方位角
方位角名词解释

方位角名词解释方位角是描述一个物体、地点或方向相对于北方向的角度或方向。
这个角度是从北向开始逆时针方向测量的,范围一般是0°到360°。
方位角是导航和地理定位中常用的术语。
在地理坐标系统中,方位角度量的是一个地点相对于北方向的角度。
北方的方位角是0°或360°,东方是90°,南方是180°,西方是270°。
其他方向的角度根据其相对于北方的偏转量确定。
例如,一个地点的方位角是45°,则表示它相对于北方偏转了45°,即位于东北方向。
方位角也可以用来表示一个物体相对于观察者的角度。
例如,当我们面对一个物体时,它的方位角度量是0°。
如果我们向左转90°,则表示该物体相对于我们的位置在左侧。
方位角在许多领域都有应用。
在航海和航空导航中,方位角是导航设备的重要参数,用来指导船只或飞机的方向。
在天文学中,方位角被用来描述天体相对于观察者的位置。
在地图制作和地理信息系统中,方位角用来指示一个地点相对于地图北方向的位置。
方位角还可以用来描述物体或地点之间的相对方向关系。
例如,如果两个物体的方位角相差45°,则它们相对位置偏转了45°。
这在导航和路径规划中非常有用,能够帮助人们确定方向和距离。
总之,方位角是描述物体、地点或方向相对于北方向的角度或方向。
它在导航、地理定位、天文学和地图制作等领域都有重要的应用。
方位角的测量范围是0°到360°,顺时针方向为正,逆时针方向为负。
对于一个地点,方位角度量的是其相对于北方的角度;对于一个物体,方位角度量的是其相对于观察者的角度。
方位角的测量能够帮助人们确定方向、定位位置和规划路径。
方位角名词解释

方位角名词解释方位角是指物体或位置相对于参考点的角度。
它常用于导航、地理和天文学中,用来描述一个地点或物体相对于其他地点或物体的位置方向。
方位角通常表示为以北方为基准的角度,从0度到360度。
方位角的定义方位角是从参考点的北方向开始逆时针测量的角度。
北方为0度(或360度),东方为90度,南方为180度,西方为270度。
方位角的取值范围是0度到360度。
方位角的其它常用表示方式是用8个基本方向和16个方向来代表,如下所示:•北(N):0度•北东北(NNE):22.5度•东北(NE):45度•东东北(ENE):67.5度•东(E):90度•东东南(ESE):112.5度•东南(SE):135度•南东南(SSE):157.5度•南(S):180度•南西南(SSW):202.5度•西南(SW):225度•西西南(WSW):247.5度•西(W):270度•西西北(WNW):292.5度•西北(NW):315度•北西北(NNW):337.5度在方位角的定义中,值得注意的是方位角的度量是相对的。
也就是说,一个物体在不同的参考点上可能有不同的方位角。
方位角的应用方位角在许多领域有广泛的应用。
导航和地理学方位角在导航和地理学中非常重要。
在地图上标注物体或位置的位置和方向时,方位角可以帮助人们准确地导航和确定方向。
无论是在陆地上还是在海洋上,船舶、飞机和车辆导航系统都使用方位角来确定目标的位置和方向。
天文学方位角在天文学中被广泛应用。
观测天体时,天文学家通常使用方位角来描述天体在天空中的位置。
例如,方位角可以用来确定星体的升起和降落的方向,以及日出和日落的时间。
摄影和航空摄影在摄影和航空摄影中,方位角可以用来确定拍摄目标的方向和位置。
这对于飞行员和地理信息系统(GIS)专业人员来说非常重要。
建筑和城市规划方位角在建筑和城市规划中也起着重要的作用。
在规划建筑物和城市基础设施时,使用方位角可以帮助设计师确定太阳的高度和方向,以最大限度地利用自然光。
方位角的概念

方位角的概念方位角是指从观测点出发连线与参照方向之间的夹角,用来表示一个点相对于另一个点的位置方向关系。
方位角通常以度数表示,以正北方向为参考基准,相对方向为顺时针方向,常用于地理、天文等领域的定位和导航计算。
