周期性机械振动主动控制算法
机械振动控制的自适应与优化算法
机械振动控制的自适应与优化算法机械振动控制是控制工程中的一项重要内容,在很多领域都有着广泛的应用。
机械振动会导致机械系统的破坏和能源的浪费,因此,研究机械振动控制的自适应与优化算法具有重要的意义。
自适应控制算法是一种能够根据控制系统自身的性能指标和环境变化来调整控制策略的方法。
自适应控制算法主要有模型参考自适应控制、直接自适应控制和稳态自适应控制等。
其中,模型参考自适应控制是一种常用的方法,它通过建立参考模型与被控对象的模型之间的误差来进行控制调节。
该算法能够根据误差的大小调整控制器的参数,从而实现对机械振动的控制。
优化算法是一种通过寻找最优解来改进系统性能的方法。
常见的优化算法有遗传算法、粒子群优化算法、蚁群算法等。
这些算法通过模拟生物进化、粒子行为等寻找最优解的过程,可以应用于机械振动控制的参数优化中。
通过调整控制器的参数,优化算法能够找到最佳的控制策略,从而有效地抑制机械振动。
自适应与优化算法在机械振动控制中的应用主要包括参数估计、模型更新和控制器设计三个方面。
首先,参数估计是机械振动控制中的重要环节,它能够通过观测反馈信号和控制输入信号来估计被控对象的参数。
自适应算法通过不断调整参数估计的误差,优化算法通过寻找最佳解来提高参数估计的准确性,从而实现对机械振动的准确控制。
其次,模型更新是机械振动控制中的另一个关键环节。
模型通常用来描述被控对象的物理特性,对于复杂的机械系统来说,模型的正确性对控制效果至关重要。
自适应算法能够通过不断调整模型参数来提高模型的准确度,优化算法则能够通过寻找最优解来优化模型。
通过自适应与优化算法的联合应用,可以实现对机械振动控制中模型更新的自适应优化。
最后,控制器设计是机械振动控制中的核心问题。
自适应算法能够实现对控制器参数的自适应调整,优化算法能够通过寻找最佳解来优化控制器的性能。
通过自适应与优化算法的联合应用,可以实现对机械振动控制中控制器设计的自适应优化。
总之,机械振动控制的自适应与优化算法是一项重要的研究内容,能够有效地抑制机械振动,提高系统的性能。
机械结构的振动分析与控制
机械结构的振动分析与控制引言:机械工程是一门涉及设计、制造和运用机械的学科,它在现代工业中扮演着至关重要的角色。
机械结构的振动分析与控制是机械工程中的一个重要研究领域,它关注机械结构在运行过程中的振动特性,以及如何通过控制手段来减小和控制这些振动,提高机械系统的稳定性和可靠性。
本文将深入探讨机械结构的振动分析与控制的相关理论和方法。
1. 振动分析的基本原理机械结构的振动是指在机械系统运行过程中,由于外界激励或内部失稳等因素引起的结构的周期性运动。
振动分析的基本原理是通过建立机械系统的数学模型,利用振动力学理论和方法,计算和预测机械结构的振动特性,包括振动频率、振动模态和振动幅值等。
常用的振动分析方法包括模态分析、频谱分析和时域分析等。
2. 振动控制的方法振动控制是指通过采取措施减小和控制机械结构的振动,以提高机械系统的性能和可靠性。
常见的振动控制方法有被动控制和主动控制两种。
2.1 被动控制被动控制是指通过在机械结构中引入一些特定的材料、结构或装置,来改变机械结构的振动特性,从而减小和控制振动。
常见的被动控制手段包括质量阻尼器、弹簧减振器和隔振基础等。
这些措施可以通过改变机械结构的固有频率、增加结构的阻尼和减小振动能量传递等方式来实现振动的控制。
2.2 主动控制主动控制是指通过在机械结构中引入传感器、执行器和控制系统等设备,实时监测和控制机械结构的振动。
