台达AS系列PLC寄存器地址与Modbus寄存器地址对照表
modbus地址对应表
modbus地址对应表曾经做过单片机和以下20种PLC的Modbus RTU串口通信,现将这20种PLC输入、输出和寄存器元件与Modbus编号地址对应表分享出来。
三菱FX3G-40MR/ES-A、西门子S7-200 CPU226 AC/DC/RLY、欧姆龙CP1H-X40DR-A、松下AFPX-C40R、台达DVP-12SA2、信捷XC5-48、永宏FBs-40MC、产电XBC-DR40S、汇川H2u-2416MT-XP、英威腾IVC2H-1616MAT6、基恩士KV-N40AR、施耐德电气TM218LDAE40DRPHN、海为H40S2R系列、维控LX3V1212MT系列、和利时LE5109、台安AP-340BR-A、罗克韦尔1766-L32BWA、合信CTH200系列CPU H226L、富士SPE NW0P40R-31、步科K508-40AR。
,三菱X元件支持Modbus之02功能码;Y元件支持Modbus之01、05、15功能码;D元件支持Modbus之03、06、16功能码。
西门子I元件支持Modbus之02功能码;Q元件支持Modbus之01、05、15功能码;V元件支持Modbus之03、06、16功能码。
欧姆龙CIO0元件支持Modbus之02功能码;CIO100元件支持Modbus之01、05、15功能码;D元件支持Modbus之03、06、16功能码。
松下X元件支持Modbus之02功能码;Y元件支持Modbus之01、05、15功能码;DT元件支持Modbus之03、06、16功能码。
台达X元件支持Modbus之02功能码;Y元件支持Modbus之01、05、15功能码;D元件支持Modbus之03、06、16功能码。
信捷X元件支持Modbus之02功能码;Y元件支持Modbus之01、05、15功能码;D元件支持Modbus之03、06、16功能码。
永宏X元件支持Modbus之02功能码;Y元件支持Modbus之01、05、15功能码;D元件支持Modbus之03、06、16功能码。
modbus地址对应表

modbus地址对应表协议版本Modbus协议目前存在用于串口、以太网以及其他支持互联网协议的网络的版本。
大多数Modbus设备通信通过串口EIA-485物理层进行。
对于串行连接,存在两个变种,它们在数值数据表示不同和协议细节上略有不同。
Modbus RTU是一种紧凑的,采用二进制表示数据的方式,Modbus ASCII是一种人类可读的,冗长的表示方式。
这两个变种都使用串行通信(serial communication)方式。
RTU格式后续的命令/数据带有循环冗余校验的校验和,而ASCII格式采用纵向冗余校验的校验和。
被配置为RTU变种的节点不会和设置为ASCII变种的节点通信,反之亦然。
对于通过TCP/IP(例如以太网)的连接,存在多个Modbus/TCP变种,这种方式不需要校验和计算。
对于所有的这三种通信协议在数据模型和功能调用上都是相同的,只有封装方式是不同的。
Modbus有一个扩展版本Modbus Plus(Modbus+或者MB+),不过此协议是Modicon专有的,和Modbus不同。
它需要一个专门的协处理器来处理类似HDLC的高速令牌旋转。
它使用1Mbit/s的双绞线,并且每个节点都有转换隔离装置,是一种采用转换/边缘触发而不是电压/水平触发的装置。
连接Modbus Plus到计算机需要特别的接口,通常是支持ISA(SA85),PCI或者PMCIA总线的板卡。
通信和设备Modbus协议是一个master/slave架构的协议。
有一个节点是master节点,其他使用Modbus协议参与通信的节点是slave节点。
每一个slave设备都有一个唯一的地址。
在串行和MB+网络中,只有被指定为主节点的节点可以启动一个命令(在以太网上,任何一个设备都能发送一个Modbus命令,但是通常也只有一个主节点设备启动指令)。
