《工程施工测量》坐标计算
测量坐标计算范文

测量坐标计算范文
接下来,平差计算是用于确定未知点的最佳估计值的过程。
在平差计
算中,需要建立一个数学模型,以描述控制点和未知点之间的关系。
这通
常采用最小二乘法进行求解。
平差计算的目标是通过最小化观测值与估计
值之间的残差,来得到最佳的未知点坐标估计。
在平差计算中,还需要考
虑精度评定和可靠性分析等。
最后,坐标计算是根据已知的控制点和已经计算出的平差值,求解出
未知点的坐标。
坐标计算通常包括水平坐标和垂直坐标两个方面。
水平坐
标计算主要涉及到平面坐标系的坐标转换和计算,垂直坐标计算则涉及到
高程的转换和计算。
常用的坐标系统包括地理坐标系、投影坐标系和高程
坐标系等。
在测量坐标计算过程中,需要考虑一些因素和技术,以确保计算结果
的准确性。
例如,需要考虑大地椭球模型和大地水准面模型,以及相应的
转换参数。
同时,还需要考虑潜在的误差源,如仪器误差、观测误差和数
据处理误差等。
为了提高计算效率和准确性,还可以采用一些常用的技术,如差分平差、间接平差、模型参数估计和同步辅助观测等。
综上所述,测量坐标计算是一项复杂且关键的技术,它是实现地理信
息系统和测量应用的基础。
通过合理的数据处理、平差计算和坐标计算,
可以得到准确可靠的坐标结果,为各种工程和科学应用提供支持。
在实际
应用中,还需要与其他相关技术和数据配合使用,以实现更广泛的功能和
应用。
用全站仪进行工程(公路)施工放样、坐标计算
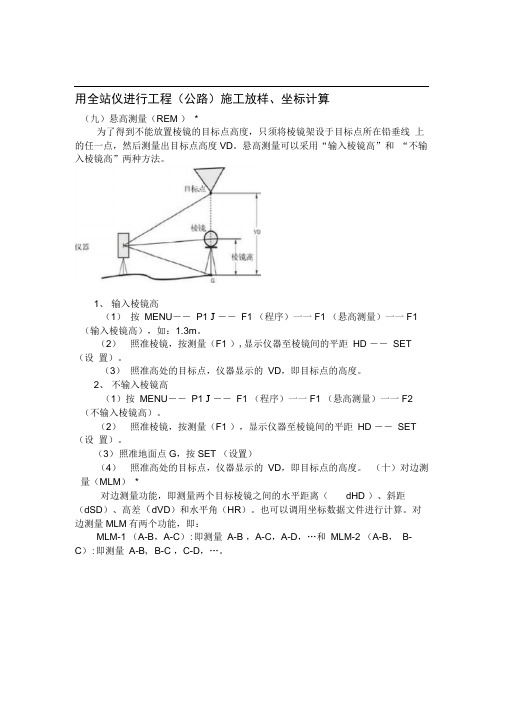
用全站仪进行工程(公路)施工放样、坐标计算(九)悬高测量(REM ) *为了得到不能放置棱镜的目标点高度,只须将棱镜架设于目标点所在铅垂线 上的任一点,然后测量出目标点高度VD 。
悬高测量可以采用“输入棱镜高”和 “不输入棱镜高”两种方法。
1、 输入棱镜高(1) 按 MENU ―― P1 J ―― F1 (程序)一一F1 (悬高测量)一一F1(输入棱镜高),如:1.3m 。
(2) 照准棱镜,按测量(F1 ),显示仪器至棱镜间的平距 HD ―― SET(设 置)。
(3) 照准高处的目标点,仪器显示的 VD ,即目标点的高度。
2、 不输入棱镜高(1)按 MENU ―― P1 J ―― F1 (程序)一一F1 (悬高测量)一一F2(不输入棱镜高)。
(2) 照准棱镜,按测量(F1 ),显示仪器至棱镜间的平距 HD ―― SET(设 置)。
(3) 照准地面点G ,按SET (设置)(4) 照准高处的目标点,仪器显示的 VD ,即目标点的高度。
(十)对边测量(MLM ) *对边测量功能,即测量两个目标棱镜之间的水平距离( dHD )、斜距(dSD )、高差(dVD )和水平角(HR )。
也可以调用坐标数据文件进行计算。
对边测量MLM 有两个功能,即:MLM-1 (A-B ,A-C ):即测量 A-B ,A-C ,A-D ,…和 MLM-2 (A-B , B-C ):即测量 A-B , B-C ,C-D,…。
