毕业设计论文四旋翼飞行器PID控制器的设计
四翼飞行器论文

四旋翼无人直升机论文摘要四旋翼飞机由于其结构复杂、操纵性差等缺点导致其研究进展较为缓慢。
近些年来,随着新型材料、微机电(MEMS)、微惯导(MIMU)技术和飞行控制理论的发展,四旋翼无人直升机获得了越来越多地关注。
四旋翼无人直升机在军事和民用领域具有广阔的应用前景,可用来环境监视、情报搜集、高层建筑实时监控、协助和救助、电影拍摄和气象调查等;它还是火星探测无人飞行器的重要的研究方向之一。
本文针对小型四旋翼无人直升机,以TMS320F28335为核心,设计了四旋翼无人直升机控制器的软硬件系统,实现了近地环境下的姿态控制。
首先,根据设计目标对控制系统总体结构、软硬件整体进行设计。
按功能将控制系统划分成机体平台、控制器模块、传感器模块、电源模块、数据处理模块和通讯模块六个独立的模块。
为了克服A/D转换存在的偏差和高频噪声问题,本文设计了软件矫正算法数字低通滤波器,减少了A/D偏差,降低了高频噪声。
姿态控制是飞行控制的核心问题,四旋翼无人直升机的结构特殊性决定了其控制器设计的特殊性:四旋翼无人直升机通过四个螺旋桨实现对六个被控量的控制,是一个欠驱动系统。
本文建立了四旋翼无人机的非线性动力学模型,设计了PID控制器进行姿态控制。
仿真和实际系统控制结果表明,该PID控制器可以得到较好的姿态控制效果,验证了控制系统设计的有效性。
关键词:四旋翼无人直升机,控制器,捷联惯导,DSP一、绪论1.1 引言与固定翼飞机相比,旋翼机具有垂直起降的能力。
四旋翼直升机是一种外形独特的旋翼机,国外对四旋翼飞机有多种叫法,如four-rotor、Quardrotor、X4-Flyer、4 rotors helicopter等等。
由于结构的对称性,四旋翼直升机在操纵性和机械机构方面具有很多潜在的优势。
如图1.1所示,旋翼1、3顺时针旋转,旋翼2、4逆时针旋转,旋翼的扭矩会自动平衡。
而传统直升机必须加一个尾翼用来平衡旋翼扭矩,这个尾翼对向上的推力无帮助作用,浪费了能量。
基于PID的四旋翼姿态控制

Electronic technology・ 电子技术Electronic Technology & Software Engineering 电子技术与软件工程• 175【关键词】四旋翼姿态控制 PI-PD 控制器 控制效果 参数整定近年来,随着微型系统、微型传感器、惯导技术以及飞行控制等技术的发展,四旋翼飞行器(以下简称四旋翼)引起了人们的广泛关注。
四旋翼是通过改变四个旋翼的转速来调整其在空中的飞行姿态,包括俯仰角θ、横滚角φ、偏航角ψ,从而控制机体水平方向上的运动,因此四旋翼的姿态控制是决定其飞行性能的关键所在。
在工业过程控制和航空航天控制等领域中,PID 控制的应用达到80 %以上,不过由于四旋翼系统的强非线性、惯性和延迟,PID 控制器对四旋翼姿态的调整效果往往出现较多的系统超调量,或者调整时间较长,控制效果并不令人满意。
因此,设计一种能够抑制系统超调量,并且保证系统快速收敛的控制器,可以提高四旋翼系统的稳定性和控制性。
1 PID控制器基本原理PID 控制器结构简单、方便调试,广泛应用于工业生产中。
PID 控制器是根据系统输出的误差值调节系统输出的控制形式,包含比例控制(P )、积分控制(I )和微分控制(D ),基于PI-PD 控制器的四旋翼姿态控制文/唐健杰 王鑫其连续PID 控制的结构形式为:(1)其中u(t)为系统输出,Kp 、Ki 、Kd 分别为比例、积分和微分系数,e(t)=y(r)-y(t)为期望值与输出量的差值,即输出误差。
