三维显示技术样本
三维立体显示技术
对观察者头部旳位置和观察角度有较严格旳限制 ;
不能显示或只能显示很有限旳运动视差图片 ;
水平辨别率损失,画面亮度较低 。
研究方向
更精确旳深度图;
区域移动补点研究 ;
运动视差图像旳研究 ;
新型构造和器件旳研究 。
返回
集成显示技术(Integral Imaging )
• 集成显示技术又称全景显示,于 1923年由 Lippmann发明。
体显示:G体像素
T体像素;
自动立体显示:到达上K旳可视区域;
MEMS器件在三维立体显示中旳应用;
全运动视差旳实现;
谢谢各位老师同学, 请提出宝贵意见。
被动发光旋转扫描体显示系统
Felix3D三维显示系统
可显示物体旳体像素数目10k。
被动发光旋转扫描体显示系统
Perspecta 3d显示屏
辨别率:768*768*192; 色彩格式:24bit RGB; 旋转屏转速:730rad; 体像素数:100M; 帧频:2409FPS; 接口数据率:4.68GB; 显示范围:10英寸; 可视角度:360°。
静态体三维显示技术
基于空间等离子体旳三维显示技术
静态体三维显示技术
DepthCube三维显示系统
体三维显示系统
最新进展
南加州大学研制旳三维显示系统
体三维显示系统
南加州大学研制旳三维显示系统旳 创新之处:
使用与水平成45度旳旋转镜来替代平面漫反射屏幕 。 研制了基于DLP旳帧频可高达5000fps旳超高速彩色投影机
体三维显示系统旳分类
目前,体三维显示系统从显示空间旳形成上划分可分为两
类:
•主动发光旋转扫描体 三维显示
•螺旋屏
全息成像原理及三维重建方法

全息成像原理及三维重建方法全息成像是一种利用光学原理将物体三维信息记录下来的技术。
它是通过一种特殊的光学装置捕获物体的全息图像,并在需要的时候通过光的干涉实现三维图像再现的技术。
全息成像不仅能够记录物体的外形,还能够记录物体的深度信息,因此在三维重建、防伪和显示技术等领域有广泛的应用。
全息成像的原理是基于光的干涉效应。
当一束激光照射到物体上时,它会发生散射,形成物体的复杂光场。
在这个过程中,物体的光场与参考光场相互干涉,形成一种可以被记录的干涉图样。
通常情况下,使用一块光敏材料,如光致休克玻璃(Holographic Plate)或者光致聚合物(Holographic Polymer)来记录干涉图样。
全息成像的过程分为记录和重建两个主要步骤。
在记录过程中,首先需要准备一束参考激光光束和一束物体激光光束。
参考激光光束直接照射到光敏材料上,形成参考光场。
物体激光光束经过物体散射后再照射到光敏材料上,与参考光场发生干涉作用。
这样,光敏材料上就会记录下这两个光场的干涉图样,形成全息图。
在重建过程中,当同样的参考激光光束照射到全息图时,光场会发生干涉,使得原始物体的三维信息以虚像的方式再现出来。
在全息成像中,三维重建是非常关键的一步。
一种常用的三维重建方法是数字全息成像。
数字全息成像通过将全息图数字化,然后利用计算机算法对全息图进行处理,以获得原始物体的三维信息。
这种方法相比传统的光学重建方法更加灵活,可以实现实时和动态的三维重建。
数字全息成像中的三维重建算法包括波前传播算法、双线性插值算法和光栅算法等。
其中,波前传播算法是最常用的一种算法。
它基于光的传播规律,通过解卷积的方法将被记录的光场还原到物体的三维信息。
双线性插值算法则利用了光的干涉规律,通过对样本点插值得到整个物体的三维信息。
光栅算法是一种比较复杂的算法,它通过将全息图分成很多小区域,并利用光栅来提取每个小区域的光学信息,进而重建三维图像。
除了数字全息成像,还有其他一些三维重建方法,如圆锥束投影重建法和层析重建法。
高分辨真三维显示中的体素化及均匀化方法

高分辨真三维显示中的体素化及均匀化方法高分辨真三维显示中的体素化及均匀化方法引言随着计算机科学和图形学的不断发展,三维图形技术也得到了广泛的应用。
而高分辨真三维显示作为图形学领域中的一项重要技术,对于三维图形的显示和处理具有很大的帮助。
在高分辨真三维显示中,体素化技术和均匀化方法是两个必不可少的技术,可以提高三维图形的显示效果和用户体验。
