哈工大系统辨识实验一教材
(哈工大)系统辨识与自适应控制——第一讲..
第一讲 系统辨识的基本概念
一、什么是系统辨识?
1. 机理分析建模方法 (白箱法)
图1 单级倒立摆实验装置 2010-02-20 控制理论与制导技术研究中心 第2 页
Harbin Institute of Technology– HIT
m
u
M
F
r
O
图2 单级倒立摆示意图 2010-02-20 控制理论与制导技术研究中心 第3 页
Harbin Institute of Technology– HIT
图中所示变量名的物理含义如表1所示。
2010-02-20
控制理论与制导技术研究中心
第4 页
Harbin Institute of Technology– HIT
步骤一:对小车进行受力分析,小车的受力分析如图3所 P 示。
u M
N
F
r
图3 小车受力分析图
图中,P表示摆杆对小车水平方向上的作用力,单位N; N 表示摆杆对小车垂直方向上的作用力,单位(N)。 根据牛顿定律,小车水平方向上的力平衡方程为:
2010-02-20 控制理论与制导技术研究中心 第5 页
Harbin Institute of Technology– HIT
步骤四:化成状态空间描述。
1 x 2 x 2 m 2 l 2 x2 cos x1 sin x1 m lucos x1 x 4 m l cos x1 ( M m)m glsin x1 ( M m) fx2 x 2 ( M m)(J m l2 ) m 2 l 2 cos2 x1 3 x4 x 2 m lfx2 cos x1 m 2 l 2 g sin x1 cos x1 ( J m l2 ) x 4 ( J m l2 )m lx2 sin x1 ( J m l2 )u 4 x ( M m)(J m l2 ) m 2 l 2 cos2 x1
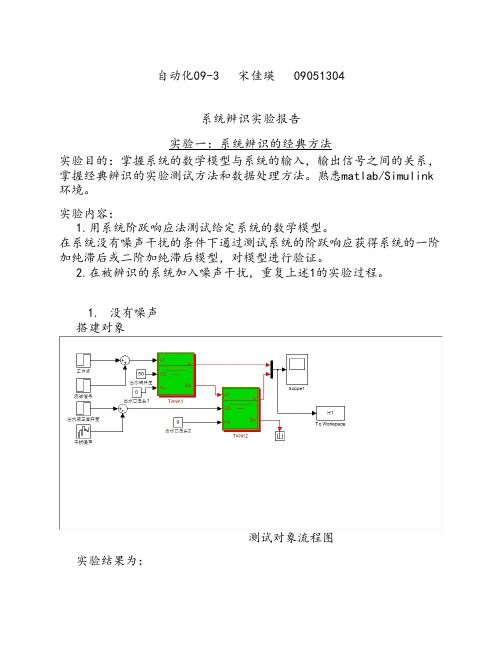
系统辨识实验报告
i=1:800; figure(1) plot(i,Theta(1,:),i,Theta(2,:),i,Theta(3,:),i,Theta(4,:),i,Theta(5,:),i,T title('待估参数过渡过程') figure(2) plot(i,Pstore(1,:),i,Pstore(2,:),i,Pstore(3,:),i,Pstore(4,:),i,Pstore(5,: title('估计方差变化过程')
最小二乘法建模:
二、三次实验 本次实验要完成的内容: 1.参照index2,设计对象,从workspace空间获取数据,取二阶,三阶 对象实现最小二乘法的一次完成算法和最小二乘法的递推算法(LS and RLS); 2.对设计好的对象,在时间为200-300之间,设计一个阶跃扰动,用最 小二乘法和带遗忘因子的最小二乘法实现,对这两种算法的特点进行说 明; 实验内容结果与程序代码: 利用LS和RLS得到的二阶,三阶参数 算法 阶次 A1 A2 A3 B0 B1 B2 B3 LS 二阶 -0.78420.1373 -0.00360.5668 0.3157 RLS 二阶 -0.78240.1373 -0.00360.5668 0.3157 LS 三阶 -0.4381-0.12280.0407 -0.00780.5652 0.5106 0.1160
测试对象流程图 实验结果为:
2、加入噪声干扰 搭建对象
实验结果:
加入噪声干扰之后水箱输出不平稳,有波动。
实验二:相关分析法 搭建对象:
处理程序: for i=1:15 m(i,:)=UY(32-i:46-i,1);
end y=UY(31:45,2); gg=ones(15)+eye(15); g=1/(25*16*2)*gg*m*y; plot(g); hold on; stem(g); 实验结果: 相关分析法
系统辨识及自适应控制实验..

