6.3 PWM跟踪控制技术
PWM控制技术

PWM控制技术1.试说明 PWM 控制的基本原理。
答:PWM 控制就是对脉冲的宽度进行调制的技术。
即通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
在采样控制理论中有一条重要的结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同,冲量即窄脉冲的面积。
效果基本相同是指环节的输出响应波形基本相同。
上述原理称为面积等效原理以正弦 PWM 控制为例。
把正弦半波分成N 等份,就可把其看成是N 个彼此相连的脉冲列所组成的波形。
这些脉冲宽度相等,都等于π/N,但幅值不等且脉冲顶部不是水平直线而是曲线,各脉冲幅值按正弦规律变化。
如果把上述脉冲列利用相同数量的等幅而不等宽的矩形脉冲代替,使矩形脉冲的中点和相应正弦波部分的中点重合,且使矩形脉冲和相应的正弦波部分面积(冲量)相等,就得到 PWM 波形。
各 PWM 脉冲的幅值相等而宽度是按正弦规律变化的。
根据面积等效原理,PWM 波形和正弦半波是等效的。
对于正弦波的负半周,也可以用同样的方法得到 PWM 波形。
可见,所得到的 PWM 波形和期望得到的正弦波等效2. 单极性和双极性 PWM 调制有什么区别?三相桥式 PWM 型逆变电路中,输出相电压(输出端相对于直流电源中点的电压)和线电压 SPWM 波形各有几种电平?答:三角波载波在信号波正半周期或负半周期里只有单一的极性,所得的 PWM 波形在半个周期中也只在单极性范围内变化,称为单极性 PWM 控制方式。
三角波载波始终是有正有负为双极性的,所得的 PWM 波形在半个周期中有正、有负,则称之为双极性 PWM 控制方式。
三相桥式 PWM 型逆变电路中,输出相电压有两种电平:0.5U d和-0.5 U d。
输出线电压有三种电平U d、0、- U d。
3.特定谐波消去法的基本原理是什么?设半个信号波周期内有 10 个开关时刻(不含0 和p 时刻)可以控制,可以消去的谐波有几种?答:首先尽量使波形具有对称性,为消去偶次谐波,应使波形正负两个半周期对称,为消去谐波中的余弦项,使波形在正半周期前后 1/4 周期以p /2 为轴线对称。
四种pwm控制技术的原理
四种pwm控制技术的原理
PWM(Pulse Width Modulation,脉宽调制)是一种常用的数字控制技术,用于实现模拟信号的精确控制。
它通过改变信号的脉冲宽度来控制信号的平均电压或电流。
下面是四种常见的PWM控制技术及其原理:
1. 占空比控制:占空比是PWM信号高电平与周期之比。
通过改变占空比可以控制输出信号的平均电压或电流。
占空比越大,输出信号的平均电压或电流越大;占空比越小,输出信号的平均电压或电流越小。
这种方法简单易行,适用于许多应用场合。
2. 脉冲数改变:这种方法通过改变PWM信号每个周期中的脉冲数来控制输出信号的平均电压或电流。
脉冲数越多,输出信号的平均电压或电流越大;脉冲数越少,输出信号的平均电压或电流越小。
脉冲数改变时,周期保持不变。
这种方法常用于需要精确控制输出信号的平均电压或电流的应用。
3. 频率调制:这种方法通过改变PWM信号的频率来控制输出信号的平均电压或电流。
频率越高,输出信号的平均电压或电流越大;频率越低,输出信号的平均电压或电流越小。
输出的平均功率受频率的影响最小,可以实现高效的能量转换。
频率调制一般使用较高的固定占空比。
4. 相位移控制:这种方法通过改变PWM信号相位来控制输出信号的平均电压或电流。
相位移正比于输出信号的平均电压或电流。
相位移控制可以实现交流电源的电压或电流控制,广泛应用于电网有功功率控制和无功功率控制。
这四种PWM控制技术可以根据具体应用的需要选择合适的方式,以实现对输出信号的精确控制。
PWM控制原理(精编文档).doc
【最新整理,下载后即可编辑】PWM控制技术主要内容:PWM控制的基本原理、控制方式与PWM波形的生成方法,PWM逆变电路的谐波分析,PWM整流电路。
重点:PWM控制的基本原理、控制方式与PWM波形的生成方法。
难点:PWM波形的生成方法,PWM逆变电路的谐波分析。
基本要求:掌握PWM控制的基本原理、控制方式与PWM波形的生成方法,了解PWM逆变电路的谐波分析,了解跟踪型PWM逆变电路,了解PWM整流电路。
PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
第3、4章已涉及这方面内容:第3章:直流斩波电路采用,第4章有两处:4.1节斩控式交流调压电路,4.4节矩阵式变频电路。
本章内容PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,PWM控制技术正是有赖于在逆变电路中的应用,才确定了它在电力电子技术中的重要地位。
本章主要以逆变电路为控制对象来介绍PWM控制技术,也介绍PWM 整流电路1 PWM控制的基本原理理论基础:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同,是指环节的输出响应波形基本相同。
低频段非常接近,仅在高频段略有差异。
图6-1 形状不同而冲量相同的各种窄脉冲面积等效原理:分别将如图6-1所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如图6-2a所示。
其输出电流i(t)对不同窄脉冲时的响应波形如图6-2b所示。
从波形可以看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则几乎完全相同。
脉冲越窄,各i(t)响应波形的差异也越小。
如果周期性地施加上述脉冲,则响应i(t)也是周期性的。
用傅里叶级数分解后将可看出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。
图6-2 冲量相同的各种窄脉冲的响应波形用一系列等幅不等宽的脉冲来代替一个正弦半波,正弦半波N等分,看成N个相连的脉冲序列,宽度相等,但幅值不等;用矩形脉冲代替,等幅,不等宽,中点重合,面积(冲量)相等,宽度按正弦规律变化。
6.3变压变频调速系统中的脉宽调制(PWM)技术.