以 MLM-1 ( A-B , A-C )为例,1、 按MEN P1 J ――程序(F1 )――对边测量(F2 )――不使 用文件(F2)―― F2 (不使用格网因子)或F1 (使用格网因子)一一MLM-1(A-B ,A-C )( F1 )02、 照准A 点的棱镜,按测量(F1),显示仪器至A 点的平距HD ―― SET (设置)3、 照准B 点的棱镜,按测量(F1),显示A 与B 点间的平距dHD 和高 差 dVDo4、照准C 点的棱镜,按测量(F1),显示A 与C 点间的平距dHD 和高 差dVD …,按丄,可显示斜距。
测量坐标和施工坐标的换算公式表

测量坐标和施工坐标的换算公式表1. 前言测量坐标和施工坐标是在建筑、土木工程等领域中常见的概念。
测量坐标是指利用测量仪器进行测量所得到的坐标,通常用于确定建筑物或者工程项目中各个点的空间位置。
而施工坐标则是依据设计图纸上的坐标信息进行施工的坐标系统。
在实际应用中,常常需要将测量坐标转换为施工坐标,或者将施工坐标转换为测量坐标。
本文将介绍常见的测量坐标和施工坐标的换算公式表,以便工程人员进行参考和使用。
2. 测量坐标和施工坐标的定义在开始介绍具体的换算公式之前,我们先来了解一下测量坐标和施工坐标的定义。
•测量坐标:测量坐标是通过测量仪器进行测量得到的坐标值。
测量仪器可以是全站仪、经纬仪、测距仪等。
测量坐标通常用于确定建筑或工程项目中各个点的空间位置。
•施工坐标:施工坐标是根据设计图纸上的坐标信息确定的坐标系统。
施工坐标用于指导施工人员进行具体的施工操作。
3. 测量坐标和施工坐标的换算公式表下面是常见的测量坐标和施工坐标的换算公式表:坐标类型公式描述测量坐标→ 施工坐标Xg = Xm +ΔXXg为施工坐标,Xm为测量坐标,ΔX为坐标转换量测量坐标→ 施工坐标Yg = Ym +ΔYYg为施工坐标,Ym为测量坐标,ΔY为坐标转换量施工坐标→ 测量坐标Xm = Xg -ΔXXm为测量坐标,Xg为施工坐标,ΔX为坐标转换量施工坐标→ 测量坐标Ym = Yg -ΔYYm为测量坐标,Yg为施工坐标,ΔY为坐标转换量4. 换算公式的应用示例下面举例说明如何应用上述换算公式进行坐标转换:假设某工程项目的设计图纸上给出了某一点的施工坐标为Xg=100.5m,Yg=75.2m,现在需要将其转换为测量坐标。
根据公式,我们可以计算出坐标转换量为ΔX=0.3m,ΔY=0.2m。
将这些值代入公式,得到测量坐标为:Xm = 100.5 - 0.3 = 100.2m Ym = 75.2 - 0.2 = 75.0m因此,该点的测量坐标为Xm=100.2m,Ym=75.0m。
施工坐标和测量坐标怎么转换

施工坐标和测量坐标怎么转换在建筑、工程和测绘领域中,施工坐标和测量坐标是两个常见的坐标系统。
施工坐标指的是建筑或工程项目实际施工时使用的坐标系统,用于确定各个建筑构件的位置和相互关系。
而测量坐标则是测绘人员在进行测量过程中使用的坐标系统,用于记录和描述地物的位置和形状。
由于施工坐标和测量坐标常常需要进行转换,以满足不同需求,因此了解如何进行转换是非常重要的。
下面将介绍施工坐标和测量坐标之间的转换方法。