主动控制可以根据实时的振动信号和控制算法,通过调节控制系统中的激励力或阻尼器的特性,来实现对机械结构振动的主动控制。
主动控制具有实时性和高精度的优势,可以有效地减小和控制机械结构的振动。
3. 振动分析与控制的应用领域振动分析与控制在机械工程中有着广泛的应用。
在航空航天领域,振动分析与控制可以用于飞机和航天器的结构设计和优化,以提高其飞行性能和结构的可靠性。
在汽车工程领域,振动分析与控制可以用于汽车底盘和车身结构的设计和优化,以提高车辆的乘坐舒适性和行驶稳定性。
机械设计中的振动分析与控制技术

机械设计中的振动分析与控制技术在现代机械工程领域,机械设计的质量和性能直接关系到设备的可靠性、安全性以及工作效率。
而振动问题作为机械系统中常见的现象之一,对机械的正常运行和使用寿命有着重要影响。
因此,深入研究机械设计中的振动分析与控制技术具有重要的现实意义。
振动是指物体在平衡位置附近做往复运动的现象。
在机械系统中,振动的产生通常是由于旋转部件的不平衡、零部件之间的连接松动、外力的周期性作用等原因引起的。
振动不仅会产生噪声,影响工作环境和操作人员的身心健康,还可能导致机械零部件的疲劳损坏,降低设备的精度和可靠性,甚至引发严重的安全事故。
为了有效地解决机械设计中的振动问题,首先需要进行振动分析。
振动分析的目的是了解机械系统的振动特性,包括振动频率、振幅、相位等,从而找出振动的根源和传递路径。
目前,常用的振动分析方法主要有理论分析、实验测试和数值模拟三种。
理论分析是通过建立机械系统的数学模型,运用力学原理和数学方法求解系统的振动方程,从而得到振动特性的解析解。
这种方法具有较高的精度,但对于复杂的机械系统,建立精确的数学模型往往比较困难。
实验测试则是通过在实际机械系统上安装传感器,测量振动信号,然后对测量数据进行处理和分析,得到振动特性。
实验测试能够直接反映机械系统的真实振动情况,但需要投入一定的设备和人力成本,而且测试结果可能受到环境因素的干扰。
数值模拟是利用计算机软件建立机械系统的虚拟模型,通过数值计算求解振动方程,得到振动特性的近似解。
数值模拟具有成本低、效率高、能够模拟复杂工况等优点,在机械设计中的应用越来越广泛。
在完成振动分析之后,就需要采取相应的控制技术来抑制振动。
常见的振动控制技术主要包括被动控制、主动控制和半主动控制三种。
被动控制是通过在机械系统中添加阻尼器、弹簧等被动元件来消耗或转移振动能量,从而达到减振的目的。
这种方法简单可靠,成本较低,但控制效果有限,难以适应复杂的振动工况。
主动控制则是通过在机械系统中安装传感器和作动器,实时监测振动信号,并根据控制算法向作动器发送控制指令,产生反向作用力来抵消振动。
机械振动控制中的主动与半主动阻尼
机械振动控制中的主动与半主动阻尼振动控制在机械系统中具有重要的应用,可以提高系统的稳定性、减小振动幅值,同时延长系统的寿命。
在振动控制中,主动阻尼和半主动阻尼是两种常用的控制策略。
本文将分别介绍主动和半主动阻尼的原理和应用。
主动阻尼是通过主动干预机械系统,实时改变系统的动力参数来实现的。
其中最常见的一种方法是通过电机或电磁力来施加力矩或阻尼力。
主动阻尼可以根据振动输入和输出信号之间的关系,实现实时调节。
例如,在风力发电机组中,由于风速的变化,风力机组的振动会发生变化。
通过监测风速和振动信号,可以实时调整发电机组的转速,以减小振动幅值,提高系统的稳定性。
主动阻尼在许多领域都有着广泛的应用。
在汽车悬架系统中,可以通过主动控制阻尼器的刚度和阻尼特性,实现对车身的主动控制,进而提高驾驶的舒适性和安全性。
