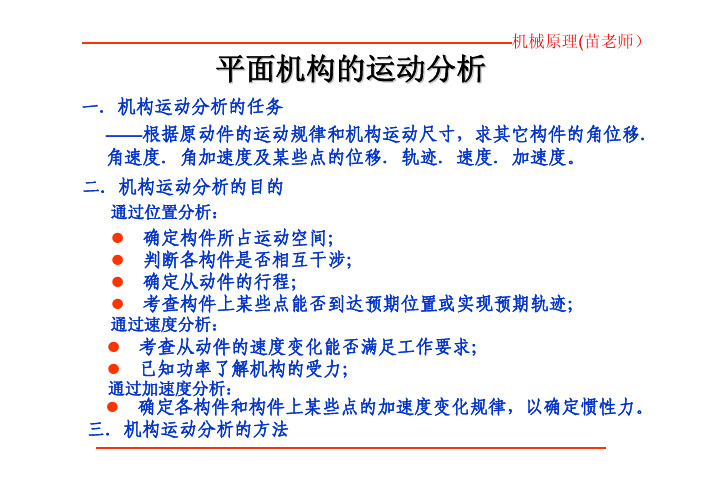
连杆机构运动分析指导
连杆机构的分析和设计

连杆机构的分析和设计连杆机构是一种常见的机械传动装置,具有结构简单、传动平稳等优点,被广泛应用于各个领域。
本文将对连杆机构的分析与设计进行详细介绍。
连杆机构由连杆和关节构成,其中关节是使连杆之间能够相对运动的连接部件。
连杆机构可分为四杆机构、双曲杆机构和单曲杆机构等多种类型。
其中,四杆机构最为常见,是由四根连杆组成的机构。
机构结构分析是指对机构的组成部件进行材料选择、尺寸设计等工作。
在选择材料时,需考虑连杆的抗拉强度、抗压强度等因素。
在尺寸设计中,需满足机构的强度要求,同时尽量减小机构的质量和体积。
此外,连杆机构还需考虑连杆的相互约束关系,以保证机构的稳定性。
运动分析是指对机构运动规律进行研究。
在分析连杆机构的运动规律时,首先需要确定机构中各个连杆的运动关系。
常用的分析方法包括位置分析和速度分析等。
位置分析是指通过几何方法,确定机构各杆件的位置关系,以及杆件随时间变化的位置。
速度分析是指通过运动学方法,确定机构各杆件的速度关系,以及杆件随时间变化的速度。
在连杆机构的设计中,除了满足基本的运动规律外,还需考虑一些实际问题。
比如,在机构设计中,需考虑连杆的制造精度、装配误差等因素,以保证机构的运动精度。
在机构的运动平稳性分析中,需考虑机构的平衡性,避免机构发生过大的振动和冲击。
此外,在连杆机构设计中,还需考虑力学中的静力学平衡条件,以确保机构中各部件受力平衡,避免发生失稳或破坏。
在连杆机构的设计中,还可以根据不同的需求进行优化设计。
比如,在满足机构基本要求的前提下,通过调整连杆的形状和尺寸等参数,以提高机构的运动性能。
此外,还可以通过使用特殊连杆形式,如曲柄滑块机构、摇杆机构等,实现特定的运动要求。
总之,连杆机构的分析与设计是一项复杂而重要的工作,需要综合考虑材料选择、尺寸设计、运动规律分析等多个因素。
通过合理的分析与设计,可以确保连杆机构的性能与稳定性,提高机构的使用寿命和效率,实现机构的优化设计。
平面连杆机构运动分析及设计

3选不同的构件为机架
3
1
4
A
2
B
C
直动滑杆机构
手摇唧筒
这种通过选择不同构件作为机架以获得不同机构的方法称为:
机构的倒置
B
C
3
2
1
4
A
导杆机构
3
1
4
A
2
B
C
曲柄滑块机构
3
1
4
A
2
B
C
摇块机构
3
1
4
A
2
B
C
A
B
C
3
2
1
4
天津工业大学专用 作者: 潘存云教授
摆转副——只能作有限角度摆动的运动副;
曲柄
连杆
摇杆
§3-2 平面四杆机构的类型和应用
1 平面四杆机构的基本型式
天津工业大学专用 作者: 潘存云教授
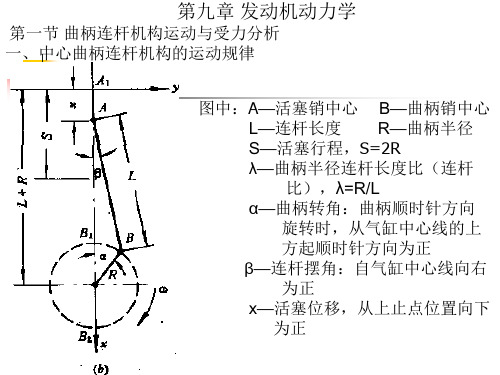
第三章 平面连杆机构运动分析与设计
§3-1 连杆机构及其传动特点
§3-2 平面四杆机构的类型和应用
§3-3 平面四杆机构的基本知识
§3-6 平面四杆机构的设计
§3-4 运动分析——速度瞬心法
§3-5 运动分析——矢量方程图解法
天津工业大学专用 作者: 潘存云教授
作者:潘存云教授
1 改变构件的形状和运动尺寸
偏心曲柄滑块机构
对心曲柄滑块机构
曲柄摇杆机构
曲柄滑块机构
双滑块机构
正弦机构
s
=l sin φ
↓ ∞
→∞
φ
l
2 平面四杆机构的演化型式
天津工业大学专用 作者: 潘存云教授
曲柄连杆机构的运动与受力分析讲解学习