Harbin Institute of Technology系统辨识与自适应控制实验报告题目:渐消记忆最小二乘法、MIT方案与卫星振动抑制仿真实验专业:控制科学与工程姓名:学号: 15S******指导老师:日期: 2015.12.06哈尔滨工业大学2015年11月本实验第一部分是辨识部分,仿真了渐消记忆递推最小二乘辨识法,研究了这种方法对减缓数据饱和作用现象的作用;第二部分是自适应控制部分,对MIT 方案模型参考自适应系统作出了仿真,分别探究了改变系统增益、自适应参数的输出,并研究了输入信号对该系统稳定性的影响;第三部分探究自适应控制的实际应用情况,来自我本科毕设的课题,我从自适应控制角度重新考虑了这一问题并相应节选了一段实验。
针对挠性卫星姿态变化前后导致参数改变的特点,探究了用模糊自适应理论中的模糊PID 法对这种变参数系统挠性振动抑制效果,并与传统PID 法比较仿真。
一、系统辨识1. 最小二乘法的引出在系统辨识中用得最广泛的估计方法是最小二乘法(LS)。
设单输入-单输出线性定长系统的差分方程为:()()()()()101123n n x k a x k a k n b u k b u x k n k +-+⋯+-=+⋯+-=,,,, (1.1) 错误!未找到引用源。
式中:()u k 错误!未找到引用源。
为控制量;错误!未找到引用源。
为理论上的输出值。
错误!未找到引用源。
只有通过观测才能得到,在观测过程中往往附加有随机干扰。
错误!未找到引用源。
的观测值错误!未找到引用源。
可表示为: 错误!未找到引用源。
(1.2)式中:()n k 为随机干扰。
由式(1.2)得错误!未找到引用源。
()()()x k y k n k =- (1.3)将式(1.3)带入式(1.1)得()()()()()()()101111()nn n i i y k a y k a y k n b u k b u k b u k n n k a k i n =+-+⋯+-=+-+⋯+-++-∑ (1.4)我们可能不知道()n k 错误!未找到引用源。
系统辨识及自适应控制 教学大纲
系统辨识及自适应控制一、课程说明课程编号:090148Z10课程名称:系统辨识及自适应控制/ System Identification and Adaptive Control课程类别:专业课学时/学分: 32/2(其中实验学时:6 )先修课程:自动控制理论、线性代数适应专业:自动化、测控技术与仪器、智能科学与技术、电气工程及其自动化教材、教学参考书:1.杨承志、孙棣华等.系统辨识与自适应控制.重庆:重庆出版社.2003年;2.徐湘元.自适应控制理论与应用.北京:电子工业出版社.2007年;3.庞中华,崔红.系统辨识与自适应控MATLAB 仿真.北京:北京航空航天大学出版社.2009年二、课程设置的目的意义系统辨识与自适应控制是电气信息类专业大学本科高年级学生的一门专业选修课程,是现代控制理论的一个重要组成部分。
通过该课程的学习,帮助学生了解系统辨识与自适应控制的基本原理和算法,掌握系统数学模型的建立方法及自适应控制系统的设计方法和技巧,为培养学生成为控制学科的高级工程技术人才奠定基础。
三、课程的基本要求知识:掌握系统辨识与自适应控制的基本概念和基本原理,最小二乘参数辨识方法,最小方差自校正控制方法,广义最小方差自校正控制方法,极点配置自校正控制方法,自校正PID控制方法,自校正内膜控制方法,自校正模型算法控制方法,基于Lyapunov稳定性理论的模型参考自适应控制方法等。
能力:从实际应用的角度出发,针对具有一定程度不确定性的被控对象,能够运用上述方法和知识设计一般的自适应控制系统,满足控制系统的基本控制要求。
素质:拓展学生在控制工程领域的设计思路,丰富学生对控制系统的设计方法;通过对不确定性被控对象特点的分析、难于控制问题的解决培养学生发现问题、分析问题、解决问题的科研素养。
四、教学内容、重点难点及教学设计注:实践包括实验、上机等五、实践教学内容和基本要求通过实验,帮助学生巩固、加深理解课堂所学基本理论知识,在Matlab/SimuLink仿真计算平台中实现系统模型参数辨识和含噪声干扰系统的自六、考核方式及成绩评定1、平时成绩占40%:包括作业、上机实验考核以及平时上课考核;七、大纲主撰人:大纲审核人:。
数学模型-哈尔滨工业大学

系统建模的抽象过程
(可观测) 输入变量 (可观测) 输出变量
真实系统
观测屏障
抽象
真实系统
ω(t) ρ(t)
黑箱 灰箱 白箱
数学描述 ω(t)、ρ(t)---输入输出变量对
17
数学建模信息源
数据
2.先验知识
3.试验数据
先验 知识
建模
模型应用
目的 达到否?
