0 1年 1 4 日收 到 1月
图 1中 , 二维 的元胞 自动 机邻居 , 以最常见 的 为 例 , V n N u an模 型 , oe模 型 , 展 的 有 o . em n Mor 扩 Mor模 型 。 oe 转化 规则 是 根 据 元 胞 当前 状 态 及 其 邻 居 状 况 确 定下 一时刻 该元 胞 状态 的动 力学 函数 , 一 个 状 是 态 转移 函数 :
元胞自动机(周吕文)

周吕文
中国科学院力学研究所
元胞自动机简介及其在数学模型中的应用
元胞自动机简介 元胞自动机理论 实例与实现 补充和总结
元胞构成 行为和规则
邻居(Neighborhood)
VonNeumann邻居
Moore邻居
扩展Moore邻居
周吕文
中国科学院力学研究所
元胞自动机简介及其在数学模型中的应用
元胞自动机简介 元胞自动机理论 实例与实现 补充和总结
3
4
Figure 12.3. A glider 元 gliding. 胞自动机简介
元胞自动机理论 实例与实现 补充和总结
元胞构成 行为和规则
元胞(Cell)
元胞是元胞自动机基本单元: 每 一个 元 胞 都 有 记 忆 贮 存 状 态的功能, 或者可以说元胞就 是一种状态. 最简单的情况下, 元胞只有两 种 可 能 状 态; 较 复 杂 情 况 下, 元胞具有多种状态. 系统中所有元胞的状态都按 照 元 胞 自 动 机 的 动力 规 则 不 断更新.
周吕文 中国科学院力学研究所 元胞自动机简介及其在数学模型中的应用
元胞自动机简介 元胞自动机理论 实例与实现 补充和总结
经典实例 数模中的应用
森林火灾的程序实现
若A矩 阵 有n行n列, 则 矩 阵A的四个邻居分别为 上 : A([n, 1:n-1], :)
01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 06 17 18 19 20 21 22 23 24 25
01 02 03 04 05
06 07 08 09 10
11 12 13 14 15
06 17 18 19 20
21 22 23 24 25
元胞自动机模型

元胞行为
局部变化引起全局变化
*可以简单认为元胞自动机在运动上 类似于波.
*无胞的状态变化依赖于自身状态和 邻居的状态
元胞自动机的规则 某元胞下时刻的状态只决定于邻居的状 态以及自身的初始状态.
元胞行为
元胞网格
元胞行为
元胞邻居
经典元胞
生命游戏
生命游戏 (Came of Life)是J. H. Conway 在2世纪6年代末设计的一种单人玩的计算 机游戏(Garclner,M.,97、97)。他与现 代的围棋游戏在某些特征上略有相似:围 棋中有黑白两种棋子。生命游戏中的元胞 有{"生","死"}两个状态 {,};围棋的棋盘是 规则划分的网格,黑白两子在空间的分布 决定双方的死活,而生命游戏也是规则划 分的网格(元胞似国际象棋分布在网格内。 而不象围棋的棋子分布在格网交叉点上)。 根据元胞的局部空间构形来决定生死。只 不过规则更为简单。
规则:
根据元胞当前状态及其邻居状况确
定下一时刻该元胞状态的动力学函 数,简单讲,就是一个状态转移函 t 数。 f : S it 1 f S it , S N
根据上面对元胞自动机的组成分析,我 们可以更加深入地理解元胞自动机的概 念。 可以将元胞自动机概括为一个用数 学符号来表示的四元组。 A Ld , S , N , f A:代表一个元胞自动机系统;Ld:代表 元胞空间;d:为空间维数;S:是元胞 有限的离散的状态集合;N:表示邻域 内所有元胞的组合(包括中心元胞在 内);f:是局部转换函数,也就是规则。
什么是元胞(CA)自动机
元胞自动机(Cellular Automata,简称CA) 实质上是定义在一个由具有离散、有限状态 的元胞组成的元胞空间上,并按照一定的局 部规则,在离散的时间维度上演化的动力学 系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
元胞自动机理论基础Chapter1元胞自动机(Cellular Automata,简称CA,也有人译为细胞自动机、点格自动机、分子自动机或单元自动机)。
是一时间和空间都离散的动力系统。
散布在规则格网 (Lattice Grid)中的每一元胞(Cell)取有限的离散状态,遵循同样的作用规则,依据确定的局部规则作同步更新。
大量元胞通过简单的相互作用而构成动态系统的演化。
不同于一般的动力学模型,元胞自动机不是由严格定义的物理方程或函数确定,而是用一系列模型构造的规则构成。
凡是满足这些规则的模型都可以算作是元胞自动机模型。
