履带车辆静液压双流驱动转向操纵机构的设计解读
履带拖拉机机械液压双功率流差速转向机构研究与设计

履带拖拉机机械液压双功率流差速转向机构研究与设计作者:莫毅松来源:《农业开发与装备》 2018年第5期摘要:通过对不同履带拖拉机机械液压双功率流差速转向系统的结构、速度特性、动力转向特性分析,提出新型机械液压双功率流差动转向系统结构-各档等半径转向机构,并以常州汉森机械有限公司生产的HM80履带拖拉机转向传动系方案为例,对它的传动设计原则和设计经验进行了总结,为履带式拖拉机的转向系统设计提供一种新的结构。
关键词:履带拖拉机;转向机构;等半径转向0 引言目前现有履带行走机构的转向机构大致分为三种结构。
1)机械式:如国产老款东方红履带拖拉机分离制动使两侧驱动轮获得不同的驱动扭矩达到转向的目的。
2)液力传动式:如履带式挖掘机、履带式装载机采用变量泵提供液压动力驱动履带,通过改变向两侧马达提供不同的流量,使两侧履带获得不同的速度实现方向上的偏转,达到转向的目的。
低速传动,传动效率低。
3)机械液压合流式:如新款洛阳东方红履带拖拉机、湖南农夫履带拖拉机、日本洋马拖拉机、以及国际上主流的新式坦克。
这种机构采用机械与液压双功率流差速转向技术。
这种技术来源于德国坦克的传动技术,1936年由欧洲一家公司研制成功SOMUA转向机,这项技术它在用不同的挡位工作时,会产生不同的转向效果。
每一个挡位都有一个规定转向半径,同时低挡实现的转向半径小,而高挡时实现的转向半径大,这与我们常规操作有些不同,即当方向盘偏转到一定的角度时转向半径是确定的。
图1 单功率流传动示意图图2 双功率流传动示意图1 新型机械液压双功率流差速转向机构研究内容对双功率流转向机构的理论及特性分析,导出特性关系式,分析行星排特性参数对传动性能的影响,为设计新型双功率流转向机构传动装置提供依据。
设计一种可以在不同的挡位工作时,会产生相同的转向效果-即转向半径仅与方向盘偏转角度有关,与其他结构参数无关的双合流转向机构,更适合一般的操作习惯。
2 结构分析这种方案中泵的传动在变速箱后(见图3),泵的排量随档位变化,设从变速箱输出端到泵的传动比为ibq基于以上的分析:图3 结构示意图图4 液压系统图速度特性:平均速度:v5L=2πrnf/(imibiz(1+k))+kEnf/(ibiqibq)(1+k)v5R=(2πrnf/ibimiz(1+k)-kEnf/(ibiqibq)(1+k)两条履带的平均速度V4PV5P=(vL+vR)/2=2πrnf/imibiz(1+k)左右履带差ΔV5ΔV5=v5L-vR=4πrnfEk/ibiqimibq(1+k)R5=B(vL+vR)/2(vL-vR)设R5为转弯半径R5=Biqibq/2kEiz动力从马达行星排传递路线没有变,因而动力特性如果忽略到马达的传递效率也一样,但比效率不能忽略,因为发动机经变速箱后转速降低了,特别是最低档在怠速工作时,传递到泵的转速非常低,会对泵的效率产生影响,这个方案需要对泵的最高转速和最低转速进行校对。
履带车辆静液压双流驱动转向操纵机构的设计
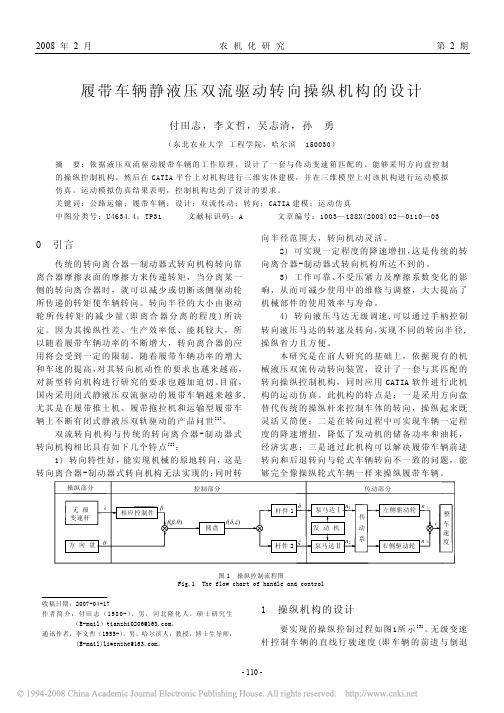
- 110 -履带车辆静液压双流驱动转向操纵机构的设计付田志,李文哲,吴志清,孙 勇(东北农业大学 工程学院,哈尔滨 150030)摘 要:依据液压双流驱动履带车辆的工作原理,设计了一套与传动变速箱匹配的、能够采用方向盘控制的操纵控制机构,然后在CATIA 平台上对机构进行三维实体建模,并在三维模型上对该机构进行运动模拟仿真。
运动模拟仿真结果表明,控制机构达到了设计的要求。
关键词:公路运输;履带车辆;设计;双流传动;转向;CATIA 建模;运动仿真中图分类号:U4634.4;TP31 文献标识码:A 文章编号:1003—188X(2008)02—0110—030 引言传统的转向离合器—制动器式转向机构转向靠离合器摩擦表面的摩擦力来传递转矩,当分离某一侧的转向离合器时,就可以减少或切断该侧驱动轮所传递的转矩使车辆转向。
转向半径的大小由驱动轮所传转矩的减少量(即离合器分离的程度)所决定。
因为其操纵性差、生产效率低、能耗较大,所以随着履带车辆功率的不断增大,转向离合器的应用将会受到一定的限制。
随着履带车辆功率的增大和车速的提高,对其转向机动性的要求也越来越高,对新型转向机构进行研究的要求也越加迫切。
目前,国内采用闭式静液压双流驱动的履带车辆越来越多,尤其是在履带推土机、履带拖拉机和运输型履带车辆上不断有闭式静液压双轨驱动的产品问世[1]。
双流转向机构与传统的转向离合器-制动器式转向机构相比具有如下几个特点[2]:1) 转向特性好,能实现机械的原地转向,这是转向离合器-制动器式转向机构无法实现的;同时转向半径范围大,转向机动灵活。
2) 可实现一定程度的降速增扭,这是传统的转向离合器-制动器式转向机构所达不到的。
3) 工作可靠、不受压紧力及摩擦系数变化的影 响,从而可减少使用中的维修与调整,大大提高了机械部件的使用效率与寿命。
4) 转向液压马达无级调速,可以通过手柄控制转向液压马达的转速及转向,实现不同的转向半径,操纵省力且方便。
橡胶履带车辆液压机械差速转向装置设计——操纵系统设计___设计说明书.