在建筑结构中,可以通过控制主动阻尼器的阻尼力,减小结构的振动幅值,增加结构的稳定性。
与主动阻尼不同,半主动阻尼是通过改变材料的力学性能来实现的。
这种方法通常利用液体或磁性材料的特性,通过调节控制器的参数,改变阻尼材料的阻尼特性。
半主动阻尼可以根据系统的振动状态实时调整阻尼参数,从而改变系统的振动响应。
半主动阻尼在工程实践中有着广泛的应用。
在桥梁和建筑结构中,可以使用液体阻尼器或磁流变阻尼器来减小结构的振动幅值。
液体阻尼器通过调整液体的流动参数来实现阻尼效果,而磁流变阻尼器则通过改变磁场对磁流变材料的作用力来实现阻尼控制。
这些半主动阻尼器可以根据结构的振动情况实时调整其阻尼特性,从而减小结构的振动幅值。
在机械振动控制中,主动和半主动阻尼的选择取决于实际的应用需求和成本考虑。
主动阻尼通常需要较为复杂的控制系统和高成本的实施,但可以实现更为精准和实时的振动控制。
而半主动阻尼则相对简单和经济,但在某些情况下无法达到与主动阻尼相同的控制效果。
总之,机械振动控制中的主动和半主动阻尼是两种常用的控制策略。
主动阻尼通过实时调节系统的动力参数来减小振动幅值,提高系统的稳定性。
机械振动特性及控制方法
机械振动特性及控制方法机械振动是指机械系统受到外力或内部结构变化作用而发生的周期性或非周期性的运动。
在机械系统中,振动常常导致机械零件的损耗和破坏,造成安全事故,甚至影响机械系统性能。
因此,机械振动特性和控制方法成为机械工程和控制工程中的重要研究领域。
一、机械振动特性机械振动特性是描述机械系统振动运动的基本特性。
机械振动特性涵盖的内容包括机械振动的类型(自由振动和强迫振动)、振动频率、振动幅值、振动速度、振动加速度、振动相位等。
通过对机械系统振动特性的分析,可以深入了解机械系统的工作状态和性能。
二、机械振动的控制方法机械振动的控制方法是指通过对机械系统的结构、材料、传动等方面进行调整,或者通过对机械系统进行振动控制,来减少或消除机械振动的影响,保证机械系统的正常运转。
机械振动的控制方法主要包括结构控制、材料控制、传动控制、主动振动控制等。
1.结构控制结构控制是指对机械系统的结构进行改变,以消除或减小机械振动的影响。
结构控制的方法包括:增加机械系统的刚度、减少质量、调整机械系统的自然频率和阻尼比等。
这些措施能够消除或降低机械系统的振动响应,提高机械系统的工作效率和可靠性。
2.材料控制材料控制是指对机械系统使用的材料进行选择和改变,以减小或消除机械振动的影响。
材料控制的方法包括:选择高强度、高刚度、低密度、高阻尼材料等。
这些材料能够降低机械系统的振动响应和振动能量,提高机械系统的可靠性和寿命。
3.传动控制传动控制是指改变机械系统的传动方式和结构,以减小或消除机械振动的影响。
传动控制的方法包括:改变齿轮传动的齿数、改变机械系统的调整方式、引入弹性元件等。
这些方法能够有效地降低机械系统的振动响应和振动能量,提高机械系统的稳定性和可靠性。
4.主动振动控制主动振动控制是指通过对机械系统进行控制,使机械系统受到的振动力得到控制,并应用反馈控制来调整机械系统的振动状态。
主动振动控制的方法包括:使用机械动态控制器、使用电磁控制器、使用液压控制器等。
机械振动控制的工作原理
机械振动控制的工作原理机械振动控制是指通过各种控制手段和技术手段,减少或控制机械系统中的振动幅值,从而提高机械系统的运行效率、安全性和可靠性。
在日常生活和工业生产中,机械系统的振动现象普遍存在,并且会给人们带来不便和经济损失,因此,研究和应用机械振动控制技术具有重要意义。
一、机械振动的基本原理机械振动是指在机械系统中由于各种力的作用使得系统中某些部分产生周期性的振动。