因此,元胞自动机是一类模型的总称,或者说是一个方法框架。
其特点是时间、空间、状态都离散,每个变量只取有限多个状态,且其状态改变的规则在时间和空间上都是局部的。
1. 自动机自动机(Automaton)通常指不需要人们逐步进行操作指导的设备(夏培肃,1984)。
例如,全自动洗衣机可按照预先安排好的操作步骤作自动地运行;现代计算机能自动地响应人工编制的各种编码指令。
完成各种复杂的分析与计算;机器人则将自动控制系统和人工智能结合,实现类人的一系列活动。
另一方面,自动机也可被看作为一种离散数字动态系统的数学模型。
例如,英国数学家A.M.Turing于1936年提出的图灵机就是一个描述计算过程的数学模型(TuringA M.,1936)。
它是由一个有限控制器、一条无限长存储带和一个读写头构成的抽象的机器,并可执行如下操作:·读写头在存储带上向左移动一格;·读写头在存储带上向右移动一格;·在存储的某一格内写下或清除一符号;·条件转移。
图灵机在理论上能模拟现代数字计算机的一切运算,可视为现代数字计算机的数学模型。
实际上,一切"可计算"函数都等价于图灵机可计算函数,而图灵机可计算函数类又等价于一般递归函数类。
根据存储带是否有限,可将自动机划分为有限带自动机(Finite Automaton)和无限带自动机(Infinite Automaton)。
由于图灵机有无限长的存储带,所以为一种无限带自动机。
有限带自动机常用作数字电路的数学模型,也用来描述神经系统和算法;而无限带自动机主要用来描述算法,也用来描述繁殖过程 (如细胞型自动机和网络型自动机)。
有限自动机是一种控制状态有限、符号集有限的自动机,是一种离散输入输出系统的数学模型。
可将有限自动机设想成由一条划分为许多方格的输入带和一个控制器组成的机器:在输入带的每一个小格中可以容纳一个符号,这些符号取自一个有限符号集S-控制器具有有限个可能状态(构成集合Q)。
并在每一时刻仅处于其中的一个状态q;控制器有一个读入头,可以从输入带中读入符号;时间是离散的,初始时控制器处在状态;控制器的功能是根据其当前状态g和读入头从输入带上得到的符号a,来确定控制器的下一时刻的状态实现从状态q到状态q',实现从状态q到状态铲q'的转移,并将读入头右移一格。
控制器另一功能是识别终止状态(它们构成Q的一个子集F),也可将该识别功能视为有限自动机的输出。
从数学上来定义,有限自动机是一个五元组:FA=(Q,S,δ,q0,F)其中,Q是控制器的有限状态集、S是输入符号约有限集、δ是控制状态转移规律的Q×S到Q的映射(可用状态转移图或状态转移表表示),q0是初始状态、F是终止状态集。
若δ是单值映射,则称M为确定性有限自动机;若δ是多值映射,则称M为非确定性有限自动机。
Chapter2在元胞自动机是由空间上各项同性的一系列元胞所组成,是在有限元胞自动机基础上发展起来的,用于模拟和分析几何空间内的各种现象。
2.2.1 典型的元胞自动机在元胞自动机的发展过程中,科学家们构造了各种各样的元胞自动机模型。
其中,以下几个典型模型对元胞自动机的理论方法的研究起到了极大的推动作用,因此,它们又被认为是元胞自动机发展历程中的几个里程碑。
l. S. Wolfram和初等元胞自动机初等元胞自动机(Elementary Cellular Automata,简称ECA)是状态集S只有两个元素{s1,s2},即状态个数k=2,邻居半径r=l的一维元胞自动机(谢惠民,1994、李才伟,1997、Wolfram,S,1986)。
它几乎是最简单的元胞自动机模型。
由于在S中具体采用什么符号并不重要,它可取 {0,1},{-l,1},{静止,运动},{黑,白},{生,死}等等,这里重要的是S所含的符号个数,通常我们将其记为 {0,1}。
此时,邻居集N的个数2r=2,局部映射f:S3→S可记为:其中变量有三个,每个变量取两个状态值,那么就有2×2×2=8种组合,只要给出在这八个自变量组合上的值,f就完全确定了。
例如以下映射便是其中的一个规则:通常这种规则也可表示为以下图形方式 (黑色方块代表l,白色方块代表0):这样,对于任何一个一维的0,1序列,应用以上规则,可以产生下一时刻的相应的序列。
以下序列就是应用以上规则产生的:t: 010111110101011100010t+1:1010001010101010001以上八种组合分别对应0或1,因而这样的组合共有28=256种,即初等元胞自动机只可能有256种不同规则。
S. Wolfram定义由上述八种构形产生的八个结果组成一个二进制(注意高低位顺序),如上可得01001100,然后计算它的十进制值R:R在[0,255]内,S. Wolfram定义R为初等元胞自动机的标号,则上面的元胞自动机模型就是76号初等元胞自动机 (谢惠民,1994;李才伟,1997)。