前言的挑战,开发性能完善质量可靠,适用,价格合理的履带拖拉机迫在眉睫。
为了满足这种需求,机械液压双功率流转向机构被应用在了履带拖拉机上。
双功率流转向机构把从发动机传来的动力,分两路传给每一侧驱动轮的,其优点是动力可按比例分配到两侧履带上,转向时两侧履带始终传递动力,可实现动力转向,转向时平均车速不降低,动力不中断,因此对农田土壤破坏小,特别在松软的农田作业时,整机通过性好,作业效率高,左右两侧履带的速度差可以无级控制,这一点,是履带推土机可以高效高精度的进行侧面切削和整形作业。
可实现原地转向,提高了履带拖拉机的机动性。
在坡地工作转向时,不会出现“逆转向”现象,提高了履带拖拉机工作安全性。
与齿轮传动的转向机构相比,传动系简单,可避免因采用高、低、双速传动装置造成的动力转向能力受限的弊端。
履带车辆双功率流转向技术的发展是随着液压和液力传动技术的发展而逐渐产生发展起来的。
因为履带车辆在进行小半径转向的时候,特别是在某些极限转向的时候,转向系统传递的功率是很大的。
液压元件成本适合、性能可靠,体积不大,可作为结构元件用。
并且实现了履带车辆转向的方向盘操纵,可对大功率农用拖拉机的需求。
第一章转向技术的发展及趋势§1.1 转向技术的发展过程及优缺点转向机构对于任何车辆来说都是重要的组成部分。
对履带车辆来说,转向机构性能的好坏更为重要,其可以直接影响到履带车辆的使用性能。
自1904年霍尔顿履带式拖拉机发明以来,特别是坦克作为一种新式武器在第一次世界大战中出现并取得巨大成功后,履带车辆的转向技术就一直处于不断地发展和进步之中。
从传统的转向机构到双功率流转向机构,从独立式到差速式,各种新型的转向机构层出不穷从原理上进行分类,可以把履带车辆从出现到目前为止使用过的转向机构表示出来。
一、转向离合器式转向机构转向离合器式转向机构在拖拉机转向时,靠分离某一侧转向离合器,减小或功率限制,驾驶员若持续转向,稍有不慎就会使发动机熄火,因而只能靠滑磨,用较大半径转向,或极不平稳地以小半径断续转向。
履带拖拉机液压驱动系统的设计

履带拖拉机液压驱动系统的设计一、引言二、液压驱动系统的组成1.液压泵:液压泵是整个液压驱动系统的核心部件,用于提供动力。
液压泵的选型应考虑到拖拉机的功率需求以及液压系统所能承受的最大压力。
2.液压马达:液压马达是将液压能转化为机械能的装置。
在履带拖拉机中,液压马达驱动履带机构,使拖拉机能够行驶。
3.液压阀:液压阀用于控制液压系统的流量、压力和方向。
根据履带拖拉机的实际需求,可以选择适合的液压阀来实现系统的控制。
4.油箱:油箱主要用于储存液压油,并通过油液冷却系统保持液压油的温度和粘度。
油箱的设计需要考虑容量大小、冷却系统和滤清器等。
5.油液冷却系统:油液冷却系统用于控制液压油的温度,防止油液过热,从而保护液压系统的正常工作。
三、液压驱动系统的设计要点1.功率匹配:液压泵的功率输出应满足液压马达的功率需求,以确保系统能够正常工作。
同时,还需要考虑到将来可能增加的工作负荷,留有一定的余量。
2.系统压力控制:液压系统的压力应在设计范围内工作,以保证系统的可靠性和安全性。
可以通过调整液压泵的排量或者增加压力阀来实现。
3.系统控制:液压阀的选择和控制方式的设计应根据拖拉机的功能需求来确定,以实现精确的液压控制。
4.液压油滤清系统:液压油滤清器的设计要考虑到滤清效果和维护方便性,以确保系统的油液清洁度。
5.油液冷却系统:油液冷却系统的设计应满足拖拉机的工作环境要求,确保液压油在工作过程中能够保持合适的温度。
四、设计案例假设我们需要设计一个60马力的履带拖拉机的液压驱动系统。
1.液压泵:根据拖拉机的功率要求,选择一个合适的液压泵,如80升/分钟。
2.液压马达:根据液压泵的输出和系统需求,选择一个合适的液压马达,如50升/分钟。
3.液压阀:选择适合的液压阀,如控制行驶方向的比例溢流阀和控制工作装置的多路阀。
4.油箱和油液冷却系统:根据拖拉机的工作环境和工作时间,设计一个合适容量的油箱,并安装油液冷却器,确保液压油的温度控制在安全范围内。
履带车辆的转向理论
履带车辆的转向理论一、双履带车辆的转向理论对于双履带式车辆各种转向机构就基本原理来说是相同的,都是依靠改变两侧驱动轮上的驱动力,使其达到不同时速来实现转向的。
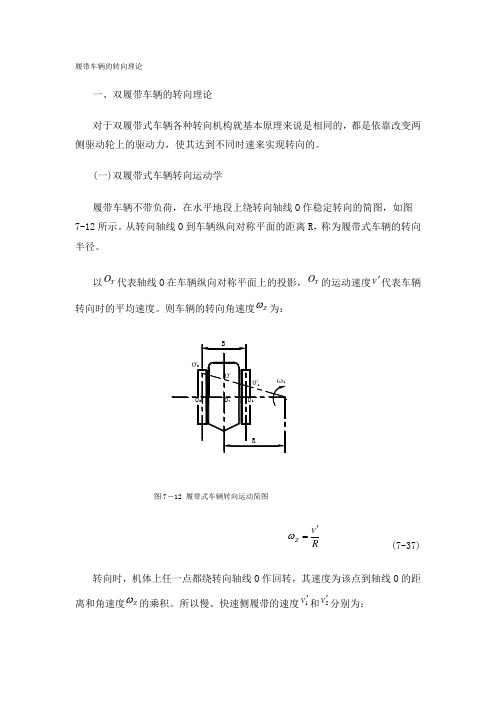
(一)双履带式车辆转向运动学履带车辆不带负荷,在水平地段上绕转向轴线O 作稳定转向的简图,如图7-12所示。
从转向轴线O 到车辆纵向对称平面的距离R ,称为履带式车辆的转向半径。
以T O 代表轴线O 在车辆纵向对称平面上的投影,T O 的运动速度v '代表车辆转向时的平均速度。
则车辆的转向角速度Z ω为:图7-12 履带式车辆转向运动简图R v Z '=ω (7-37)转向时,机体上任一点都绕转向轴线O 作回转,其速度为该点到轴线O 的距离和角速度Z ω的乘积。
