基于相关系数法分区影像匹配的研究
相关系数法影像匹配
相关系数法影像匹配嘿,朋友!今天咱们来聊聊“相关系数法影像匹配”这听起来有点高深的玩意儿。
你想啊,咱们平时看照片,一眼就能认出熟悉的人或景。
那相关系数法影像匹配呢,就像是个特别厉害的“智能眼睛”,能在一堆影像里找到相似的部分,把它们精准地对上号。
比如说,你有两张差不多角度拍的城市风景照,这相关系数法就能找出那些相同的建筑、街道啥的。
这是不是很神奇?就好像有个超级聪明的小精灵在影像的世界里帮忙找“双胞胎”。
相关系数法影像匹配是咋做到的呢?它会把影像里的一个个小部分拿出来,比一比它们的特征,像是颜色啦、形状啦、纹理啦等等。
然后算一算它们之间的相似程度,就像咱们给不同的东西打分一样。
相似程度越高,得分就越高,就说明这两个部分越有可能是匹配的。
这过程可不简单,就跟咱们在一堆拼图里找能拼在一起的小块儿似的。
要是影像很复杂,那可真是个大工程。
但别担心,相关系数法可是很有耐心的,它不会被难倒。
再比如说,你拍了一系列同一个地方不同时间的照片,想看看有啥变化。
相关系数法就能帮你找出那些一直没变的部分,还有那些新出现或者消失的部分。
这多有用啊,简直就是个影像世界的“侦探”!那在实际应用中,相关系数法影像匹配可厉害着呢。
像地图绘制,它能把不同时间、不同角度拍的地图影像准确地匹配起来,让地图更精确、更完整。
还有医学领域,给身体拍的片子,也能靠它来对比分析,帮助医生发现病变的部位有没有变化。
在天文研究里,观察星星、星系的影像,也少不了相关系数法影像匹配的帮忙。
它能让科学家们更清楚地了解天体的运动和变化。
所以说,相关系数法影像匹配可不是什么遥不可及的高科技,而是实实在在能为咱们的生活和各种研究带来帮助的好东西。
它就像一把神奇的钥匙,能打开影像世界里隐藏的秘密之门。
怎么样,你是不是也对它刮目相看啦?我觉得啊,相关系数法影像匹配在未来还会有更多更厉害的应用,给咱们带来更多的惊喜和便利。
让咱们一起期待吧!。
基于相位相关的图像匹配算法研究

基于相位相关的图像匹配算法研究胡海;罗桂娥【摘要】提出一种基于相位相关的图像匹配方法.针对仅有位移变换的图像,给出基于相位相关的模板匹配方法,并进行了改进,然后利用人工平移的方式进行实验验证.结合Fourier-Mellin变换理论,给出解决旋转问题的图像匹配方法,并利用人工旋转的方式进行了实验验证.实验结果表明,本方法在精度和速度上都能取得比较满意的效果.【期刊名称】《微型机与应用》【年(卷),期】2013(032)007【总页数】3页(P5-7)【关键词】相位相关;傅里叶-梅林变换;模板匹配【作者】胡海;罗桂娥【作者单位】中南大学信息科学与工程学院,湖南长沙410083;中南大学信息科学与工程学院,湖南长沙410083【正文语种】中文【中图分类】TP391图像匹配是评价两幅或多幅图像的相似性以确定同名点的过程。
图像匹配算法就是设法建立两幅图像之间的对应关系,确定相应几何变换参数,对两幅图像中的一幅进行几何变换的方法。
图像匹配是图像分析和处理过程中的基本问题。
它在航空影像自动制图、图像三维重构、计算机视觉、遥感融合、模式识别、医学图像处理、影像分析等领域都有十分重要的应用。
目前图像匹配算法分为基于图像特征和基于图像灰度两大类。
在诸多现有的图像匹配算法中,基于相位相关的方法以其计算量小、抗噪声等优点得到广泛关注。
本文提出的基于相位相关的模板匹配方法不但有很高的匹配精度而且能精确地测量出相对图像对之间的相对平移量,但它对旋转变换很敏感。
为了能够准确实现图像匹配,本文结合Fourier-Mellin变换求取图像的旋转量,并对图像进行匹配[1-5]。