本文主要介绍高分辨真三维显示中的体素化技术和均匀化方法,希望能够为读者提供一些参考和帮助。
一、体素化技术体素化是指将三维物体转换成一系列体素(三维像素)的过程。
体素化技术可以将三维图形处理成一个个虚拟的立方体,这些立方体可以表示三维场景中的每一个物体。
其中,每一个立方体像素的颜色都可以用来描述场景中该立方体的物体的颜色或属性。
在高分辨真三维显示中,体素化技术主要包括以下几个方面:1、体素数据结构体素数据结构是一种用于存储三维图形的数据结构。
通常情况下,体素数据结构可以分为三种类型:块状体素、栅格体素和自适应体素。
其中,块状体素和栅格体素是比较基本的体素数据结构,而自适应体素则是一种更加先进的体素数据结构。
块状体素和栅格体素都是由固定大小的立方体体素组成的,区别在于块状体素的立方体必须是相邻的,而栅格体素则可以是不相邻的。
2、体素模型重建体素模型重建是指根据输入的点云数据集建立起符合点云表面特征的三维模型。
体素模型重建技术可以使用各种算法进行,例如基于网格重建的方法、基于流形理论的方法、基于深度图像的方法等。
其中,基于深度图像的方法是一种常用的体素模型重建方法,可以使用深度相机采集场景深度图像,并使用基于解析法的体素模型重建算法,将二维图像转换成三维模型。
3、体素叶子节点的表示体素树(VoxTree)是将物体划分成立方体体素后所得到的一种层次结构。
在体素树中,每一个叶子节点都可以存储着一个立方体体素。
可以使用不同的叶子节点表示方法,如图片压缩技术、树状体素分割算法、分段算法等。
三维显示的技术(可编辑修改word版)

三维显示技术摘要:平面三维显示技术是近年来最新出现的虚拟现实显示技术,其最大的特点是观察者无需使用任何辅助附加设备,直接用肉眼就可看到屏幕上显示的三维图像。
为推进三维显示技术的发展,进一步研究了视差立体成像原理,本文主要简单介绍了3D眼镜的分类及偏振眼镜立体式电影的原理。
正文:三维显示技术是虚拟现实的关键技术之一,同时也是虚拟现实系统的基本要求。
在信息时代,三维显示技术是一种应用广泛,并且对其它科学技术的研究有着极大促进作用的应用技术。
随着三维显示在各个领域的广泛应用以及它对人们的生产和生活带来的极大便利,三维显示技术已成为当前世界上显示技术领域的一个研究热点。
各国、各科研机构都投入了大量的人力和物力进行了深入探索和研究,使三维显示技术得到了日新月异的发展。
美国、日本等许多发达国家对三维显示技术的研究工作开展较早,取得了许多突破性的进展并有相应的产品或原型机发布;而我国对于三维显示技术的研究和开发还处于初始阶段,对三维显示的研究只是限于在现有原理的基础上开发相应的产品。
由于大多数三维显示设备价格都比较昂贵,所以开发若干结构简单、易于实现的三维显示系统并使其为大众所接受和应用是当前研究开发的最终目的。
三维显示分为全息三维显示和非全息三维显示两种。
全息三维显示由于计算量过大以及当前技术的限制,适用于静态图像的摄取和显示;非全息障栅三维显示由于具有易于实现的特点,为当今广泛采用的三维显示技术。
视差立体成像原理人眼的立体感能将视场(即眼睛所观看到的景物区域)中的物体区别出远近,通常把左右两眼所获得的不同图像分别称作左图像和右图像。
在显示技术中,如果同时在屏幕上显示出左图像和右图像,又利用一定的装置使得左眼只能看到左图像,右眼只能看到右图像,那么, 经大脑融合就能还原成立体图像。
如图1 ,图中A1、A2分别是同一物点A 在屏幕上所显示的左图像点与右图像点; B1、B2分别是同一物点B 在屏幕上所显示的左图像点与右图像点。
microct检测骨组织步骤 -回复

microct检测骨组织步骤-回复microCT检测骨组织是一种常用的三维成像技术,可以非破坏性地分析骨骼结构和组织的微小细节。
以下是该过程的一步一步详细说明。
第一步:骨标本的准备为了进行microCT检测,首先需要准备骨标本。
这可能涉及从动物或人体中获取骨骼样本,并确保它们在获取后保持新鲜。
对于小型标本,如小鼠骨骼,可以直接使用,而对于较大的标本,需要先进行取样和处理。
