工程矩阵论课后习题答案(张明淳)
矩阵论(华中科技大学)课后习题答案(1)
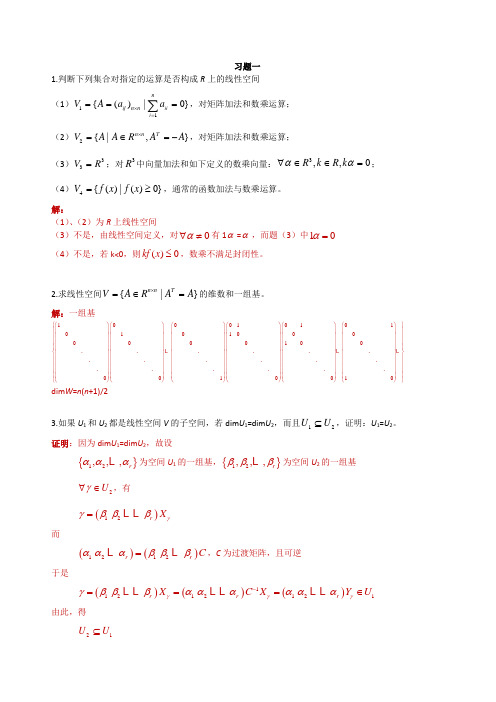
习题一1.判断下列集合对指定的运算是否构成R 上的线性空间 (1)11{()|0}nij n n iii V A a a⨯====∑,对矩阵加法和数乘运算;(2)2{|,}n n T V A A R A A ⨯=∈=-,对矩阵加法和数乘运算;(3)33V R =;对3R 中向量加法和如下定义的数乘向量:3,,0R k R k αα∀∈∈=; (4)4{()|()0}V f x f x =≥,通常的函数加法与数乘运算。
解: (1)、(2)为R 上线性空间(3)不是,由线性空间定义,对0α∀≠有1α=α,而题(3)中10α= (4)不是,若k<0,则()0kf x ≤,数乘不满足封闭性。
2.求线性空间{|}n nT V A R A A ⨯=∈=的维数和一组基。
解:一组基10001010101010000000100..................0010010⎧⎫⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎬⎪⎪⎪⎪⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪ ⎪⎪⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭⎩⎪⎪⎪⎪⎭dim W =n (n +1)/23.如果U 1和U 2都是线性空间V 的子空间,若dim U 1=dim U 2,而且12U U ⊆,证明:U 1=U 2。
证明:因为dim U 1=dim U 2,故设{}12,,,r ααα为空间U 1的一组基,{}12,,,r βββ为空间U 2的一组基2U γ∀∈,有()12r X γγβββ=而()()1212r r C αααβββ=,C 为过渡矩阵,且可逆于是()()()11212121r r r X C X Y U γγγγβββαααααα-===∈由此,得 21U U ⊆又由题设12U U ⊆,证得U 1=U 2。
《矩阵论》习题答案,清华大学出版社,研究生教材习题 2.2

= k1 1 ( 1 , ) k 2 2 ( 2 , ) = k1 H 1 k 2 H 2 故 是线性变换.又因为
( H , H ) ( ( , ) , ( , ) ) ( , ) ( , ) 2 ( 2 2 )
, (i 1, , n 2) .如此
又因为各行与第 n 1 行正交,故 ai ,n1 0 由下往上逐行递推,即得结果.
8
17. 证:因为
( A S )( A S ) ( A S ) ( A S ) ( A S )
1 T 1 T T
5. 证:由 ( ( ( 得
cos , ( , )
( ), ( ), (β),
(β))= ( , β) ( ))=( , ) (β))= (β, β)
. ( ), (β))/| ( ), (β)> ( ) || (β)) |
= (
= cos<
1
1
,使
1
( 1 ) 1 . 令
1
( j ) j ( j 2,3, , n) ,如果 j j , j 2,3, , n ,则
2
=
,结论
成立.否则可设 2 2 ,再作镜面反射
2
:
2 2 2 2
( ) 2( , ) ,
于是
2
( 2 ) 2 ,且可验算有
2
(1 ) 1 .
