第三章_单自由度机械系统动力学案例
机械振动--第03课 单自由度系统:阻尼自由振动
内容总结
第四课 单自由度系统: 阻尼自由振动。库仑阻尼与结构阻尼。库仑阻尼与结构阻尼。比如汽车上常用的液压筒式减振器,其内部的工 作缸被活塞分成上下两腔,并充满液体。当活塞与工作缸有相对运动时,强迫液体经过活塞上的阀在上下腔运 动,液体经脱阀时产生的阻力,使运动能量变为热能耗散掉。在理论分析中最常用的阻尼是气体和液体的粘性 阻尼,它是由于气体或液体在某些机械部件中运动,因而扩散到气体或液体中的热量等能量耗散的度量。例 题
(2.3-2)
第十一页,共32页。
粘性阻尼振动系统
s1,2
c 2m
c
c
2
k
2m 2m m
c
2
2m
k m
c 2m
c
i
2m
k c 2 m 2m
k
c
c
2
k
2m m
c
2
k
2m m
c 2 k 2m m
x m
第十二页,共32页。
粘性阻尼振动系统
考虑 x Aest Aeσ iω ( Aeσ )eiω ,如果 0 ,则物体的运动将不
fd jx
式中 为结构阻尼系数,它与刚度 k 成正比,
gk
式中 g 为结构阻尼损耗因子,或称结构阻尼比。结构阻尼系统运动
方程为
mx kx jx f
第三十页,共32页。
Homework
▪ Write the differential equation of motion for the system in the following figure and determine the natural frequency of damped oscillation and critical damping coefficient.
机械振动 第3章-单自由度系统的振动

kx H sin(t ) m x
2 令 n k , h H 则 m m 2 x x h sin(t ) n
无阻尼受迫振动微分方程的标准形式 ,二阶常系数非齐次线性微分方程。
x x1 x2
x1 A sin( n t ) 为对应齐次方程的通解 x2 b sin(t ) 为特解 h h b 2 , x sin(t ) 2 2 2 2 n n h x A sin( t ) sin(t ) 全解为 n 2 2 n :
——初相位,决定振体运动的起始位置。
T ——周期,每振动一次所经历的时间。
2 f —— 频率,每秒钟振动的次数, f = 1 / T,T 。 n n —— 固有频率,振体在2秒内振动的次数。
n 1 c fn 2 2 a
n反映振动系统的动力学特性,只与系统本身的固有参数有关。
则自由振动的微分方程的标准形式 : 2
q q 0
其解为 也可以写成 有
q A sin(nt ) q C1 cos nt C2 sin nt
2 1 2 2
A C C
C1 tg C2
1
6
对于初始扰动引起的自由运动
=q 0 设 t = 0 时, q = q0 , q
单自由度系统无阻尼自由振动
一、自由振动的例子
J
k
实验确定转动惯量装置
5
二、单自由度系统无阻尼自由振动微分方程及其解 对于任何一个单自由度系统,以q 为广义坐标(从平衡位 置开始量取 ),则自由振动的运动微分方程必将是:
c a, c是与系统的物理参数有关的常数,令 a
2 n
第三章_单自由度机械系统动力学

m j Fk vk cos k F Me ( ) ( M j ) q q k 1 j 1 m
、vk / q 是由机构的尺度和位置决定的, Me表示式中的广义传动比 j / q 的变化无关。 Me仅仅是机构广义坐标q的函数,与广义速度 q
基本概念
1、等效构件 具有与原机械系统等效的质量或等效转动惯量、其上 作用有等效力或等效力矩,而且其运动与原机械系统相应 构件的运动保持相同的构件。 2、等效条件 (1) 等效构件所具有的动能等于原机械系统的总动能; (2) 等效构件的瞬时功率等于原机械系统的总瞬时功率。 3、等效参数 (1) 等效质量me,等效转动惯量Je; (2) 等效力Fe,等效力矩Me。
1 G1 2 r 2 i g 1 20 (0.00715 0.15 2 0.00252 )kg.m 2 40 9.18 0.007256 kg.m 2 J e J1 J 2
加载后,还应加上重物的等效转动惯量
GR2 1 Je Je g r2 4000 0.12 1 (0.007256 2 )kg.m 2 9.81 40 0.009804 kg.m 2
2 M e ( )d 0 J e ( ) J e ( )
2 0
