多点约束在模型处理与有限元分析中的应用
基于多点约束法的鼓式制动器有限元分析

Ke y w o r d s : F l o a t i n g b r a k e , Mu l t i - p o i n t c o n s t r a i n t s( MP C) , L o a d i n g s t a t u s , F E a n a l y s i s
r e l f e c t l o a d b e a r i n g S t a t u s o f f ic r t i o n d i s c t h a n t h a t c r e a t e d b y t r a d i t i o n a l me t h o d ,a n d t h e r e s u l t o f b r a k i n g t o r q u e s i mu l a t i o n i s mo r e c o n s i s t e n t w i t h t e s t d a t a . B r a k i n g p e f r o r ma n c e a n d s t r e s s d i s t i r b u t i o n o f f i r c t i o n d i s c o f t h e b r a k e wa s s i mu l a t e d b y t h i s mo d e l a n d t h e r e s u l t s h o w e d t h a t t h e r a d i a l l f o a t i n g d u m r b r a k e c a n h e l p i mp r o v i n g t h e b r a k e d e v i a t i o n a n d t h e f o r c e s t a t u s o f l e a d i n g s h o e ,e n h a n c i n g t h e un r n i n g s a f e t y a n d w e a r a b i l i t y o f t h e l e a d i n g s h o e .B u t u n i f o r mi t y o f t h e f o r c e d s t a t u s o f t r a i l i n g s h o e s n e e d t o b e i mp r o v e d .
abaqus——MPC问题多点约束解析

6.MPC—多点约束1.1 MPC定义MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。
简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT等,具体的使用根据计算模型来定,MPC类型如图6-1所示。
图6-1 NASTRAN中MPC类型1.2 MPC使用范围这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。
从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。
如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。
其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。
如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。
但其变形非常小,和柔软元件比,它是“刚性”的。
这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。
原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。
为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型。
2)在不同类型的单元间传递载荷。
如在有限元模型中,包含三维实体单元和壳体单元。
模型看来成功,没什么问题。
Ansys多点约束技术的应用

第23卷 第2期2007年2月甘肃科技Gansu Science and TechnologyV ol.23 N o.2Feb. 2007 Ansys多点约束技术的应用张会杰1,祝 兵1,高 飞2(1.西南交通大学,四川成都610031;2.邓州市建设局,河南邓州474150)摘 要:介绍Ansys内置的多点约束在有限元单元连接及几何约束中的应用。
关键词:多点约束,单元连接,几何约束中图分类号:T U201.4 空间有限元程序Ansys已经在我们的设计、研究中发挥了重要作用,其中建立模型是有限元分析的一个基础工作;如果对力学模型没有做到正确的模拟,后续的分网、加载、求解将失去意义。
不同单元的连接在建模中是常用而且容易出现问题的环节,本文探讨了Ansys的多点约束技术在不同单元连接中的应用。
1 多点约束(MPC)技术的比较优势多点约束与传统方法相比方便了不同单元的组装,结合粘结接触技术使用可以定义多种单元连接和几何约束:3实体-实体连接:接触、目标面附着在实体单元表面;3壳-壳连接:接触、目标面附着在壳单元表面;3壳-实体连接:接触面和目标面分别附着在壳与实体单元;3梁-实体(壳)连接:梁端节点作为主节点通过刚体面位移约束或力分配面约束的形式连接实体、壳单元接触面上的从节点;3刚体面位移约束:接触点位移和主节点所定义的刚体运动保持一致;3力分配面约束:施加在主节点上的力或位移通过形函数分配到从节点。
这种内置的多点约束方法克服了传统连接算法和ansys其他多点约束工具的缺点,如:3删除接触节点的相关自由度,节省了计算资源;3无需输入接触节点的刚度。
对小变形问题,方程(组)不作循环求解,反应线性行为;对大变形问题,M PC方程进行循环迭代求解。
这从根本上克服了传统约束方法中对小应变的限制。
3线位移和角位移都能约束;3定义连接对单元,方便了约束;3在约束中自动考虑形函数。
力分配面约束时,高阶单元和轴对称单元不需输入权重系数;并可对主节点同时施加力、位移2 MPC的应用设置conta单元的keyopt(2)选项以指定使用M PC,接触单元必须设置的选项有keyopt(2)、keyopt(12)、keyopt(4);然后定义conta单元和targe单元组成“连接对”。
MPC—多点约束