如此继续下去,设经 s 次正交变换
1 , 2 , n , 1 , 2 , , n
1 , 2 , 3, , n 1 , 2 , , n
矩阵论试题参考答案(2011年)

cos Atdt
0
1
3t sin t 3t sin t cos t 2sin1 3cos1 3sin1 3cos1 dt . 0 3t sin t 3t sin t cos t 3sin1 3cos1 4sin1 3cos1
A b 0,
故 A 0. 2) C, A C 3) A, B C
n n
n n
,
A
A a A b
2
2
2
Aa
2
2
Ab A .
2
,记 x
A a B a , y A B , 则 A x 2 , b b
k k k
证法 3.由 A A 可得:k 1 有 A A ,故 lim A A 0 ,因而 A 不是收敛矩 阵,从而 A 1, 三、(20 分) 设 A
A a A 1 .
4 3 . 3 2
1.(6 分) 求
dF x x1 T ,其中 x , F x x A ; T dx x2
的实轴上, G1 , G2 , G3 的半径依次为
'
'
'
2 3 17 1 3 11 1 2 17 ' ' . , R2 2 , R3 2 2 3 4 12 2 4 16 2 3 36 综合前面的结论可知 A 的 3 个特征值所在的 3 个实数区间分别为
从而 A 只有实特征值, 它们分别位于 A 的 3 个 1 知 A 的每个盖尔圆中只有 A 的一个特征值, 盖尔圆的实轴上,由此得到 A 的 3 个特征值所在的 3 个实数区间分别为
工程矩阵理论

精彩摘录
精彩摘录
《工程矩阵理论》是一本深入浅出,理论与实践相结合的优秀教材。它用清 晰的语言和丰富的例子,为读者揭示了矩阵理论在工程领域中的广泛应用和深远 影响。以下是本书中的一些精彩摘录,它们从不同的角度展示了矩阵理论的魅力 和重要性。
精彩摘录
“矩阵不仅是数学中的一个基本工具,也是工程师解决实际问题的重要武器。 在信号处理、控制系统、电路设计、图像处理等领域,矩阵理论都发挥着不可替 代的作用。”这段话强调了矩阵理论在工程实践中的广泛应用,提醒我们要重视 矩阵理论的学习和应用。
目录分析
目录分析
《工程矩阵理论》是一本专注于工程领域的矩阵理论教材,其目录结构精心 组织,内容深入且全面。本书旨在向工科研究生提供关于矩阵论的深入理解和应 用技能。以下是对这本书目录的详细分析。
目录分析
目录首先引入了“线性空间与线性映射”这一章节。线性空间是矩阵理论的 基础,它定义了向量空间的性质和运算规则。线性映射则描述了线性空间之间的 变换关系,这是理解矩阵在空间中如何操作的关键。
精彩摘录
“矩阵的秩是矩阵理论中的一个核心概念,它反映了矩阵行列之间的线性关 系。在解决实际问题时,通过计算矩阵的秩,我们可以判断系统的可控性、可观 性、稳定性等关键性质。”这段话揭示了矩阵秩在工程问题中的重要应用,体现 了矩阵理论在解决实际问题中的价值。
精彩摘录
“特征值和特征向量是矩阵理论中的两个重要概念,它们与矩阵的对角化、 相似变换等概念紧密相关。在控制系统的稳定性分析、信号处理中的滤波器设计 等领域,特征值和特征向量的应用广泛而深入。”这段话展示了特征值和特征向 量在矩阵理论中的重要地位,以及它们在工程实践中的应用。
精彩摘录
“矩阵分解是矩阵理论中的一个重要方法,它可以将一个复杂的矩阵分解为 几个简单的矩阵的乘积。通过矩阵分解,我们可以简化计算过程,揭示矩阵的内 在结构,为解决实际问题提供便利。”这段话阐述了矩阵分解的重要性和应用, 体现了矩阵理论在解决实际问题中的灵活性和实用性。
东南大学工程矩阵理论试题及答案

et = f(1) = g(1) = c0(t) + c1(t) + c2(t), (1+t)et = f ¢(1) = g¢(1) = c1(t) + 2c2(t), 由此可得 c0(t) = 0, c1(t) = (1-t)et, c2(t) = tet, 于是有 AeAt = (1-t)etA + tetA2.