1. 施工坐标转测量坐标施工坐标转测量坐标是将实际施工过程中使用的坐标系统转换为测量过程中使用的坐标系统。
这种转换通常在测绘人员进行实地测量时进行。
方法一:平移法平移法是最常用的施工坐标转测量坐标的方法之一。
具体步骤如下:1.选择一个已知的测量点,假设其施工坐标为(A, B)。
2.在该测量点上设置一个测量标志物,并记录其测量坐标为(X, Y)。
3.通过测量仪器,测量其他建筑构件的施工坐标。
4.计算其他建筑构件的测量坐标。
–假设需要转换的构件的施工坐标为(X1, Y1),则其测量坐标可通过以下公式计算得出:X_测量 = X_标志物 + (X1 - X_施工) 和 Y_测量 =Y_标志物 + (Y1 - Y_施工)。
通过以上步骤,就可以将施工坐标转换为测量坐标。
方法二:坐标系旋转法坐标系旋转法是另一种常用的施工坐标转测量坐标的方法。
它适用于施工现场的坐标系与测量坐标系之间存在旋转关系的情况。
具体步骤如下:1.确定旋转角度和旋转中心。
2.将旋转中心移动到坐标原点。
3.通过逆时针旋转的方式,将施工坐标系旋转到与测量坐标系平行的位置。
4.计算旋转后的建筑构件的测量坐标。
–假设需要转换的构件的施工坐标为(X1, Y1),则其测量坐标可通过以下公式计算得出:X_测量= X1 * cosθ - Y1 * sinθ 和 Y_测量 = X1 *sinθ + Y1 * cosθ。
–其中,θ表示旋转角度。
通过以上步骤,就可以将施工坐标转换为测量坐标。
施工坐标与测量坐标的换算有哪几种方法

施工坐标与测量坐标的换算有哪几种方法在工程建设领域,施工坐标与测量坐标是两个常用的坐标系统。
施工坐标通常用于指导施工作业,而测量坐标则用于测量和记录实际地理位置。
在实际工作中,经常需要进行施工坐标与测量坐标之间的换算。
下面将介绍几种常见的换算方法。
1. 坐标转换法坐标转换法是最常用的施工坐标与测量坐标换算方法之一。
该方法通过坐标系之间的线性变换关系,将施工坐标转换为测量坐标。
需要注意的是,坐标转换法需要有已知的参考点,并且参考点的坐标在两个坐标系中是已知的。
通过测量这些参考点在两个坐标系中的坐标,可以建立转换参数,再根据转换参数将施工坐标转换为测量坐标。
2. 矩阵变换法矩阵变换法是另一种常用的施工坐标与测量坐标换算方法。
该方法通过矩阵运算将施工坐标转换为测量坐标。
具体步骤包括建立坐标转换矩阵、计算矩阵的逆矩阵以及矩阵乘法运算。
通过这一系列运算,可以将施工坐标转换为测量坐标。
需要注意的是,矩阵变换法也需要有已知的参考点,并且参考点的坐标在两个坐标系中是已知的。
3. 转角测量法转角测量法是一种基于测量方位角的换算方法。
方位角是指物体或点相对于某一参考方向的角度。
在转角测量法中,先测量施工坐标系和测量坐标系中的方位角,并记录下来。
然后根据两个方位角的差值,求得转角。
最后根据转角和已知参考点的坐标,通过三角函数的计算,将施工坐标转换为测量坐标。
4. 公式换算法公式换算法是一种基于数学公式的换算方法。
通过已知的数学公式,将施工坐标与测量坐标进行相互转换。
具体的换算公式根据不同的坐标系和工程要求而定,可以是简单的线性变换公式,也可以是复杂的非线性变换公式。