MPC—多点约束MPC定义:MPC(Multi-point constrain;在不同的求解器模版下可以在patran中定义不同;MPC使用范围;这里提请大家注意的是,MPC建立的是多点约束关系;1)描述非常刚硬的结构单元;2)在不同类型的单元间传递载荷;3)任意方向的约束;4)刚性连杆;MPC—多点约束(SPC单点约束对应)MPC定义MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。
简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
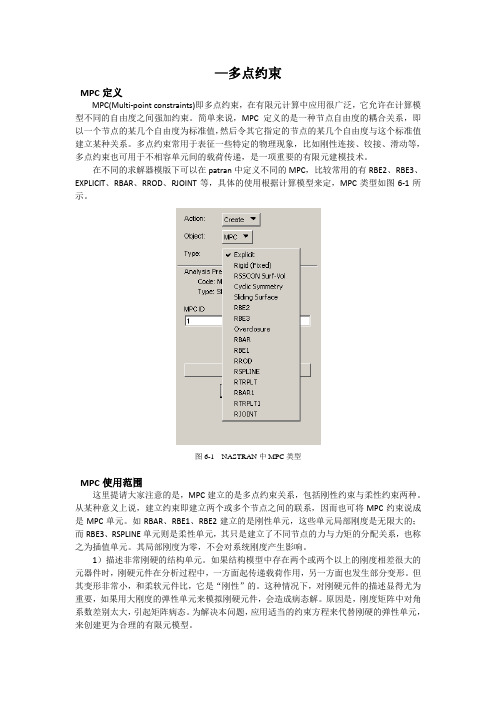
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RB AR、RROD、RJOINT等,具体的使用根据计算模型来定。
MPC使用范围这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。
从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。
如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。
其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。
如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。
但其变形非常小,和柔软元件比,它是“刚性”的。
这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。
有限元MPC问题多点约束
6.MPC—多点约束1.1 MPC定义MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。
简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
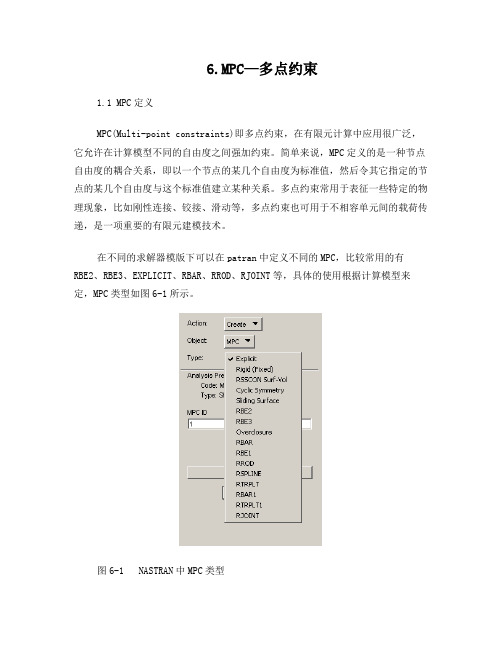
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT等,具体的使用根据计算模型来定,MPC类型如图6-1所示。
图6-1 NASTRAN中MPC类型1.2 MPC使用范围这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。
从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。
如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。
其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。
如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。
但其变形非常小,和柔软元件比,它是“刚性”的。
这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。
原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。
为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型。
2)在不同类型的单元间传递载荷。
如在有限元模型中,包含三维实体单元和壳体单元。
模型看来成功,没什么问题。
mpc

3。任意方向的约束。当某节点可以沿着不平行于坐标轴的某个边界运动时,就需要定义一个约束方程,这个方程反映垂直于此边界的运动的约束
4。刚性连杆
A:多点约束(MPC,Multi-Point Constraint)是对节点的一种约束,即将某节点的依赖自由度定义为其它若干节点独立自由度的函数。例如,将节点1的X方向位移定义为节点2、节点3和节点4X方向位移的函数。
A:RBAR:表示刚性连接两个网格节点。
属性:
1、最大的共同点就是把所有的非独立自由度固定在一个网格上,把所有的独立自由度固定在其他网格上。
2、在网格间混合或者匹配非独立的自由度,但是使用的非常少。
3、这些独立自由度必须能够描述刚体单元的运动。
使用举例:
1、"焊接"两个模型到一起。
[quote][b]jstj2000 wrote:[/b]
建议你用梁单元试试,在梁的材料属性定义里,将端点的一个转动自由度释放
在操作对话框,【Pinned DOFs ◎ Node 1/2】输入要释放的自由度,这样可以模拟铰链连接。
[/quote]
这样的话,只能释放一个自由度,如果我要释放旋转的三个自由度,那怎么解决?谢谢。
1。描述非常刚硬的结构单元。假定结构模型中包括一个或多个比其他元件硬得多的元件,如汽车模型中的发动机,这时候刚硬元件可以传递载荷,但它的变形要小的多,和柔软元件比,它是“刚性”的。如果用大刚度的弹性单元模拟刚硬单元,会造成病态解,原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。研究指出,应该用适当的约束方程来代替刚硬的弹性单元,以创建更为合理的有限元模型。
这个问题我是这样认为的:
如果你用rod单元,那么它本身就是铰支的。
abaqus——MPC问题多点约束解析
—多点约束MPC定义MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。
简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT等,具体的使用根据计算模型来定,MPC类型如图6-1所示。
图6-1 NASTRAN中MPC类型MPC使用范围这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。
从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。
如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。
其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。
如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。