J e0
= ()
( )
变换后积分
d t0 dt 0 ( )
t
d dt
t t0
d 0 ( )
= (t)
3、驱动力是速度的函数,例如一般的电动机,机械特性均表示为输
出力矩随角速度变化的曲线。
二、三相异步电动机的机械特性
如图所示,三相异步电动机的输出力矩随角速度变化的曲线,称 为机械特性。AC段的运转是稳定的,当外载荷加大而导致机械减速 时,输出力矩将增加,并与外载荷达到新的平衡。而AD段的运转是 不稳定的,而外载荷增加导致转速下降时,输出力矩也下降,更无法 与外载荷平衡,造成转速进一步下降,直至停车。因此三相异步电动 机应在AC段工作。点B是电动机的额定工作点。
自由度机械系统动力学分析
06
结论与展望
研究成果总结
01
02
03
04
自由度机械系统动力学分析在 理论和实践方面取得了重要进 展,为复杂机械系统的动态性 能分析和优化设计提供了有力 支持。
自由度机械系统动力学分析在 理论和实践方面取得了重要进 展,为复杂机械系统的动态性 能分析和优化设计提供了有力 支持。
自由度机械系统动力学分析在 理论和实践方面取得了重要进 展,为复杂机械系统的动态性 能分析和优化设计提供了有力 支持。
自由度机械系统动力学分析
目
CONTENCT
录
• 引言 • 自由度机械系统基础 • 自由度机械系统动力学分析方法 • 自由度机械系统动态特性分析 • 自由度机械系统优化设计 • 结论与展望
01
引言
背景介绍
机械系统在工业、航空航天、交通运输等领域广泛应用,其动力 学性能对系统的稳定性和性能至关重要。
结合人工智能、大数据等先进技术,开展自由度 机械系统动力学分析与优化设计,实现智能化、 自动化的动态性能预测和优化设计。
拓展自由度机械系统动力学分析的应用领域,特 别是在智能制造、新能源、生物医学工程等新兴 领域,发挥其在技术创新和产业升级中的作用。
THANK YOU
感谢聆听
稳定性分析
线性稳定性分析
通过判断系统的线性化方程的解的稳定性,确定系统的稳定性。常用的方法有 特征值法和Lyapunov直接法。
非线性稳定性分析
研究非线性系统的稳定性,需要考虑系统的非线性特性,常用的方法有分岔理 论和混沌理论。
振动特性分析
固有频率和模态分析
通过求解系统的运动微分方程,得到系统的固有频率和模态,即系统自由振动的频率和振型。
02
第3章 单自由度系统
来描述。将A、B、C三点的M、 值代入可得到一个线性方程组:
解方程组可得到系数
式中
用B、C两点构造一条直线,则M为 的一次函数,可参看例题3.2.1
例题3.2.1某用于起吊重物的电动葫芦的电动机,型号为 额定功率
,同步转速 ,额定转速 求该电动机在额定转速附近的机械特性。
生产阻力:完成有用功时,作用于机械上的阻力,此力作负功。
重力:它随重心向上运动或向下运动而作负功或正功,在一个循环内作功为零。在许多情
况下(尤其是高速机械中)重力可以忽略不计,但对不少重型机械要计及重力。
摩擦力:由运动副表面摩擦产生的有害阻力,作负功。在许多情况下可忽略不计,但对一
些效率较低的机构则应计入摩擦力的影响。
图3.2三相交流异步电动机机械特性
图3.2.1所示为三相异步电动机的机械特性。其中AC段运转是稳定的,当外载荷加大而导致机械减速时,输出力矩将增加,并与外载荷达到新的平衡。而在AD段运转是不稳定的,当外载荷增加导致转速下降时,输出力矩也下降,更无法与外载荷平衡,造成转速进一步下降,直至停车。因此三相异步电动机应在AC段工作。
图3.3.2曲柄滑块机构
例题3.3.2在图3.3.2所示之曲柄滑块机构中,已知:曲柄长 ,连杆长 ,点B到连杆质心 的距离 ,连杆质量 ,滑块质量 ,曲柄对其转动中心的转动惯量 ,连杆对其质心 的转动惯量 。用数值方法计算以曲柄为等效构件时的等效转动惯量 及其导数 随转角的变化规律。
解 用平面连杆机构分析的解析方法可以列出机构各杆的角速度、角加速度的表达式和各杆质心的速度、加速度的表达式。然后利用式(3.3.1)计算等效转动惯量。
式中
《机械原理自由度》课件
机械故障诊断
通过运动分析诊断机械故障的原因 和位置。
控制系统设计
利用运动分析结果设计控制系统的 参数和策略。
机构运动分析的实例
平面四杆机构的运动分析
01
通过解析法计算平面四杆机构的自由度,并分析其运动特性。
凸轮机构的运动分析
02
利用实验法测量凸轮机构的位移、速度和加速度,分析其运动
规律。
机器人臂关节的运动分析
03
通过数值法模拟机器人臂关节的运动行为,优化关节的设计参
数。