定义“曲拐当量质量”为:
则: Prqmqdr2
mqdmqx2mqbrb
如果曲拐的某一曲柄臂上设有平衡重,其质量为 m p ,而其质心
距曲轴轴线的距离为 p ,则平衡重的旋转惯性力为:
Prpmpp2r2mprp
定义“平衡重当量质量”为:
mpd
mp
p
r
(1-32)
则: Prpmpdr2 (1-33)
(2)活塞速度:在0 ºCA~90 ºCA之间和 270 ºCA~360 ºCA之间,活塞速度各出现 一个正极值和负极值。 (3)活塞加速度:在上止点前后活塞加 速度是正值,方向是活塞下行的方向,往 复惯性力朝上;在下止点前后活塞加速度 是负值,方向是活塞上行的方向,往复惯 性力朝下。根据极值方法求解,可得:
1.2.2.2 单个曲拐的旋转惯性力
曲轴上曲柄不平衡部 分的质量分为两部分:
(1)曲柄销部分:
图1-10 单曲拐的旋转惯性力
Prxmqxr2 (1-28)
(r为曲柄半径)
(2)曲柄臂部分: Prbmqbb2 (1-29)
( b 为曲柄臂质心至曲轴轴线的垂直距离)
整个曲拐的旋转惯性力就是:
P rq P rx 2 P rb r2 m q x2 m qbrb
由式(1-3)知:
arc s i(n1-12)
极值: e arcsin角速度: l Nhomakorabead
dt
cos cos
cos 1 2 sin 2
1 (1-13)
2
角速度极值:le
角加速度:l d d l t c s i o n d d s tc o c s s2 o i n s d d t
1.2.2.3 连杆的惯性力
第九章-曲柄连杆机构动力学分析
Pj m j a m j R 2 cos m j R 2 cos2 PjI PjII
(2)、旋转惯性力Fr=mrRω2 2、沿气缸中心线的总作用力F 总作用力F是缸内气体作用力Fg与往复惯性力的代数和 F=Fg+Fj 气体作用力 D 2 Fg p g - p? g 4
1、活塞位移x:
x ( L R) ( L cos R cos )
2 2
R(1 cos ) L(1 1 sin )
(精确式)
R x R(1 cos ) (1 cos 2 ) x I x II (近似式) 4
近似式与精确式相比误差很小,如当λ =1/3.5时,曲柄转角为 90度时误差为最大,在0.003R左右,此精度在工程上已足够。
பைடு நூலகம்
(精确式)
1 2 L sin 1 1 3 cos2 (近似式) 2
2
在α =90º 或270º 时达到极值:
Le
2 (1 2 )1 / 2
(精确式)
1 (近似式) 2 摆动角速度和角加速度精确式中分母均近似等于 1 ,因此两者均 随α 近似按简谐规律变化。
L L 1 m j m p m 1 m p m l L 作旋转运动的不平衡质量mr,包括曲柄换算质量mk和连杆换算
L1 mr mk m 2 mk1 2mk 2 mL R L
到大头中心的质量m2,集中作用于曲柄销中心,即
三、曲柄连杆机构作用力和力矩 1、惯性力 、 (1)旋转惯性力 (1)、 往复惯性力
2、活塞速度:
sin( ) v R cos
四连杆机构运动分析

四连杆机构运动分析
1、组装零件:
---放置第一个零件常采用缺省;
---连接零件可采用销钉连接方式(机构能运动);
2、进入机构运动环境
---应用程序|机构---
---编辑|重新连接--- /检查装配情况
---运行(连接组件)---是(确认)---