1 Fourier变换位移理论基于频域傅里叶变换相位相关法描述如下:f1(x,y),f2(x,y)是定义在空间 R2的两幅图像,假定f1(x,y)是参考图像,图像 f2(x,y)是 f1(x,y)平移(x0,y0)后的观测图像,两者之间的关系可表示为:根据傅里叶变换的性质有:则两幅图像的互功率谱为:式中,F(ξ,η)为 F1(ξ,η)的复共轭。
相关系数与最小二乘影像匹配算法的研究
g 一
。
J
对 于 一 维 相 关 , ̄ 0 若 在 右 影 像 各 搜 索 窗 口 中 r- 。 -
由 上 式 求 出 的相 关 系 数 的 最 大 值 大 于 阈值 , 认 为 则 该搜 索窗 口的中心像 素即为 匹配点 。 实 际计算 时 , 在 为 简 化 计 算 量 , 以 采 用 以下 公 式 : 可
素 作 为 提 取 的 同名 点 。相 关 系 数 是 标 准 化 的 协 方 差 函数 , 的值 等于 两影 像 间 的协 方 差 函数 与两 影像 它 各 自 方 差 的 比 值 。 若 左 影 像 目标 窗 口 中 心 像 素 的 坐 标 为 ( ,) 右 影 像 搜 索 窗 口 的 中 心 像 素 坐 标 为 (+ ij, i rj c , 计 算 此 两 窗 口 间 相 关 系 数 的 具 体 公 式 如 ,+ ) 则
影 像 匹 配 的 方 法 可 以较 高 精 度 的 自动 提 取 两 张 或 多 张 影 像 上 的 同 名 点 , 化 人 2 作 业 量 , 短 作 业 时 简 1 2 缩
间 。 像 匹 配 还 可 以 用 于 重 建 景 物 的 三 维 影 像 、 器 影 机
影 像 中一 定 大 小 的 像 素 窗 口 间 的 相 似 性 , 取 相 关 选 系 数 最 大 且 大 于 设 定 阈值 的 一 对 像 素 窗 口的 中 心 像
影 像 匹 配 就 是 通 过 一 种 相 似 性 测 度 在 两 张 或 多
张 影 像 上 识 别 出 同 名 地 物 点 , 摄 影 测 量 方 面 利 用 在
以 两 张 影 像 间 的 影 像 匹 配 为 例 , 关 系 数 算 法 相 就 是 以相 关 系 数 作 为 匹 配 测 度 , 一 判 断 左 右 两 张 逐
本文基于相关性分析来实现图像匹配.
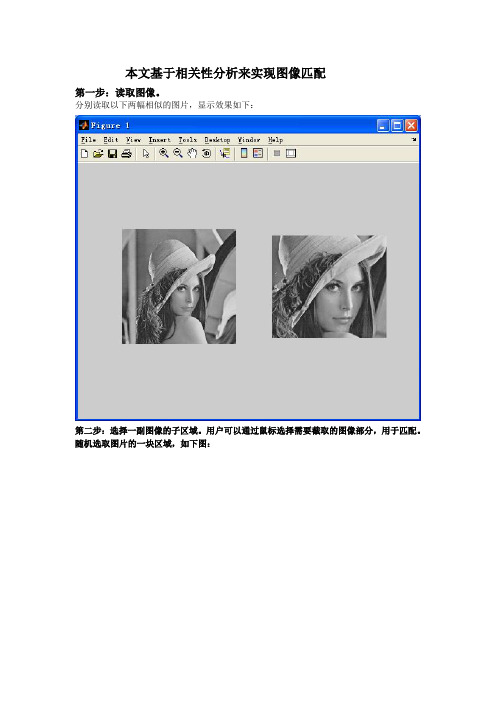
本文基于相关性分析来实现图像匹配第一步:读取图像。
分别读取以下两幅相似的图片,显示效果如下:第二步:选择一副图像的子区域。
用户可以通过鼠标选择需要截取的图像部分,用于匹配。
随机选取图片的一块区域,如下图:第三步:使用相关性分析两幅图像采用协方差的方式计算相关系数,分析图片的相似性。
1.协方差与相关系数的概念对于二维随机变量(,)X Y ,除了关心它的各个分量的数学期望和方差外,还需要知道这两个分量之间的相互关系,这种关系无法从各个分量的期望和方差来说明,这就需要引进描述这两个分量之间相互关系的数字特征——协方差及相关系数。
若X Y 与相互独立,则()()0Y E X EX Y EY σ--⎡⎤⎣⎦=≠;若()()0E X EX Y EY --≠⎡⎤⎣⎦,则表示X 与Y 不独立,X 与Y 之间存在着一定的关系设 (,)X Y 是二维随机变量, 则称()()E X EX Y EY --⎡⎤⎣⎦为X 与Y 的协方差(Covariance ),记为 ()cov ,X Y 或XY σ,即()()()cov ,XY X Y E X EX Y EY σ==--⎡⎤⎣⎦若0X σ=≠且0Y σ=≠,则称XY XY X Y σρσσ== 为X 与Y 的相关系数(Correlation Coefficient )。
()c o v ,X Y 是有量纲的量,而XY ρ则是无量纲的量.协方差常用下列公式计算()()=-⋅cov,X Y E XY EX EY2.用全搜索和协方差计算截取图片与另外一幅图片的各点的相似度。
