元胞自动机模型
元胞自动机模型的原理
元胞自动机模型的原理
元胞自动机(Cellular Automaton,CA)是一种离散化的动态系统,由一组相同的元胞组成,每个元胞都有自己的状态,它们可以根据一
定的规则进行状态转换。
元胞自动机模型的原理是基于这些元胞之间
的相互作用和状态转换,模拟出复杂的现象和行为。
元胞自动机模型的基本结构包括元胞、邻居、状态和规则。
元胞是模
型的基本单元,通常是一个正方形或立方体,每个元胞都有一个状态,可以是二进制、整数、浮点数等。
邻居是指与当前元胞相邻的其他元胞,通常是以当前元胞为中心的周围几个元胞。
规则是指元胞之间的
相互作用和状态转换规则,通常是一个函数,根据当前元胞和邻居的
状态,计算出下一个时刻的状态。
元胞自动机模型的演化过程是离散的,每个时刻都是一个状态,通过
规则计算出下一个时刻的状态,依次演化下去。
模型的演化可以是同
步的,即所有元胞同时进行状态转换,也可以是异步的,即每个元胞
按照一定的顺序进行状态转换。
模型的演化可以是确定性的,即规则
确定了下一个状态,也可以是随机的,即规则只是给出了下一个状态
的概率分布。
元胞自动机模型的应用非常广泛,可以用来模拟自然界中的现象和行
为,如生物群落的演化、物理系统的行为、社会网络的演化等。
元胞自动机模型还可以用来解决一些实际问题,如交通流量的优化、城市规划的设计等。
总之,元胞自动机模型是一种非常有用的数学工具,可以用来模拟复杂的现象和行为,具有很强的可视化和直观性,是研究自然界和社会现象的重要手段之一。
生物计算中的元胞自动机模型

生物计算中的元胞自动机模型生物计算是一种广泛应用于生物医学、生态学、环境科学等领域的计算科学技术,在生命科学领域具有重要的应用价值。
其中,元胞自动机(CAC)模型是一种重要的生物计算模型,它利用计算机进行模拟,可以模拟复杂生物系统中的自组织现象、动态行为和时间演化等。
一、元胞自动机模型的基本理论元胞自动机是一种基于格点的离散动力学系统,又称为离散动力学系统。
其基本理论是将时间和空间坐标离散化,并将空间上的每个点分为一个小的正方形或立方体,称为元胞。
元胞自动机在空间上排列成一个网格状结构,称为元胞阵列。
元胞内有若干个状态,每个元胞根据其自身状态和周围元胞的状态,按照一定的规则进行演化。
这种演化是基于更高级别的规则,通过这些规则,元胞可以表现出一定的自组织特性,从而模拟生物系统中的某些现象。
二、元胞自动机模型的应用1. 生态系统模拟元胞自动机模型也可用于模拟生态系统的行为,例如森林通量和生态系统中种群的分布。
实际上,1986年,Thomas和,Peterman的研究中,模拟了一个湖泊生态系统,通过模拟 algal (微藻)的数量,在不同时间的分布,研究了外部进入的营养元素对湖泊生态系统的影响。
2. 疾病传播元胞自动机模型也可以用于模拟疾病传播,例如感染病毒或细菌。
利用元胞自动机模拟疾病的传播,可以研究不同人群之间传染病的传播机制,并预测疾病传播的趋势。
2020年初的 COVID-19 疫情中,元胞自动机模型被用于模拟病毒传播,并预测疫情趋势,为政府决策者提供了科学有效的决策依据。
3. 细胞模拟元胞自动机模型可以用来模拟细胞的行为,例如细胞的组织结构、生长、分裂和死亡。
最近的一项研究使用元胞自动机模拟了肠道细胞的发育,向我们展示了细胞在肠道中的组织结构、形态变化和生长模式。
三、元胞自动机模型的优缺点1. 优点元胞自动机模型的主要优点是简单易行,易于理解和应用。
它能够模拟自然系统的复杂行为,例如非线性现象、自组织等,而不需要进行复杂的统计或计算。
元胞自动机模型程序
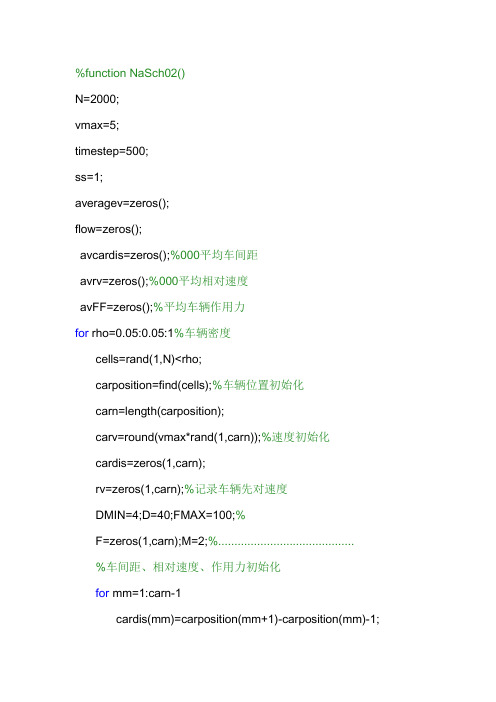