一个ModBus命令包含了打算执行的设备的Modbus地址。
所有设备都会收到命令,但只有指定位置的设备会执行及回应指令(地址0例外,指定地址0的指令是广播指令,所有收到指令的设备都会运行,不过不回应指令)。
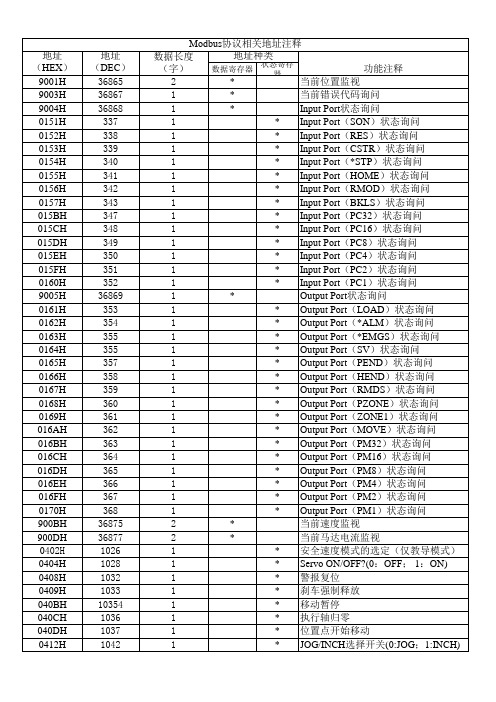
MODBUS地址表
台达PLC MODRD MODRW指令
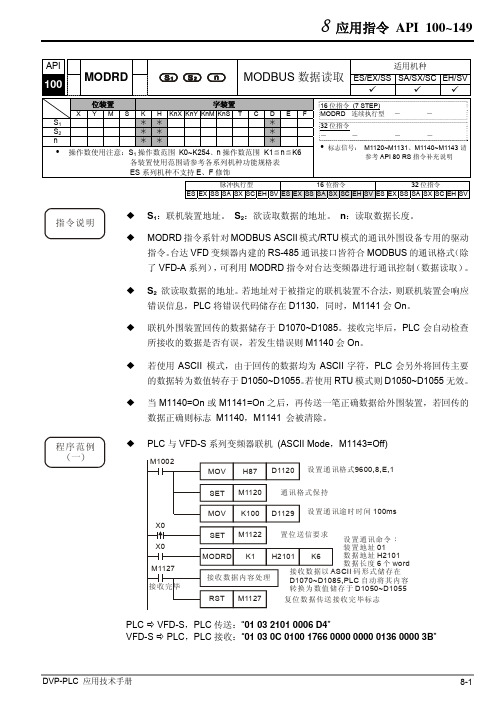
当 M1140=On 或 M1141=On 之后,再传送一笔正确数据给外围装置,若回传的 数据正确则标志 M1140,M1141 会被清除。
程序范例 (一)
PLC 与 VFD-S 系列变频器联机 (ASCII Mode,M1143=Off)
M1002
MOV H87 D1120 设置通讯格式9600,8,E,1
S2 欲读取数据的地址。若地址对于被指定的联机装置不合法,则联机装置会响应 错误信息,PLC 将错误代码储存在 D1130,同时,M1141 会 On。
联机外围装置回传的数据储存于 D1070~D1085。接收完毕后,PLC 会自动检查 所接收的数据是否有误,若发生错误则 M1140 会 On。
若使用 ASCII 模式,由于回传的数据均为 ASCII 字符,PLC 会另外将回传主要 的数据转为数值转存于 D1050~D1055。若使用 RTU 模式则 D1050~D1055 无效。
DVP-PLC 应用技术手册
8 应用指令 API 100~149
程序范例 (二)
PLC 与 VFD-S 系列变频器联机 (RTU Mode,M1143=On)
M1002
MOV H87 D1120 设置通讯格式 9600,8,E,1
SET M1120 通讯格式保持
MOV K100 D1129 设置通讯逾时时间 100ms
ES 系列机种不支持 E、F 修饰
16 位指令 (7 STEP)
MODWR 连续执行型 -
-
32 位指令
-
-
-
-
标志信号: M1120~M1131、M1140~M1143 请 参考 API 80 RS 指令补充说明
脉冲执行型
16 位指令
modbus地址对应表
Modbus协议定义的寄存器地址是5位十进制地址,即:
线圈(DO)地址:00000~09999
触点(DI)地址:10000~19999
输入寄存器(AI)地址:30000~39999
输出寄存器(AO)地址:40000~49999
由于上述各类地址是唯一对应的,因此有些资料就以其第一个数字区分各类地址,即:0x代表线圈(DO)类地址,1x代表触点(DI)类地址、3x代表输入寄存器(AI)类地址、4x代表输出寄存器(AO)类地址。
在实际编程中,由于前缀的区分作用,所以只需说明后4位数,而且需转换为4位十六进制地址。
Modbus是一种串行通信协议,是Modicon公司(现在的施耐德电气Schneider Electric)于1979年为使用可编程逻辑控制器(PLC)通信而发表。
Modbus已经成为工业领域通信协议的业界标准(De facto),并且现在是工业电子设备之间常用的连接方式。
Modbus是一种串行通信协议,是Modicon公司(现在的施耐德电气Schneider Electric)于1979年为使用可编程逻辑控制器(PLC)通信而发表。
Modbus已经成为工业领域通信协议的业界标准(De facto),并且现在是工业电子设备之间常用的连接方式。
Modbus比其他通信协议使用的更广泛的主要原因有:
对供应商来说,修改移动本地的比特或字节没有很多限制
Modbus允许多个(大约240个) 设备连接在同一个网络上进行通信,举个例子,一个由测量温度和湿度的装置,并且将结果发送给计算机。
在数据采集与监视控制系统(SCADA)中,Modbus通常用来连接监控计算机和远程终端控制系统(RTU)。
modbus地址对应表
D元件支持Modbus之03、06、16功能码。
松下
X元件支持Modbus之02功能码;
