动力学与控制-振动控制简介(1)
国外著名振动教材书籍介绍
国外著名振动教材书籍今天从陈立群老师的科学网博客看到一篇介绍国外振动力学教材的博文,觉得挺有参考价值,于是转载了这篇博文。
值得一提的是,陈老师介绍的一部专著--William T. Thomson和Marie Dillon Dahleh合作完成的Theory of Vibration withApplication(5th edtion),是我学习振动力学的主要书籍之一。
记得这本书是几年前在清华大学校园的书店购买,由清华大学出版社影印,到现前我虽已反复仔细阅读了很多遍,但仍旧经常拿出来翻阅参考,爱不释手。
陈老师介绍的另一部教材是Daniel J. Inman的Engineering Vibrations,也是国际上广受好评的振动力学书籍,由于这本书没有电子版,于是我就从图书馆借来(由于山口大学图书馆没有,还是从其他大学图书馆转借),复印后我反复阅读了多遍,获益很深,他的另一部专著--Vibration with Control,是学习振动控制的优秀教材,也是我经常翻阅参考的振动专业书籍之一。
另外,有一部陈老师没有提到的专著就是Ray W. Clough和Joseph Penzien合著的Dynamics of Structures,这是一部极其经典的结构动力学著作,它偏重于土木结构方面,这本书的电子版在网上广泛流传,也因此它成为我开始学习振动力学的第一本书籍,后来在深入学习有限元时,才知道在有限元发展历程中,‘有限元’这一名词是Ray W. Clough 在20世纪50年代首先提出的,他对有限元的发展以及有限元的工程应用做出了了很大贡献。
振动是国内理论与应用力学专业和工程力学专业本科必修课,也是机械、土木、航空等专业本科生或研究生的选修课。
北美大学的情况基本类似,机械、土木、航空、航天和工程力学系一般都开设振动课程。
初级课程由学过工程力学(静力学和动力学)的二、三年级本科生选修,高级课程主要是研究生选修甚至必修。
硬岩掘进机(TBM)的动力学分析与振动控制

硬岩掘进机(TBM)的动力学分析与振动控制发表时间:2018-02-02T14:35:21.403Z 来源:《防护工程》2017年第28期作者:高敏吴文雯[导读] 硬岩掘进机(TBM)是隧道掘进的主要设备,广泛应用于铁路、公路、水利、市政建设等。
中国葛洲坝集团第三工程有限公司陕西西安 710000摘要:硬岩掘进机(TBM)是隧道掘进的主要设备,广泛应用于铁路、公路、水利、市政建设等。
TBM 推进系统机械结构主要包括刀盘、主梁、后支撑、鞍架和撑靴等。
TBM用刀盘转动技术以实现破岩掘进,排渣的同时进行隧道支护,使隧道全断面一次成型。
在TBM作业中,滚刀引起的岩石破碎的强烈冲击会引起推进系统的剧烈振动,严重影响了工作的正常进行。
传统的动力吸振器必须有足够的附加质量才能达到良好的减振效果,但是TBM系统质量庞大安装空间有限,减振器的附加质量难以大幅度提高。
因此本文提出应用杠杆机构来实现放大吸振器的附加质量的方案,并设计了适用于 TBM 推进系统的动力吸振器。
关键词:硬岩掘进机;动力学;振动特性;动力吸振器;优化一、TBM的发展现状1846年开始就出现了第一台简单的硬岩掘进机,从而开始了隧道掘进机机械化的探究。
到1851年一个美国的工程师设计出了世界第一台可以连续工作的TBM,由于当时的技术条件不是很方便,在很多方面的技术问题都不能够被解决,所以没有办法和当时新出现的钻爆法技术相媲美,很难有效地应用。
之后从1952年到1956年,美国的James S. Robbins 和Charles Wilson 想到方法一点一点的解决了滚刀、刀盘驱动及支撑推进等问题,使TBM技术和应用得到了迅速的发展。