取样可能涉及从整个骨骼中切割出感兴趣的区域。
此外,在骨标本准备过程中,还需要确保除去任何可能对图像质量产生干扰的结构,如软组织残留或其他非骨骼物质。
第二步:样本稳定为了确保microCT图像的质量,骨标本需要经过稳定处理。
这是通过将标本放入适用于microCT扫描的容器中实现的。
这些容器通常是透明的,以允许X射线透射,这对于成像至关重要。
此外,容器还需要稳定标本,以避免在扫描期间产生任何移动或振动。
因此,使用适当的材料或者将标本固定在容器内是必要的。
第三步:扫描参数设置在进行microCT扫描之前,需要设置适当的扫描参数。
这些参数包括X 射线源的能量设置、获得图像的解析度、扫描时间等。
根据骨样本的尺寸和所需成像细节的精度,这些参数的选择可能会有所不同。
更高的解析度通常需要更长的扫描时间。
选择合适的参数是确保获取高质量图像的关键。
第四步:进行扫描一旦参数设置完成,可以开始进行microCT扫描。
这涉及将样本放入microCT设备中,并启动扫描程序。
X射线源将发出通过骨标本的X射线束,而探测器将记录通过标本的射线的强度。
这些强度数据将用于构建三维图像。
第五步:图像重建扫描完成后,需要对记录的数据进行图像重建。
这通常通过使用重建算法来实现,该算法将通过吸收X射线的强度转换为三维图像的像素值。
这些图像将显示骨骼的内部结构和组织。
第六步:图像分析一旦完成图像重建,接下来就是对图像进行分析。
根据具体的研究目的,可以使用各种图像分析工具和软件来评估骨骼样本的特征。
基于小样本手部关键点的MLP_网络提升3D_光场交互准确度方法

第 38 卷第 9 期2023 年 9 月Vol.38 No.9Sept. 2023液晶与显示Chinese Journal of Liquid Crystals and Displays基于小样本手部关键点的MLP网络提升3D光场交互准确度方法任尚恩,邢树军,陈硕,于迅博,颜玢玢,王葵如,桑新柱*(北京邮电大学电子工程学院,北京 100876)摘要:针对当前3D光场手势交互存在识别率低、识别速度慢、深度学习网络需要较多数据样本的问题,本文提出了一种基于小样本手部关键点的多层感知器(Multi-Layer Perceptron,MLP)网络提升3D光场交互准确度方法,识别速度达到毫秒级。
在手部关键点采集过程中,从不同位置采集得到的同一种手势关键点三维数据存在显著差异。
为了消除差异,本文提出在同一右手笛卡尔坐标系下,通过位移和罗德里格旋转公式对简化后的手势模型进行位姿变换,将同一种手势归一化。
一个MLP神经网络被用来从归一化后的手部关键点跳变关系中提取手部特征。
实验结果表明,本文提出的方法对3D光场交互中的简单手势识别率为95%以上,对复杂手势的识别率为90%以上。
与此同时,该方法在小样本数据集训练下表现出优秀的性能,能够满足精确和快速手势识别的要求。
最后,本文展示了一种将所提出的方法成功应用于3D光场交互的场景。
关键词:交互;手势分类识别;多层感知器;小样本数据集中图分类号:TP391.4 文献标识码:A doi:10.37188/CJLCD.2023-0072Method for improving the accuracy of 3D light field interaction based on a small dataset of hand key points using an MLP network REN Shang-en,XING Shu-jun,CHEN Shuo,YU Xun-bo,YAN Bin-bin,WANG Kui-ru,SANG Xin-zhu*(School of Electronic Engineering, Beijing University of Posts and Telecommunications,Beijing 100876, China)Abstract:To address the issues of low recognition rate,slow recognition speed,and the need for