机械振动的基本原理可以归结为以下几个方面:1. 弹簧质量系统的振动原理: 弹簧质量系统是机械振动研究中最基本的系统之一。
它由质量、弹簧和阻尼器组成,当质量受到外力作用时,会引起弹簧变形和阻尼器的耗散,从而产生振动。
2. 振动的能量转换原理: 机械振动是通过能量的转换来实现的。
在振动过程中,机械系统中的能量由一种形式转换为另一种形式,如机械能、势能、动能等。
通过合理地控制能量的转换,可以实现对振动的控制。
3. 系统固有频率的原理: 一个机械系统具有固有频率,即自由振动频率。
当外力频率与系统的固有频率相同时,系统会出现共振现象,振幅会大幅度增加。
因此,控制机械振动需要合理选择激励频率。
二、机械振动控制的方法机械振动控制的方法主要包括两类:被动控制和主动控制。
1. 被动控制:被动控制是指通过改变结构或添加控制器来控制振动。
常见的被动控制方法有减振器的使用、质量的改变、刚度的调节等。
通过设计合理的减振器或调节结构参数,可以降低系统的振动响应。
2. 主动控制:主动控制是指通过传感器和控制系统主动地对振动进行控制。
主动控制方法可以根据振动水平的监测结果,实时调整振动控制器的参数,实现对机械振动的控制。
常见的主动控制方法有电动机控制、液压控制和电磁控制等。
三、机械振动控制的关键技术机械振动控制的过程中需要借助一些关键技术来实现,以下是几个关键技术的介绍:1. 传感器技术: 传感器是实现振动控制的基础。
通过传感器来实时采集和监测振动信号,对系统的振动情况进行评估和分析,从而为控制措施的实施提供依据。
机械振动控制方法及其实验研究

机械振动控制方法及其实验研究机械振动是指机械装置在运行时所产生的不稳定运动,这种不稳定运动可能会导致机械失去平衡,进而损坏。
因此,振动控制是机械设计和运行中的重要问题之一。
振动控制方法通常包括两种基本策略:被动控制和主动控制。
被动控制主要是通过增加阻尼和增加结构刚度来抑制振动。
例如,设计一个弹簧降震器或加装减振器等。
这种方法相对来说简单易行,但是它需要对结构进行改进,增加了设计和实现难度。
主动控制是指在结构上加入一些控制力来抑制振动,让机械能够在稳定的状态下运行。
主动控制又可以分为开环控制和闭环控制两类。
开环控制就是以振动控制为目的主动施加控制力,而不需要通过传感器反馈。
闭环控制则需要在机械系统中加入各种传感器,并设计一个反馈控制系统来实现振动控制。
目前主动控制在机械振动控制中应用最为广泛,因为它不需要改变结构,只需要在原有机械的基础上增加一些控制器和传感器就可以了。
这种方法的主要优点是:可以通过控制器动态地调节控制力,因此具有更好的抑制振动的效果。
实验研究也证明了主动振动控制的有效性。
在一些实验中,已经成功地实现了通过控制器来抑制机械振动的目标。
例如,一些实验研究中,科学家制作了一个模型,通过在模型上设置传感器和控制器,实现了对模型的振动控制,结果表明,通过控制器控制的主动振动控制方法实现了较好的效果。
同时,在航空航天、机械制造等领域,科学家也广泛地利用主动振动控制方法来抑制机械振动。
总之,机械振动控制方法及其实验研究是一个重要的课题。
尽管被动控制在一些特殊情况下可以使用,但是主动振动控制方法更加灵活、有效。
随着科学技术的发展,这种方法会变得越来越普遍,同时也会提高机械设计的水平和机械运行的稳定性。
应用题技巧如何计算机械振动的周期与频率

应用题技巧如何计算机械振动的周期与频率计算机械振动的周期与频率是应用题中常见的问题之一。
通过正确的技巧和计算方法,我们可以准确地求解振动周期与频率的值。