目标
1.目标和目的
18
图2.1 数学建模的信息源
在定义一个系统时,首先要确定系统的边界。尽管世界上的事物是 相互联系的,但当我们研究某一对象时,总是要将该对象与其环境区别开 来。边界确定了系统的范围,边界以外对系统的作用称为系统的输入,系 统对边界以外的环境的作用称为系统的输出。
边界 输出
环境
输入
系统
8
研究上述系统时,可分为三类问题: (1)系统的分析问题 (2)系统的控制问题 (3)系统的辨识问题
K 0 s W0 ( s ) e (Ts 1) n
15
1.1.3 数学模型
本质上讲,系统数学模型是从系统概念出发的关 于现实世界的一小部分或几个方面的抽象的“映像”。
系统数学模型的建立需要建立如下抽象:输入、 输出、状态变量及其间的函数关系。这种抽象过程称 为模型构造。
系统数学建模就是将真实系统抽象成相应的数学 表达式(一些规则、指令的集合)。
2
主要内容安排
第一章 绪论 第二章 系统辨识常用输入信号 第三章 系统数学描述及经典辨识法 第四章 最小二乘法辨识
第五章 极大似然法辨识
第六章 系统结构辨识
3
实验1 白噪声和M序列的产生 实验2 相关分析法辨识脉冲响应
《系统辨识》课件
23
第二章
过渡响应法和频率响应法
§21 过渡响应法(时域法) 采用非周期试验信号,通过系统的动态响应研究系 统的模型。 一、非参数模型的辨识 在时域中建立线性系统非参数模型时,用很简便的 方法就可得到脉冲响应曲线,阶跃响应曲线、方波响应 曲线或它们的离散采样数据表。 脉冲响应:可以采用幅值相当大,宽度很窄的方波 来近似δ 函数 。 对于线性系统,脉冲响应,阶跃响应和方波响应之 24 间是可以相互转换的。
过程的非线性与时变性(有助于模型类的选择)
噪声水平(以便用多大的输入,使得观测量有多
大的信噪比)
变量之间的延迟(滞后环节参数) 2)输入信号的选择(阶跃、方波、脉冲、PRBS)。
16
第一章
概
述
3)采样速度的选择(要采集数据就有采样速度选择 问题)。实际上先采用较短的采样间隔,在数据分析时, 可根据需要隔几个取一个数据。 4)试验长度的确定(试验时间问题)。辨识精度与 试验时间的长短有关。 2、模型结构确定 根据辨识的目的及对被辨识系统的先验知识,确定
系统辨识
电气工程与自动化学院 陈 冲
1
课程主要内容
第一章
第二章 第三章 第四章 第五章
概
述
过渡响应法和频率响应法 辨识线性系统脉冲响应函数的相关分析法 线性系统参数估计的最小二乘法 线性系统的状态估计法
结束
2
第一章
一、建模的必要性 二、模型 三、建模方法
概
述
四、系统辨识的内容(或步骤)
哈工大智能控制神经网络第十一课神经网络系统辨识
m
n
y(k) biu(k d i) ai y(k i)
i0
i 1
或
y(k) qd B(q1) u(k) B(q1) u(k d)
A(q1 )
A(q1 )
第一式为 ARMA 模型:
右边第 2 项为输出 y(k)的过去值组合称自回归部分; 第 1 项为输入 u(k)的过去值组合称滑动平均部分。
定义:
P(z)
Y (z) U (z)
Zy(k) Z u (k )
用迟后移位定理求 Z 变换,经整理得 Z 传递函数:
P( z)
b0 + b1z 1 + b2 z 2 + + bm z m 1 + a1z 1 + a2 z 2 + + an z n
z d
m
b0 (1 pi z 1)
i1
n
z d P0 (z)z d
确定性系统NN辨识——改进算法
引入加权因子,此时
h [ c 1 y (k 1 ), y c 2 (k 2 ), , c ny (k n );
c n + 1 u (k d ),c n + 2 u (k d 1 ), c n + m + 1 u (k d m )]T
可取 ci i,01
则参数估计更新:w ( k + 1 ) w ( k ) + R ( k ) e ( k ) h ( k )
系统辨识理论基础