large amounts of data samples in current 3D light field gesture interaction, this paper proposes a method based on a small dataset of hand key points using a multi-layer perceptron(MLP)network to improve the accuracy of 3D light field interaction, with recognition speed reaching the millisecond level. In the process of collecting hand key points, there are significant differences in the three-dimensional data of the same type of hand gesture collected from different locations. In order to eliminate these differences, this paper proposes a method of normalizing the same gesture through pose transformation of the simplified gesture model in the same right-hand Cartesian coordinate system using displacement and Rodrigues rotation formula.An MLP 文章编号:1007-2780(2023)09-1198-07收稿日期:2023-02-23;修订日期:2023-03-24.基金项目:国家重点研发计划(No.2021YFB2802300)Supported by the National Key R&D Program of China (No.2021YFB2802300)*通信联系人,E-mail:xzsang@第 9 期任尚恩,等:基于小样本手部关键点的MLP网络提升3D光场交互准确度方法neural network is utilized to extract hand features from the normalized hand key points transition relationships. Experimental results show that the proposed method has a recognition rate of above 95% for simple gestures in 3D light field interaction, and a recognition rate of above 90% for complex gestures. Furthermore,the proposed method demonstrates excellent performance under training with a small dataset, meeting the requirements of both accurate and fast gesture recognition.Finally,this paper presents a successful application of the proposed method to a 3D light field interaction scenario.Key words: interaction; gesture recognition; MLP; small dataset1 引言人机交互一直是目前研究的热门课题,它被应用于各种不同的显示设备,如虚拟现实(VR)、裸眼3D显示等。
第九章 三维分析
第九章三维分析相当长的一段时间里,由于GIS理论方法及计算机软硬件技术所限,GIS以描述二维空间为主,同时发展了较为成熟的基于二维空间信息的分析方法。