所以慢、快速侧履带的速度1v '和2v '分别为:Z Z Z Z B v B R v B v B R v ωωωω5.0)5.0(5.0)5.0(21+'=+='-'=-=' (7-38)式中:B —履带车辆的轨距。
根据相对运动原理,可以将机体上任一点的运动分解成两种运动的合成:(1)牵连运动,;(2)相对运动。
由上可得:B R B R v v 5.05.021+-=''(二)双履带式车辆转向动力学 1、牵引平衡和力矩平衡图7-13给出了带有牵引负荷的履带式车辆,在水平地段上以转向半径R 作低速稳定转向时的受力情况(离心力可略去不计)。
转向行驶时的牵引平衡可作两点假设:(1) 在相同地面条件下,转向行驶阻力等于直线行驶阻 力,且两侧履带行驶阻力相等,即:ff f F F F 5.021='='(2)在相同的地面条件和负荷情况下,γcos x F 相当于直 线行驶的有效牵引力KP F ,即:图7-13 转向时作用在履带车辆上的外力γcos x KP F F =所以回转行驶的牵引平衡关系为:K KP f K Kx f f K KF F F F F F F F F F =+='+'+'+'='+'212121cos γ (7-39)设履带车辆回转行驶时,地面对车辆作用的阻力矩为μM ,在负荷xF 作用下总的转向阻力矩为:γμsin x T C F a M M += (7-40)式中:T a —牵引点到轴线21O O 的水平距离。
履带车辆双功率流转向装置的液压系统及操纵系统设计

履带车辆双功率流转向装置的液压系统及操纵系统设计摘要机械液压双功率流转向系统是履带车辆的一种新型转向方式,也就是发动机功率在变速箱的输入轴上分流,一路功率流向变速箱,一路功率流向由变量泵、定量马达及其他控制元件组成的液压转向调速系统。
此种转向机构具有转向时平均速度不降低,转向工作效率高,左右履带的速度差能够无级调节,可实现由方向盘操纵进行精确的方向控制,机动性好等许多优点。
有效的改善了履带车辆的转向性能。
此系统设计的关键就是实现双功率流履带车辆的平稳转向。
故本文在参考东方红1302R橡胶履带拖拉机的一些参数的情况下,着重介绍了机械液压双功率流转向系统的液压系统及转向操纵系统的设计方案和工作原理,对液压系统中液压元件,如变量泵、定量马达等进行了设计计算,并合理的选取了系统中所需的液压元件,并使各元件间匹配合理,使其达到最佳的工作状态。
同时对设计的液压系统和操纵系统进行了转向性能的初步计算,其结果表明此种设计方案参数匹配合理,能较好的满足履带车辆的转向要求。
关键词:履带车辆,双功率流,液压系统,操纵系统,转向机构DESIGNING STEERING CONTROL HYDRAULICSYSTEM OF DOUBLE POWER FLOW TRACKEDVEHICLEABSTRACTMech-hydraulic double power flow steering is a new technique for tracked vehicle's turning systems, This is engine power is broken down in the gearbox input shaft.A part of power flows to gearbox, the other part of power flows to variable pumps, motors and other control components of hydraulic steering regulate speed system . Such turning mechanical have the average speed is not reduced and high efficiency when vehicle.Tracked about the speed difference can be no class regulation, by the steering wheel can be manipulated to achieve accurate direction control, good mobility and many other advantages. An improvement of the tracked vehicle to the performance. The system design is the key to achieving double-tracked vehicle power flow in a smooth shift. It is in reference to the DongFangHong-1302 R rubber tracked tractor some of the parameters of the