%function NaSch02()N=2000;vmax=5;timestep=500;ss=1;averagev=zeros();flow=zeros();avcardis=zeros();%000平均车间距avrv=zeros();%000平均相对速度avFF=zeros();%平均车辆作用力for rho=0.05:0.05:1%车辆密度cells=rand(1,N)<rho;carposition=find(cells);%车辆位置初始化carn=length(carposition);carv=round(vmax*rand(1,carn));%速度初始化cardis=zeros(1,carn);rv=zeros(1,carn);%记录车辆先对速度DMIN=4;D=40;FMAX=100;%F=zeros(1,carn);M=2;%..........................................%车间距、相对速度、作用力初始化for mm=1:carn-1cardis(mm)=carposition(mm+1)-carposition(mm)-1;rv(mm)=carv(mm+1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr if DMIN<cardis(mm)<DF(mm)=M*rv(mm)^2/cardis(mm);%..........................elseif cardis(mm)>Drv(mm)=0;F(mm)=0;elserv(mm)=0;F(mm)=FMAX;endend%..........................endmm=mm+1;cardis(mm)=N+carposition(1)-carposition(mm)-1;rv(mm)=carv(1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr rrrrrrrif DMIN<cardis(mm)<DF(mm)=M*rv(mm)^2/cardis(mm);%..........................elseif cardis(mm)>Drv(mm)=0;F(mm)=0;elserv(mm)=0;F(mm)=FMAX;endend%................................%车间距、相对速度、作用力初始化完成memor_cells=zeros(timestep,N);memor_cellv=zeros(timestep,N);memor_F=zeros(timestep,N);%............................memor_cardis=zeros(timestep,N);%000memor_rv=zeros(timestep,N);%000sumv=0;pmin=0.1;pmax=0.3; flag=0;%sumcardis=0;%00000000sumrv=0;%000for jj=1:timestep%开始更新for ii=1:carnif rv(ii)>=0flag=1;elseflag=0;endcarv(ii)=min(carv(ii)+1,vmax);%加速更新carv(ii)=min(carv(ii),cardis(ii));%减速if flag==1;pslow=pmin;elsepslow=pmax;endif rand(1)<pslowcarv(ii)=max(carv(ii)-1,0);%随机慢化endif (jj>100)sumv=sumv+carv(ii);%vvvvvvvvvvvvvvvvvvvvvvvvvvvv速度求和end%carpositon变化newposition=carposition(ii)+carv(ii);if