Y元件支持Modbus之01、05、15功能码;
DT元件支持Modbus之03、06、16功能码。
台达
X元件支持Modbus之02功能码;
Y元ห้องสมุดไป่ตู้支持Modbus之01、05、15功能码;
自2004年4月施耐德电气将权利转让给Modbus组织以来,该组织一直管理着Modbus协议的开发和更新。[1] Modbus组织是一个倡导持续使用该技术的协会,其由兼容Modbus设备的用户和供应商组成。
D元件支持Modbus之03、06、16功能码。
Modbus是一种串行通信协议,由Modicon公司(现在的施耐德电气Schneider Electric)于1979年发布,用于可编程逻辑控制器(Programmable logic controllers,PLCs)。Modbus事实上已经成为工业领域通信协议的业界标准,并且现在是工业电子设备之间常用的连接方式。 在工业应用场景中使用Modbus的主要原因是:
考虑到Modbus本就为了工业应用而开发,
公开发布,并且无版权要求,
易于部署和维护,
未对供应商修改移动本地比特或字节施加限制。
Modbus支持多个设备连接到同一网络上进行通信,例如,一个能测量温度和湿度并将结果传送给计算机的装置。在数据采集与监视控制(Supervisory control and data acquisition, SCADA)系统中,Modbus常用于连接监控计算机与远程终端设备(Remote terminal unit,RTU)。许多数据类型是根据梯形逻辑及其驱动继电器在工业上的使用而得名的:单比特物理输出称为线圈,单比特物理输入称为离散输入或触点。
modbus地址对应表
Modbus通讯协议:Modbus是一种串行通信协议,是Modicon公司(现在的施耐德电气Schneider Electric)于1979年为使用可编程逻辑控制器(PLC)通信而发表。
Modbus已经成为工业领域通信协议的业界标准(De facto),并且现在是工业电子设备之间常用的连接方式。
简介:Modbus是一种串行通信协议,是Modicon公司(现在的施耐德电气Schneider Electric)于1979年为使用可编程逻辑控制器(PLC)通信而发表。
Modbus已经成为工业领域通信协议的业界标准(De facto),并且现在是工业电子设备之间常用的连接方式。
Modbus比其他通信协议使用的更广泛的主要原因有:公开发表并且无版权要求易于部署和维护对供应商来说,修改移动本地的比特或字节没有很多限制Modbus允许多个(大约240个) 设备连接在同一个网络上进行通信,举个例子,一个由测量温度和湿度的装置,并且将结果发送给计算机。
在数据采集与监视控制系统(SCADA)中,Modbus通常用来连接监控计算机和远程终端控制系统(RTU)。
协议版本:Modbus协议目前存在用于串口、以太网以及其他支持互联网协议的网络的版本。
大多数Modbus设备通信通过串口EIA-485物理层进行。
对于串行连接,存在两个变种,它们在数值数据表示不同和协议细节上略有不同。
Modbus RTU是一种紧凑的,采用二进制表示数据的方式,Modbus ASCII是一种人类可读的,冗长的表示方式。
这两个变种都使用串行通信(serial communication)方式。
RTU格式后续的命令/数据带有循环冗余校验的校验和,而ASCII格式采用纵向冗余校验的校验和。
被配置为RTU变种的节点不会和设置为ASCII变种的节点通信,反之亦然。
对于通过TCP/IP(例如以太网)的连接,存在多个Modbus/TCP 变种,这种方式不需要校验和计算。
台达plc寄存器