S. Wolfram对这256种模型一一进行了详细而深入的研究。
研究表明,尽管初等元胞自动机是如此简单,但它们表现出各种各样的高度复杂的空间形态。
经过一定时间,有些元胞自动机生成一种稳定状态,或静止,或产生周期性结构,那么,有些产生自组织、自相似的分形结构。
S. Wolham(1983)借用分形理论计算了它们的维数约为1.59或1.69(Wolfram,S.,1983)。
但256种元胞自动机中没有一种属于S. Wolfram元胞自动机动力学分类得第四种,所谓复杂型。
S. Wolfram对一维元胞自动机,尤其是初等元胞自动机的深入研究奠定了元胞自动机理论的基石。
对元胞自动机的理论研究,以及后来的人工生命研究和近来兴起的复杂性科学 (Science of Complexity)研究作出了卓越的贡献。
2. J. Conway和 "生命游戏"生命游戏 (Came of Life)是J. H. Conway在20世纪60年代末设计的一种单人玩的计算机游戏(Garclner,M.,1970、1971)。
他与现代的围棋游戏在某些特征上略有相似:围棋中有黑白两种棋子。
生命游戏中的元胞有{"生","死"}两个状态 {0,1};围棋的棋盘是规则划分的网格,黑白两子在空间的分布决定双方的死活,而生命游戏也是规则划分的网格(元胞似国际象棋分布在网格内。
而不象围棋的棋子分布在格网交叉点上)。
根据元胞的局部空间构形来决定生死。
只不过规则更为简单。
下面介绍生命游戏的构成及规则:(1)元胞分布在规则划分的网格上;(2)元胞具有0,1两种状态,0代表"死",l代表"生";(3)元胞以相邻的8个元胞为邻居。
即Moore邻居形式;(4)一个元胞的生死由其在该时刻本身的生死状态和周围八个邻居的状态 (确切讲是状态的和)决定:·在当前时刻,如果一个元胞状态为"生",且八个相邻元胞中有两个或三个的状态为"生",则在下--时刻该元胞继续保持为"生",否则"死"去;·在当前时刻。
如果一个元胞状态为"死"。
且八个相邻元胞中正好有三个为"生"。
则该元胞在下一时刻 "复活"。
否则保持为"死"。
尽管它的规则看上去很简单。
但生命游戏是具有产生动态图案和动态结构能力的元胞自动机模型。
它能产生丰富的、有趣的图案。
生命游戏的优化与初始元胞状态值的分布有关,给定任意的初始状态分布。
经过若干步的运算,有的图案会很快消失。
而有的图案则固定不动,有的周而复始重复两个或几个图案,有的婉蜒而行。
有的则保持图案定向移动,形似阅兵阵……,其中最为著名的是"滑翔机 (叫Glider)"的图案。
生命游戏模型已在多方面得到应用。
他的演化规则近似地描述了生物群体的生存繁殖规律:在生命密度过小(相邻元胞数之2)时,由于孤单、缺乏配种繁殖机会、缺乏互助也会出现生命危机,元胞状态值由1变为0;在生命密度过大 (相邻元胞数>3)时,由于环境恶化、资源短缺以及相互竞争而出现生存危机,元胞状态值由1变为0;只有处于个体适中(相邻元胞数为2或3)位置的生物才能生存(保持元胞的状态值为1)和繁衍后代(元胞状态值由0变为1)。
正由于它能够模拟生命活动中的生存、灭绝、竞争等等复杂现象,因而得名"生命游戏"。
J·H·Conway还证明,这个元胞自动机具有通用图灵机的计算能力(谢惠民,1994;李才伟,1997),与图灵机等价,也就是说给定适当的初始条件,生命游戏模型能够模拟任何一种计算机。
从数学模型的角度看,该模型将平面划分成方格棋盘,每个方格代表一个元胞。
元胞状态:0 死亡,1- 活着领域半径:1领域类型:Moore型其中S t表示t时刻元胞的状态,S为8个相邻元胞中活着的元胞数。
另外,需要指出的是,目前随着人们对 "生命游戏"研究的深入,产生了许多变种和扩展。
在80年代末,A·K·Dewdney (Dewdney,A·K,1987)和C·Bays (Bays,C,1987)Dewdney,A·K·,1990)将Conway的生命游戏扩展到了三维空间上,构建了三维生命游戏,并对其规则作了具有普遍性的扩展(图2-3)。
C·Bays的学生Lee Meeker在此基础上进一步构建了四维的生命游戏。
另外,Gardner (Gardner,M·,1970、1971、1983)等人也曾在这方面作了很多迸一步的研究工作。
对游戏规则的扩展主要是引入了4个参数E b E k F b F k,E b表示对于一个"活"元胞,在下一个时刻,继续保持其状态所需要的最少的"活"邻居的数目,而F b则表示对于一个 "死"元胞,在下一时刻,"复活"所需要的最小的"活"邻居的数目,E k和F k则分别表示上述情况的上限值。