c=normxcorr2(sub_I1(:,:,1),I2(:,:,1));第四步:找到整幅图像的偏移。
[max_c,imax]=max(abs(c(:)));[ypeak,xpeak]=ind2sub(size(c),imax(1));[m,n]=size(sub_I1);xbegin=xpeak-n+1;ybegin=ypeak-m+1;xend=xpeak;yend=ypeak;从原图像提取匹配到的图像extracted_I1=I2(ybegin:yend,xbegin:xend,:);第五步:显示匹配结果。
基于普通数码像片的相关系数影像匹配方法探讨
设 搜 索 区域 为 正 方形 A C 边 长 为 L个像 B D, 元, 四个 顶 点 的 相关 系数 值 为 P ' P ,。 四个 AP ,cP ,
顶 点 的像 片 坐 标 为 A( , ,, ( , )C I,c, I J )BI J , ( J) a a b b c D I , )如 图 1 ( J , d d 所示 。 中 E、 、 H 为 A D 图 F G、 B、 C、
相 关 系数 满 足 ( ,) 1 在 [ 1 1 绝 对 尺 crI , 一 ,] 度 范 围之 间衡量 两者 之 问的相 似性 。相关 系数刻
划 了两 者之 间 的 近似 程 度 的线 性 描 述 。一 般 来 说 , ( ,) 接 近 1 两 者越 近 似 的有 线 性 关 系 。 P cr越 ,
相关 系数 值 都 比较 小 。() 4 相关 系数 的值 , 于一 介 1
和+ 之 问 , 个 值 反 映 了两 者 的相 似 程 度 , 以 1 这 可
[ 稿 日期 】 2 0 - 2 1 收 0 6 1— 9
【 作者简介] 杨立君 , ,1 7 一 , 男 ( 9 7 )黑龙江七 台河人 , 南京邮电大学计算 机学 院助教 。
[ 关键词 ] 数 字摄影测量
普通数码相机
相 关系数 匹配
[ 中图分类号 ]P 0 24
[ 文献标识码 ]B
[ 文章编号 ] 10 — 0 0 2 0 )2 4 0 7 30 (0 7 0 -
目前 数 码 相 机 广 泛 应 用 于 近 景 摄 影 测 量 领
m ̄ ( n 目标 窗 口的像 元 总数 ) 。若 pc r p 。 阈 f, > 为 J
值 )则 , 就是 匹 配点 。 , r
相关系数和最小二乘法的影像匹配
相关系数和最小二乘法的影像匹配作者:周天来源:《中国科技博览》2015年第07期[摘要]影像匹配是利用函数算法在两幅影像间识别同名点。
影像匹配有很多基本算法,其中相关系数算法是通过相关系数作为相似性测度的灰度匹配,速度较快也比较成熟。
相关系数得到的匹配是像素级。
为了使匹配更加精确采用最小二乘法影像来提高匹配的精度和可靠性,达到子像素级。
文章介绍了相关系数影像匹配和最小二乘法影像匹配的原理、算法的设计与实现,并采用核线影像对作为数据源,先用点特征提取算法提取特征点,然后用相关系数法进行初匹配,最后用最小二乘法提高精度,得到了最后结果。
[关键词]影像匹配点特征提取相关系数最小二乘法中图分类号:S125 文献标识码:A 文章编号:1009-914X(2015)07-0396-01引言随着科学技术的迅猛发展,影像匹配已成为现代信息处理,特别是图像信息处理领域中的一项非常重要的技术,并在计算机视觉、数字摄影测量、遥感图像处理、资源分析、医学图像配准、肖像和指纹识别、光学和雷达跟踪、飞行器巡航制导、导弹地形匹配及投射系统的导航目标制导等领域得到了广泛的应用。
影像匹配实质上是在两幅或多幅影像上识别同名点的过程,同名点的确定是以匹配测度为基础的。