04
机构动力学分析
机构动力学的基本概念
机构动力学是研究机 械系统中机构运动及 其与力的关系的学科 。
机构动力学的基本概 念包括力、力矩、加 速度、速度和位移等 。
它涉及到系统的平衡 、运动规律、动态响 应等方面的内容。
机构动力学分析的Байду номын сангаас法
空间机构自由度计算
总结词
空间机构自由度计算是机械原理中一个复杂的概念,它涉及到机构在空间中的 运动自由度数。
详细描述
空间机构的自由度计算公式为F=6n-(3PL + Ph),其中n为活动构件数,PL为低 副数,Ph为高副数。与平面机构不同,空间机构需要考虑三个方向的自由度, 因此计算更为复杂。
特殊机构自由度计算
通过建立平面连杆机构的运动学和动力学模型,分析其运动规律 和动态响应。
凸轮机构的动力学分析
研究凸轮机构的动态行为,包括从动件的运动规律和受力情况等。
齿轮机构的动力学分析
分析齿轮机构的动态特性,如振动、冲击和噪声等,以提高齿轮传 动的平稳性和可靠性。
05
机构优化设计
机构优化设计的目标和方法
目标
单自由度机械系统动力学——牛头刨床运动例题

单自由度机械系统动力学作业题目:图1所示为一牛头刨床。
各构件长度为:1110L mm =,3540L mm =,4135L mm =;尺寸580H mm =,1380H mm =。
导杆3重量3200G N =,质心3S 位于导杆中心,导杆绕3S 的转动惯量23 1.1J kg m =⋅。
滑枕5的重量5700G N =。
其余构件重量均可不计。
电动机型号为Y100L2-4,电动机轴至曲柄1的传动比23.833i =,电动机转子及传动齿轮等折算到曲柄上的转动惯量21133.3J kg m =⋅。
刨床的平均传动效率0.85η=。
空行程时作用在滑枕上的摩擦阻力50f F N =,切削某工件时的切削力和摩擦阻力如图2所示。
1)求空载启动后曲柄的稳态运动规律; 2)求开始刨削工件的加载过程,直至稳态。
图1 牛头刨床 图2 牛头刨床加工某工件时的负载图 解:(1)运动分析可以用解析法列出各杆角速度、各杆质心速度的表达式。
但为简便起见,现调用改自课本附录Ⅰ中的Matlab 子程序来进行计算。
图1中给出了构件和运动副的编号。
先调用子程序crank 分析点②的运动学参数,再调用子程序vosc 进行滑块2—导杆3这一杆组的运动学分析,然后再调用子程序vguide 进行小连杆4—滑枕5这一杆组的运动学分析。
这一段的Matlab 程序如下:crank(1,2,L(1),TH(1),W(1)); vosc(2,3,4,L(3)); vguide(4,5,L(4)); 其中:L(i)、TH(i)、W(i)分别表示第i 个杆的长度、位置角、角速度。
(2)等效转动惯量和等效力矩取曲柄1为等效构件,等效转动惯量为2223335513111()()()S e J J J G v G v g g ωωωω=+++ (a) 式中:g 为重力加速度,3S v 为导杆3质心的速度,5v 为滑枕的速度。
等效驱动力矩可由电动机机械特性导出,设m M 、de M 分别为电动机输出力矩和等效驱动力矩,两者有如下关系:de m M iM = (b)式中i 为电动机轴和曲轴间的传动比。
机械系统动力学 第三章 机械系统运动微分方程的求解2
3-3机械系统的运动方程求解方法-半解析数值法
解: 2)求 与 t之间的关系
图3-3-9 等效力矩与时间的关系 图3-3-8 等效转动惯量的导数的变化规律
3-3机械系统的运动方程求解方法-半解析数值法
图3-3-10 曲柄角速度与时间的关系
3-3机械系统的运动方程求解方法-半解析数值法
二、等效力矩是等效构件和角速度的函数 Me Me ,
3-2机械系统的运动方程求解方法-数值法
3-2-1 欧拉法
对于常微分方程的定解问题,形如
y f (x, y)
y(x0 )
y0
3-2-1
所谓数值解法, 就是寻求解 y(x) 在一系列离散节点
x1 x2 xn xn1 上的近似值 y1, y2 , , yn , yn1 。
相邻两个节点的间距 hn xn1 xn
一、等效力矩是等效构件转角的函数时,即 M e M e
对上式积分:
ห้องสมุดไป่ตู้ 1
2
J e
2
1 2
J e0 02
0
Me
d
W
J e0 0 2 2W Je
3-3机械系统的运动方程求解方法-半解析数值法
由 d dt d
dt
t t0
d 0
例3-3-1:对于3-2-1所示的偏置曲柄滑块机构,若已
2!