newposition<=Ncarposition(ii)=newposition;elsecarposition(ii)=newposition-N;endmemor_cells(jj,carposition(ii))=1;end%速度位置更新完,进行车间距、相对速度的更新for mm=1:carn-1if carposition(mm)<carposition(mm+1)cardis(mm)=carposition(mm+1)-carposition(mm)-1;if cardis(mm)<vmax%rv(mm)=carv(mm+1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr rrrrrrrrrrrrrelse%rv(mm)=0;end%if cardis(mm)>D||cardis(mm)<DMINrv(mm)=0;end%F(mm)=M*rv(mm)^2/cardis(mm);%。
元胞自动机交通流模型.课件

模拟结果中流量与密度关系的曲线可以用来指导城市交通规划。在规划道路时,应考虑车辆密度对交通 流量的影响,合理设置道路宽度和车道数量。
模拟结果的比较与评价
不同模型之间的比较
我们将元胞自动机交通流模型的结果与其他经典交通流模型进行了比较。通过比较发现 ,元胞自动机模型能够更好地模拟实际交通情况,特别是在复杂路况和多车道情况下的
物流配送
利用元胞自动机模型模拟物流配 送过程中的车辆行驶和货物运输 ,优化配送路线和策略。
公共安全
元胞自动机模型可用于模拟人群 流动和应急疏散,为公共安全事 件提供决策支持。
环境影响评估
通过模拟污染物在环境中的扩散 和迁移,元胞自动机模型有助于 评估环境影响和制定环境保护措 施。
元胞自动机交通流模型的未来研究方向
元胞自动机的应用领域
交通流模拟
元胞自动机可以模拟和分析交通流的 行为和特性,如拥堵现象、车速分布 等。
城市规划
元胞自动机可以用于模拟城市的发展 和演化,预测城市扩张和人口分布等 。
生态学
元胞自动机可以用于模拟生态系统的 行为和演化,如物种竞争、群落演替 等。
社会学
元胞自动机可以用于模拟和分析社会 现象,如人口迁移、群体行为等。
表现更优。
模型的优缺点分析
元胞自动机交通流模型具有简单、易实现和可扩展性强的优点,但也存在计算量大、模 拟结果受参数设置影响较大的缺点。在实际应用中,需要根据具体需求和条件选择合适
的模型。
05
CHAPTER
元胞自动机交通流模型的应 用前景与展望
元胞自动机交通流模型在交通规划与管理中的应用前景
交通流模拟
阻塞波传播
在模拟中,我们观察到了阻塞波 在道路上的传播现象。当一辆慢 车出现时,后面的车辆会逐渐减 速并形成阻塞波,导致交通拥堵
元胞自动机

除了格子气元胞自动机在流体力学上的成功应用。元胞自动机还应用于磁场、电场等场的模拟,以及热扩散、 热传导和机械波的模拟。另外。元胞自动机还用来模拟雪花等枝晶的形成。
元胞自动机可用来通过模拟原子、分子等各种微观粒子在化学反应中的相互作用,而研究化学反应的过程。 例如李才伟 (1997)应用元胞自动机模型成功模拟了由耗散结构创始人I·Prgogine所领导的Brussel学派提出 的自催化模型---Brusselator模型,又称为三分子模型。Y·BarYam等人利用元胞自动机模型构造了高分子的聚 合过程模拟模型,在环境科学上,有人应用元胞自动机来模拟海上石油泄露后的油污扩散、工厂周围废水、废气 的扩散等过程的模拟。
元胞自动机
格动力学模型
01 基本介绍
03 具体解释 05 应用
目录
02 通俗解释 04 分别描述