目前,影像匹配的算法主要分为基于灰度的匹配和基于特征的匹配。
同名点的确定是以匹配测度为基础的,其中相关系数就是测度中的一种。
相关系数法是一种基于灰度的匹配。
这种方法基于统计理论,对像点进行灰度检测,并利用一定的算法进行相似性度量,即计算相关系数。
相关系数是标准化的协方差函数,即协方差除以两信号的方差得到。
当相关系数最大时,就认为是同名像点。
最小二乘法在影像匹配中的应用是 20 世纪 80 年代发展起来的,该方法充分利用了影像窗口内的信息进行平差计算,使影像匹配可以达到 1/10 甚至 1/100 像素的高精度,即影像匹配精度可达到子像素等级。
为此,最小二乘影像匹配被称为“高精度影像匹配”,它不仅仅可以被用于一般的产生数字地面模型,生产正射影像图,而且可以用于控制点的加密(空中三角测量)及工业上的高精度量测。
基于相关性的遥感图像融合方法研究

Research and Exploration |研究与探索.生产与管理基于相关性的遥感图像融合方法研究丁宏毅,周致迎,李开端(海军航空工程学院青岛校区,山东青岛266041 )摘要:本文提出了一种基于影像相关性的遥感图像融合方法。
实验结果分析表明,与任意选取波段影像进行融合相比, 有选择性地选取波段组合可以减少冗余数据,提高图像融合质量和增强图像解译能力。
关键词:互相关;自相关;图像融合中图分类号:TP751 文献标识码:A文章编号:1671-0711 (2017) 02 (下)-0024-02相关技术是近年来发展起来的一种测试与分析技术,在遥感图像处理领域有着广泛的应用。
随着 遥感传感器的波段数不断增加和光谱分辨率逐渐提高,传感器的分辨率和信噪比也得到了提高,但图 像获取时像元间经常存在一些扰动,在空间域像元间或光谱维波段间都可能相互影响,这是由遥感图像的相关特性导致的。
这种现象虽然对遥感图像的处理和分析不利,但是可以通过分析遥感图像的相关特征,优化融合方法,来尽可能减少噪声,从而提高图像质量。
本文实验研究采用IK O N O S影像,IK O N O S是世界上第一颗高分辨率商用卫星,它同 时提供具有lm空间分辨率的全色影像和具有4m空 间分辨率的多光谱影像。
在对卫星遥感图像的实际应用中,经常需要对多波段图像进行比较和分析,利用相关性分析和计算影像信息,通过分析各波段影像相关性,选择最佳融合方法,从而减少影像的相关性,提高图像解译能力。
1影像相关原理1.1影像相关碰字图像处理中,影像匹配又称为立体匹配,目的是在立体像对上自动确定同名像点,从而代替传统的人工双眼观测。
影像匹配实质上是在两幅(或 多幅)图像之间识别同名点,它是计算机视觉及遥感 数字图像制图的核心问题。
由于早期的研究一般使用 相关技术解决影像匹配问题,所以影像匹配常常被称 为影像相关。
影像相关就是利用两个影像信号的相关 函数评价它们之间的相似性以确定同名点的过程。
基于相关系数的影像高速匹配
基于相关系数的影像高速匹配作者:夏远鑫梁亚舟来源:《中国新通信》2012年第14期1引言目前,全世界越来越开始关注遥感影像的应用,在军、事、气象、环境监测等诸多方面世界各国都投入了大量的人力、物力、财力。
而影像匹配在该技术的地位正逐步攀高,各国技术人员投入了大量的精力用于研究快速、高效的匹配算法,各类算法可说是层出不穷。
其中有代表性的包括基于图像灰度的相关算法、基于图像特征的算法、人工智能影像匹配法(包括基于神经网络、遗传算法等方法)[1]。
在图像特征提取相关算法中,基于movavec算子的特征提取方法是最快的。
而在影像匹配相关算法里,基于图像灰度的算法准确度最高,虽然相应计算量很大,对灰度变化、旋转、形变以及遮挡等比较敏感,在适应性上要差于基于图像特征的算法,但在精度上基于图像灰度的算法却明显高于后者。