而对于数字控制系统,可将PID 控制器离散化,得到离散PID 的结构形式:(2)其中,为所有误差值累加之和,Δe(t)=e(t)-e(t-1),等效微分运算。
当期望值在相邻的采样周期保持不变时,y(r)=y(r-1),Δe(t)=-y(t)+y(t-1),Δe(t)即为系统输出的变化量。
若基于PID 控制器来对四旋翼的姿态进行调控,参数整定难度较大,调控效果不佳。
四轴飞行器飞行原理与双闭环PID控制

四轴飞行器是微型飞行器的其中一种,相对于固定翼飞行器,它的方向控制灵活、抗干扰能力强、飞行稳定,能够携带一定的负载和有悬停功能,因此能够很好地进行空中拍摄、监视、侦查等功能,在军事和民用上具备广泛的运用前景。
四轴飞行器关键技术在于控制策略。
由于智能控制算法在运行复杂的浮点型运算以及矩阵运算时,微处理器计算能力受限,难以达到飞行控制实时性的要求;而PID控制简单,易于实现,且技术成熟,因此目前主流的控制策略主要是围绕传统的PID控制展开。
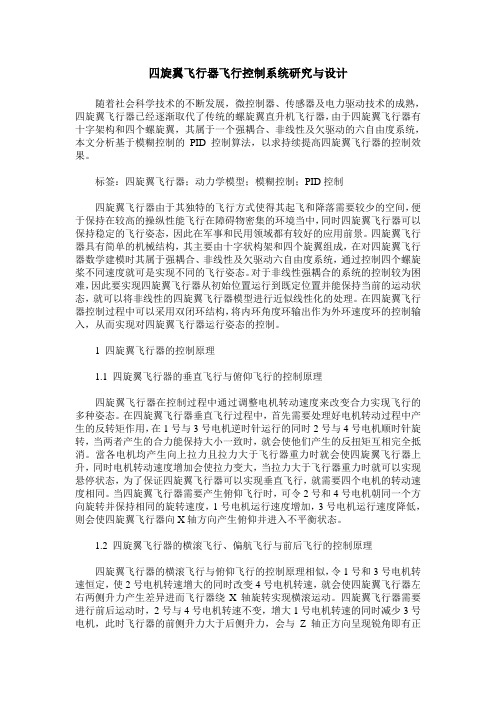
1 四轴飞行器的结构与基本飞行原理四轴飞行器结构主要由主控板和呈十字交叉结构的4个电子调速器、电机、旋浆组成,电机由电子调速器控制,主控板主要负责解算当前飞行姿态、控制电调等功能。
以十字飞行模式为例,l号旋翼为头,1、3号旋翼逆时针旋转,2、4号旋翼顺时针旋转,如图1所示。
图1 四轴飞行器结构图参照飞行状态表1变化电机转速,由于四个电机转速不同,使其与水平面倾斜一定角度,如图l所示。
四个电机产生的合力分解为向上的升力与前向分力。
当重力与升力相等时,前向分力驱动四轴飞行器向倾斜角度的方向水平飞行。
空间三轴角度欧拉角分为仰俯角、横滚角、航向角:倾斜角是仰俯角时,向前、向后飞行;倾斜角是横滚角时,向左、向右飞行;而倾斜航向角时,向左、右旋转运动,左(右)旋转是由于顺时针两电机产生的反扭矩之和与逆时针两电机产生的反扭矩之和不等,即不能相互抵消,机身便在反扭矩作用下绕z轴自旋转。
2 姿态解算四轴飞行器运用姿态解算计算出空间三轴欧拉角。
结构框架如图2所示,陀螺仪采样三轴角速度值,加速度传感器采样三轴加速度值,而磁力传感器采样得到三轴地磁场值,将陀螺仪、加速度传感器、磁力传感器采样后的数据进行标定、滤波、校正后得到三轴欧拉角度,其中陀螺仪和加速度传感器选用MPU6050芯片,磁力传感器选用HMC5883L芯片,采用IIC总线与主控板通信。
图2 姿态解算结构图由于传感器存在器件误差,因此在使用前需要标定。
4基于PID控制的X模式四旋翼飞行器研究_黄军友

X 模式四旋翼飞行器具有载荷轻、体积小、自主飞行、控制复杂等特点,基于PID 控制的X 模式四旋翼飞行器,飞行控制的系统硬件设计的总体要求选择低功耗电子设备、高性能遥控接收设备、高速微处理器、良好的可扩展性、强抗干扰性等。
可靠性、可行性、先进性、实时性和高集成度是具体的方案设计过程中应该重点考虑。
1硬件设计X 模式该模式以两根轴的正中间为前进方向,调节迅速,由两个电动机共同完成一个轴的控制,前进方向为电动机1和电动机2中间的方向,如图1所示。
飞行控制板是整个系统的核心,包括电源接口电路、遥控接收电路、姿态检测传感器电路、PWM 信号输出电路、编程接口电路、信号指示电路等。
采用ST 公司基于Cortex-M3内核的STM32F103C8T6的32位ARM 芯片,外设有定时器、ADC 、SPI 、I2C 、USART 和USB 等[1]。
电子调速器(ESC )采用好盈电调产品,遥控采用2.4G 天地飞-7遥控器。
1.1电源接口电路电源接口电路是采用5V 转3.3V 的三端稳压芯片LM1117,由于飞行控制板体积比较小所以采用了SOT-223的封装。