circumstances, focus on the mechanical-hydraulic power transfer to the system of hydraulic systems and steering control system design and the working principle, for hydraulic components of hydraulic system, such as variable pump, quantitative motors for the design, and the selection of a reasonable system of hydraulic components, to make a reasonable match between components. to enable it to achieve the best working conditions. Meanwhile in the design of hydraulic systems and manipulation of the system performance to the preliminary calculation, The results show that such a design parameter matching reasonable and can better meet the tracked vehicle to the requirements.KEY WORD:Tracked vehicle, Double power flow, Hydraulic system, Operating system, turning mechanism目录第一章前言 (1)第二章液压系统的设计要求 (2)第三章液压系统的负载分析 (3)第四章液压系统的方案分析 (5)§4.1 操纵系统的设计分析 (5)§4.2 液压系统的设计方向 (5)§4.3 总体方案的分析 (6)第五章液压元件的设计计算与选取 (8)§5.1 液压马达的参数设计与选取 (8)§5.1.1 液压马达最大转向阻力矩的计算 (8)§5.1.2 液压马达最大每转排量 (9)§5.1.3 液压马达的最大转速 (9)§5.2液压变量泵的参数计算............................. .9 §5.3 液压系统补油流量的计算 (10)§5.4 过滤器的选择............................. . (12)§5.5系统发热温升的计算及冷却器的选取 (13)§5.5.1系统发热温升的计算 (13)§5.5.2 系统散热量的计算 (14)§5.5.3散热器的选取.................. (15)§5.6 油箱的设计计算............................. (15)§5.6.1 液压系统所需油箱容量的计算 (15)§5.7 液压系统油管及油管接头的选取 (15)§5.8 液压系统中液压阀的选取 (16)§5.9 液压油的选用............................. . (16)§5.10 转向操纵系统的选择 (17)§5.10.1 转向器的选取............................. ..17 §5.10.2 转向柱的选取............................. ..17 §5.10.3 方向盘的选用............................ (18)第六章液压系统性能的分析 (19)第七章结论............... .. (20)参考文献............................ .. (21)致谢........................... (22)。
橡胶履带车辆液压机械差速转向装置设计――操纵系统设计开解读
河南科技大学毕业设计(论文)开题报告(学生填表)学院:车辆与动力工程学院 2011年 04 月01 日课题名称橡胶履带车辆液压机械差速转向装置设计——操纵系统设计学生姓名程乐友专业班级车辆074班课题类型工程设计指导教师曹付义职称讲师课题来源科研1. 设计(或研究)的依据与意义液压机械差速转向装置是履带车辆的一种新型转向装置,本设计以1302R农业橡胶履带车辆为装机对象,根据双功率流转向机构的特点,提出其转向操纵系统的组成原理及设计方案,给出了主要液压元件的选取原则并对主要液压元件进行选择,在此基础上,对其转向性能进行了初步计算和分析。
已知条件如下:1 发动机型号为LR6105ZT8,额定功率为95.6kW,额定转速为2300r/min;2 变速器、中央传动、最终传动及行走系统参数参照东方红1302R农用橡胶履带车辆的结构参数,可通过参考文献获取;3 泵、马达选用萨奥公司的90系列55型变量泵和定量马达,泵、马达的参数可通过参考文献获取;4 东方红1302R农用橡胶履带车辆设计车速范围为3-15km/h,最大转向阻力距为49760Nm。