元胞自动机(cellular automata,CA)是一种时间、空间、状态都离散,空间相互作用和时间因果关系为局 部的格动力学模型,具有模拟复杂系统时空演化过程的能力。
基本介绍
不同于一般的动力学模型,元胞自动机不是由严格定义的物理方程或函数确定,而是用一系列模型构造的规 则构成。凡是满足这些规则的模型都可以算作是元胞自动机模型。因此,元胞自动机是一类模型的总称,或者说 是一个方法框架。其特点是时间、空间、状态都离散,每个变量只取有限多个状态,且其状态改变的规则在时间 和空间上都是局部的。
元胞自动机用于兔子-草,鲨鱼-小鱼等生态动态变化过程的模拟,展示出令人满意的动态效果;元胞自动机 还成功地应用于蚂蚁、大雁、鱼类洄游等动物的群体行为的模拟;另外,基于元胞自动机模型的生物群落的扩散 模拟也是当前的一个应用热点。在信息学中。元胞自动机用于研究信息的保存、传递、扩散的过程。另外。 Deutsch(1972)、Sternberg(1980)和Rosenfeld(1979)等人还将二维元胞自动机应用到图像处理和模式识别 中 (WoIfram.S.,1983)。
元胞自动机模型步骤
元胞自动机模型是一种模拟系统行为的离散模型,其中每个元素被称为元胞,它们遵循一组规则进行状态转移。
以下是构建元胞自动机模型的步骤:1.确定元胞空间首先,确定元胞的空间布局。
元胞空间通常是一个网格,元胞在网格中的位置可以用行和列的坐标表示。
根据问题的具体需求,可以选择不同大小的网格和元胞数量。
2.定义状态转移规则接下来,需要定义元胞的状态转移规则。
每个元胞的状态在一定时间步会根据一组规则进行更新。
这些规则通常包括相邻元胞的状态以及当前元胞的状态,它们共同决定了下一个状态。
例如,在“康威生命游戏”中,每个元胞的存活、死亡或繁殖取决于相邻元胞的状态。
3.初始化元胞状态在开始模拟之前,需要初始化元胞的状态。
这通常是一个随机过程,但也可以根据特定的问题背景进行初始化。
每个元胞都被赋予一个初始状态,这些状态在后续的迭代中会发生变化。
4.迭代更新状态迭代更新状态是模型的核心步骤,它涉及根据定义的规则将每个元胞从当前状态转移到下一个状态。
通常使用循环或递归实现这个步骤,每次迭代都根据当前状态计算下一个状态。
迭代过程中,可以记录下每个元胞的历史状态,以便后续分析。
5.分析结果最后,根据模型的实际应用,可以对结果进行分析。
例如,如果模型用于模拟生物群体的演化,可以观察不同时间步的群体结构变化;如果用于模拟交通流,可以分析交通拥堵的形成和传播。
此外,还可以通过可视化工具展示元胞自动机模型的状态演化过程。
总之,元胞自动机模型是一种强大的工具,可用于模拟各种复杂系统的行为。
通过以上步骤,可以构建出具有不同应用背景的元胞自动机模型,并通过迭代更新状态和分析结果来揭示系统的内在规律。
元胞自动机交通流模型
二、NS 模型
在第184号规则的基础上,1992年,德国学者 Nagel和Schreckenberg提出了一维交通流CA模型, 即,NS 模型(或NaSch模型) Nagel and Schreckenberg. A Cellular automaton model for freeway traffie.Journal of Physics(France),1992 CA模型最基本的组成包括四个部分:元胞(cell )、 元胞空间(lattice)、邻域(neighbor)及更新规则 (rule)。
d) 延迟加速 4)位置更新:车辆前进
例:设
vmax 2
a)加速过程
b)安全刹车过程
c)随机慢化过程
(以随机慢化概率p)
d)位置更新
在NS 模型的基础上,又陆续地提出了一系列一维 CA交通模型,如TT、BJH、VDR、FI等模型; 双车道CA交通模型:STNS模型 机非混合CA模型: CCA模型 城市路网CA二维模型: BML、CTM模型