使用公式换算法的关键是找到适合的公式,并确保公式的准确性和可靠性。
5. 特殊换算法除了上述常见的换算方法之外,根据具体的工程要求,还可以使用一些特殊的换算方法。
这些特殊的换算方法通常与特定的应用领域相关,比如大地坐标系到平面坐标系的换算、高斯投影坐标系到经纬度坐标系的换算等。
施工坐标计算公式
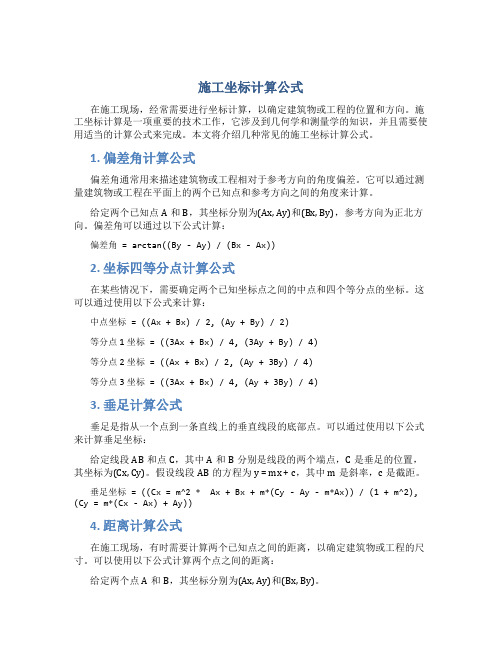
施工坐标计算公式在施工现场,经常需要进行坐标计算,以确定建筑物或工程的位置和方向。
施工坐标计算是一项重要的技术工作,它涉及到几何学和测量学的知识,并且需要使用适当的计算公式来完成。
本文将介绍几种常见的施工坐标计算公式。
1. 偏差角计算公式偏差角通常用来描述建筑物或工程相对于参考方向的角度偏差。
它可以通过测量建筑物或工程在平面上的两个已知点和参考方向之间的角度来计算。
给定两个已知点A和B,其坐标分别为(Ax, Ay)和(Bx, By),参考方向为正北方向。
偏差角可以通过以下公式计算:偏差角 = arctan((By - Ay) / (Bx - Ax))2. 坐标四等分点计算公式在某些情况下,需要确定两个已知坐标点之间的中点和四个等分点的坐标。
这可以通过使用以下公式来计算:中点坐标 = ((Ax + Bx) / 2, (Ay + By) / 2)等分点1坐标 = ((3Ax + Bx) / 4, (3Ay + By) / 4)等分点2坐标 = ((Ax + Bx) / 2, (Ay + 3By) / 4)等分点3坐标 = ((3Ax + Bx) / 4, (Ay + 3By) / 4)3. 垂足计算公式垂足是指从一个点到一条直线上的垂直线段的底部点。
可以通过使用以下公式来计算垂足坐标:给定线段AB和点C,其中A和B分别是线段的两个端点,C是垂足的位置,其坐标为(Cx, Cy)。
假设线段AB的方程为y = mx + c,其中m是斜率,c是截距。
垂足坐标 = ((Cx = m^2 * Ax + Bx + m*(Cy - Ay - m*Ax)) / (1 + m^2), (Cy = m*(Cx - Ax) + Ay))4. 距离计算公式在施工现场,有时需要计算两个已知点之间的距离,以确定建筑物或工程的尺寸。
可以使用以下公式计算两个点之间的距离:给定两个点A和B,其坐标分别为(Ax, Ay)和(Bx, By)。
工程施工_坐标_定位方法

在现代建筑工程中,精确的工程施工定位和坐标测量放线是保证工程质量、进度和成本控制的关键环节。
本文将详细介绍工程施工定位和坐标放线的相关方法。
一、工程施工定位方法1. 平面控制网建立为保证工程测量的统一性和连续性,建立统一的平面控制网是必要的。
平面控制网分为场区整体控制网和分区工程施工控制网。
场区整体控制网应覆盖整个工程区域,而分区控制网则根据工程分部、分项的需要进行设置。
2. 高程控制网建立高程控制网的建立应与平面控制网相结合,以确保工程的高程精度。
高程控制网可分为场区整体高程控制网和分区高程控制网。
场区整体高程控制网应为一个闭合系统,而分区高程控制网则可根据工程需要设置。