方位角是以地球表面的一个点为基准,通过两点之间的直线距离和夹角来确定方向。
通常情况下,方位角是相对于观测点的朝向,通常是测量开始点朝向终点的方向,因此它是一种极坐标。
方位角的正北方向是以地球的北极为基础,向一根通过该点的恒星指向的一个球的表面点。
在地球上,方位角的坐标系统可以使用经度和纬度,这样就可以计算出方位角和仰角的值,从而确定地球上的任意一点的精确位置。
在天文测量中,方位角用于表示天文对象的方向。
在地球上观测天空时,方位角是以一个常见的基准点为中心的坐标系统,即地平坐标系。
在这个坐标系中,方位角通常用东(E)和西(W)表示,其中东为0度,北为90度,西为180度,南为270度。
在地平坐标系中,方位角和高度角共同确定了观测天体的位置。
方位角也经常用于导航和定位。
在地面测量中,方位角可以帮助测量一个点相对于另一个点的位置。
在飞行中,方位角可以帮助确定飞机的朝向和位置,从而避免飞越禁飞区域,保证飞行的安全。
在现代技术中,方位角有多种应用。
例如,在人脸识别技术中,方位角可以确定人脸在相机视野中的位置。
在机器人导航中,方位角可以帮助机器人确定目标位置的方向。
在无人驾驶汽车中,方位角可以帮助车辆决定下一步应该往哪个方向行驶。
总之,方位角是一种用于确定地球上和天空中物体位置方向的重要工具。
通过方位角,可以确定两个点之间的方向关系,准确计算目标位置的距离和方向,实现精确的导航和定位。
方位角计算公式范文
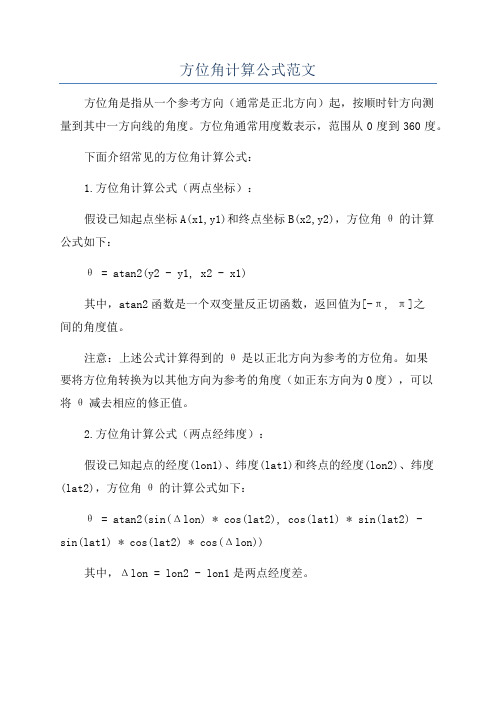
方位角计算公式范文方位角是指从一个参考方向(通常是正北方向)起,按顺时针方向测量到其中一方向线的角度。
方位角通常用度数表示,范围从0度到360度。
下面介绍常见的方位角计算公式:1.方位角计算公式(两点坐标):假设已知起点坐标A(x1,y1)和终点坐标B(x2,y2),方位角θ的计算公式如下:θ = atan2(y2 - y1, x2 - x1)其中,atan2函数是一个双变量反正切函数,返回值为[-π, π]之间的角度值。
注意:上述公式计算得到的θ是以正北方向为参考的方位角。
如果要将方位角转换为以其他方向为参考的角度(如正东方向为0度),可以将θ减去相应的修正值。
2.方位角计算公式(两点经纬度):假设已知起点的经度(lon1)、纬度(lat1)和终点的经度(lon2)、纬度(lat2),方位角θ的计算公式如下:θ = atan2(sin(Δlon) * cos(lat2), cos(lat1) * sin(lat2) -sin(lat1) * cos(lat2) * cos(Δlon))其中,Δlon = lon2 - lon1是两点经度差。
注意:上述公式计算得到的θ是以正北方向为参考的方位角。
如果要将方位角转换为以其他方向为参考的角度(如正东方向为0度),可以将θ减去相应的修正值。
3.方位角计算公式(方向余弦矩阵):方向余弦矩阵(Direction Cosine Matrix)是一种将方位角和俯仰角等转化为三维空间坐标旋转的方式。
方向余弦矩阵的计算公式如下:D=[ cos(θ) * cos(φ), sin(θ) * cos(φ), -sin(φ) ][ -sin(θ), cos(θ), 0 ][ cos(θ) * sin(φ), sin(θ) * sin(φ), cos(φ) ]其中,θ是方位角,φ是俯仰角。
D是一个3行3列的矩阵,表示坐标变换矩阵。
上述是常见的方位角计算公式,根据不同的应用场景和问题,可能还会有其他的计算公式。
方位角

方位角1.方向角一般是指以观测者的位置为中心,将正北或正南方向作为起始方向旋转到目标的方向线所成的角(一般指锐角),通常表达成北(南)偏东(西)××度.方位角定义:从标准方向的北端起,顺时针方向到直线的水平角称为该直线的方位角。
方位角的取值范围为0°~360°。
方位角:从某点的指北方向线起,顺时针方向至目标方向线的水平夹角,从真子午线起算的为‘真方位角’;从磁子午线起算的为‘磁方位角’;从坐标纵线起算的为‘坐标方位角’。