场科学变革。
Free online access: /
90号规则:分形结构 ——CA_rule_90.m
110号规则:复杂结构 ——CA_rule_110.m
§2 元胞自动机交通流模型
一、第184号规则 特别注意:第184号规则
100 90 80
初始 随机
×7.5m
随机慢化概率p=0.2;密度ρ=27veh/km/lan(0.2);
初始 均匀 分布
×7.5m
随机慢化概率p=0.2;密度ρ=33veh/km/lan(0.25);
×7.5m
交通流CA模型的主要优点:
元胞自动机NaSch模型及其MATLAB代码
元胞自动机NaSch模型及其MATLAB代码作业要求根据前面的介绍,对NaSch模型编程并进行数值模拟:模型参数取值:Lroad=1000,p=0.3,Vmax=5。
边界条件:周期性边界。
数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的结果。
基本图(流量-密度关系):需整个密度范围内的。
时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致, 画500个时间步即可)。
指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思路。
流量计算方法:密度=车辆数/路长;流量flux=density×V_ave。
在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N;流量flux=N/T。
在计算过程中可都使用无量纲的变量。
1、NaSch模型的介绍作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。
时间、空间和车辆速度都被整数离散化。
道路被划分为等距离的离散的格子,即元胞。
每个元胞或者是空的,或者被一辆车所占据。
车辆的速度可以在(0~Vmax)之间取值。
2、NaSch模型运行规则在时刻t到时刻t+1的过程中按照下面的规则进行更新:(1)加速:vnmin(vn1,vmax)规则(1)反映了司机倾向于以尽可能大的速度行驶的特点。
(2)减速:vnmin(vn,dn)规则(2)确保车辆不会与前车发生碰撞。
(3)随机慢化:以随机概率p进行慢化,令:vnmin(vn-1,0)规则(3)引入随机慢化来体现驾驶员的行为差异,这样既可以反映随机加速行为,又可以反映减速过程中的过度反应行为。
这一规则也是堵塞自发产生的至关重要因素。
(4)位置更新:,车辆按照更新后的速度向前运动。
其中vn,xn 分别表示第n辆车位置和速度;l(l≥1)为车辆长度;p表示随机慢化概率;表示n车和前车n+1之间空的元胞数;vmax为最大速度。
元胞自动机模型
元胞行为
局部变化引起全局变化
*可以简单认为元胞自动机在运动上 类似于波.
*无胞的状态变化依赖于自身状态和 邻居的状态
元胞自动机的规则 某元胞下时刻的状态只决定于邻居的状 态以及自身的初始状态.
元胞行为
元胞网格
元胞行为
元胞邻居
经典元胞
生命游戏
生命游戏 (Came of Life)是J. H. Conway 在2世纪6年代末设计的一种单人玩的计算 机游戏(Garclner,M.,97、97)。他与现 代的围棋游戏在某些特征上略有相似:围 棋中有黑白两种棋子。生命游戏中的元胞 有{"生","死"}两个状态 {,};围棋的棋盘是 规则划分的网格,黑白两子在空间的分布 决定双方的死活,而生命游戏也是规则划 分的网格(元胞似国际象棋分布在网格内。 而不象围棋的棋子分布在格网交叉点上)。 根据元胞的局部空间构形来决定生死。只 不过规则更为简单。