但其变形非常小,和柔软元件比,它是“刚性”的。
这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。
原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。
为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型。
2)在不同类型的单元间传递载荷。
如在有限元模型中,包含三维实体单元和壳体单元。
模型看来成功,没什么问题。
但是求解是,会出现“刚度矩阵奇异”的错误。
abaqus——MPC问题多点约束解析
abaqus——MPC问题多点约束解析6.MPC—多点约束1.1 MPC定义MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。
简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT等,具体的使用根据计算模型来定,MPC类型如图6-1所示。
图6-1 NASTRAN中MPC类型1.2 MPC使用范围这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。
从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。
如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。
其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。
如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。
但其变形非常小,和柔软元件比,它是“刚性”的。
这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。
原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。
为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型。
2)在不同类型的单元间传递载荷。
如在有限元模型中,包含三维实体单元和壳体单元。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多点约束在模型处理与有限元分析中的应用
作者:天纳克汽车工业有限公司周新代智军
摘要:本文以MSC.Nastran为工具,研究了多点约束在复杂网格模型处理中的应用,并以此为基础对某柴油机后处理装置进行了有限元分析,得出多点约束在网格模型处理以及求解精度、求解策略与计算时间的节省上能够发挥很大作用,该处理方式对模型简化与复杂问题求解有实际指导意义。
关键词:多点约束;模型处理;后处理装置;有限元分析
1 引言
对于有限元分析工作者来说,网格划分与模型前处理占据了大部分时间。
通常对于简单模型,不同部件之间一般通过节点共用来连接。
然而对于复杂模型,不同部件之间如果仍然运用节点共用的方式进行连接,网格划分将变得异常艰难,有时候甚至不可能。
在Abaqus中可以采用接触的方式来定义各部件之间的关系,但是接触的方式如tie 绑定这一关键词会增加面的刚度,而且在模型中如果应用了接触,结果的分析是非线性的,非线性分析收敛性问题也一直是摆在工程师面前的一个难题。
对于非线性求解,如果模型比较大时,计算时间将非常长。
Nastran 中MPC(Multi-Points-Constraint 多点约束)这一关键词能够很好解决上述问题,MPC 通过多点约束将不同的节点进行耦合,在MPC 内部合力为零,其不会增加结构的刚度,并且运用MPC 将各部件连接,其分析计算仍然可以是线性的,大大节省了计算时间。
本论文正是基于上述复杂模型建模的难点以及非线性计算时间长,对模型的网格处理进行了研究。
模型处理过程中,将Abaqus中的接触对转化为Nastran 中的MPC,实现复杂模型不同部件之间网格的连接,将非线性问题线性化。
2 有限元分析
2.1 实例模型分析
如图1 所示为一个支架与圆筒壳体有限元模型,支架与壳体的材料均为SS409。
有限元网格模型共有节点15046 个,单元13218 个。
在Abaqus中先定义了支架与筒体的tie 接触,然后通过自编程序进行格式转化,将接触对转化成了Nastran 中的MPC。
图1 有限元模型(左:Abaqus接触模型;右:Nastran 多点约束模型)
为了比较不同的模型处理方式对结果的影响,对三种不同的连接方式进行了模态分析,模态分析结果见表1:
表1 支架筒体模态分析结果
由表1 可知,三种模型处理方式的各阶模态值相差不大,其中Nastran 中多点约束结果与节点共用的结果更加接近,通过接触对计算的结果略大,这也验证了前面所述某些接触约束会增加接触面的刚度,造成结果值偏大。
2.2 柴油机后处理系统有限元分析
如图2为某柴油机后处理排气系统有限元模型。
整个有限元模型共有单元132058个,节点155815个。
对于该系统而言,其模型相当复杂,零部件个数比较多,而且很多部件形状不规则。
在模型的处理中选择了前面提到的先在Abaqus中不同部件间定义接触对,然后通过模型格式转化,将接触对转化为Nastran中的MPC,整个模型共定义了18对接触对,相应转化成了18个MPC。
图2 柴油机后处理系统有限元模型
为了考察路面激励对柴油机后处理系统的动态响应,对系统进行耐久性评估,在后处理系统支架上输入了如图3 所示位移激励:
如图4 为柴油机后处理系统承受图3 所示位移激励后的位移响应云图,其中Y 方向的响应最大,最大响应为22mm,最大响应的位置在波纹管的出口端。
如图5 为柴油机后处理系
统承受位移激励后的应力云图,其中最大等效应力为104MPa,最大均方值应力为43MPa,最大应力位置发生在内外腔的点焊连接处。
图4 X,Y,Z 三方向位移响应云图
图5 等效应力与均方值应力云图
3 结论
本文对复杂零部件不同部件之间的连接进行了分析比较。
分析表明:Nastran 中MPC 可以有效解决零部件之间的网格对应关系,相比接触对连接,其不增加连接面的刚度,且可以将复杂的非线性分析转化成线性求解。
该方法的成功应用,能够为复杂模型的简化与求解节省大量计算时间,具有实际意义。
4 参考文献
[1]李军毅钱纯等编著大型通用有限元程序系统MSC. NASTRAN 基础培训教材
1999.5(end)。