为了计算机械振动的周期与频率,我们需要了解一些基本概念和公式。
首先,我们来介绍周期和频率的定义。
周期指的是振动一次所经过的时间,通常用字母T表示。
频率指的是单位时间内振动的次数,通常用字母f表示。
周期与频率有以下关系:频率 = 1 / 周期周期 = 1 / 频率下面,我们来介绍一些计算机械振动周期与频率的常见技巧。
1. 已知角速度ω的情况下,计算周期与频率:当已知角速度ω时,计算周期T和频率f的公式如下:T = 2π / ωf = ω / (2π)其中,π是一个常数,约等于3.14159。
2. 已知弹性势能常数k和质量m的情况下,计算周期与频率:当已知弹性势能常数k和质量m时,计算周期T和频率f的公式如下:T = 2π√(m / k)f = 1 / (2π)√(k / m)其中,√表示平方根运算。
3. 多个弹簧和质点的情况下,计算周期与频率:当系统中存在多个弹簧和质点时,可以使用以下公式计算振动的周期与频率:T = 2π√(m / k)f = 1 / (2π)√(k / m)其中,m表示系统的总质量,k表示系统的总弹性势能常数。
4. 摆锤的情况下,计算周期与频率:当存在摆锤时,计算周期T和频率f的公式如下:T = 2π√(L / g)f = 1 / (2π)√(g / L)其中,L表示摆锤的长度,g表示重力加速度。
通过以上的计算公式和技巧,我们可以根据具体的题目要求来选择合适的计算方法,准确地求解机械振动的周期和频率。
总结起来,计算机械振动周期与频率的技巧包括已知角速度的情况下计算、已知弹性势能常数和质量的情况下计算、多个弹簧和质点的情况下计算,以及摆锤的情况下计算。
根据具体的题目要求选择合适的公式和计算方法,可以准确地求解振动的周期和频率。
以上是关于计算机械振动周期与频率的应用题技巧的介绍和讨论。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3
主动悬置模型
主动悬置结构如图 5 所示 , 所采用的压电作动器 输出最大位移为 30 m 、 最大输出力为 11 kN, 为满足
498
机
械
强
度
2007 年
[ ( 0. 14 m g + m e ) s + 0. 14c b s + 0. 14 k b ] [ m a s + ( c a + cb ) s + k a + k b ] + 0. 14( c b s + k b ) C(S) = FT( S ) = Fu ( S)
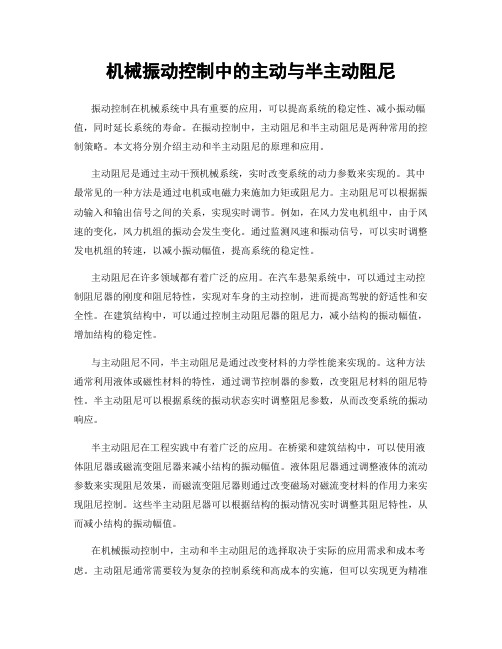
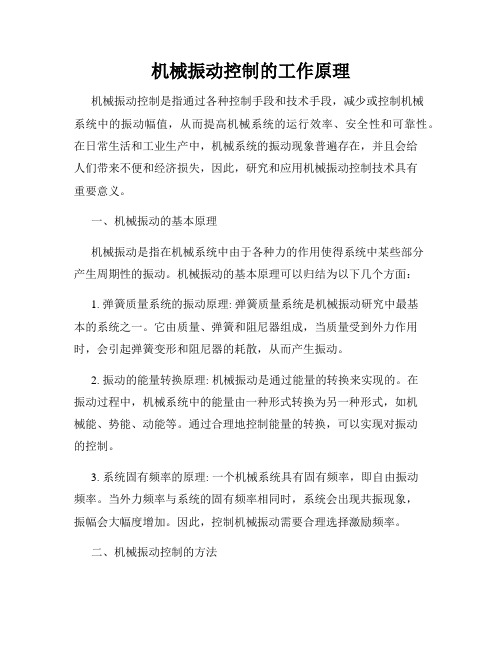
图3 空载时压电作动器电压与输出位移关系曲线 ( 虚线 ) 和 极间电荷与输出位移关系曲线 ( 实线 ) Fig. 3 The dashed l ine is displacement as a function of volt age and t he solid line is displacement as a funct ion of charge f or a f ree act uator
Journal of Mechanical Strength 研究简报
2007, 29( 3) : 496~ 500
周期性机械振动主动控制算法
ALGORITHM OF ACTIVE CONTROL FOR PERIODIC MECHANICAL VIBRATIONS
孙国春
1, 2
田彦涛
2
何丽蒙
3