但是将三维事物以二维的方式来表示,具有一定的局限性。
在以二维方式描述一些三维的自然现象时,不能精确地反映、分析和显示有关信息,致使大量的三维甚至多维空间信息无法加以充分利用。
随着GIS技术以及计算机软硬件技术的进一步发展,三维空间分析技术逐步走向成熟,成为GIS空间分析的重要内容,成为传统二维分析理论与方法的有益补充。
三维空间分析相比二维分析,更注重对第三维信息的分析。
基于高程信息的三维分析主要包括三维几何参数计算、地形因子提取、地表类型分类、通视性分析、地形剖面图绘制、地形三维可视化等。
第三维信息也可以是如降雨量、温度等,进一步扩展了三维分析的应用领域。
ArcGIS具有一个能为三维可视化、三维分析以及表面生成提供高级分析功能的扩展模块3D Analyst,可以用它来创建动态三维模型和交互式地图,从而更好地实现地理数据的可视化和分析处理。
3D Analyst扩展模块的核心是ArcScene应用,它可以更加高效地管理三维GIS数据、进行三维分析、创建三维要素以及建立具有三维场景属性的图层。
例如,可以把平面二维图形突出显示成三维结构、线生成墙、点生成线。
因此,不用创建新的数据就可以建立高度交互性和可操作性的场景。
如果是具有三维坐标的数据,利用该模块可以把数据准确地放置在三维空间中。
本章主要介绍如何利用ArcGIS三维分析模块进行创建表面、表面分析及在ArcScene 中数据的三维可视化。
此外,还包括数据转换的介绍,包括二维要素三维化、将栅格数据转换为矢量数据以及将TIN表面数据转换为矢量要素数据。
最后,设计了多个实例与练习帮助读者掌握常用的ArcGIS三维分析的理论与方法。
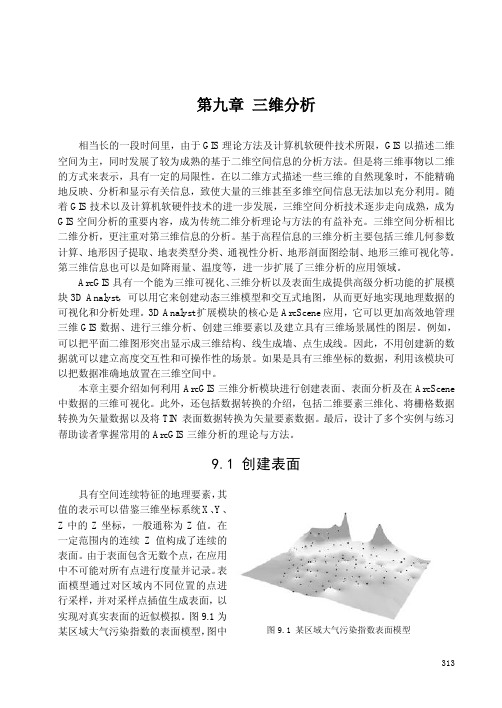
9.1 创建表面具有空间连续特征的地理要素,其值的表示可以借鉴三维坐标系统X、Y、Z中的Z坐标,一般通称为Z值。
三维荧光显微与反卷积
三维荧光显微与反卷积1. 引言三维荧光显微与反卷积技术是一种在生物医学领域中广泛应用的高级显微成像技术。
它通过结合荧光显微镜和图像处理算法,能够实现对三维生物样本的高分辨率成像和重建。
本文将对三维荧光显微与反卷积技术进行深入研究,探讨其原理、应用以及未来的发展方向。
2. 三维荧光显微原理2.1 荧光显微镜荧光显微镜是一种能够通过激发样本中的特定分子发射荧光信号来实现成像的仪器。
它通过激发样本中的特定分子使其处于激发态,然后检测其发射出的荧光信号。
相比于传统的透射式显微镜,荧光显微镜具有更高的灵敏度和分辨率。
2.2 三维成像传统的二维成像只能提供样本表面或者某个特定深度处信息,而无法获取整个样本内部结构信息。
而在生物医学研究中,我们往往需要对样本的三维结构进行观察和分析。
三维荧光显微技术通过对样本进行多次成像,然后通过图像处理算法将这些成像结果叠加起来,从而实现对样本的三维成像。
3. 三维荧光显微与反卷积技术3.1 反卷积原理反卷积是一种图像处理算法,它可以将模糊图像恢复为原始清晰图像。
在三维荧光显微中,由于光学系统的限制和样本的散射等因素,得到的成像结果往往是模糊的。
反卷积技术可以通过数学算法将这些模糊图像恢复为清晰的原始图像。
3.2 三维反卷积在二维反卷积中,我们可以利用二维傅里叶变换来实现。
然而,在三维荧光显微中需要处理的是三维数据,因此需要将二维傅里叶变换扩展到三维空间。
通过对样本进行多次成像,并利用数学算法将这些成像结果进行叠加和处理,可以得到清晰的三维结构信息。
4. 三维荧光显微与反卷积的应用4.1 细胞成像三维荧光显微与反卷积技术在细胞成像领域有着广泛的应用。
通过对细胞内部的分子进行标记,可以观察到细胞内部的结构和功能。
三维荧光显微与反卷积技术可以提供高分辨率的细胞成像,帮助研究人员更好地理解和研究生物学过程。
4.2 神经科学研究在神经科学研究中,三维荧光显微与反卷积技术可以帮助研究人员观察和分析神经元的结构和连接方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三维显示技术