3、观察机构中的体
---视图|加亮主体--- /绿色表示为地体
4、拖动模型
---单击‘拖动’按钮---
---任选四连杆上一点,拖动鼠标进行拖动---
---单击中建,结束拖动---
5、建立伺服电机
---选择‘伺服电动机’按钮---
---定义电机名称,运动轴--- /若装配正确,运动处都会出现
运动轴
---定义电机速度、加速度--- /可单击图像查看
6、仿真运动过程
---单击‘机构分析’按钮---
---选择‘运动学’分析类型,单击‘运行’观察运动情况---
7、回放并保存结果
单击‘回放’按钮可以进行回放;
8、产生分析测量结果
---分析|测量,打开‘测量结果’---
---单击‘新建’按钮(在测量栏中),打开‘测量定义’--- ---选择测量点,测量分量,坐标系---确定---
/测量点可以是零件端点,基准点,几何点
---单击画图,可以绘制结果图形---
9、产生轨迹曲线
---插入|轨迹曲线---
---选择点---确定---
/零件顶点,几何点可以产生轨迹,基准点不能产生轨迹,可以在模型树种中右键零件‘打开’|草绘,绘制几何点;。
连杆机构运动分析指导

连杆机构运动分析指导一、实验目的1. 加强学生对机构组成原理的认识,进一步了解机构组成及其运动特性,为机构创新设计奠定良好的基础。
2. 培养学生连杆机构解析法分析的能力。
二、实验原理机构一般由两部分组成,一部分为机架和原动件及他们之间的运动副,另一部分由其他构件和运动副组成。
其中,前一部分称为基本机构部分,后一部分称为从动件系统。
如图1所示的机构可以分成如图2所示两部分。
两部分机构自由度之和等于原始机构的自由度,由于基本机构的自由度与原动件数目相等,等于机构的自由度,所以从动件系统部分的自由度为0。
在很多情况下,从动件系统可以进一步划分成更小的杆组。
我们把无法再分割的、自由度=0的从动件连接称为阿苏尔杆组(Assur group). 例如如图2的从动件系统可以进一步划分成如图3所示的两个阿苏尔杆组。
在每一个阿苏尔杆组中,杆组内部各构件间连接的运动副称为内部运动副(inner pair内副)。
例如杆组DCB中的转动副C和杆组GFE中的转动副F。
每一个阿苏尔杆组中有一部分运动副与运动已知构件相联,这一部分运动副称为外部运动副(outer pairs外副)。
例如,阿苏尔杆组DCB中的转动副B和D分别和运动已知构件(原动件和机架)相连接,为外副。
阿苏尔杆组DCB通过外副B和D 与运动已知的构件连接后,形成了一个铰链四杆机构ABCD ,杆组DCB中的构件BCE和DC运动确定。
阿苏尔杆组GFE 通过外副E和G与运动已知构件(BCE 和机架)连接。
注意:转动副E不是阿苏尔杆组DCB的一个外副。
从阿苏尔杆组的安装顺序,我们可以看出杆组DCB是第一杆组,杆组GFE 是第二杆组。
我们可以得到机构的组成原理:任何机构都是在基本机构的基础上依次添加杆组扩展而成的。
注意只有在前面的阿苏尔杆组安装完之后,后面的杆组才能安装。
依据机构的组成原理就可以预先编写一些常用阿苏尔杆组的子程序。
这样,多杆连杆机构的运动分析就可以简化成简单的两步:首先,将机构拆成基本机构部分和阿苏尔杆组,然后,根据阿苏尔杆组的类型和装配顺序调用相应的运动分析子程序。
机械原理-平面连杆机构的运动分析和设计

平面连杆机构的设计流程和方法
在这个部分中,我们将深入探讨平面连杆机构的设计,介绍流程和方法,提供实际案例分析,帮助您了解如何设 计成功的机械。
1.