此转向操纵机构一般由变量泵、控制阀、定量马达、伺服阀控制机构组成。
其动力,一路由变速箱流向转向差动机构,一路由变量泵、定量马达流向转向差动系。
其中液压泵和液压马达可以无级调速,因此使用这种机构既可获得车辆两侧的速度差实现无级控制。
故车辆两侧履带驱动轮转速差可以有无穷多个,可得到无穷多个转向半径,即可实现无级转向,且实现了方向控制的方向盘操纵。
2. 国内外同类设计(或同类研究)的概况综述履带式牵引车辆的传动系统最早的行驶同轮式车辆一样,都是单功率流的。
1936年法国生产了一种SOMUA转向机,这是最早的一种双功率流转向装置。
它利用两个差速器和两个离合器组成的中央差速双功率流传动系。
20世纪30~40年代,英国和德国逐渐发展了现代形式的双功率传动系。
它们相当于把SOMUA传动位于中央的两个差速器,都分成左右两半来分别加以组合,即用左右汇流行星排来代替,结构比较简单合理,形成现代把变速和转向机构综合在一起的综合传动基础,成为至今的典型。
履带牵引车辆转向机构的设计

摘要为了适应现代化生产的需要,履带拖拉机不断提高了行驶速度。
为了增强履带拖拉机的机动性能,要求其能够进行任意半径转向。
为了避免拖拉机履带对路面的滑磨,又要求两条履带能够实现差速。
这就需要有一种机构来实现拖拉机的这些使用要求。
此时,机械液压双功率流差速式转向机构的优点就体现出来了。
这种转向机构在保证连续无级输出转速的前提下应用较小的液压元件功率大幅度提高车辆输出的总功率,并且其传动效率远远超过纯液压转向机构的传动效率。
对此,基于双功率流传动原理,利用液压元件的无极调速特性,对适合履带车辆的液压机械双功率流差速转向机构的转向原理进行了分析。
并且从履带拖拉机机械液压双功率差速式转向机构的转向特点入手,分析了三种有代表性的液压机械双功率差速式转向机构的转向性能和转向指标。
最后,选择了一拖公司设计的行星排机构进行设计计算,提出了转向机构行星排特性参数的确定原则,并结合东方红1302R型橡胶履带拖拉机进行了参数设计和转向运动性能分析,所选参数满足整机性能的要求。
关键词:拖拉机机械液压双功率流差速转向机构设计AbstractProduction in order to meet the needs of modernization, crawler tractors continuously improve the speed. To enhance tractor mechanical functions required to carry out arbitrary radius steering. To avoid crawler tractor on the road friction and also requires two tracks to achieve differential. This need for a body to achieve these tractor use requirements. At this time, the mechanical-hydraulic power flow Differential Steering institutions on the merits of the reflected. This shift in the level of continuous output speed without the prerequisite of the application of smaller hydraulic components significantly improve power transmission The total power, and its transmission efficiency far exceed net hydraulic steering mechanism of transmission efficiency. In this regard, based on the popular action-power principle, the use of hydraulic components of limitless speed characteristics, Tracked vehicles suitable for the mechanical-hydraulic differential power flow shifted to the principle of analysis. Tractor and machinery from the two hydraulic power differential