下图中的C 20与C 17均为退耦电容,大小为0.1μF ,C 18为钽电容起稳压的作用,大小为47μF ,如图2所示。
1.2姿态检测传感器电路姿态传感器包括陀螺仪传感器、加速度计传感器。
陀螺仪传感器选择村田公司的ENC-03RC ,测量范围为-300度每秒~+300度每秒,输出0~3.3V 的模拟信号,在未测量到角速度信号时输出的电压为1.35V 。
加速度计传感器选择飞思卡尔公司的MMA7361三轴的模拟加速度计传感器,可以工作在±1.5G 和±6G 两种状态,工作在±1.5G 模式时为800mV/g 。
基于PID 控制的X 模式四旋翼飞行器研究黄军友(四川信息职业技术学院四川广元628000)摘要:设计了X 模式四旋翼飞行器飞行控制系统的总体方案;在此基础上,完成了飞行控制系统的软硬件设计,包括器件选型、硬件电路设计、系统软件设计,并把互补滤波器应用于姿态解算,姿态控制部分采用PID (Proportional Inte -gral Derivative )控制器。
四旋翼飞行器建模与PID控制器设计
Vo l I 21 No _ 2 3
电 子 设 计 工 程
El e c t r o n i c De s i g n En g i n e e r i n g
2 0 1 3年 1 2月
De e . 2 01 3
四旋 翼 飞行 器建模 与 P I D 控制 器设计
关 键 词 :四 旋 翼 飞 行 器 ; L P V;非 线 性 建 模 ; P I D控 制
中 图 分类 号 : T N 7 9
文献标识码 : A
文 章 编 号 :1 6 7 4 - 6 2 3 6 ( 2 0 1 3 ) 2 3 - 0 1 4 7 - 0 4
Mo d e l i ng a n d PI D c o nt r o l f 0 r a q ua d r o t o r
近年来 , 随着新 型材料 、 微 机电 ( ME MS ) 、 微惯 导 ( MI MU)
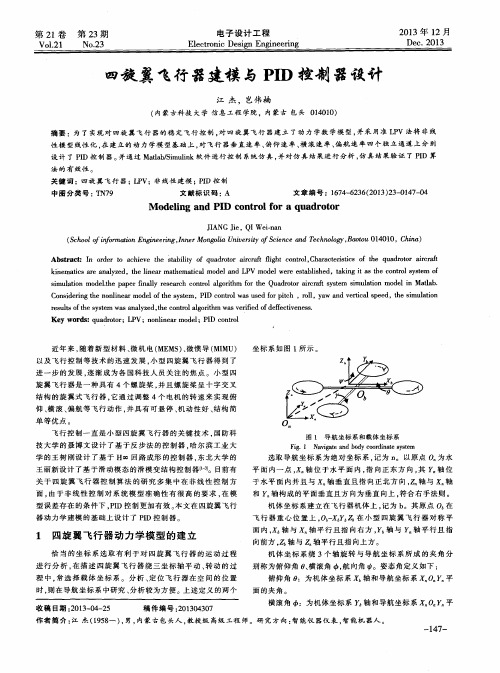
坐标系如 图 l 所示 。
以 及 飞 行 控 制 等 技 术 的迅 速 发 展 , 小 型 四旋 翼 飞 行 器 得 到 了 进 一 步 的发 展 , 逐 渐 成 为 各 国科 技 人 员 关 注 的焦 点 。小 型 四 旋 翼 飞 行 器 是 一 种 具 有 4个 螺 旋 桨 , 并 且 螺 旋 桨 呈 十 字 交 叉 结构的旋翼式 飞行器 。 它 通 过 调 整 4个 电 机 的 转 速 来 实 现 俯 仰、 横滚、 偏航 等飞行动作 , 并具有可 悬停 、 机 动性好 、 结 构 简 单等优点 。 飞 行 控 制 一 直 是 小技 大 学 的聂 博 文 设 计 了基 于 反 步 法 的控 制器 。 哈 尔 滨 工 业 大
江 杰 ,岂伟 楠
毕业设计论文四旋翼飞行器PID控制器的设计

第一章 四旋翼飞行器概述
1.1引言
目前国内外对飞行器的研究主要包括三种:固定翼、旋翼及扑翼式,四旋翼飞行器在布局形式上属于旋翼式的一种。国外早在上世纪初期就开始研究四旋翼飞行器。这种飞行器由军方率先研发并制造用于情报侦查等领域。很多科技企业、大学及研究所也研发并实现了自己的四旋翼飞行器。
目前,国内有很多致力于开源四旋翼飞行器研发的科技企业及技术团队,最受欢迎的有匿名科创开发的匿名四轴,圆点博士小四轴等。匿名四轴的控制方法主要是对姿态欧拉角进行控制,圆点博士小四轴主要是对姿态四元数进行控制,控制效果都很好。这给很多电子技术爱好者提供了丰富的学习资料。