台达plc的寄存器名称用高位地址来区别如PROFIBUS-DP 转MODBUS RTU/ASCII 协议产品介绍简介通科技有限公司开发出的DDMC2PF1(DDMC2PF2)产品支持将PROFIBUS-DP从站设备中PIW、PQW映射为DBUS RTU/ASCII中的读(1号)写(15号)多个线圈(0xxxx)命令、写(5号)单个线圈(0xxxx)命读输入继电器2号(1xxxx)命令、读(4号)输入寄存器(3xxxx)命令、读(3号)写(16号)多个保持存器(4xxxx),写(6号)单个保持寄存器(4xxxx),可满足大多数MODBUS设备与PROFIBUS交换数据。
要技术参数:MC2PF1与DDMC2PF2主要区别:DDMC2PF1全部采用端子连接方式,而DDMC2PF2的Profibus为DB9针总线接口并扩展有4线端子连接口,其他并无区别!主要技术参数通讯口1连接模式:标准 PROFIBUS-DP从站模式(采用西门子专用ASIC芯片);讯速度为9600 Bps~6 MBps自动适应;PROFIBUS网络中允许连接126个DDMC2PF1模块,通过拨码开关设置。
模块固定站用48个PIW远程输入寄存器和48个PQW远程输出寄存器!别提醒:第48个PIW被固定设置为:PIBxxH的8个位从低到高分别表示为1~8#MODBUS备的通讯超时标志位,当对应位为1,则表示该设备通讯出现超时故障;BxxL的8个位从低到高分别表示为1~8#MODBUS设备的通讯应答非法标志位,当对应位为1,则表该设备通讯出现非法操作故障!DDMC2PF2中某个设备号仅写入1个保持寄存器时,则DDMC2PF1则按6号命令写单个保持寄存器!写单个线圈,则自动为5号命令(Profibus中仍然占1个PQW字,当需要该线圈通,PQW必须写入大1的任何数据,断开必须写0)。
果写保持寄存器数目超过1个,则自动按16号命令完成多个寄存器写入命令。
modbus地址对应表
CPU 百度上的通信口(Port0)支持Modbus RTU 从站通信协议S7-200 CPU上的通信口Port0可以支持Modbus RTU协议,成为Modbus RTU从站。
此功能是通过S7-200的自由口通信模式实现,因此可以通过无线数据电台等慢速通信设备传输。
如果想在S7-200 CPU之间、或者其他支持Modbus RTU的设备使用Modbus RTU协议通信,需要由有S7-200 CPU做Modbus 主站。
S7-200 CPU做主站必须由用户自己用自由口模式,按相关协议编程。
详情请参考《S7-200系统手册》之相关章节。
要实现Modbus RTU通信,需要STEP 7-Micro/WIN32 V3.2以上版本的编程软件,而且须安装STEP 7-Micro/WIN32 V3.2 Instruction Library(指令库)。
Modbus RTU功能是通过指令库中预先编好的程序功能块实现的。
Modbus RTU从站指令库只支持CPU上的通信0口(Port0)。
参考:Modbus RTU 文库主站指令库基本步骤:1. 检查Micro/WIN的软件版本,应当是STEP 7-Micro/WIN V3.2以上版本。
2. 检查Micro/WIN的指令树中是否存在Modbus RTU从站指令库(图1),库中应当包括MBUS_INIT和MBUS_SLAVE两个子程序。
如果没有,须安装Micro/WIN32 V3.2的Instruction Library(指令库)软件包;3. 编程时使用SM0.1调用子程序MBUS_INIT进行初始化,使用SM0.0调用MBUS_SLAVE,并指定相应参数。
关于参数的详细说明,可在子程序的局部变量表中找到;图中参数意义如下:a. 模式选择:启动/停止Modbus,1=启动;0=停止b. 从站地址:Modbus从站地址,取值1~247c. 波特率:可选1200,2400,4800,9600,19200,38400,57600,115200d. 奇偶校验:0=无校验;1=奇校验;2=偶校验e. 延时:附加字符间延时,缺省值为0f. 最大I/Q位:参与通信的最大I/O点数,S7-200的I/O映像区为128/128,缺省值为128g. 最大AI字数:参与通信的最大AI通道数,可为16或32 h. 最大保持寄存器区:参与通信的V存储区字(VW)i. 保持寄存器区起始地址:以&VBx指定(间接寻址方式)j. 初始化完成标志:成功初始化后置1 k. 初始化错误代码l. Modbus执行:通信中时置1,无Modbus 通信活动时为0。