steering the steering characteristics, Analysis of three representative mechanical-hydraulic power-shift differential to the performance indicators and steering. Finally, the choice of a trailer company in the planetary bodies arrangements for the design, made arrangements to planetary bodies characteristic parameters of the principles, and the combination of the East-1302 R-rubber track tractor parameters for the design and performance analysis to campaign, Whole selected parameters to meet performance requirements.Keywords : tractor-mechanical hydraulic power flow differential steering mechanism design目录第一章绪论........... ...... .. (1)第二章方案分析 (4)§2.1转向性能........... ...... ............... (4)§2.2评价指标........... ...... ............... (4)§2.3卡特.小松.一拖公司三种产品方案的比较........ ..5第三章设计计算 (7)§3.1行星齿轮的设计计算. .... (7)§3.1.1选取行星齿轮传动的传动类型和传动简图 (7)§3.1.2进行行星齿轮传动的配齿计算......... ...... (7)§3.1.3初步计算齿轮的主要参数........ .. ........ . (8)§3.1.4几何尺寸计算... .... ... ... .... ... ... .... .9§3.1.5行星齿轮传动装配条件的验算. ... ... .... .. . .. .11§3.1.6计算行星齿轮传动的效率 ... ... .. ... . ... .11 §3.2 最终传动部分的设计计算.. (12)§3.2.1最终传动比齿轮的设计计算.............. (12)§3.2.2最终传动比齿轮的尺寸计算............... (13)§3.2.3最终传动齿轮上短支撑轴的设计计算 (14)§3.3 液压马达部分的设计计算......... . (14)§3.3.1液压马达输出端齿轮的设计计算 (14)§3.3.2液压马达输出端齿轮的尺寸计算......... (15)第四章校核计算.. .. ... ... .. .. ... ... .. .. ... (17)§4.1 行星齿轮传动的校核计算... ... .. ... .. .. ... (17)§4.2 最终传动部分的校核计算... ... .. ... .. .. ... (19)参考文献 (21)致谢 (22)第一章绪论履带作为车辆的行走机构既加强了车辆离开道路的越野能力,也增大了车辆的负重能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
履带车辆静液压双流驱动转向操纵机构的设计解读
首先,履带车辆静液压双流驱动转向操纵机构由液压系统和转向操纵系统两部分组成。
液压系统主要包括主油泵、马达、马达锁定装置、主控制阀等元件,用来产生所需的液压驱动力。
转向操纵系统主要包括转向操纵机构、操纵阀等元件,用来实现对转向操纵机构的控制。
在这种机构中,通过操纵阀控制液压系统中的流量分配,从而驱动不同的油缸。
操纵阀通常采用手动或电动方式进行控制。
当操纵阀的控制杆移动时,会改变液压系统中的流量分配,从而驱动液缸进行转向。
转向操纵机构由转向齿轮、扭转弹簧和驱动轮等组成。
其中,转向齿轮通过驱动轮与履带车辆的履带进行连接,从而实现转向操纵。
扭转弹簧的作用是提供转向齿轮的回正力,保证转向时的稳定性和准确性。
在进行转向时,通过控制操纵阀的位置和操纵杆的移动来改变液压系统中的流量分配。
当液压系统中的流量分配改变时,液压缸会受到液压驱动力的作用,从而改变转向齿轮的位置。
同时,扭转弹簧会提供回正力,使得转向齿轮回到中性位置。
总的来说,履带车辆静液压双流驱动转向操纵机构采用静液压驱动方式,通过控制液压系统中的流量来实现车辆的转向。
它具有结构简单、回正力强和转向灵活等优点。
在实际应用中,还可以根据具体需求进行优化和改进。