3! t
3-2机械系统的运动方程求解方法-数值法
3-2-2 Newmark- 法
x(t t) x(t) x(t)t x(t) t2 x (t) t3 o(t4)
2!
3!
线性加速度法的迭代公式 1
大致具有3阶精度,将上式的最后一项中
即为Newmark- 法。其迭代公式为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§3.3 单自由度机械系统的动力学方程
一、拉格朗日方程 拉格朗日方程: Ek E p d Ek ( ) Fi (i 1,2,...,n) dt qi qi qi
式中:Ek——系统的动能; Ep——系统的势能; qi——广义坐标,它是可以完全确定机械系统运动的一组独立 参数; Fi——广义力,当广义坐标为一角位移时Fi为一个力矩,当广 义坐标为一线性位移时Fi为一个力; n——系统的广义坐标数。 利用拉格朗日方程进行系统的动力学分析时,先选定系统的广 义坐标,然后列出系统动能、势能和广义力的表达式,代入拉格朗 日方程中,即可导出系统的动力学方程。
二、单自由度机械系统的动力学方程 单自由度系统只有一个广义坐标,用q表示。对主动构件做回转 运动这种一般情况,常将主动构件的转角选定为系统的广义坐标。 整个系统的能量和机械功均可表示为这个广义坐标的函数。 1、系统的动能 设机械系统中的第i个构件做一般平面运动,启动能Eki可表示为
Eki 1 1 2 mi v 2 J Si si i 2 2
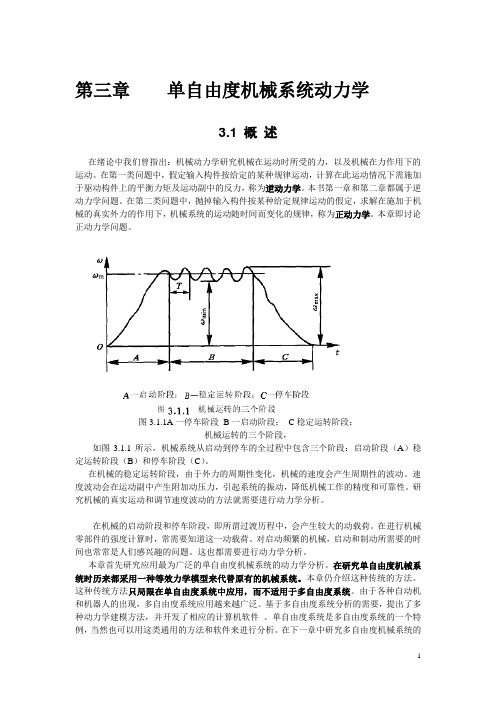
§3.1 概 述
机械的真实运动规律是由作用于机械上的外力、各 构件的质量、尺寸及转动惯量等因素决定的,而研究机 械在外力作用下的真实运动则是机械动力学的基本问题 (机械动力学的正问题)。本章主要研究两个问题: 第一,研究单自由度机械系统在外力作用下的真实 运动规律,即机械系统的运动随时间的变化规律。掌握 通过建立动力学模型建立力与运动参数之间的运动微分 方程来研究真实运动规律的方法。
P ( Fk vk cos k ) ( M j j )
k 1 j 1 m n
式中:ωj——有外力矩Mj作用的构件的角速度; vk——外力Fk作用点的速度; αk——Fk与vk的夹角。 式中第二项符号的确定方法为:当Mj与ωj同向时取正号,反向时取负号。
广义力就是作用在广义坐标处的一个力或力矩,它所作的功等于系统中 全部力和力矩在同一时间内所作的功。
第二,研究机械运转速度波动产生的原因及其调节 方法。
机械运转的三个阶段
1.启动阶段 原动件的速度由零逐渐上升到开始稳定的过程。 2.稳定运转阶段 1)周期变速稳定运转:角速度ω≠常数,产生周期性波动,会在运动副 中产生附加动反力,需进行动力学分析。 2)等速运转:ω=常数的稳定运转。 3.停车阶段 原动件的速度从正常工作速度下降到零的阶段。 在启动和制动阶段是会产生较大的动载荷,需进行动力学计算。
例题
某起吊重物用的电动葫芦的电动机,型号为Y90L-4,额定功率 PH=1.5kW,同步转速n0=1500r/min,额定转速nH=1410r/min,求 该电动机在额定转速附近的机械性能。