0ö æ1 1÷ø çè1
2 2
ö ÷ø
=
æ çè
0 1
0 2
ö ÷ø
=
0E11
+
0E12
+
1E21
+
2E22,
æ1 1 0 0ö
由此可见
f
在
£2´2
的基
E11,
E12,
E21,
E22
下的矩阵
A
=
ç ç ç
2 0
2 0
0 1
0÷
1
÷ ÷
.
è0 0 2 2ø
张小向@seu
2
◆ 工程矩阵理论 ◆ 试题一 ◆ 答案仅供参考 ◆
2 a -1
0
3ö 4 ÷ , r(A-I) = 0 ÷ø
1, 2,
a = 8 / 3; a ¹ 8 / 3,
æ1 0 0 ö
æ1 1 0ö
当 a = 8/3 时, A 的 Jordan 标准形为 ç 0 1 0 ÷ ; 当 a ¹ 8/3 时, A 的 Jordan 标准形为 ç 0 1 0 ÷ .
则 QHQ = I, aHQ = (1, 0, ..., 0), QHa = (1, 0, ..., 0)H,
æ1+ k 0 L 0ö
工程矩阵理论
双语国际教育版系统分析的数学工具——工程矩阵理论(适用于数学专业和其它理工科研究生)倪郁东编著合肥工业大学数学学院目录第一章线性空间与线性变换 1 §1.1 线性空间 1§1.2 线性变换及其矩阵 3§1.3 内积空间8§1.4 正交变换及其几何与代数特征§1.5 应用于小波变换的框架理论15 第二章矩阵的标准形理论§2.1 线性变换的特征值和特征向量29 §2.2 矩阵的相似对角化32 §2.3 特征矩阵的Smith标准形34 §2.4 矩阵的Jordan标准形34 §2.5 矩阵的最小多项式第三章矩阵分解29 §3.1 Gauss消去法与矩阵三角分解29 §3.2 矩阵的QR分解32 §3.3 矩阵的满秩分解34 §3.4 矩阵的奇异值分解34§3.5 矩阵分解的应用第四章矩阵范数理论及其应用16 §4.1 范数与赋范线性空间§4.2 向量范数及其性质17 §4.3 矩阵的范数18 §4.4 范数的应用19 第五章矩阵分析及其应用20 §5.1 矩阵序列20 §5.2 矩阵级数21 §5.3 矩阵函数22 §5.4 矩阵的微分和积分25 §5.5 矩阵函数的一些应用26 §5.6 梯度分析和最优化27 第六章特征值估计及极性38 §6.1 特征值的估计38 §6.2 广义特征值问题40 §6.3 对称矩阵特征值的极性41 §6.4 广义特征值分析的应用42 第七章广义逆矩阵43 §7.1 投影矩阵43 §7.2 广义逆矩阵46 §7.3 总体最小二乘方法49第八章Matlab中的矩阵运算简介50 §8.1 基本矩阵运算50 §8.2 矩阵分解52 §8.3 广义逆矩阵和解线性系统54 参考文献57编著者说明1、体例格式为:知识要点,章节内容,各章习题。
研究生 矩阵论 课后答案

|
xk
|2
)
1 2
是范数.
k =1
(2)证明函数 || x ||∞ = max{| x1 |,| x2 |,...,| xn |}是范数.
2.设
x∈R2,
A=
⎛4 ⎜⎝1
1⎞ 4⎟⎠
,请画出由不等式||
x
||
A
≤
1决定的x的全
体所对应的几何图形.
3.在平面 R2中将一个棍子的一端放在原点,另一端放
生成子空间V,求V的正交补空间V ⊥.
15.(MATLAB)将以下向量组正交化.
(1) x1 = (1,1,1)T , x2 = (1,1, 0)T , x3 = (1, −1, 2);T
(2) f (t) = 1, g(t) = t, h(t) = t2是[0,1]上的多项式空间
的基,并且定义(
f
9.把下面矩阵A对应的λ -矩阵化为Smith标准形,并且写
出与A相似的Jordan标准形.