国内有很多针对多旋翼飞行器的技术论坛,也有很多技术论坛专门开设了四旋翼飞行器讨论版块,汇聚了众多四旋翼飞行器的爱好者,提供了飞行器技术学习和提升的平台。
本设计主要介绍一种四旋翼飞行器的实现方案,以意法半导体公司生产的基于AMR Cortex-M3内核的STM32F103C8T6微型控制器作为计算控制单元,以Invensense公司生产的MPU6050作为惯性测量单元,整合飞行器姿态,以NRF24L01无线通信模块作为通信渠道,实现了上位机与下位机各项数据的实时传输,使用WFLY07遥控器实现了对四旋翼飞行器的无线遥控。本文详细介绍了四旋翼飞行器的飞行原理、硬件构造和软件设计,设计了一种PID控制器,实现了四轴飞行器的各项动作控制。
Yaw角为偏航角,如图,机体绕Z轴旋转产生原来XOZ面的夹角,为偏航角。
在+模式下,A组螺旋桨与B组螺旋桨基本没有关系。实现基本的飞行动作只需调节一组螺旋桨的转速。当四个螺旋桨转速相同时,螺旋桨间的扭力矩相互抵消,实现飞行器姿态水平,如果增加螺旋桨的转速,可实现飞行器上升,下降等动作。当1、3号螺旋桨转速增加,而2、4号螺旋桨转速不变时,飞行器可以实现偏航。当1、3号螺旋桨转速不变,2号螺旋桨转速增加,4号螺旋桨转速减小,飞行器可实现横滚运动,即飞行器向左飞。当2、4号螺旋桨转速不变,1号螺旋桨转速增加,3号螺旋桨转速减小,飞行器可实现俯仰运动,即飞行器向前后飞。由此,可以想像飞行器在不同螺旋桨转速下的飞行动作。
四旋翼飞行器飞行控制系统研究与设计
四旋翼飞行器飞行控制系统研究与设计随着社会科学技术的不断发展,微控制器、传感器及电力驱动技术的成熟,四旋翼飞行器已经逐渐取代了传统的螺旋翼直升机飞行器,由于四旋翼飞行器有十字架构和四个螺旋翼,其属于一个强耦合、非线性及欠驱动的六自由度系统,本文分析基于模糊控制的PID控制算法,以求持续提高四旋翼飞行器的控制效果。
标签:四旋翼飞行器;动力学模型;模糊控制;PID控制四旋翼飞行器由于其独特的飞行方式使得其起飞和降落需要较少的空间,便于保持在较高的操纵性能飞行在障碍物密集的环境当中,同时四旋翼飞行器可以保持稳定的飞行姿态,因此在军事和民用领域都有较好的应用前景。
四旋翼飞行器具有简单的机械结构,其主要由十字状构架和四个旋翼组成,在对四旋翼飞行器数学建模时其属于强耦合、非线性及欠驱动六自由度系统,通过控制四个螺旋桨不同速度就可是实现不同的飞行姿态。
对于非线性强耦合的系统的控制较为困难,因此要实现四旋翼飞行器从初始位置运行到既定位置并能保持当前的运动状态,就可以将非线性的四旋翼飞行器模型进行近似线性化的处理。
在四旋翼飞行器控制过程中可以采用双闭环结构,将内环角度环输出作为外环速度环的控制输入,从而实现对四旋翼飞行器运行姿态的控制。
1 四旋翼飞行器的控制原理1.1 四旋翼飞行器的垂直飞行与俯仰飞行的控制原理四旋翼飞行器在控制过程中通过调整电机转动速度来改变合力实现飞行的多种姿态。
在四旋翼飞行器垂直飞行过程中,首先需要处理好电机转动过程中产生的反转矩作用,在1号与3号电机逆时针运行的同时2号与4号电机顺时针旋转,当两者产生的合力能保持大小一致时,就会使他们产生的反扭矩互相完全抵消。
當各电机均产生向上拉力且拉力大于飞行器重力时就会使四旋翼飞行器上升,同时电机转动速度增加会使拉力变大,当拉力大于飞行器重力时就可以实现悬停状态,为了保证四旋翼飞行器可以实现垂直飞行,就需要四个电机的转动速度相同。
当四旋翼飞行器需要产生俯仰飞行时,可令2号和4号电机朝同一个方向旋转并保持相同的旋转速度,1号电机运行速度增加,3号电机运行速度降低,则会使四旋翼飞行器向X轴方向产生俯仰并进入不平衡状态。
基于STM32的四旋翼飞行控制系统毕业设计