而基于人工智能的影像匹配算法又刚刚兴起,不够成熟[2]。
鉴于以上因素,笔者选择了基于moravec算子进行影像特征提取并利用影像灰度计算特征点间的相关系数进而匹配影像的方法。
考虑到工作量的影响,对相关系数计算公式进行了适当的简化,在保证一定匹配精度情况下,尽可能地提高匹配速度。
2匹配基本原理介绍2.1moravec算子特征提取计算以像素(x,y)为中心四个主要方向(0°、45°、90°、135°)相邻像素灰度差的平方和,取其中最小者作为该像素兴趣值,同时给定一经验阈值,将兴趣值大于阈值的点(即兴趣值计算窗口的中心点)作为候选点,选取候选点中兴趣值最大的作为特征点[3]。
2.2基于相关系数影像匹配[3]假设进行匹配计算的窗口大小为m×n,以Lx,y表示参考图像中以(x,y)为中心点的窗口内的灰度分布(离散的),Rx,y则为目标图像对应窗口内的灰度分布(对应窗口通过估计特征点在右片的同名点可能存在的范围确定)。
两窗口相关系数的计算公式定义为:籽x,y=σ(Lx,y,Rx,y)/DLx,y×DRx,y姨3解求相关系数方法改进实际运算中,由于每次兴趣窗口只在行向或列向移动一个像素大小的距离,因而相邻的窗口相关系数值有很相似的成分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-
1 m·n
(
mn
∑∑g
i = 1j = 1
i,j )
(
mn
∑∑g'
i = 1j = 1
i
+
r,j +
c
)
槡[ ] [ ] m n i∑= 1j∑= 1g2i,j
-
1 m·n
(
mn
∑∑g
i = 1j = 1
i,j )
2
mn
i∑= 1j∑= 1g'2i + r,j + c
-
1 m·n
(
mn
∑∑g'
i = 1j = 1
右影像灰度函数为 g'( x,y) ,搜索窗口中心像素为( i +
r,j + c) ,则两窗口间相关系数的值为:
mn
ρ( c,r) =
∑∑(
i = 1j = 1
gi,j
- 珔g) (
g'i + r,j + c
- 珔g')
mn
mn
槡∑∑( i = 1j = 1
gi,j
- 珔g) 2·∑∑( i = 1j = 1
1前言
影像匹配实质上是在两幅或多幅影像上识别同名 点的过程,同名点的确定是以匹配测度为基础的。目 前,影像匹配的算法主要分为基于灰度的匹配和基于 特征的匹配。相关系数法是一种基于灰度的匹配[1], 它还可 作 为 其 他 匹 配 如 最 小 二 乘 法 等 算 法 的 初 匹 配[2]。这种方法基于统计理论,对像点进行灰度检测, 并利用一定的算法进行相似性度量,即计算相关系数。 当相关系数最大时,就认为是同名像点。采用核线影 像作为数据源时,这种方法计算量更小,简单易行,且 其匹配精度可达到一个像素。但是,相关系数法影像 匹配常采用整体影像匹配方式,匹配精度容易受到两 幅( 或多幅) 影像灰度及纹理不一致的影响,笔者在试 验的基础上,采用分区影像匹配的方式,提高了相关系 数法影像匹配的精度。
* 收稿日期: 2012—05—09 作者简介: 周惠慧( 1991—) ,女,大学本科学生,专业: 遥感信息工程学院摄影测量与遥感方向。
62
但数量还是较多,如图 1 所示。
城市勘测
2012 年 12 月
若目标区小,搜索区大,会出现很大的粗差。为了获得 较高的精度,应选择小的目标区与搜索区[7]。
( 5) 特征点分布较密集的区域,一些同名点受到 相关系数更大的同名点的抑制,没有被提取出来。
图 1 不同灰度影像 Moravec 算子特征提取结果
再采用相关系数法对左右影像进行灰度匹配,如 图 2 所示。
图 2 相关系数法影像匹配同名点分布对比图