早期国外对TBM的广泛应用,使中国也开始注重TBM的研究,我国随着施工技术的不断完善和成熟,在1964年开始对全断面TBM进行研究工作。
在改革开放之后,国外的TBM制造商都来到中国要与我国的生产厂商进行合作。
1996年 Wirth 公司与铁道部宝鸡工程机械厂合作生产用于秦岭隧道的 Wirth TB880E掘进的后配套设备。
直升机动力学基础(直升机振动控制-2010-11)

南京航空航天大学直升机技术研究所 振动响应(气弹响应),以NΩ为主,随谐波次数降低。
南京航空航天大学直升机技术研究所 振动水平随飞行状态而变。激振力在小速度、大速度时较
大,小速度有峰值,振动水平亦然。
南京航空航天大学直升机技术研究所 机体不同部位上,模态特性不同,不同方向、不同频率、振动水 平也不同。
南京航空航天大学直升机技术研究所
1.静止在平衡位置上的单自由度系统,已知参数m、
k、c,求其受简谐激振力 f (t ) F sin( k t ) 作用时的 0 m 响应。 2.一直升机主减速器与机身之间隔振弹簧垂直方向 的刚度为k1,起落架在地面滑跑时垂直方向的刚度 为k2。已知旋翼和主减速器的质量为m1,机身质量 为m2,桨叶片数为n,不计阻尼。 (1)当直升机滑跑时,桨毂上作用有垂直方向的 激振力 F1 sin(nt ) ,求机身的稳态响应。 (2)当直升机飞行时,桨毂上作用有垂直方向的 激振力 F2 sin(nt ) ,求机身的稳态响应。
主动减振系统有频率调谐跟踪式动力吸振器、 高阶谐波控制(HHC)系统、主动控制襟翼 (ACF)——包括机械式或智能结构、结构响应 主动控制(ACSR)系统等,而后在当前受到广泛 关注。 ACSR的基本思想是叠加原理:机体的振动是 由旋翼激振力所引起的振动与ACSR系统产生的激 振响应线性叠加而成,而ACSR的功能就是使其和 为最小。其做法是在直升机机体主要模态的非节 点位置用作动力筒施加激振,从而减小机体关键 部位的振动水平。
分析机体动力学特性的目的: 1)为了准确预估直升机振动水平; 2)在机体结构设计时,能得到满意的 动力学特性,从而降低直升机振动水平。 现代直升机设计一般都采用有限元法来 分析机体动力学特性,但由于机体结构十 分复杂,分析难度大,预估的准确度还不 能令人满意。但有限元分析在解决直升机 振动问题上还是发挥着重要作用。
振动控制 PPT课件

绪 论
振源
受控对象
吸振
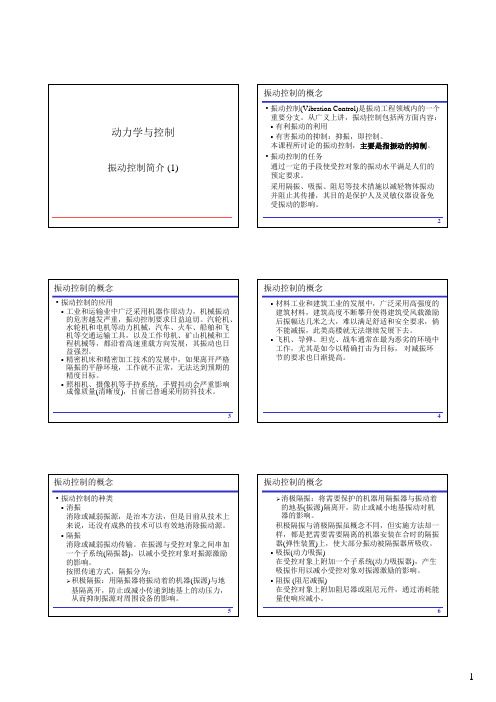
3. 吸振:又称动力吸振。在受控对象上附加一个子系 统称之为动力吸振器,用它产生吸振力以减小受控 对象对振源激励的响应。
– 从能量的角度,使激励能量分配到受控对象和子系统上,并 使分配到受控对象上的能量最小,以达到减振目的。
2019/10/17
南京航空航天大学 振动工程研究所
17
– 作业:迟交或缺一次作业扣10分,两次取消考试资格 – 缺席处理:无故缺席一次扣10分,三次取消考试资格
推荐两个论坛:
SIMWE仿真论坛:/ 振动论坛:/forum/index.php
课件交流邮箱: vc_nuaa@, 密码:vc666888
振动控制 Vibration Control
振动控制 Vibration Control
2019/10/17
南京航空航天大学 振动工程研究所
1
振动控制 Vibration Control
课程在学科体系中的位置
• 振动控制是联系振动理论和控制理论的一门交叉 学科。
• 结构动力学 • 振动数值分析(有限元计算) • 振动测试与分析、模态分析理论
4
振动控制 Vibration Control
参考书籍