( 1. 空军航空大学 计算机教研室 , 长春 130022) ( 2. 吉林大学 通信工程学院, 长春 130025) ( 3. 秦皇岛市高级技工学校, 秦皇岛 066000) SUN GuoChun
1
引言
有普遍意义。 目前 , 机械设备隔振的方法很多, 如采用双层隔振 的方法降低机械设备振动向基础或环境的传递 , 是 一种应用广泛且较实用的方法, 但这种方法对于低频 振动 , 特别是对双层隔振装置自身固有频率附近的振 动, 难以进行有效隔离。加装被动悬置是一种传统的 隔振方法 , 此方法由于悬置刚度和阻尼参数固定, 因此 仅对机械设备某一频率附近振动隔离效果较明显。
497
主动悬置是在原被动悬置基础上加主动力装置, 设计者可根据预期目的 , 通过这个主动力装置和预定 的控制策略改变悬置特性 , 以获取较好的隔振效果。 K. Aoki 等 在液阻悬置上加装电磁作动器 , 设计 了针对柴油发动机隔振主动悬置, 采用自适应控制策 [ 3] 略, 明显改善了车箱内的轰鸣声。T akao Ushijima 等 采用压电作动器 , 利用位移放大机构, 针对怠速工况设 计的主动悬置, 对怠速工况下大幅振动的隔振取得明 显效果。 本文讨论在橡胶悬置基础上加装压电作动器, 利 用位移放大机构 , 使主动悬置满足对大幅振动的隔振 要求。文中采用同步滤波 X LMS( 最小均方算法, least mean square) 自适应控制方法对系统进行仿真试验。
[1]
近代机器结构正向大功率、 高速度和轻型化方向 发展 , 振动问题越来越突出。振动会引起噪声污染 , 影 响机器设备的功能, 降低机械加工的精度, 加剧构件的 疲劳和损坏, 缩短机器的使用寿命 , 机器振动还消耗能 量, 降低机器效率等。周期性机械振动是工程中较普 遍的振动现象, 研究此类振动特性与振动控制问题 , 具
1, 2
Tian YanTao
2
He LiMeng
3
( 1. Department of Computer , A ir Force Aviation University , Changchun 130022, China ) ( 2. College of Communication Engineering , Jilin University , Changchun 130025, China ) ( 3. The Senior Technical School of Qinhuangdao City , Qinhuangdao 066000, China )
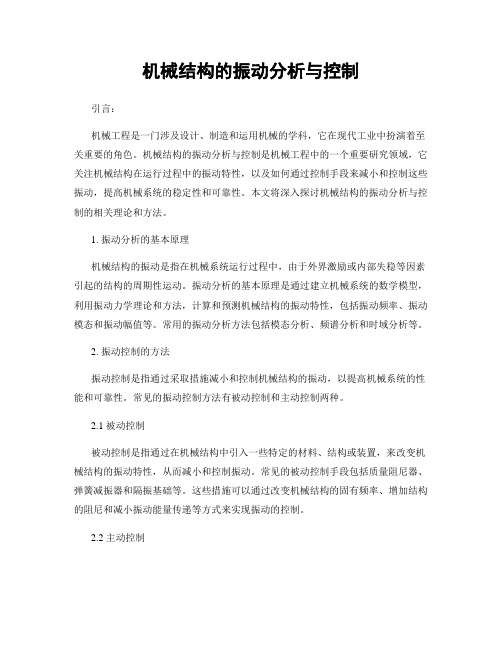
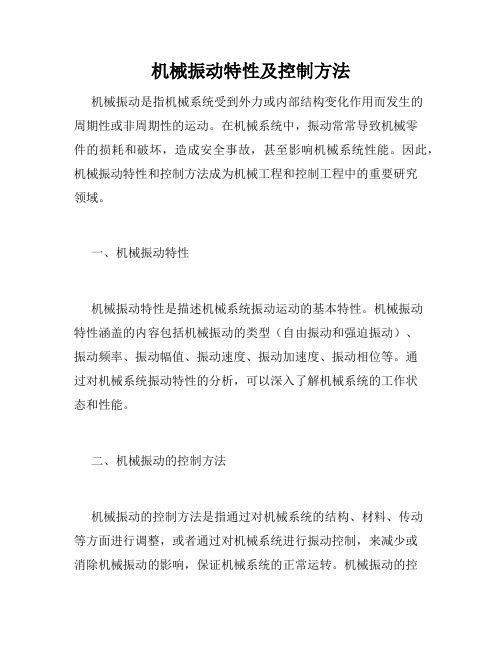
1. 空载 图1 厚型压电作动器结构 图2 压电堆简化力学模型 Simple mechani cal model of mult ilayer piezo actuator 图4 1. Free di splacement
2. 与位移成比例负载
3. 恒定负载
2. Displacement w it h proportional counter force
[ 2]
一般大幅振动隔离的需要, 通过位移放大机构对作动 器位移输出进行放大 , 位移放大机构由不可压缩液体 和大、 小活塞组成, 压电作动器通过大活塞对液体施 压, 液体推动小活塞 , 与振动机械连接的小活塞的位移 按大小活塞 面积比例 增加。 这里大小 活塞面积 比是 7. 2 1, 因此小活塞最大输出位 移是 0. 216 mm 。 压电 作动器和位移放大机构由橡胶主簧支撑。
2
压电作动器特性分析