从图 1 的左右像片来看,左片的反差较大,纹理信 息更为丰富,右片的特征点应包含在左片的特征点之 内,理论上来说,采用相关系数影像匹配提取的同名点 数量与分布应该与右片的特征点基本一致。图 2 中左 片为图 1 中的右片,作为参照影像,右片为采用相关系 数法对图 1 中左右影像进行灰度匹配提取的同名点影 像。由图 2 可以看出,右像中大量特征点没有满足与 参照影像对应同名点相匹配的要求,最终满足要求成 为匹配点的点比参照影像本来的特征点数量要少得 多。比如,参照影像中房屋集中区域提取出了比较多 的特征点,但右像中得到的匹配点却很少,道路沿线及 山坡纹理信息丰富的一些特征明显的地区也没有满足 要求的点。经分析有如下原因:
2012 年 12 月 第6 期
城市勘测 Urban Geotechnical Investigation & Surveying
文章编号: 1672 - 8262( 2012) 06 - 61 - 03
中图分类号: P231. 1
Dec. 2012 No. 6
文献标识码: B
基于相关系数法分区影像匹配的研究
2 相关系数法的原理
相关系数是标准化的协方差函数,协方差函数除
以两信号的方差即得相关系数。相关系数法就是以相
关系数为匹配测度,判断左右影像中一定大小窗口中
像素的相似性,若相关系数符合一定的判断条件,则窗 口内的中心像素被提取为一对同名点[3]。若左影像的
灰度函数为 g( x,y) ,目标窗口中心像素坐标为( i,j) ,
i
+
r,j +
c
)
2
当选取窗口的相关系数最大且大于设定的阈值, 则搜索区窗口的中心像素为求得的同名点。对于一维 相关,r≡0。
相关系数是灰度线性变换的不变量,因此,采用相 关系数法可以克服影像线性畸变的影响。
3 算法的设计与实现
在核线影像上,只需进行一维搜索。只需在目标 点所在核线的同名核线上逐像素计算。但是,若目标 区太长,灰度信号的重心与几何重心并不重合,且影像 存在几何变形,就会产生相关误差。因此一维相关目 标区的选取实际上与二维相同,一般情况下,搜索区为
( 1) 算法的结果与相关系数的阈值选择有关[5], 右像亮度较大,地物起伏不明显区域内像素的相关系 数的值整体偏低。而阈值越高,则所得同名点越少,正 确率也越高。但若降低阈值,则只在局部范围内同名 点的数量有增加,难以做到整幅影像均匀分布;
g'i + r,j + c
- 珔g'r,c )
2
式中:
珔 g;
i = 1j = 1
i
+
r,j +
c
;
珔 g =
1 m·n
mn
i∑= 1j∑= 1gi,j
考虑到计算量,相关系数的实用公式为:
ρ( c,r) =
mn
∑∑(
i = 1j = 1
gi,j ·g' i + r,j + c )
右像核线及其上下一到两行像素的灰度阵列。 本试验先在像对中分别利用 Moravec 算子提取一
定数量特征点,然后逐对计算位于同名核线上特征点 的相关系数。具体实现时,目标区和搜索区的每个窗 口平均灰度只需计算一次[4]。这两项措施可以减少计 算量,提高运行速度。
4 结果分析
为了说明问题,对左右影像的灰度和纹理差进行 了调整,使右片的灰度质量和纹理清晰度明显低于左 片,利用 Moravec 算子提取出左右影像的特征点( 红色 为特征点,以下同) ,可见右片的特征点明显少于左片,
周惠慧*
( 武汉大学遥感信息工程学院,湖北 武汉 430079) 摘 要: 基于相关系数的灰度匹配是以相关系数作为相似性测度的灰度匹配。相关系数匹配是众多匹配方法中最简 单,速度最快也是最成熟的方法。本文介绍了相关系数影像匹配方法的原理、算法的设计与实现,利用核线影像对作 为数据源,进行了影像匹配试验,提出了简单易行的分区匹配方法,并进行了比较分析,得出了有益的结论。 关键词: 影像匹配; 相关系数法; 同名点; 同名核线; 分区匹配