3. 施工定位方法(1)采用全站仪测量法:全站仪测量法是一种集光、电、磁于一体的现代化测量仪器。
通过全站仪测定建筑物的轴线与已知控制点之间的角度和距离,从而确定建筑物的位置。
(2)采用GPS测量法:全球定位系统(GPS)是一种高精度、全时段的定位技术。
通过在工程区域设置若干个GPS基准站,接收卫星信号,计算出工程部位的坐标。
(3)采用激光测距法:激光测距法具有测距速度快、精度高、不受天气影响等优点。
通过激光测距仪测定建筑物轴线与已知控制点之间的距离,从而实现施工定位。
二、坐标放线方法1. 数字化测量控制技术数字化测量控制技术是一种基于计算机技术的测量方法。
通过将设计图纸与实际工程现场相结合,利用专业软件进行坐标放线,提高放线效率和精度。
2. 传统测量放线方法(1)采用尺量法:通过钢尺直接测量建筑物轴线与已知控制点之间的距离和角度,从而确定建筑物的位置。
(2)采用光学测量法:利用经纬仪、水准仪等光学仪器测定建筑物轴线与已知控制点之间的角度和距离,实现坐标放线。
3. 现代测量放线方法(1)采用全站仪坐标放线:通过全站仪测定建筑物轴线与已知控制点之间的角度和距离,利用坐标转换公式计算出建筑物的坐标,实现坐标放线。
(2)采用激光扫描放线:利用激光扫描仪对建筑物进行三维扫描,获取建筑物的空间坐标,再利用专业软件进行坐标放线。
施工坐标换算方法有哪些
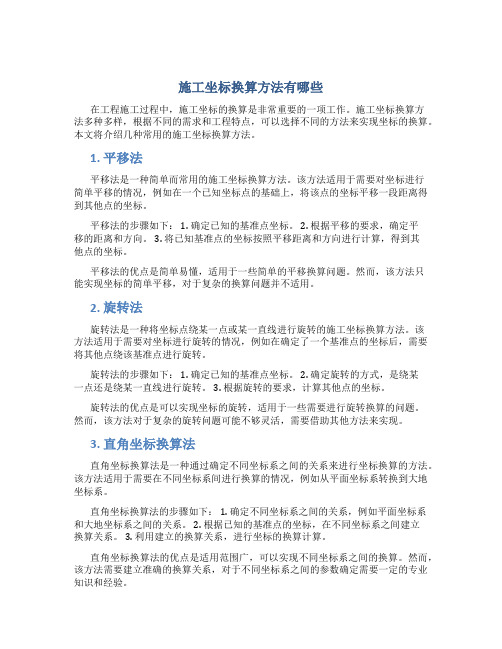
施工坐标换算方法有哪些在工程施工过程中,施工坐标的换算是非常重要的一项工作。
施工坐标换算方法多种多样,根据不同的需求和工程特点,可以选择不同的方法来实现坐标的换算。
本文将介绍几种常用的施工坐标换算方法。
1. 平移法平移法是一种简单而常用的施工坐标换算方法。
该方法适用于需要对坐标进行简单平移的情况,例如在一个已知坐标点的基础上,将该点的坐标平移一段距离得到其他点的坐标。
平移法的步骤如下: 1. 确定已知的基准点坐标。
2. 根据平移的要求,确定平移的距离和方向。
3. 将已知基准点的坐标按照平移距离和方向进行计算,得到其他点的坐标。
平移法的优点是简单易懂,适用于一些简单的平移换算问题。
然而,该方法只能实现坐标的简单平移,对于复杂的换算问题并不适用。
2. 旋转法旋转法是一种将坐标点绕某一点或某一直线进行旋转的施工坐标换算方法。
该方法适用于需要对坐标进行旋转的情况,例如在确定了一个基准点的坐标后,需要将其他点绕该基准点进行旋转。
旋转法的步骤如下: 1. 确定已知的基准点坐标。
2. 确定旋转的方式,是绕某一点还是绕某一直线进行旋转。
3. 根据旋转的要求,计算其他点的坐标。
旋转法的优点是可以实现坐标的旋转,适用于一些需要进行旋转换算的问题。
然而,该方法对于复杂的旋转问题可能不够灵活,需要借助其他方法来实现。
3. 直角坐标换算法直角坐标换算法是一种通过确定不同坐标系之间的关系来进行坐标换算的方法。
该方法适用于需要在不同坐标系间进行换算的情况,例如从平面坐标系转换到大地坐标系。
直角坐标换算法的步骤如下: 1. 确定不同坐标系之间的关系,例如平面坐标系和大地坐标系之间的关系。