定义:在输入/输出数据基础上,从一组给 定模型类中确定一个所测系统等价的模型。 辨识三要素: 输入/输出数据 模型类(系统结构) 等价准则 e.g. J e
符号
P: 待辨识系统; Pˆ 辨识系统模型
哈工大模式识别实验报告
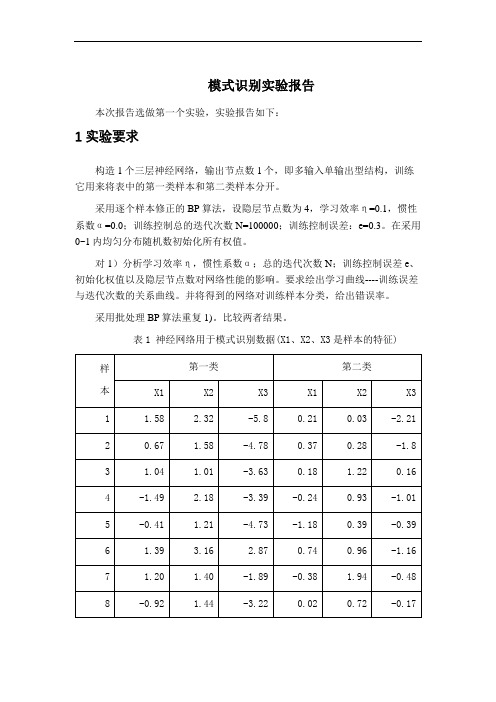
模式识别实验报告本次报告选做第一个实验,实验报告如下:1 实验要求构造1个三层神经网络,输出节点数1个,即多输入单输出型结构,训练它用来将表中的第一类样本和第二类样本分开。
采用逐个样本修正的BP算法,设隐层节点数为4,学习效率η=0.1,惯性系数α=0.0;训练控制总的迭代次数N=100000;训练控制误差:e=0.3。
在采用0~1内均匀分布随机数初始化所有权值。
对1)分析学习效率η,惯性系数α;总的迭代次数N;训练控制误差e、初始化权值以及隐层节点数对网络性能的影响。
要求绘出学习曲线----训练误差与迭代次数的关系曲线。
并将得到的网络对训练样本分类,给出错误率。
采用批处理BP算法重复1)。
比较两者结果。
表1 神经网络用于模式识别数据(X1、X2、X3是样本的特征)2 BP 网络的构建三层前馈神经网络示意图,见图1.图1三层前馈神经网络①网络初始化,用一组随机数对网络赋初始权值,设置学习步长η、允许误差ε、网络结构(即网络层数L 和每层节点数n l );②为网络提供一组学习样本; ③对每个学习样本p 循环a .逐层正向计算网络各节点的输入和输出;b .计算第p 个样本的输出的误差Ep 和网络的总误差E ;c .当E 小于允许误差ε或者达到指定的迭代次数时,学习过程结束,否则,进行误差反向传播。
d .反向逐层计算网络各节点误差)(l jp δ如果l f 取为S 型函数,即xl e x f -+=11)(,则 对于输出层))(1()()()()(l jp jdp l jp l jp l jp O y O O --=δ 对于隐含层∑+-=)1()()()()()1(l kj l jp l jp l jp l jp w O O δδe .修正网络连接权值)1()()()1(-+=+l ip l jp ij ij O k W k W ηδ式中,k 为学习次数,η为学习因子。
η取值越大,每次权值的改变越剧烈,可能导致学习过程振荡,因此,为了使学习因子的取值足够大,又不至产生振荡,通常在权值修正公式中加入一个附加动量法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验1 白噪声和M序列的产生
实验报告
哈尔滨工业大学
航天学院控制科学与工程系
专业:自动化
班级:110410420
姓名:
日期:2014 年10 月12 日
1.实验题目:白噪声和M序列的产生
3、M 序列生成原理
用移位寄存器产生M 序列的简化框图如下图所示。
该图表示一个由4个双稳态触发器顺序连接而成的4级移位寄存器,它带有一个反馈通道。
当移位脉冲来到时,每级触发器的状态移到下一级触发器中,而反馈通道按模2加法规则反馈到第一级的输入端。
1、生成均匀分布随机序列
(1)利用混合同余法生成[0, 1]区间上符合均匀分布的随机序列,并计算该序列的均值和方差,与理论值进行对比分析。
要求序列长度为1200,推荐参数为a=65539,M=2147483647,0<x 0<M 。
(2)将[0, 1]区间分为不重叠的等长的10个子区间,绘制该随机序列落在每个子区间的频率曲线图,辅助验证该序列的均匀性。
(3)对上述随机序列进行独立性检验。
(该部分为选作内容)
2、生成高斯白噪声
利用上一步产生的均匀分布随机序列,令n=12,生成服从N(0,1)的白噪声,序列长度为100,并绘制曲线。
3、生成M 序列
M 序列的循环周期取为63126=-=P N ,时钟节拍Sec 1=∆t ,幅度1=a ,逻辑“0”为a ,逻辑“1”为-a ,特征多项式65()F s s s =⊕。
生成M 序列的结构图如下所示。
x(j+1)=x(j);
end
x(1)=temp;
end
for i=1:Np