方向角(Bearing)乃一平面角,系一直线与南北方向线(参见方位角条)间所夹之角,仍系用来标出两点方位之一法。
与方位角不同者,方向角系分由南北起算,角度值在零度及九十度之间。
方向角之表出方式乃是在角度值之前冠以南北字样,其后则书出东西字样。
例如在图一中,设O点观测点或原点,OA之方向角为N50。
E(北五十度东),系由北方以顺时针方向向东量出,OB之方向角为S35。
E,乃由南方沿反时针方向向东量出。
OC之方向角为S35。
W,OD之方向角为N30。
W。
此四线分别在不同之象限中,所表之值中,加上冠字尾字可表出该线在何象限,亦表出应向那一方向量出。
(见图1)方向角与方位角一样,亦根据其北南线是真北南、磁北南、假定北南而有真方向角、磁方向角、假定方向角之名称。
同一条直线,由於起点终点不同,所表出直线之方向亦相反。
如图二所示,直线LP,如以L为起点,向P之方向角若为N80。
E,则以P为起点,向L之方向为则为S80。
W,前者若称为前方向角,后者则称为后方向角。
反而言之。
若PL命名为前方向角,LP即为后方向角。
前、后方向角之角度值相等,但冠字尾字皆要改变,即N变为S,或S变为N;同时E变为W,或W变为E。
2.。
几种方位角的概念

几种方位角的概念
好的,咱们来聊聊方位角这个话题。
方位角嘛,就是用来描述一个点相对于另一个点的方向的一种角度。
想象一下,你站在一个地方,想告诉别人另一个地方在哪里,这时候方位角就派上用场了。
首先,咱们得说说真北、磁北和 grid north 这三个概念。
真北,顾名思义,就是地球上真正的北方,它指向地理北极点。
而磁北呢,是指向地磁北极的方向。
这俩兄弟虽然都是指向北方,但它们并不完全重合,因为地球的磁场并不是完全对准地理北极的。
接着是 grid north,这个是地图上的概念。
它是指地图上北边的方向,通常与真北有一定的角度差。
这个角度差叫做地图的收敛角。
在不同的地方,这个角度差也不一样。
然后是方位角(bearing)。
方位角是从一个点到另一个点的方向,通常是从北方向顺时针测量。
比如,如果一个点在另一个点的正东方,那么方位角就是 90 度。
如果是在正南方,那么就是 180 度,西方是 270 度,北方是 360 度或 0 度。
最后,还有个东西叫航向角(heading)。
航向角通常是指船舶或飞机等移动物体当前前进的方向。
这个角度也是从北方向顺时针测量的。
所以,你看,方位角这东西,虽然听起来有点复杂,但其实还是挺有意思的。
它就像是我们在地球这个大舞台上用来定位的指南针,帮助我们找到方向,不会迷路。
方位角的名词解释
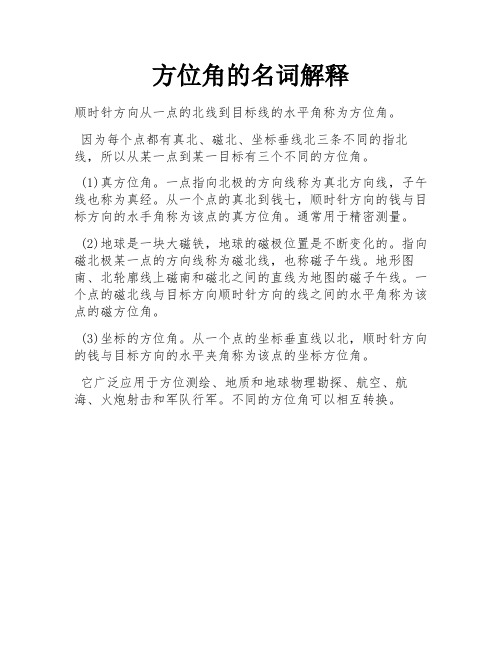
方位角的名词解释
顺时针方向从一点的北线到目标线的水平角称为方位角。
因为每个点都有真北、磁北、坐标垂线北三条不同的指北线,所以从某一点到某一目标有三个不同的方位角。
(1)真方位角。
一点指向北极的方向线称为真北方向线,子午线也称为真经。
从一个点的真北到钱七,顺时针方向的钱与目标方向的水手角称为该点的真方位角。
通常用于精密测量。
(2)地球是一块大磁铁,地球的磁极位置是不断变化的。
指向磁北极某一点的方向线称为磁北线,也称磁子午线。
地形图南、北轮廓线上磁南和磁北之间的直线为地图的磁子午线。
一个点的磁北线与目标方向顺时针方向的线之间的水平角称为该点的磁方位角。
(3)坐标的方位角。
从一个点的坐标垂直线以北,顺时针方向的钱与目标方向的水平夹角称为该点的坐标方位角。
它广泛应用于方位测绘、地质和地球物理勘探、航空、航海、火炮射击和军队行军。
不同的方位角可以相互转换。
方位角

一、 方位角:以直线端点的子午线北端起算,顺时针方向量至直线的水平夹角,称为该直线的方位角。
(如图所示)
北
A
B
二、 方位角的计算