6.3 变压变频调速系统中的脉宽调制(PWM)技术本节提要正弦波脉宽调制(SPWM)技术电流滞环跟踪PWM(CHBPWM)控制技术控制技术(或称磁链跟踪控制技术)电压空间矢量PWM(SVPWM)PWM技术就是利用半导体器件的开通和关断把直流电压变成一定形状的电压脉冲序列,以实现变频、变压并有效控制和消除谐波的一门技术。
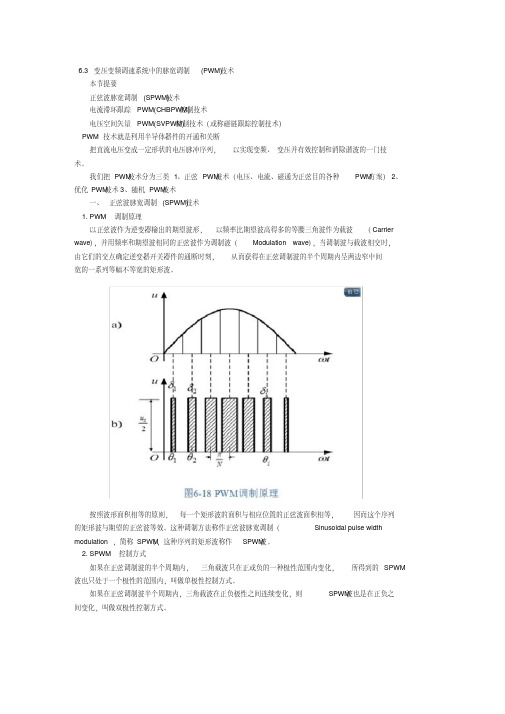
我们把PWM技术分为三类1、正弦PWM技术(电压、电流、磁通为正弦目的各种PWM方案)2、优化PWM技术3、随机PWM技术一、正弦波脉宽调制(SPWM)技术1. PWM调制原理以正弦波作为逆变器输出的期望波形,以频率比期望波高得多的等腰三角波作为载波(Carrier wave),并用频率和期望波相同的正弦波作为调制波(Modulation wave),当调制波与载波相交时,由它们的交点确定逆变器开关器件的通断时刻,从而获得在正弦调制波的半个周期内呈两边窄中间宽的一系列等幅不等宽的矩形波。
按照波形面积相等的原则,每一个矩形波的面积与相应位置的正弦波面积相等,因而这个序列的矩形波与期望的正弦波等效。
这种调制方法称作正弦波脉宽调制(Sinusoidal pulse width modulation,简称SPWM),这种序列的矩形波称作SPWM波。
2. SPWM控制方式如果在正弦调制波的半个周期内,三角载波只在正或负的一种极性范围内变化,所得到的SPWM 波也只处于一个极性的范围内,叫做单极性控制方式。
如果在正弦调制波半个周期内,三角载波在正负极性之间连续变化,则SPWM波也是在正负之间变化,叫做双极性控制方式。
规则采样法原理三角波两个正峰值之间为一个采样周期Tc自然采样法中,脉冲中点不和三角波一周期的中点(即负峰点)重合规则采样法使两者重合,每个脉冲的中点都以相应的三角波中点为对称,使计算大为简化在三角波的负峰时刻tD对正弦信号波采样得D点,过 D作水平直线和三角波分别交于A、B 点,在A点时刻 tA和B点时刻 tB控制开关器件的通断脉冲宽度 d 和用自然采样法得到的脉冲宽度非常接近根据上述采样原理和计算公式,可以用计算机实时控制产生SPWM波形。
第6章PWM技术

由电机学,三相对称正 弦供电时: 总向量恒幅恒速旋转 (电)角速度:w 2f s 代表空间正弦分布且圆 转磁场,u s、es、is 是引用量
26
• 三相交流的空间向量
n=0:15;x=2*pi*n/16;a=2*pi/3;
v=cos(x)+cos(x+a)*exp(j*a) +cos(x-a)*exp(-j*a); plot(v)
16
除计算法和调制法外,还有 空间向量法 跟踪控制方法
17
6.2.2 异步调制和同步调制
载波比N = fc / fo----模拟uo一个周波的脉冲数 1) 异步调制----fc不变, N随fo变 载波与调制波不同步 N常≠整数 对称性差。 当fo较低时,N大------低频性能好。
当fo增高时,N小------高频差
u
ω1
u2Tc
32
空间矢量磁链控制 SVPWM
其它区域也有相应控制规则
SVPWM用电压向量u控制Ψ 沿折线围线,并走走停停逼近圆 开关频率越高,线元usTc越短 Ψ圆越准
33
空间矢量磁链控制 SVPWM
三电平逆变器 电压向量us更多 按ΔΨ=Ψ* - Ψ --用最佳us控制 Ψ圆更准
34
SVPWM波形特点
31
空间矢量磁链控制 SVPWM