2. 根据已知的基准点的坐标,在不同坐标系之间建立换算关系。
3. 利用建立的换算关系,进行坐标的换算计算。
直角坐标换算法的优点是适用范围广,可以实现不同坐标系之间的换算。
然而,该方法需要建立准确的换算关系,对于不同坐标系之间的参数确定需要一定的专业知识和经验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Y坐标 501249.135 501315.118 501318.226 501252.463
点号 M1
L1 L1
X坐标 3254680.754 3254666.398
Y坐标 501192.344 501281.113
极坐标法——坐标放样
以A3房角为例
点号 M1
X坐标 3254680.754
Y坐标 501192.344
②象限角
R arctan y 39 4347 x
极坐标法——坐标放样
以A3房角为例
点号 M1
X坐标 3254680.754
Y坐标 501192.344
L1 3254666.398 501281.113 A3 3254749.087 501249.135
A3
D
β
L1
2.计算β角(∠AML)
2.1分别计算方位角: M 1 A3
极坐标法——坐标放样
以A3房角为例
点号 M1
X坐标 3254680.754
Y坐标 501192.344
L1 3254666.398 501281.113 A3 3254749.087 501249.135
A3
D
β
L1
M1
2.计算β角(∠AML)
2.1分别计算方位角: M 1 A3
M 1L1
①坐标增量 xM1A3 xA3 xM1 68.333 yM1A3 yA3 yM 1 56.791
最新版
《施工测量》 备课课件
第五讲:坐标放样
建筑物定位:将建 筑物的外廓(墙) 轴线交点(简称角 桩)测设到地面上。
任务行动领域:完成新建办公楼的建筑物定位工作
办公楼
极坐标法——坐标放样
办公楼
E3
E14
A3 D
β
M1
坐标
A14
D,β
点号 A3 A14 E14 E3
X坐标 3254749.087 3254739.309 3254758.864 3254770.024
A3
D
β
L1
M1
2.计算β角(∠AML)
2.1分别计算方位角: M 1 A3
M 1L1
练习:
计算方位角 M1L1 ? M1L1 9901281.113 A3 3254749.087 501249.135
A3
D
β
L1
M1
1.计算测站点M1至A3房角点 水平距离
xM1A3 xA3 xM1 68.333 yM1A3 yA3 yM1 56.791
DM1A3 xM2 1A3 y2M1A3 88.852
M 1L1
③方位角 M 1 A3
△x △y 象限
+
+
Ⅰ
-
+
Ⅱ
-
-
Ⅲ
+
-
Ⅳ
M1
M 1 A3 39 4347
极坐标法——坐标放样
以A3房角为例
点号 M1
X坐标 3254680.754
Y坐标 501192.344
L1 3254666.398 501281.113 A3 3254749.087 501249.135