台达PLC通信协议详情ModbusASCII(DVP)
实用标准文案
例 12: 强制 1 号站的 Y0 置位 例 13: 强制 1 号站的 Y0 复位
文档
实用标准文案
例 14: 强制 1 号站的 M0置位 例 15: 强制 1 号站的 M0复位
文档
数据长度 数据 (D0) 数据 (D1) 数据 (D2) 数据 (D3) 数据 (D4) 数据 (D5) 数据 (D6) 数据 (D7)
LRC 码 帧尾 (0x0D,0x0A)
例 3:把 0010H写入 1 号站的 D0 寄存器
文档
实用标准文案
PC=>PLC: : 01 10 1000 0001 02 0010 CC \CR\LF
例 1:读取 1 号站的 D0(地址为 1000H)寄存器数据
文档
实用标准文案
PC=>PLC: : 01 03 1000 0001 EB \CR据 (读取数量 )
LRC 码 帧尾 (0x0D,0x0A)
PLC=>PC:
: 01 03 02 03FB FC \CR\LF
帧头 (0x3A) 站号
功能码 数据长度 ( 字节 )
数据 LRC 码 帧尾 (0x0D,0x0A)
文档
实用标准文案
例 2:读取 1 号站的 D0-D7( D0地址为 1000H, D7 地址为 1007H,)寄存器数据
PLC=>PC:: 01 03 10 03FB 0C4E 07E7 0C5A 0BC9 0C5A 0FBB 0C4E E2 \CR\LF
实用标准文案
台达 PLC通信协议 ModbusASCII(DVP)
编撰:李浩特 日期: 2013/11/12 版本: Ver:3.2
例 1:读 D0(地址为 1000H)寄存器数据 -------------------------------2 例 2:读 D0-D8(D0 地址为 1000H,D8 地址为 1008H)寄存器数据 ----------3 例 3:把 0010H写入 D0 数据寄存器 ------------------------------------4 例 4:写 D10-D17数据寄存器 -----------------------------------------5 例 5:强制把 0010H写入 D0数据寄存器 --------------------------------5 例 6:读取 M0(地址为 0800H)状态 -------------------------------------6 例 7:读取 M0-Y32状态 ----------------------------------------------6 例 8:读取 Y0(地址为 0500H)状态 -------------------------------------7 例 9:读取 Y0-Y37 状态 ----------------------------------------------7 例 10:读取 X0(地址为 0400H)状态 ------------------------------------8 例 11:读取 X0-X37 状态 --------------------------------------------8 例 12:强制 Y0 置位 ------------------------------------------------9 例 13:强制 Y0 复位 ------------------------------------------------9 例 14:强制 M0置位 ------------------------------------------------10 例 15:强制 M0复位 ------------------------------------------------10