⎛1 −1 2 ⎞
(1)
⎜ ⎜
3
−3
6
⎟ ⎟
⎜⎝ 2 − 2 4⎟⎠
⎛ −4 2 10⎞
(2)
⎜ ⎜⎜⎝
−4 −3
3 1
7 7
⎟ ⎟⎟⎠
⎧ dx1
⎪ ⎪
dt
=
3x1
+ 8x3
10.(MATLAB)求解微分方程:
α3 = (0,1,1)T 的矩阵为: ⎡ 1
A=⎢ 1 ⎢⎣−1
0 1⎤ 1 0⎥ 2 1⎥⎦
求在基e1 = (1,0,0)T ,e2 = (0,1,0)T ,e3 = (0,0,1)T下的矩阵.
10.设S = {ε1,ε2 ,ε3,ε4}是四维线性空间V的一个基,已知
矩阵论课后习题答案

第一章 线性空间与线性映射 习题一 (43-45)1、(1)对于V y x ∈∀,,x y x y x y x y y x y x y x y x +=⎪⎪⎭⎫⎝⎛+++=⎪⎪⎭⎫ ⎝⎛+++=+112211112211;(2)对于V z y x ∈∀,,,⎪⎪⎭⎫ ⎝⎛+++++++=⎪⎪⎭⎫⎝⎛+++++++=⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+++=++))()(1111112221111112112211121112211z y z x y x z y x z y x y x z z y x y x z y x z z y x y x y x z y x ,⎪⎪⎭⎫ ⎝⎛+++++++=⎪⎪⎭⎫⎝⎛+++++++=⎪⎪⎭⎫ ⎝⎛++++⎪⎪⎭⎫ ⎝⎛=++))()(1111112221111111122211111221121z y z x y x z y x z y x z y x z y z y x z y x z y z y z y x x z y x ,即)()(z y x z y x ++=++。
(3)对于⎪⎪⎭⎫⎝⎛=00θ和V x ∈∀,显然x x x x x x x =⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫⎝⎛+++=+21121000θ; (4)对于V x ∈∀,令⎪⎪⎭⎫⎝⎛--=2211x x x y , 则θ=⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛--+-=⎪⎪⎭⎫ ⎝⎛--+⎪⎪⎭⎫ ⎝⎛=+0021221211221121x x x x x x x x x x x y x ,即x y -=。
(5)对于R ∈∀μλ,和V x ∈∀,有x x x x x x x x x x x x x x x x x x x x x x x )()()]()[(21)()()2(21)()()]1()1([21)1(21)1(2121212212122212121221121212121μλμλμλμλμλμλμλμλμλμλμλλμμμλλμλμλμμμμλλλλμλ+=⎪⎪⎭⎫ ⎝⎛+=⎪⎪⎪⎭⎫⎝⎛+-++++=⎪⎪⎪⎭⎫ ⎝⎛--+++++=⎪⎪⎪⎭⎫ ⎝⎛+-+-+++=⎪⎪⎪⎭⎫⎝⎛-++⎪⎪⎪⎭⎫ ⎝⎛-+=+(6)对于R ∈∀λ和V y x ∈∀,,有⎪⎪⎪⎭⎫⎝⎛+-++++=⎪⎪⎭⎫ ⎝⎛+++=+211112211112211))(1(21)()()(y x y x y x y x y x y x y x y x λλλλλλ, ⎪⎪⎪⎭⎫ ⎝⎛+-++++=⎪⎪⎪⎭⎫ ⎝⎛-+-++-++++=⎪⎪⎪⎭⎫ ⎝⎛+-++-++=⎪⎪⎪⎭⎫⎝⎛-++⎪⎪⎪⎭⎫ ⎝⎛-+=+211112211112212211122111122122121121212121))(1(21)()()1(21)1(21)()1(21)1(21)1(21)1(21y x y x y x y x y x y y x y x y x y x y x y y x x y x y y y x x x y x λλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλ,即y x y x λλλ+=+)(。