• 顾仲权, 振动主动控制 • 张阿舟, 振动控制工程 • 张阿舟, 实用振动工程2 -- 振动控制与设计 • Richard C. Dorf, 现代控制系统(第八版中译
版)
• Wodek K. Gawronshi, Advanced Structural Dynamics and Active Control of Structures
• 主动控制(Active Control):除外界振动源或干扰外,有 其他外部能量输入或交换的振动系统;
动力学与振动控制考试试题

动力学与振动控制考试试题在本文中,将为您提供一份关于动力学与振动控制考试试题的详细解析。
本文将按照试题的难度逐步展开,力求为您提供全面且易于理解的解答。
请仔细阅读以下内容,以便更好地理解与掌握动力学与振动控制领域的知识。
1. 引言动力学与振动控制是研究物体运动规律以及如何控制物体振动的学科。
它在工程学、物理学等领域有着广泛的应用。
本次考试试题旨在检验学生对动力学与振动控制基本概念的理解和能力。
2. 单项选择题请从以下选项中选择正确答案,并简要解释你的选择:1) 简谐振动是指:A) 振幅不变、频率不变的周期振动B) 振幅不变、频率可变的周期振动C) 振幅可变、频率不变的周期振动D) 振幅可变、频率可变的周期振动选择:A解析:简谐振动是指振幅和频率都保持不变的周期振动。
选项A描述了简谐振动的特点,符合定义。
2) 动力学是研究:A) 物体静止状态的学科B) 物体运动状态的学科C) 物体力学特性的学科D) 物体的质量和重力的学科选择:B解析:动力学是研究物体运动及其原因的学科,选项B准确地描述了动力学的研究对象。
3) 过阻尼振动与欠阻尼振动相比,其特点是:A) 振幅变大B) 振幅变小C) 无阻尼振动D) 振幅不变选择:B解析:过阻尼振动是指振幅随时间的推移逐渐减小到零,并且响应速度较慢。
相比之下,欠阻尼振动具有振幅变大的特点。
3. 简答题请简要回答以下问题:1) 什么是自由振动?解析:自由振动是系统在受到外界干扰后释放能量,并在无干扰的情况下以自身固有的频率振荡。
系统在自由振动过程中不受外力的影响。
2) 动力学方程有哪些常见形式?解析:动力学方程是通过质点或物体的运动学信息推导出来的方程。
常见的动力学方程形式有牛顿第二定律、欧拉-拉格朗日方程、哈密顿方程等。
4. 计算题请根据所给条件进行计算:一根长为L的均匀细绳的一端固定,另一端系有质量为m的物体。
当其受到外力作用后,发生简谐振动。
已知细绳所受拉力为T,求该物体的振动周期T。
动力学与控制振动控制简介
04/16/2015
14
线性系统控制模型 • 控制系统
{f (t)}
{ua} 作动器 {ya} {uo} 受控对象 {yo} {us} 测量系统 {ys}
{yc} 控制器 {uc}
线性系统控制模型
受控对象 {xo} [ Ao ]{xo} [Bo ]{uo} [Bf ]{ f } {yo} [Co ]{xo} [Do ]{uo}
6
1
振动控制的概念
结构修改 通过修改受控对象的动力学特性参数使其振动满足 预定的要求,不需附加任何子系统 。
• 被动控制与主动控制 按照控制的能源需求情况来划分,可以分成无源控 制(被动控制)和有源控制(主动控制)两类。 被动控制不需要外界能源,控制装置的结构较为简 单,易于实现,经济性与可靠性较好,在许多场合 下控制效果满意,已经在工程中得到广泛应用。但 是被动控制的局限性也很明显,难以满足越来越高 的工程要求。
作动器 {xa} [ Aa ]{xa} [Ba ]{ua} {ya} [Ca ]{xa}
连接条件
{ya} {uo}, {yo} {us}, {ys} {uc}, {yc} {ua}.