摘要: 平面三维显示技术是近年来最新出现的虚拟现实显示技术,其最大的特点是观察者无需使用任何辅助附加设备,直接用肉眼就可看到屏幕上显示的三维图像。
为推进三维显示技术的发展,进一步研究了视差立体成像原理,本文主要简单介绍了3D眼镜的分类及偏振眼镜立体式电影的原理。
正文: 三维显示技术是虚拟现实的关键技术之一,同时也是虚拟现实系统的基本要求。
在信息时代,三维显示技术是一种应用广泛,而且对其它科学技术的研究有着极大促进作用的应用技术。
随着三维显示在各个领域的广泛应用以及它对人们的生产和生活带来的极大便利,三维显示技术已成为当前世界上显示技术领域的一个研究热点。
各国、各科研机构都投入了大量的人力和物力进行了深入探索和研究,使三维显示技术得到了日新月异的发展。
美国、日本等许多发达国家对三维显示技术的研究工作开展较早,取得了许多突破性的进展并有相应的产品或原型机发布;而中国对于三维显示技术的研究和开发还处于初始阶段,对三维显示的研究只是限于在现有原理的基础上开发相应的产品。
由于大多数三维显示设备价格都比较昂贵,因此开发若干结构简单、易于实现的三维显示系统并使其为大众所接受和应用是当前研究开发的最终目的。
三维显示分为全息三维显示和非全息三维显
示两种。
全息三维显示由于计算量过大以及当前技术的限制,适用于静态图像的摄取和显示; 非全息障栅三维显示由于具有易于实现的特点,为当今广泛采用的三维显示技术。
视差立体成像原理
人眼的立体感能将视场(即眼睛所观看到的景物区域)中的物体区别出远近,一般把左右两眼所获得的不同图像分别称作左图像和右图像。
在显示技术中,如果同时在屏幕上显示出左图像和右图像,又利用一定的装置使得左眼只能看到左图像,右眼只能看到右图像,那么,经大脑融合就能还原成立体图像。
如图1 ,图中A1、A2分别是同一物点A 在屏幕上所显示的左图像点与右图像点; B1、B2分别是同一物点B 在屏幕上所显示的左图像点与右图像点。
如果左眼只能看到A1、
B1 ,右眼只能看到A2、B2 ,则在人的大脑里就能够反映出A 点和B 点的深度信息。
图像点A成像于屏幕之后,称之为”后方图像”;图像点B成像于屏幕之前,称之为”前方图像”。
设人两眼之间的距离为x,人眼与屏幕的距离为L, A1、A2两点之间距离为SA ,
B1、B2两点之间距离为SB 。
则后方图像A 点距屏幕的深度为:D =SAx - SAL, (1)同理,前方图像B 点距屏幕的深度为:
D =SBx – SBL。
全息记录是利用干涉原理,将物体发出的特定光波以干涉条纹的形式记录下来,使物光波前的全部信息都贮存下来1以R ( x, y )表示参考光, O ( x,y)表示物光,则记录的总光强为I ( x, y) = |O ( x, y) + R ( x, y) |2 (1) 利用全息衍射再现的原理,用计算机模拟再现数字全息图1数字计算产生照明波前C ( x, y ) 1由衍射原理可知,全息图平面的透射波场U ( x, y)为照明波前与衍射屏(全息图)振幅透射率的乘积 ,即U ( x, y) =C ( x, y) I ( x, y) =C |R |2 +C |O |2 +CR3O +CRO3(2)透射波前U ( x, y)中的第四项包含了原物光的共轭信息,如果再现光C ( x, y) =3( x, y) , 能够再现得到与原物体一致的实像1在O3( x, y)传播的光场区域,选取一系列与全息图平行的平面,并计算其二维光场分布1经过研究各个平面光强分布的规律找出三维像点的位置和亮度数据1设某一选择平面Pξη,
离全息图的距离为d,在菲涅耳近似情况下,再现共轭物光波波前Uid (ξ,η)的
计算表示式如式(3)Uid (ξ,η) =A k O3( x, y) exp - i2πλd( xξ+ yη) ·expi πλd( x2 + y2 ) expiπλd(ξ2 +η2 ) d x d y =A expiπλd(ξ2 +η2 ) k O3( x, y) expiπλd( x2 + y2 ) ·exp - i2πλd( xξ+ yη) d x d y (3)O3( x, y)能够表示成会聚于不同点(ζl ,ηl , dl )处球面波的叠加,会聚点即为像点1即在数学上O