解:在加载过程中电动机角速度只在额定角速度附近波动,可采用 直线形式的机械特性
例题
电动机型号Y100L2-4,额定功率PH=3kW,同步转速n0=1500r/min, 额定转速nH=1420r/min,最大转矩与额定转速之比λ=MK/MH=2.2,推导出三 相异步电动机机械特性图中AC段的机械特性。
广义坐标为一个角位移时,广义力F为一等效力矩Me,它可按下式计算:
生产阻力的几种情况:
1、生产阻力为常数,例如起重机、轧钢机、刨床等。 2、生产阻力随位移而变化,例如活塞式的压缩机和泵、曲柄压力机 等。
3、生产阻力随速度而变化,例如鼓风机、离心泵、螺旋桨。
4、生产阻力随时间而变化,例如球磨机、揉面机等。
驱动力的几种情况:
1、驱动力是常数,例如以重锤作为驱动装置的情况; 2、驱动力是位移的函数,例如用弹簧作驱动件时;
式中:mi——构件i的质量; JSi——构件i相对于其质心的转动惯量; vSi——构件i质心的速度; ωi——构件i的角速度。 作平动的构件的动能只含上式的第一项,作绕质心的定轴转动 的构件则只含第二项。
机械系统全部构件的动能总和为
1 1 2 Ek Eki ( mi v 2 J Si i ) si 2 i 1 i 1 2
式中l为活动构件总数 动能也可以表示为
l
l
Ek
式中
1 2 J eq 2
J e [mi (
i 1
l
vSi 2 ) J Si ( i ) 2 ] q q
称为广义速度,是随时间变化的。 Je称为系统的等效转动惯量。 q
2、系统的势能 对刚体机械系统,不计构件的弹性变形和变形能,而且一般情 况下,由构件的重量产生的势能与动能相对数值也很小,因此拉格 朗日方程中的势能常常可以略去。 3、系统的广义力 设Fk(k=1,2,…,m)和Mj(j=1,2,…,n)分别为作用于机 械上的外力和外力矩,则这些力和力矩的功率为
电机铭牌上给出如下数据: 额定功率PH(kW),额定转速nH (r/min),同步转速n0(r/min); 最大转矩MK与额定转矩MH的比值 λ=MK/MH; 启动转矩MD与额定转矩MH的比值
λ1=MD/MH
通过铭牌上得数据可确定机械特性曲线上四个特征点的坐标:A(MK,ωK), A(MH,ωH), A(0,ω0), A(MD,0)。
§3.2 作用在机械上的力
一、作用在机械上的力的特征
在机械上作用的力:
驱动力 由原动机发出并传给驱动构件的力,此力在一个运动循环內作正
功。
生产阻力 完成有用功时作用于机械上的阻力,此功做负功。
重力
当构件的重心向上运动或向下运动时分别作负功或正功,在一个 循环内作功为零。 摩擦力 由运动副表面的摩擦产生的有害阻力,作负功。
3、驱动力是速度的函数,例的曲线。
二、三相异步电动机的机械特性
如图所示,三相异步电动机的输出力矩随角速度变化的曲线,称 为机械特性。AC段的运转是稳定的,当外载荷加大而导致机械减速 时,输出力矩将增加,并与外载荷达到新的平衡。而AD段的运转是 不稳定的,而外载荷增加导致转速下降时,输出力矩也下降,更无法 与外载荷平衡,造成转速进一步下降,直至停车。因此三相异步电动 机应在AC段工作。点B是电动机的额定工作点。