if(y(i)==0)
y(i)=a;
else
y(i)=-a;
end
end
figure(5)
stairs(y);
ylim([-1.5,1.5]);
7.实验结果及分析
实验1.1
程序运行计算出序列的均值:mean_r =0.4897,与理论值0.5很接近;序列的方差var_r =0.0824,与理论值1/12很接近
使用混合同余法得到生成的0-1均布随机序列如下所示:
得到的该随机序列落在10个子区间的频率曲线图如下:
从上图可以发现用混合同余法得到的随机序列平均分布性较好。
实验1.2
生成的白噪声信号如下图所示:
生成的白噪声的频率统计图如下:
从上图中,我们可以看到,生成的白噪声信号基本服从N(0,1)分布
实验1.3
生成的M序列如下图所示:
验证M序列性质:
均衡特性:m序列每一周期中 1 的个数比0 的个数多 1 个(-a和a的个数差1)测试程序:
a=sum(y==0)
b=sum(y==1)
得到结果:a =31
b =32
结论:从测试结果看每一周期中一的个数比0的个数多1个,与结论相符。
游程特性:m序列的一个周期(p=2n-1)中,游程总数为2n-1。
其中长度为k的游程个数占游程总数的1/2k=2-k,而且,在长度为k游程中,连1游程与连0 游程各占一半,其中1≤k≤(n-2)。
长为(n-1)的游程是连0 游程,长为n 的游程是连 1 游程。
测试程序:
%游程性质测试程序
zero=1;one=1;
M_zero=zeros(1,16);
M_one=zeros(1,16);
for i=1:63
if(i<=62)
if(y(i)==1)
if(y(i)~=y(i+1))
M_one(one)= M_one(one)+1;
one=one+1;
else
M_one(one)= M_one(one)+1;
end
else
if(y(i)~=y(i+1))
M_zero(zero)=M_zero(zero)+1;
zero=zero+1;
else
M_zero(zero)=M_zero(zero)+1;
end
end
else
if(y(i)==1)
if(y(i)==y(1))
one=one+1;
M_one(one)=M_one(one)+1;
end
else
if(y(i)==y(1))
zero=zero+1;
M_zero(zero)=M_zero(zero)+1;
end
end
end
end
display(M_zero);
display(M_one);
得到的M序列0,1游程结果分别如下所示:
M_zero =
1 2 1 1 1 5 4 3 1 2 1 3 2 2 1 1
M_one =
2 2 1 1 6 1 2 1 1 4 1
3 1 1 2 2
发现游程特性符合结果。
移位相加特性:m序列和它的位移序列模二相加后所得序列仍是该m序列的某个位移序列。
测试程序:
%移位相加特性验证
M1=circshift(y',3)' %将所产生的M序列向左移位3
M2=xor(y,M1) %将所产生的移位序列与原M序列模2相加
flag=0;
i=1;
while 1
if(circshift(M2',i)'==y)
flag=1;
break;
end
i=i+1;
end
display(flag) %显示标志位
display(i) %显示移位次数
实验结果如下所示:
flag = 1
i =29
说明M序列移位29次后与相加后的M序列相等。
8.结论
本次试验主要实践了混合同余法,正态分布随机数产生方法,M序列生成原理,生成均匀分布随机序列,生成高斯白噪声,生成M序列。
使用混合同余法生成了服从N(0,1)分布的随机序列,同时根据独立同分布中心极限定理,得到了高斯白噪声。
在实验1-3中使用6个移位寄存器和反馈通道生成了周期为63的M序列,同时验证了M序列的相关性质,从结果看,完全成立。
本次实验主要是对M序列和其相关性质有了更深入的了解,同时也进一步熟悉了MATLAB,收获颇多。