3( x,y)能够表示成O3( x, y) = 6lB l exp - iπλdl( x2 + y2 ) ·exp - i πλdl(ξ2l +η2l ) exp i2πλdl( xξl + yηl ) (4)式中B l 表示会聚于(ζl ,ηl , dl )处的像点的亮度1于是式(3)可表示为Uid (ξ,η) =A expiπλd(ξ2 +η2 ) k6lB l ·exp - iπλdl(ξ2l +η2l ) exp -iπλdl( x2 +
y2 ) ·expiπλd( x2 + y2 ) exp i2πλdl( xξl + yηl ) ·exp - i2πλd( xξ+ yη) d x d y (5)因为光强分布为|Uid (ξ, η) |2 , 显然, 对于dl = d的会聚点,积分结果为δ函数, 即为像点1而dl 不等于d的会聚点,在选择平面上则形成弥散斑1。
3D眼镜的分类
偏光原理, 人的视觉之因此能分辨远近, 是靠两只眼睛的差距。
人的两眼分开约5公分, 两只眼睛除了瞄准正前方以外, 看任何一样东西, 两眼的角度都不会相同。
虽然差距很小, 但经视网膜传到大脑里, 脑子就用这微小的差距, 产生远近的深度, 从而产生立体感。
一只眼睛虽然能看到物体, 但对物体远近的距离却不易分辨。
根据这一原理, 如果把同一景像, 用两只眼睛视角的差距制造出两个影像, 然后让两只眼睛一边一个, 各看到自己一边的影像, 透过视网膜就能够使大脑产生景深的立体感了。
我们称其为”偏光原理”。
3D眼镜的分类有三种, 一是时分式, 二是被动偏光式, 三是主动快门式。
首先介绍一下时分式。
色差式3D技术, 英文为Anaglyphic 3D, 配合使用的是被动式红-蓝( 或者红-绿、红-青) 滤色3D眼镜。
色差式又称互补色, 大家常见红蓝, 红绿等有色镜片类的都是色差式的3D眼镜。
色差式
能够称为分色立体成像技术, 是用两台不同视角上拍摄的影像分别以两种不同的颜色印制在同一副画面中。
用肉眼观看的话会呈现模糊的重影图像, 只有经过对应的红蓝等立体眼镜才能够看到立体效果, 就是对色彩进行红色和蓝色的过滤, 形成视差, 此时两只眼睛看到的不同影像在大脑中重迭就会呈现出3D立体效果。
可是这种眼镜的立体效果是最次的, 画面质量也最差。
其次是被动偏振式。
偏光式3D技术也叫偏振式3D技术, 英文为Polarization 3D, 配合使用的是被动式偏光眼镜。
偏光式3D眼镜能够分为圆偏振式3D眼镜和线偏式3D眼镜两种, 圆偏振式的效果比线偏振式的更好, 更真实。
主要原理是立体感产生的主要原因是左右眼看到的画面不同, 拍摄立体图像时就是用2个镜头一左一右。
然后左边镜头的影像经过一个横偏振片过滤, 得到横偏振光, 右边镜头的影像经过一个纵偏振片过滤, 得到纵偏振光。
立体眼镜的左眼和右眼分别装上横偏振片和纵偏振片, 横偏振光只能经过横偏振片, 纵偏振光只能经过纵偏振片。
在偏振式3D眼镜中运用的是光的偏振。
因此以下简单地介绍一下光的
偏振, 光的偏振我们在大二时就已经学过了, 我们知道光是一种横波, 因此会发生偏振, 横波的振动矢量垂直于波的传播方向振动, 振动矢量偏于某个特定方向的现象叫偏振; 纵波只能沿着波的传播方向振动, 因此不可能有偏振。
自然光是沿各个方向振动的光。
自然光经过偏振片( 叫做起偏器) 之后, 只有振动方向跟偏振片的透振方向一致的光波才能经过。
也就是说, 经过第一个偏振片的光波, 在垂直于传播方向的平面上, 只沿着一个特定的方向振动。
这种光叫做偏振光。
快门式3D眼镜, 快门式能够为家庭用户提供高品质的3D显示效果, 这种技术的实现需要一付主动式LCD快门眼镜, 交替左眼和右眼看到的图象以至于你的大脑将两幅图像融合成一体来实现, 从而产生了单幅图像的
3D深度感。
快门式3D眼镜原理图根据人眼对影像频率的刷新时间来实现的, 经过提高画面的快速刷新率(至少要达到120Hz)左眼和右眼各60Hz的快速。