04/16/2015
线性系统控制模型
系统状态方程
x a xx os x c
04/16/2015
复旦大学力学与工程科学系
22
可控性与可观性
可观性 状态量的改变能否通过输出量来反映出来,称为可 观性。 例:对于方程
x1 x2
1 0
0 2
x1 x2
0 1u
(t
)
y 1
带挠性伸杆机构小卫星的复合振动控制

棒性较好 , 但会带来输 出抖动 的问题. 指令整形是
一
种简单的前馈控制方法 , 非常适合用来抑制挠性
结构的残余振动. 他将脉冲序列与一定 的期望输入
相卷积 , 所形成的指令作 为输入来控制系统运动, 其 中脉冲序列与系统的振动频率 以及阻尼有关 , 在 工程 中已经得到广泛的应用 j . 但它的一个缺点就 是会引入 时滞 , 特别 是 当需要抑 制多阶模态振 动 时, 仅采用此方法会引入相 当长的时滞. 考虑到弹 性振动通常具有周期性的特点 , 可考虑在反馈控 制 系统中引入滤波器来抵消振动干扰 的影 响, 且此方 法易于工程实现. 本论文针对上述问题对带挠性伸
杆 小卫 星 的振 动控 制方 法进行 了研 究 .
地 空间环境 的探 测工作是非 常必要的. 与此 同
时, 为 了满足探测任务的性 能要求 , 避免卫星 台本 身的剩磁对空间信息的干扰 , 须采用伸杆机构支撑 各类探测载荷或传感器使其远离卫星本体 , 从而保
证探测数据的准确性和空间信息的精确度. 受运载 空间、 运载能力 和能源消耗 的限制 , 往往将伸 杆做 成轻质 、 可伸缩或 可折叠 的结构 , 所 以伸杆具 有一 定的挠性特性. 挠性伸杆的弹性振动不可避免地会 耦合影 响到小卫星本体 , 导致卫星本体 的振动 , 从
第l 1 卷第 1 期2 0 1 3年 3月
1 6 7 2 - 6 5 5 3 / 2 0 1 3 / 1 1 ( 1 ) / 7 7 - 5
动 力 学 与 控 制 学 报
J O URNAL OF D YNAMI C S AND C ONT RO L
Vo 1 . 1 l N o . 1
如图所示 , 卫星 由刚性本体、 挠性伸杆一和杆
振动力学(结构力学)
从方程的解中还可以看出,系统属于周 期振动,振动的周期为
T 2 n
周期是系统振动一次所需要的时间,单位 为秒(s)。
周期的倒数称为频率,是系统每秒钟振动 的次数,单位为1/秒(1/s)或赫兹(Hz)。记作 f
f 1 n T 2
2.2 自由振动系统
固有频率n和频率 f 只相差常数2,因
振动微分方程的解(P6)
mxkx0
1. 方程的解 设
则方程变为
2 n
k m
xn2x0
通解为
xb 1cosntb 2sinnt
或
xAsin(ntf)
2.2 自由振动系统
设系统的初始条件为:t=0时,x=x0,x x0
则可确定上述解中的常数为:
b1 x0 ,
b2
x0
n
A
2
x02x0n ,
farctannx0
分为自由振动、强迫振动和自激振动。 自由振动:系统受到初始激励作用后,仅靠其本身 的弹性恢复力“自由地”振动,其振动的特性仅决定 于系统本身的物理特性(质量和刚度);(如摆钟) 受迫振动或称强迫振动:系统受到外界持续的激励 作用而“被迫地”进行振动,其振动特性除决定于系
统本身的物理特性外,还决定于激励的特性; 工程中的大部分振动都属于此类振动(振动机械、
x0
2.2 自由振动系统
2. 概念与名词(P6-7) 一阶线性振动微分方程的解是时间 t 的
简谐函数,因此这种振动为简谐振动。
方程的解中n只决定于系统本身的参数
m和k,而与系统的初始条件无关,是系统本 身所固有的特性,所以称为固有频率,或称 圆频率或角频率。
方程解中的A称为振幅,是质量偏离静平
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
其分量形式为
1 x1 x x 2 2 x2 u (t )
可见,输入量u(t)不能改变 x1 的值,因而 x1是不可 控的。
21
04/16/2015
复旦大学力学与工程科学系
22
可控性与可观性
可控性与可观性