规则:
根据元胞当前状态及其邻居状况确
定下一时刻该元胞状态的动力学函 数,简单讲,就是一个状态转移函 t 数。 f : S it 1 f S it , S N
根据上面对元胞自动机的组成分析,我 们可以更加深入地理解元胞自动机的概 念。 可以将元胞自动机概括为一个用数 学符号来表示的四元组。 A Ld , S , N , f A:代表一个元胞自动机系统;Ld:代表 元胞空间;d:为空间维数;S:是元胞 有限的离散的状态集合;N:表示邻域 内所有元胞的组合(包括中心元胞在 内);f:是局部转换函数,也就是规则。
什么是元胞(CA)自动机
元胞自动机(Cellular Automata,简称CA) 实质上是定义在一个由具有离散、有限状态 的元胞组成的元胞空间上,并按照一定的局 部规则,在离散的时间维度上演化的动力学 系统。
元胞自动机模型
元胞自动机的组成
二维元胞自动机三种网格划分
元胞自动机的组成
三类网格划分的优缺点对比:
元胞自动机的组成
• 邻居:以上的元胞及元胞空间只表示了系统的
静态成分,为将“动态”引入系统,必须加入演 化规则。在元胞自动机中,这些规则是定义在 空间局部范围内的,即一个元胞下一时刻的状 态决定于本身状态和它的邻居元胞状态。因而, 在指定规则之前,必须定义一定的邻居规则,确 定哪些元胞属于该元胞的邻居。
• 元胞空间:即元胞所分布的空间网点集合。元
胞空间的划分在理论上可以是任意维数的欧几 里德空间规则划分。目前研究主要集中在一维 和二维元胞自动机上。对于一维元胞自动机, 元胞空间的划分只有一种,而高维的元胞自动 机,元胞空间的划分可有多种形式。最为常见 的二维元胞自动机,其元胞空间通常可按三角、 四方或六边形三种网格排列。
元胞自动机的概念
元胞自动机(CA)是时间、空间、状态都离散,空 间的相互作用及时间上因果关系皆局部的网格动力 学模型。元胞自动机模型不同于一般的动力学模型, 没有明确的方程形式,而是包含了一系列模型构造的 规则,凡是满足这些规则的模型都可以算作是元胞自 动机模型。因此,确切地说,元胞自动机是一类模型的 总体、或者说是一个方法框架。
元胞自动机的特征
• 开放性和灵活性 • 离散性和并行性 • 空间性 • 局部性 • 高维性
生命游戏
生命游戏其实是一个零玩家游戏,它包括一 个二维矩形世界,这个世界中的每个方格居住 着一个活着的或死了的细胞。一个细胞在下一 个时刻生死取决于相邻八个方格中活着的或死 了的细胞的数量。如果相邻方格活着的细胞数 量过多,这个细胞会因为资源匮乏而在下一个 时刻死去;相反,如果周围活细胞过少,这个 细胞会因太孤单而死去。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
元胞行为
局部变化引起全局变化
*可以简单认为元胞自动机在运动上 类似于波.
*无胞的状态变化依赖于自身状态和 邻居的状态
元胞自动机的规则
某元胞下时刻的状态只决定于邻居的状 态以及自身的初始状态.
元胞行为
元胞网格
元胞行为
元胞邻居
经典元胞
生命游戏
生命游戏 (Came of Life)是J. H. Conway 在2世纪6年代末设计的一种单人玩的计算机 游戏(Garclner,M.,97、97)。他与现代的 围棋游戏在某些特征上略有相似:围棋中有 黑白两种棋子。生命游戏中的元胞有{"生"," 死"}两个状态 {,};围棋的棋盘是规则划分的 网格,黑白两子在空间的分布决定双方的死 活,而生命游戏也是规则划分的网格(元胞似 国际象棋分布在网格内。而不象围棋的棋子 分布在格网交叉点上)。根据元胞的局部空间 构形来决定生死。只不过规则更为简单。
程序实现
典型元胞程序精讲
交通流
谢谢!