例如在高空电力线巡检中,无人机能在工作人员的操控下进行工作,可以代替人工对巡检对象实施接近检测,减少工人的劳动强度。也可以携带传感仪器、摄像机等,对巡检对象进行数据收集、分析与存储,这进一步提高巡检的工作效率和巡检精度。在军事上,在局部小规模对战的时候,一些普通的侦察机,可能受到敌方打击而造成不必要的机体人员伤亡,无人机则可以很好地起到替代作用。利用四旋翼飞行器作为侦察机,具有振动小、噪声小、可靠性高、成本低、反侦察能力强、自我销毁等优势。因此无人机的军事价值不可估量。四旋翼飞行器还有着更为广阔的前景等待着开发。比如可以通过为飞行器的添加更加智能的算法实现人机互动,让飞行器帮人取物件等。
1
6
mV
电源模块的原理图如图4.1所示。图里的5V电源来源于电子调速器的BEC降压系统。
图4.1电源模块电路图
4.1.2STM32F407最小系统
STM32F407VET6是意法半导体基于CORTEX-M4内核的芯片,STM32F407拥有的资源包括:集成FPU和DSP指令,并具有192KBSRAM、1024KB FLASH、12个16位定时器、2个32位定时器、2个DMA控制器(共16个通道)、3个SPI、2个全双工I2S、3个IIC、6个串口、2个USB(支持HOST /SLAVE)、2个CAN、3个12位ADC、2个12位DAC、1个RTC(带日历功能)、1个SDIO接口、1个FSMC接口、1个10/100M以太网MAC控制器、1个摄像头接口、1个硬件随机数生成器、以及112个通用IO口等。该芯片的配置十分强悍,具有卓越的性能。相对STM32F1来说,许多功能进行了重大改进。STM32最小系统电路图如图4.2所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.2四旋翼飞行器的国内外研究现状
1.2.1 国外研究现状
目前,国内外对四旋翼飞行器的研究主要集中在3个方面:基于惯性导行系统的自主飞行控制、基于视觉功能的自主飞行控制和自主飞行器系统方案,典型代表有:瑞士洛桑联邦理工大学(EPFL)的OS4、宾夕法尼亚大学的HMX4。
OS4是EPFL自动化系统实验室开发的一种电动小型四旋翼飞行器,研究的重点是机构设计和自主导航算法,目标是实现室内和室外完全自主飞行。OS4I最大长度约73cm,质量为235g;它使用了DraganflyerⅢ的旋翼和机架,4个Faulhaber1724电机,以及一个Xsense的MT9-B微惯性器件。通过万向节将飞行器固定在飞行测试平台上,使其在三个方向都可以灵活运动,便于调试。飞行器的能源供给、数据处理、电机驱动以及飞行控制都由外部提供。OS4已经基于PID、LQ、Backstepping及Sliding-mode等多种控制算法实现了飞行器姿态控制。
Keywords:Quad-rotor,STM32F103,MPU6050,Attitude calculation,PID controller
第一章 四旋翼飞行器概述
1.1引言
目前国内外对飞行器的研究主要包括三种:固定翼、旋翼及扑翼式,四旋翼飞行器在布局形式上属于旋翼式的一种。国外早在上世纪初期就开始研究四旋翼飞行器。这种飞行器由军方率先研发并制造用于情报侦查等领域。很多科技企业、大学及研究所也研发并实现了自己的四旋翼飞行器。
2012年2月,由美国种子基金会(The Sapling Foundation)运营的非盈利组织TED大会请出了美国宾夕法尼亚大学(University Of Pennsylvania)动力科学院(School of Engineering and Applied Science)的一位教授和他所带领的一个四旋翼飞行器研发团队,他们陈述了目前一些无人机的不足之处和四旋翼飞行器的优越性,并多元化展示了他们研发的四旋翼飞行器在军事,勘探等多种行业的多种用途。