--仿闭环控制算法 控制方程ΔΨs “=” usTc 按Ψ转向超前90度建u参考轴 u2 用u轴前后电压向量控制Ψ 例如图 矢量 作用 应用条件 u1 u1 正转增幅 Ψ滞后欠幅 u2 正转减幅 滞后超幅 u7,8 停转等待 超前 Ψ 例:Ψ滞后欠幅,用u1 u1Tc Ψ滞后超幅,用u2 Ψ超前,用u7,8 注”相邻原则”:u1u8; u2u7;可减少开关动作
PWM控制技术

┊
控制方法即可使电压与频率协调变化.相对于 PAM 法,该方法的优点是简化了电
┊
路结构,提高了输入端的功率因数,但同时也存在输出电压中除基波外,还包含
┊
┊
较大的谐波分量。
┊
(2)随机 PWM
┊
在上世纪 70 年代开始至上世纪 80 年代初,由于当时大功率晶体管主要为双
极性达林顿三极管,载波频率一般不超过 5kHz,电机绕组的电磁噪音及谐波造成
┊
Amplitude Modulation)控制技术来实现的,其逆变器部分只能输出频率可调的
┊
方波电压而不能调压.等脉宽 PWM 法正是为了克服 PAM 法的这个缺点发展而来的,
┊
是 PWM 法中最为简单的一种.它是把每一脉冲的宽度均相等的脉冲列作为 PWM 波,
┊
┊
通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当
┊
电流波形,降低电源系统谐波的多重 PWM 技术在大功率变频器中有其独特的优
┊
势(如 ABB ACS1000 系列和美国 ROBICON 公司的完美无谐波系列等);而优化 PWM
┊
┊
所追求的则是实现电流谐波畸变率(THD)最小,电压利用率最高,效率最优,
┊
及转矩脉动最小以及其它特定优化目标。
┊
在 70 年代开始至 80 年代初,由于当时大功率晶体管主要为双极性达林顿
┊
┊
内的面积相等,通过改变调制波的频率和幅值则可调节逆变电路输出电压的频
┊
率和幅值.该方法的实现有以下几种方案。
┊
(4)等面积法
┊
┊
该方案实际上就是 SPWM 法原理的直接阐释,用同样数量的等幅不等宽的矩形脉
简述pwm控制技术原理

简述pwm控制技术原理
脉宽调制(PWM)是一种常用的电子控制技术,通过调节信号的占空比来控制输出信号的平均功率。
PWM控制技术常用于电力电子、自动控制、通信等领域。
PWM控制技术的原理如下:
1. 基本原理:PWM控制技术基于周期性的高电平(ON)和低电平(OFF)信号。
在一个固定的时间周期内,通过改变高电平和低电平信号的持续时间比例(即占空比),可以实现对输出信号的平均功率的调节。
2. 信号生成:PWM控制技术需要产生一个周期性的方波信号作为控制信号。
可以使用定时器或计数器来生成这个周期性的信号,根据设定的频率来确定每个周期的时间长度。
3. 调节占空比:在每个周期内,通过改变高电平信号的持续时间来调节占空比。
占空比定义为高电平信号的持续时间与一个周期的总时间之比。
例如,一个占空比为50%的PWM信号表示高电平和低电平信号的时间相等。
4. 输出控制:PWM信号经过一个滤波器,将高频的方波信号转换为模拟信号。
根据PWM 信号的占空比,滤波器输出的模拟信号的平均值相应地调节。
通过控制占空比,可以实现对输出信号的电压、电流或功率进行精确的控制。
PWM控制技术的优点包括高效性、精确性和可靠性。
由于输出信号是由开关器件的开关状态决定的,因此可以快速响应和调节输出信号。
PWM技术广泛应用于电机控制、LED调光、电源变换器等领域,以实现精确的控制和节能的效果。
电力电子第6章 脉宽调(PWM)技术

O
u UN'
Ud
2
O
?