生命游戏的构成及规则: *元胞分布在规则划分的网格上; *元胞具有,两种状态,代表“死”,l代表“生”; *元胞以相邻的8个元胞为邻居。即Moore邻居形式; *一个元胞的生死由其在该时刻本身的生死状态和周 围八个邻居的状态 (确切讲是状态的和)决定: 在当前时刻,如果一个元胞状态为“生”,且八 个相邻元胞中有两个或三个的状态为“生”,则在下-时刻该元胞继续保持为“生”,否则“死”去; 在当前时刻。如果一个元胞状态为"死"。且八个 相邻元胞中正好有三个为"生"。则该元胞在下一时刻 " 复活"。否则保持为"死"。
元胞的状态可以是二进制形式,如: (0,1),(生,死),(黑、白)等 ; 也可以在一个有限整数集内S内取值: 如交通领域的CA模型中,有时元胞状 态可在[-(Vmax+1)~Vmax+1)]之间取 值。 状态参量:严格意义上的CA只能有一 个状态参量;但是,在实际应用中,可 以具有多个状态参量。
元胞自动机模型
元胞自动机(cellular automata, CA) 模型是 最具代表性的微观离散模型, 最早由 V on Neumann 和 Ulam 提出。 22011122 王东岩 22011223 王果 22011323 王语海 22011326 周崎轩 东南大学 22011328 宋国强
MATLAB的编程考虑
简单的实现规则
x = 2:n-1; y = 2:n-1; sum(x,y) = cells(x,y-1) + cells(x,y+1) + ... cells(x-1, y) + cells(x+1,y) + ... cells(x-1,y-1) + cells(x-1,y+1) + ... cells(x+1,y-1) + cells(x+1,y+1); cells = (sum==3) | (sum==2 & cells);
定值型边界条件 定义:所有边界外元胞均取某一固定常量
绝热型边界条件
定义:在指边界外邻居元胞的状态始终和边界元胞的状态保持
一致,即具有状态的零梯度
*反射型边界条件
定义:在边界外邻居的元胞状态是以边界元胞为轴 的镜面反射。
邻居:
冯-诺依曼(Von. Neumann)型
定义如下:
摩尔(Moore)型
Fgy Fpy Net Fp
程序实现
MATLAB的编程考虑
矩阵和图形的相互转化
Image Imshow pcolor 1 1 0 1 1 0 1 1 1 0 1 0 1 0 1 1 1 1 1 0 imread
程序实现
MATLAB的编程考虑
初始化元胞状态
z = zeros(n,n); cells = z; cells(n/2, .25*n:.75*n) =1 ; cells(.25*n:.75*n, n/2) =1;
程序实现
MATLAB的编程考虑
简单的实现规则
y=2:n-1; x=2:n-1; sum = veg(y, x+1)+… veg(y, x -1)+ ... veg(y+1, x )+… veg(y -1, x ) ; (y+1,x)
(y,x-1) (y,x) (y,x-1)
(y-1,x)
程序实现
Sit 1 f (Sit1 , Sit , Sit1 )
. Wolfram的初等元胞自动机
由于只有0、1两种状态, 所以函数f共有28=256种状 态
256种初等CA规则
元胞自动机的构成
元胞自动机最基本的组成:元胞、
元胞空间、邻居及规则四部分。另 外,还应包含状态和时间。
可以视为由一个元胞空间和定义于
应用举例
数学建模中的应用
The Booth Tolls for Thee
应用举例
Cell 0y
数学建模中的应用
Modeling Flooding from a Dam Failure in South Carolina
Y Cell 2y Fpx x Cell 0x
Cell 1
Fgx
Cell 2x
程序实现
典型元胞程序精讲
森林火灾
sum = (veg(1:n,[n 1:n-1])==1) + (veg(1:n,[2:n 1])==1) + ... (veg([n 1:n-1], 1:n)==1) + (veg([2:n 1],1:n)==1) ; veg = ... 2*(veg==2) - ((veg==2) & (sum> 0 | (rand(n,n)< Plightning))) + ... 2*((veg==0) & rand(n,n)< Pgrowth) ;