需求分析
将客户的需求转化为机械设计
目标。
2.
构思和设计
基于机械原理构思和设计机械
装备支撑结构,并采用 CAD 软
件实施初始的草图或模型。
3.
材料选择
选择合适的材料和工艺,确保
结构和类型
平面连杆机构通常由零件精细制 造而成,以满足工业和商业目的 的要求。
工程应用
机械工程师们可以使用平面连杆 机构来完成各种复杂的任务,如 发动机和自动化流水线等。
日常应用
平面连杆机构可以进一步应用在 日常用品中,如钟表、洗衣机和 自动售货机等。
平面连杆机构的运动分析方法
在这个部分中,我们将探索平面连杆机构的运动学和动力学,介绍运动方程和速度方程,以及如何用数学 公式计算不同零件的运动和速度。
1 平衡条件
平衡是指物理系统中所有力和运动之间所需达到的状态,这是机械工程师需要考虑的重 要问题。
2 稳定性
稳定性是一个重要的物理学概念,涉及动量、速度和质量,能够帮助工程师在设计平面 连杆机构时考虑不同零件的状态和取向。
3 应用场景
平面连杆机构无处不在,具有开发良好设计的潜力,是自动化流水线的核心,也是钟表、 汽车和机器人的重要部分。
1
运动学
运动学研究物体运动的规律和运动参数,如位移、速度、加速度等。
2
动力学
动力学研究物体的运动状态和运动参数之间的关系,如动量、力和功等。
3
数值模拟
数字计算能够预测机械零件的运动,利用计算机模拟机械过程,提高设计效率。
5连杆机构运动分析
由加速度多边形可见:
aCB =
(aCnB )2 + (aCτ B )2 = lBC
ω
4 2
+
α
2 2
VA
方向垂直于AB的连线,与ω指向一致
同一构件上两点的加速度关系为: aB
=
aA
+
a
n BA
+
a
τ BA
a
n BA
为点B对点A的相对法向加速度
a
τ BA
为点B对点A的相对切向加速度
大小
a
n BA
= ω 2l AB
= VB2A l AB
方向:沿着AB直线的方向,由
大小
a
τ BA
=α
⋅ l AB
方向:垂直AB直线的方向,与
A
D
4
速度多边形的补充概念:
机械原理(苗老师)
b
e
p
c
1、p点为极点,代表速度为零的点;
2、连接点p与其他任意一点的矢量便代表该机构图中的同名点的绝对速度,
其指向是从p指向该点;
3、而连接其他任意两点的矢量便代表该两点在机构图中同名点的相对速度,
其指向与速度的角标相反;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
连杆机构运动分析指导
一、实验目的
1. 加强学生对机构组成原理的认识,进一步了解机构组成及其运动特性,为机构创新设计奠定良好的基础。
2. 培养学生连杆机构解析法分析的能力。
二、实验原理
机构一般由两部分组成,一部分为机架和原动件及他们之间的运动副,另一部分由其他构件和运动副组成。
其中,前一部分称为基本机构部分,后一部分称为从动件系统。
如图1所示的机构可以分成如图2所示两部分。
两部分机构自由度之和等于原始机构的自由度,由于基本机构的自由度与原动件数目相等,等于机构的自由度,所以从动件系统部分的自由度为0。
在很多情况下,从动件系统可以进一步划分成更小的杆组。
我们把无法再分割的、自由度=0的从动件连接称为阿苏尔杆组(Assur group). 例如如图2的从动件系统可以进一步划分成如图3所示的两个阿苏尔杆组。
在每一个阿苏尔杆组中,杆组内部各构件间连接的运动副称为内部运动副(inner pair内副)。
例如杆组DCB中的转动副C和杆组GFE中的转动副F。