可控性与可观性是现代控制论的基本概念,更深入 的内容已经超出本课程的内容,这里不再讨论。
04/16/2015
17
04/16/2015
18
3
线性系统控制模型
可控性与可ቤተ መጻሕፍቲ ባይዱ性
• 反馈控制的基本方式
受控系统方程可以表示为
} [ A]{x} [ Bu ]{u} [ B f ]{ f } {x
系统输出方程
0 0 0 x a 0 y a C a y D C C 0 0 o o a x o 0 o v 0 Cs 0 x s E s y s 0 0 D cC s Cc y c 0 x c Dc E s 响应控制问题 已知{f(t)},确定控制器参数[Ac]、[Bc]、[Cc]和[Dc], 以满足预定的动力响应指标的要求。 动稳定性问题 取{f(t)}={0}(通常同时取{v}={0}),根据对应的 其次方程确定满足稳定性要求的控制器参数。
能源
作动器 子系统 受控对象 测量系统
控制器
受控对象:产品、结构或者系统的总称。 作动器:动作机构,提供力或者力矩,可以直接施 加于受控对象上,也可以通过附加子系统向受控对 象施加作用力或者力矩。 控制器:实现控制律的核心环节。对于闭环系统来 说,控制器以受控对象的振动状态作为输入,以作 动器的驱动指令作为输出;对于开环系统来说,控 制器的“输入”是预先设定的程序。 测量系统:获取受控对象振动信息的子系统,可能 包括传感器、适配器、放大器、滤波器等部件。
可观性 状态量的改变能否通过输出量来反映出来,称为可 观性。 例:对于方程
1 1 0 x1 0 x u (t ) x2 0 2 x2 1 x y 1 0 1 x2
输出量y不能反映状态量x2的变换情况,因而x2不可 观。
(2)
13 14
其中,
04/16/2015
线性系统控制模型
• 控制系统
{ f (t)} {ua}
作动器
线性系统控制模型
受控对象
o } [ Ao ]{xo } [ Bo ]{uo } [ B f ]{ f } {x
{ya} {uo}
受控对象
{yo} {us}
测量系统
{ys}
{ yo } [Co ]{xo } [ Do ]{uo }
11
12
2
线性系统控制模型
• 多自由度线性振动系统的振动方程
} [C ]{q } [ K ]{q} {P (t )} [ M ]{q
线性系统控制模型
(1)
M 1C M 1K M 1 0 , [ B ] ; [ A] I 0 0 0 P (t ) { f (t )} . 0
5
的地基(振源)隔离开,防止或减小地基振动对机 器的影响。 积极隔振与消极隔振虽概念不同,但实施方法却一 样,都是把需要需要隔离的机器安装在合时的隔振 器(弹性装置)上,使大部分振动被隔振器所吸收。 吸振(动力吸振) 在受控对象上附加一个子系统(动力吸振器),产生 吸振作用以减小受控对象对振源激励的影响。 阻振 (阻尼减振) 在受控对象上附加阻尼器或阻尼元件,通过消耗能 量使响应减小。
振动控制的概念
• 振动控制(Vibration Control)是振动工程领域内的一个
重要分支。从广义上讲,振动控制包括两方面内容: 有利振动的利用 有害振动的抑制:抑振,即控制。 本课程所讨论的振动控制,主要是指振动的抑制。 • 振动控制的任务 通过一定的手段使受控对象的振动水平满足人们的 预定要求。 采用隔振、吸振、阻尼等技术措施以减轻物体振动 并阻止其传播,其目的是保护人及灵敏仪器设备免 受振动的影响。
3
材料工业和建筑工业的发展中,广泛采用高强度的 建筑材料,建筑高度不断攀升使得建筑受风载激励 后振幅达几米之大,难以满足舒适和安全要求,倘 不能减振,此类高楼就无法继续发展下去。 飞机、导弹、坦克、战车通常在最为恶劣的环境中 工作,尤其是如今以精确打击为目标, 对减振环 节的要求也日渐提高。
4
振动控制的概念
2
动力学与控制
振动控制简介 (1)
振动控制的概念
• 振动控制的应用
振动控制的概念