1、 坐标正方位角与坐标反方位角:设直线由A →B 方向的角аAB 为坐标正方位角,则相反方向的аBA 为坐标反方位角。
由于轴北方向处处平行,同一直线的坐标正、反方位角应相差180°,即а反=а正±180°(如图所示)
2
北(X)
BA
式中,:а正﹤180°时,+180°,反之-180°。
2、两直线的坐标方位角аBA、аBC与水平夹角之间的关系:
(如图所示)
北(X)
A
①当β为ABC前进方向的右角时(顺时针),则
аBC=аBA-β右
即计算式一:аBC=аAB±180°-β右
②当β为ABC前进方向的左角时(逆时针),则
β右=360°-β左
代入计算式一中,得计算式二:
аBC=аAB±180°+β左
3、理解:前一边BC的坐标方位角等于后一边AB坐标方
位角加(或减)两边所夹的左(或右)角,再±180°。
4、注意:在计算过程中,当(а后+β左或а后-β右)﹤180°
时,用+180°;反之,-180°。
计算的结果大于360°应减去360°,为负值时应加360°。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
方位角(azimuthangle):从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。
(一)方位角的种类由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。
(1)真方位角。
某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。
由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。
通常在精密测量中使用。
(2)磁方位角。
地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。
在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。
由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用Am表示。
(3)坐标方位角。
由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a表示。
方位角在测绘、地质与地球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。
不同的方位角可以相互换算。
军事应用:为了计算方便精确,方位角的单位不用度,用密位作单位。
换算作:360度=6000密位。
(二)三种方位角之间的关系因标准方向选择的不同,使得一条直线有不同的方位角。
同一直线的三种方位角之间的关系为:A=Am+δA=a+γa=Am+δ-γ(三)坐标方位角的推算1.正、反坐标方位角每条直线段都有两个端点,若直线段从起点1到终点2为直线的前进方向,则在起点1处的坐标方位角a12称为直线12的正方位角,在终点2处的坐标方位角a21称为直线12的反方位角。
a反=a正±180°式中,当a正<180°时,上式用加180°;当a正>180°时,上式用减180°。
2.坐标方位角的推算实际工作中并不需要测定每条直线的坐标方位角,而是通过与已知坐标方位角的直线连测后,推算出各直线的坐标方位角。
因β2在推算路线前进方向的右侧,该转折角称为右角;β3在推算路线前进方向的左侧,该转折角称为左角。
从而可归纳出推算坐标方位角的一般公式为:a前=a后+180°+β左a前=a后+180°-β右如果计算的结果大于360˚,应减去360°,为负值,则加上360˚。
天文学方位角定义:在地平坐标系中,通过南点、北点的地平经圈称子午圈。
子午圈被天顶、天底等分为两个180°的半圆。
以北点为中点的半个圆弧,称为子圈,以南点为中点的半个圆弧,称为午圈。