每一个阿苏尔杆组中有一部分运动副与运动已知构件相联,这一部分运动副称为外部运动副(outer pairs外副)。
例如,阿苏尔杆组DCB中的转动副B和D分别和运动已知构件(原动件和机架)相连接,为外副。
阿苏尔杆组DCB通过外副B和D 与运动已知的构件连接后,形成了一个铰链四杆机构ABCD ,杆组DCB中的构件BCE和DC运动确定。
阿苏尔杆组GFE 通过外副E和G与运动已知构件(BCE 和机架)连接。
注意:转动副E不是阿苏尔杆组DCB的一个外副。
从阿苏尔杆组的安装顺序,我们可以看出杆组DCB是第一杆组,杆组GFE 是第二杆组。
我们可以得到机构的组成原理:任何机构都是在基本机构的基础上依次添加杆组扩展而成的。
注意只有在前面的阿苏尔杆组安装完之后,后面的杆组才能安装。
依据机构的组成原理就可以预先编写一些常用阿苏尔杆组的子程序。
这样,多杆连杆机构的运动分析就可以简化成简单的两步:首先,将机构拆成基本机构
部分和阿苏尔杆组,然后,根据阿苏尔杆组的类型和装配顺序调用相应的运动分析子程序。
三、实验方法与步骤
图1 图2 图3
1.实验前的准备。
预习本实验,掌握实验原理。
熟悉教师给定的连杆机构;(亦可自己选择并设计一个连杆机构,并画出其机构运动简图)。
让同学初步了解一下True Basic 常用命令及其使用。
编写了学习指导“True Basic 常用命令简介和True Basic 常见出错提示信息”的学习指导,详见“附件Ⅶ”。
掌握机构的组成原理和结构分析。
熟练掌握基本的二级Assur 杆组和Link 杆组的运动分析解析法,了解相应子程序的意义,懂得如何正确调用相应的子程序,详见“附件Ⅷ”——“常用二级阿苏尔杆组及其子程序”。
2.实验步骤:
(1)连杆机构结构分析
先去掉机构中的局部自由度和虚约束;计算机构的自由度,确定原动件;拆分杆组,画在纸上。
编写“图4连杆机构结构分析”的学习指导,详见“附件Ⅰ”。
(2)编写主程序
编写运动分析主程序。
根据选定的机构,编写相应的连杆机构运动分析主程序。
为此,编写了“图4连杆机构计算程序”的学习指导,祥见“附件Ⅱ”。
编写动画主程序。
根据选定的机构,编写相应的连杆机构动画主程序。
为此,编写了“图4连杆机构动画程序”的学习指导,详见“附件Ⅲ”。
编写绘制从动件位移、速度、加速度线图的主程序。
为此,编写了“在TB 中绘制SVA三曲线”的学习指导,详见“附件Ⅳ”。
编制将从动件位移、速度、加速度线图转化成相应.scr文件的主程序,详见“附件Ⅴ”——“在ACAD中绘制SV A三曲线”。
(3)上机调试
上机调试,并将结果输出。
调试并运行连杆机构运动分析主程序,然后将计算结果的具体数值以文件的形式保存起来(参见附件Ⅵ——“如何将TRUE BASIC 的输出数值打印出来”,“如何将TRUE BASIC 的输出数值存为文件”,“如何在Excel调用数值并画出曲线”),以备检查。
调试并运行连杆机构动画主程序检查运动分析是否存在明显的错误,以检验机构位置分析是否正确。
调试并运行绘制从动件位移、速度、加速度线图的主程序,以检验从动件的速度和加速度是否正确,进行进一步的检查,看看是否位移达到极值时,速度为0,速度达到极值时,加速度为0。
调试并运行将从动件位移、速度、加速度线图转化成相应.scr文件的主程序,然后将.scr文件在AUTOCAD中打开,获得从动件位移、速度、加速度三线图,并加画相应的坐标轴与坐标。
为此,编写了“在ACAD中绘制SVA三曲线”的实验学习指导,详见“附件Ⅴ”。
3.编写实验报告。