工业和运输业中广泛采用机器作原动力,机械振动 的危害越发严重,振动控制要求日益迫切。汽轮机、 水轮机和电机等动力机械,汽车、火车、船舶和飞 机等交通运输工具,以及工作母机、矿山机械和工 程机械等,都沿着高速重载方向发展,其振动也日 益强烈。 精密机床和精密加工技术的发展中,如果离开严格 隔振的平静环境,工作就不正常,无法达到预期的 精度目标。 照相机、摄像机等手持系统,手臂抖动会严重影响 成像质量(清晰度),目前已普遍采用防抖技术。
假定[M]是正定矩阵,则有
} [ M ]1[C ]{q } [ M ]1[ K ]{q} [ M ]1{P (t )} {q
引入状态向量
q {x} q
今后,我们假定振动方程写成以(2)式的形式,符号 [M]、[C]、[K]可能挪作它用。
得到
} [ A]{x} [ B ]{ f (t )} {x
6
1
振动控制的概念
结构修改 通过修改受控对象的动力学特性参数使其振动满足 预定的要求,不需附加任何子系统 。 • 被动控制与主动控制 按照控制的能源需求情况来划分,可以分成无源控 制(被动控制)和有源控制(主动控制)两类。 被动控制不需要外界能源,控制装置的结构较为简 单,易于实现,经济性与可靠性较好,在许多场合 下控制效果满意,已经在工程中得到广泛应用。但 是被动控制的局限性也很明显,难以满足越来越高 的工程要求。
04/16/2015
复旦大学力学与工程科学系
23
04/16/2015
复旦大学力学与工程科学系
24
4
{f}为外载荷。
{yc}
控制器
{uc}
测量系统
s } [ As ]{xs } [ Bs ]{u s } {x
{ y s } [C s ]{xs } [ Es ]{v}
{v}为测量系统的噪声干扰。
04/16/2015
15
04/16/2015
16
线性系统控制模型
线性系统控制模型
{ yc } [Cc ]{xc } [ Dc ]{uc }
作动器
a } [ Aa ]{xa } [ Ba ]{ua } {x
{ ya } [Ca ]{xa }
连接条件
{ ya } {uo }, { yo } {u s }, { ys } {uc }, { yc } {ua }.
振动控制的概念
振动主动控制是主动控制技术在振动领域中的一项 重要应用,包括开环控制与闭环控制两类。 开环控制 开环控制又称程序控制,其控制器采用的控制规律 是预先设定的,与受控对象的振动状态无关。
能源 控制器 作动器 子系统 受控对象
7
8
振动控制的概念
振动控制的概念
• 系统构成
闭环控制 以受控对象的振动状态为反馈信息,进行实时的外 加控制,使受控对象的振动满足预定要求。
输出反馈控制 取
{u} [ K 2 ]{ y}
输出量只设计部分状态量(测量值),容易实现。但 是效果可能较差,在某些情况下控制律的设计难度 很大。 • 可控性与可观性 可控性 输入能否控制系统状态的变化,称为可控性。对于 前述线性系统模型,我们关心的是控制量对状态变 量的控制能力。
04/16/2015
10
9
振动控制的概念
能源:提供作动器工作所需的外界能量。 附加子系统:附加控制子结构或子系统的总称,其 存在性由实际情况决定。 • 常见的主动控制问题 动力响应的主动控制 动稳定性的主动控制
振动控制的概念
• 振动控制的主要环节
确定振动源特征与振动特性 确定振动控制水平(指标) 确定振动控制方法 分析与设计 控制的实现
04/16/2015
{ y} [C ]{x} [ D]{u}
状态反馈控制 取
{u} [ K1 ]{x}
[K1]称为状态反馈控制矩阵。这类控制要求获得全 部状态信息,实际上很难满足要求。
19
04/16/2015
20
可控性与可观性
可控性与可观性
例:对于方程
1 1 0 x1 0 x u (t ) x 2 0 2 x2 1
控制器
c } [ Ac ]{xc } [ Bc ]{uc } {x
系统状态方程
a Aa B a Dc C s 0 x x Ao 0 o B oC a x B D C B C A s o s s s o a c 0 B cC s x 0 0 B a Dc E s 0 B f f v 0 0 0 BE c s B a C c x a 0 x o 0 x s Ac x c