压电作动器以其体积小、 应力大、 精度和分辨率高 以及频响快和容易控制等优点, 越来越多地被应用到 振动控制领域。本文采用的压电堆作动器是由堆叠在 一起的多片薄型压电陶瓷片基于力学上串联、 电学上 并联的形式而组成( 见图 1) 。压电堆作动器简化的力 学模型如图 2 所示。 其中 m eff 是压电堆等效质量, 大约 为压电堆实际质量的三分之一 , k b 和 c b 分别是压电堆 的等效刚度和阻尼系数, F u 是压电堆产生的内力。
பைடு நூலகம்
Fig. 4 The curves of displacement in two restraint cases and t he free case
主动悬置系统力学模型如图 6 所示 , 其中 m e 为机 器设备质量, m g 为大活塞及压电作动器等效质量 , m a 为橡胶主簧与压电堆作动器间中间质量 , a 为小活塞 面积 , b 为大活塞面积 , k a 为橡胶主簧刚度系数, c a 为 橡胶主簧阻尼系数, k b 为作动器等效刚度系数, c b 为 作动器等效阻尼系数 ; x e 、 x g、 x a 分别为各质量的位移。 在采取电荷反馈控制方法消除和补偿输出迟滞环后, 忽略其非线性特性, 输入电压和输出力之间可看成线 性关系, 列出系统运动方程 m e! x e = F - Fa
Fig. 1 The st ruct ure of multil ayer Fig. 2 piezo actuat or
3. Displacement wit h const ant load 不同负载下的电压与输出位移的关系曲线
在空载情况下 , 施以压电堆的电压与输出位移的 关系曲线如图 3 所示 , 迟滞现象给实际控制带来麻烦。 但因压电堆极间电荷与位移的关系曲线几乎不存在迟 滞环 , 因此可以采取电荷反馈控制方法来消除和补偿 [ 4] 迟滞环 。 压电堆在施以恒定负载时的输出特性曲线与空载 时几乎一样, 但负载力与位移成比例改变时, 特性曲线 [ 5] 有所改变 , 如图 4 所示。
20050528 收到初稿 , 20051020 收到修改稿。 孙国春 , 男, 1963 年 1 月生 , 河北省昌黎县人 , 汉族。空军航空大学飞行基础训练基地基础部计算机教研室教授 , 吉林大学在职博士研究生 , 主 要研究方向为振动主动控制。
第 29 卷第 3 期
孙国春等 : 周期性机械振动主动控制算法
摘要 为提高周期性机械装置的隔振性能 , 减少其对 底座( 或地面 ) 及周围环境的影响 , 采用由弹性橡 胶和压电堆 作
动器 组成的主动悬置 ( active control mount, ACM ) 。针对压电堆作动器输出位 移较小的 情况 , 设计液压位 移放大机构 。通 过对 压电作动器和橡胶主簧性能的分析 , 建立由主动悬置 构成的隔振系统的力学模型。周期性机械振动系统 , 其周期 振 动信号可用作控制同步信号 , 因此控制系统 采用基于同步滤波 X LMS( least mean square) 算法的自适应控制 策略 , 传 递到 机座 的残余力作为误差信号 , 实现对周期性机械振动系统 的主动控制。计算机仿真实验结果表明 , 采用这 种主动悬置 和 同步 滤波 X LMS 算法的主动控制系统 , 相对于采用普通橡胶悬置 的被动系统 , 明显减少 了对底座的 力传递 , 减振效果 明 显。 