在地平坐标系中,午圈所起的作用相当于本初子午线在地理坐标系中的作用,是地平经度(方位)度量的起始面。
方位即地平经度,是一种两面角,即午圈所在的平面与通过天体所在的地平经圈平面的夹角,以午圈所在的平面为起始面,按顺时针方向度量。
方位的度量亦可在地平圈上进行,以南点为起算点,由南点开始按顺时针方向计量。
方位的大小变化范围为0°~360°,南点为0°,西点为90°,北点为180°,东点为270°。
上述这种方位度量是在天文学中所用的方法。
磁偏角简介沈括在中记载与验证了磁针“常微偏东、不全南也”400年。
英国人罗伯特·诺曼(Robert Norman)发现一根磁针用绳子在半中间吊起来,跟水平形成一偏角,他将这称为磁偏角。
1581年,他在自己的《新奇的吸引力》一书中发表了他的发现。
各个地方的磁偏角不同,而且,由于磁极也处在运动之中,某一地点磁偏角会随之间而改变。
许多海洋动物可以感应到磁偏角并利用它来识途。
向正北方向以东称东偏,偏向正北方向以西称西偏。
地磁要素磁偏角可以用磁偏测量仪测出来。
各地的磁倾角不同,在地磁极处,磁偏角是90度。
磁偏角的度数是测量出来的,不是计算出来的。
在绘图时,将此前对磁偏角的实际测量值标在地图(特别是海图,普通地图标磁偏角的少)上。
当然,磁偏角的变化呈现出一定的规律,我国东部地区磁偏角为西偏,甘肃酒泉以西多为东偏。
地磁极是接近南极和北极的,但并不和南极、北极重合,一个约在北纬72°、西经96°处;一个约在南纬70°、东经150°处。
磁北极距地理北极大约相差1500km. 在一天中磁北极的位置也是不停的变动,它的轨迹大致为一椭圆形,磁北极平均每天向北以40m。
磁北极大约于2005年进入俄罗斯境内。
东经25度地区,磁偏角在1-2度之间;北纬25度以上地区,磁偏角大于2度;若在西经低纬度地区,磁偏角是5-20度;西经45度以上,磁偏角为25-50度,在我国,正常情况下,磁偏角最大可达6度,一般情况为2-3度。
地图的方向:上北、下南、左西、右东是大多数地图的方向,但这可不是通用原则,如果地图上有方向标,可以通过方向标了解到这些。
磁偏角还是不断有规律变化的,地图上的磁偏角只是测图时的磁偏角(磁北比真北偏左,加上磁偏角;磁北比真北偏右,减去磁偏角;在我国一般是加上)。
使用地图本身所注的磁偏角要注意出版年限,地图太老误差较大。
计算方法关于用经纬度计算距离:40075.04公里,而@一圈分成360°,而每1°(度)有60,每一度一秒在赤道上的长度计算如下:40075.04km/360°=111.31955km111.31955km/60=1.8553258km=1855.3m 而每一分又有60秒,每一秒就代表1855.3m/60=30.92m 任意两点距离计算公式为d=111.12cos{1/[sinΦAsinΦB十cosΦAcosΦBcos(λB—λA)]} 其中A点经度,纬度分别为λA和ΦA,B点的经度、纬度分别为λB和ΦB,d为距离。
至于比例尺计算就不废话了也许上面的冗长又深奥的回复让你大头了吧? 简单地说,也就是 1.不同的地方2.正常情况下,我国磁偏角最大可达6度,一般情况为2-3度3.东经25度地区,磁偏角在1-2度之间;北纬25度以上地区,磁偏角大于2度;若在西经低纬度地区,磁偏角是5-20度;西经45度以上,磁偏角为25-50度,在我国,正常情况下,磁偏角最大可达6度,一般情况为2-3度。
不断变化的。
它有长期变化和短期变化。
地球磁场的短期变化即上述的偶极磁场。
地磁要素的长期变化,来源于地球内部的物质运动。
它首先表现为地磁场的向西漂移。
例如,0°磁偏线与赤道的交点,近400 年来已西移95°。
其次,磁场强度有稳定的衰减,近百年来,基本磁场强度衰减了5%。
如果照此速度继续衰减下去,那么,基本磁场将会在 2 千年后消失。
另外,磁极也在0°.004;其经度每年向西增加0°.007。
关于分类形态比较复杂,分平静变化和干扰变化。