本科毕业设计(论文)资料
题目名称:
四旋翼飞行器PID控制器的设计
摘 要
近年来,随着新材料的涌现及新传感技术的发展,四旋翼飞行器迅速发展起来。四旋翼飞行器是一种具有四个对称旋翼的直升机,结构简单,机动性强,飞行灵活,可垂直起降,悬停甚至完成一些高难度飞行动作。它所具备的优越性能,使其应l introducea scheme to make a quad-rotor. The design used STM32F103C8T6 which worked with the new-fashioned ARM Cortex-M3 micro processer as the control unit. In addition, a chip named MPU6050 was used to measure the attitude data of the quad-rotor,and the wireless communication module named NRF24L01 to make the PC and the quad-rotor communicate well. Besides, aWFLY07remote was used to control the quad-rotor.We stated the flight theory, and the structure of the hardware and software in detailimportantly,a PID controllerwasdesigned to control the attitude and made it really worked.
事实上,很多无人机都需要专业的飞行控制团队进行远程操控,包括几个专业的飞行员,远程雷达感应操作员和团队协调员。除此之外,这些无人机在自身结构、体积、重量及成本等方面都有缺点。而四旋翼飞行器结构简单,体积小巧,重量轻便,机动性强,飞行灵活,可垂直起降,悬停甚至完成一些高难度飞行动作。这些优势使四旋翼飞行器迅速成为无人机领域冉冉升起的新星,也让人看到了它的研发价值和应用前景。很多行业如军事打击、公安追捕、灾害搜救、农林业调查、输电线巡查、航拍等都成为四旋翼飞行器体现其优越性的平台。
关键词:四旋翼飞行器,STM32F103,MPU6050,姿态解算,PID控制器
ABSTRACT
In recent years, with the new materialand newMEMStechnology, the quad-rotor obtains a rapid development .And that made it become a popular flight model among many model aircraft enthusiasts.Quad-rotoris a kind of symmetry withthe advantages of simple structure, strong flexibility,It cantake off and landvertically,In addition, it can alsohoverin the airand evendosome difficult maneuver. Its superior performance has the very broad application prospects.