关键词 Abstract 压电堆作动器 隔振 主动悬置 同步滤波 X LMS( least mean square) 算法 中图分类号 TP273 In order to improve the property of periodic mechanical vibration isolation, reduce its influence to the fundament( floor) and environment from periodic mechanical vibrations, adopt an active control mount( ACM) which consists of elastic rubber and piezo electr ic stack actuator in the system. A hydraulic mechanism is used in the ACM to achieve higher displacements. Through the analysis of the property of the rubber and piezoelectric stack actuator, a mechanical model of the active vibration isolation system with the active mount is established. For a periodic mechanical vibration system, the vibration pulse of machinery can be availed to control synchroniza tion signal for active system, thus choose an adaptive control strategy based on the synchronized filtered X LMS ( least mean square) al gorithm to control the system. The residual force transmitted to the fundament through the mount detected as an error signal, then achie ved active control to periodic mechanical vibration system through the ACM . Simulation shows the active system has a better consequence in reducing the transmitted force significantly with respect to the ACM and the adaptive control than that in the passive system. Key words Piezoelectric stack actuator; Vibration isolation; Active control mount; Synchronized filter X LMS ( least mean square) algorithm Corresponding author : SU N GuoChun , E mail : smz @ public . cc . j l . cn , Tel : + 86 431 6956247, Fax : + 86 431 8921791 Manuscript received 20050528, in revised form 20051020.