平静变化是经常性和周期性的变化,有太阳日变化、太阴日变化和季节变化。
来自太阳的带电粒子,影响地球大气电离层的状况,从而造成各地的磁场以太阳日为周期的变化。
地磁强度的水平分量的太阳日变化,可达0. 03 ——0.04μT,约为水平分量的0. 5 %;地磁偏角的变化可达10′。
月球对于地球大气的潮汐作用,使得一部分大气以太阴日为周期,运行于地球各部分之间。
这种变化包括大气电离层的变化,因而造成各地磁场以太阴日为周期的变化。
它的变化幅度很小,磁场强度水平分量的变幅只有千分之几μ T,约为水平分量的0. 05%;地磁偏角的变幅不到40″。
太阳直射点的南北移动,以及随之而来的太阳辐射能在地球上的分布的季节变化,造成地磁要素的太阳日变化的幅度因季节而变化。
一般地说,夏季太阳日变化的幅度较大,冬季较小。
地磁要素的十扰变化要复杂得多。
小的干扰多半是区域性的,次数频繁,变幅很小。
大的干扰是全球性的,次数较少,平均每年10 次左右,变化幅度较大。
特大的干扰称磁暴。
磁暴发生时,磁针不安地扰动不止;在几小时到几日内,磁场强度的变化可达十分之几甚至几个μT。
磁暴的发生与太阳活动直接相关。
来自太阳的高能粒子,不仅干扰地球磁场,同时破坏大气电离层结构,中断无线电通讯,高纬度地区出现极光。
中国各地磁偏角地质罗盘的使用方法地质罗盘地质罗盘又称“袖珍经纬仪”。
野外地质工作不可缺少的工具。
主要包括磁针、水平仪和倾斜仪。
结构上可分为底盘、外壳和上盖,主要仪器均固定在底盘上,三者用合页联结成整体。
可用于识别方向、确定位置、测量地质体产状及草测地形图等。
原理地质罗盘上有一个指针,用它指明磁子午线的方向,可以粗略确定目标相对于磁子午线的方位角,并利用水准器装置测其垂直角(俯角或仰角)以确定被测物体所处的位置。
结构地质罗盘式样很多,但结构基本是一致的,我们常用的是圆盆式地质罗盘仪。
由磁针、刻度盘、测斜仪、瞄准觇板、水准器等几部分安装在一铜、铝或木制的圆盆内组成,如图4-1-1 (一)磁针——一般为中间宽两边尖的菱形钢针,安装在底盘中央的顶针上,可自由转动,不用时应旋紧制动螺丝,将磁针抬起压在盖玻璃上避免磁针帽与项针尖的碰撞,以保护顶针尖,延长罗盘使用时间。
在进行测量时放松固动螺丝,使磁针自由摆动,最后静止时磁针的指向就是磁针子午线方向。
由于我国位于北半球磁针两端所受磁力不等,使磁针失去平衡。
为了使磁针保持平衡常在磁针南端绕上几圈铜丝,用此也便于区分磁针的南北两端。
(二)水平刻度盘——水平刻度盘的刻度是采用这样的标示方式:从零度开始按逆时针方向每10度一记,连续刻至360度,o度和180度分别为N和S,90度和270度分别为E和W,利用它可以直接测得地面两点间直线的磁方位角。
(三)竖直刻度盘——专用来读倾角和坡角读数,以E或W位置为0度,以S或N为90度,每隔10度标记相应数字。
(四)悬锥——是测斜器的重要组成部分,悬挂在磁针的轴下方,通过底盘处的觇板手可使悬锥转动,悬锥中央的尖端所指刻度即为倾角或坡角的度数。
(五)水准器——通常有两个,分别装在圆形玻璃管中,圆形水准器固定在底盘上,长形水准器固定在测斜仪上。
(六)瞄准器——包括接物和接目觇板,反光镜中间有细线,下部有透明小孔,使眼睛,细线,目的物三者成一线,作瞄准之用。
在使用前必须进行磁偏角的校正。
因为地磁的南、北两极与地理上的南北两极位置不完全相符,即磁子午线与地理子午线不相重合,地球上任一点的磁北方向与该点的正北方向不一致,这两方向间的夹角叫磁偏角。
地球上某点磁针北端偏于正北方向的东边叫做东偏,偏于西边称西偏。
东偏为(+)西偏为(-)。
地球上各地的磁偏角都按期计算,公布以备查用。
若某点的磁偏角已知,则一测线的磁方位角A磁和正北方位角A的关系为A等于A 磁加减磁偏角。
应用这一原理可进行磁偏角的校正,校正时可旋动罗盘的刻度螺旋,使水平刻度盘向左或向右转动,(磁偏角东偏则向右,西偏则向左),使罗盘底盘南北刻度线与水平刻度盘0--180度连线间夹角等于磁偏角。