什么是元胞(CA)自动机
元胞自动机(Cellular Automata,简称CA) 实质上是定义在一个由具有离散、有限状态 的元胞组成的元胞空间上,并按照一定的局 部规则,在离散的时间维度上演化的动力学 系统。
1.CA之所以是离散系统,是因为元胞是定义在有限 的时间和空间上的,并且元胞的状态是有限。 2.CA被认为是动力学模型,是因为它的举止行为 具有动力学特征
该空间的变换函数所组成。
元胞自动机的构成示意图
元胞:元胞又可称为单元、细胞或基元,是 元胞自动机的最基本的组成部分。元胞分 布在离散的一维、二维或多维欧几里德空 间的晶格点上。 具有以下特点: 1.元胞自动机最基本的单元. 2.元胞有记忆贮存状态的功能. 3.所态
计算机科学与信息学领域:元胞自动机的 逻辑思维方法为并行机的发展提供了另一 个理论框架。20世纪80年代,T. Toffoli和 N.H. Margolus 制造出第一台通用元胞自 动机计算机CAM6,其性能可与当时的巨 型计算机相比拟,并且其图形显示功能明 显优于其他类型的计算机。元胞自动机还 被用来研究信息的保存、传递、扩散的过 程。除此之外,元胞自动机在图像处理和 模式识别中也体现出了其独到的优势 。
生态学领域:元胞自动机被用于兔
子-草,鲨鱼-小鱼等生态系统动态 变化过程的模拟,展示出令人满意 的动态效果;元胞自动机还成功地 应用于蚂蚁的行走路径,大雁、鱼 类洄游等动物的群体行为的模拟; 另外,基于元胞自动机模型的生物 群落的扩散模拟也是当前的一个应 用热点。
物理学领域:在元胞自动机基础之上发展出来的 格子气自动机(LGA)和格子-波尔兹曼方法(LBM) 在计算流体领域获得了 巨大的成功。不仅能够解 决传统流体力学计算方法所能解决的绝大多数问 题,并且在多孔介质、 多相流、微小尺度方面具 有其独特的优越性。格子-波尔兹曼方法还被成功 地应用于磁场、电场、热扩散和热传导的模拟。 另外,元胞自动机还被用来模拟雪花等枝晶的形 成、液态金属材料的凝固结晶过程以及颗粒材料 的垮塌现象等。
元胞自动机不是由严格定义的
物理方程或函数确定,而是用 一系列模型构造的规则构成。 凡是满足这些规则的模型都可 以算作是元胞自动机模型。因 此,元胞自动机是一类模型的 总称,或者说是一个方法框架
初等元胞自动机
初等元胞自动机是状态集S只有两个元素{s1, s2},即状态个数k=2,邻居半径r=1的一维元 胞自动机。由于在S中具体采用什么符号并不 重要,它可取 {0,1},{-1,1},{静止,运动} 等等,重要的是S所含的符号个数,通常我们 将其记为 {0,1}。此时,邻居集N的个数2· r=2, 局部映射f:S3→S可记为:
x *一个燃烧着的元胞(状态为1)在下一时时刻变成空位的 (状 态为 ).
*空元胞以一个低概率(例如. )变为森林以模拟生长.
*出于矩阵边界连接的考虑,如果左边界开始着火,火势将向 右蔓延,右边
界同理.同样适用于顶部和底部.
元胞自动机应用
生物学领域:因为元胞自动机的设计思 想本身就来源于生物学自繁殖的现象, 所以它在生物学上的应用更为自然而广 泛。 例如元胞自动机用于肿瘤细胞的增 长机理和过程模拟、人类大脑的机理探 索、爱滋病病毒HIV的感染过程、自组 织、自繁殖等生命现象的研究以及最新 流行的克隆 (clone)技术的研究等。另 外, 元胞自动机还可以用来模拟植物的 生长过程以及贝壳上的色素沉积图案
交通科学领域:1986年,M. Cremer和J. Ludwig初次将元胞自动机运用到车辆交通的研究 中。随后,元胞自动机在车辆 交通中的应用主要 沿着两条主线展开:对城市道路交通流的研究, 以Nagel-Schreckenberg模型为代表;对城市交 通网络 的研究,以BML模型为代表。另外,80年 代以来,计算机水平日新月异的发展为元胞自动 机的 应用提供了强有力的支持。因此,在进入上 个世纪90年代后,元胞自动机在交通流理论研究 领域中得到了广泛的应用