Ud 2
u VN'
Ud
2O
?
Ud 2
u WN'
Ud
2
O
u UV Ud
O -Ud u UN
O
?t ?t ?t ?t
?t
2Ud
Ud
3
3
?t
图6-8 三相桥式PWM逆变电路波形
死区时间的长短主要由开关器 件的关断时间决定。
工作时V1和V2通断互补, V3和V4通断也互补。
以uo正半周为例,V1通, V2断,V3和V4交替通断。
负载电流比电压滞后,在 电压正半周,电流有一段 区间为正,一段区间为负。
负载电流为正的区间,V1 和V4导通时,uo等于Ud 。
图6-4 单相桥式PWM逆变电路
6-14
6.2.1 计算法和调制法
图6-4 单相桥式PWM逆变电路
6-15
6.2.1 计算法和调制法
3)单极性PWM控制方式(单相桥逆变)
在ur和uc的交点时刻控制IGBT的通断。
ur正半周,V1保持通,
V2保持断。
u
uc ur
当 ur>uc 时 使 V4 通 ,
V3断,uo=Ud 。
O
wt
当 ur<uc 时 使 V4 断 ,
V3通,uo=0 。
uo
uof uo
Ud
O
wt
-Ud
图6-6 双极性PWM控制方式波形
6-17
u
uc
ur6.2.1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ud 2 Ud 2
滤波器
+ u* u
u
图 6-26
图6-26 电 压跟踪控制电路举例
u * =0 时 , 输 出 u 为 频 率 较 高 的 矩 形 波 , 相 当 于 一 个 自 励 振 荡 电 路 u*为 直 流 时 , u 产 生 直 流 偏 移 , 变 为 正 负 脉 冲 宽 度 不 等 , 正 宽 负 窄 或 正 窄 负 宽 的 矩 形 波 u*为 交 流 信 号 时 , 只 要 其 频 率 远 低 于 上 述 自 励 振 荡 频 率 , 从 u 中 滤 除 由 器 件 通 断 产 生 的 高 次 谐 波 后 , 所 得 的 波 形 就 几 乎 和 u* 相 同 , 从 而 实 现 电 压 跟 踪 控 制
6.3.1
滞环比较方式
电流跟踪控制应用最多
基本原理
把 指 令 电 流 i*和 实 际 输 出 电 流 i 的 偏 差 i*-i 作 为 滞 环 比 较 器 的 输 入 比 较 器 输 出 控 制 器 件 V1 和 V2 的 通 断 V 1 ( 或 VD 1 ) 通 时 , i 增 大 V 2 ( 或 VD 2 ) 通 时 , i 减 小 通 过 环 宽 为 2 I 的 滞 环 比 较 器 的 控 制 , i 就 在 i * + I 和 i * - I 的 范 围 内 ,呈 锯 齿 状 地 跟 踪 指 令 电 流
uAB O t
i O
i*U
iU t 图6-25
图 6-25
三 相 电 流 跟 踪 型 PWM 逆 变 电 路 输 出 波 形
采 用 滞 环 比 较 方 式 的 电 流 跟 踪 型 PWM 变 流 电 路 有 如 下 特 点
( 1) 硬 件 电 路 简 单 ( 2) 实 时 控 制 , 电 流 响 应 快 ( 3) 不 用 载 波 , 输 出 电 压 波 形 中 不 含 特 定 频 率 的 谐 波 ( 4) 和 计 算 法 及 调 制 法 相 比 , 相 同 开 关 频 率 时 输 出 电 流 中 高 次 谐 波 含 量 多 ( 5 ) 闭 环 控 制 , 是 各 种 跟 踪 型 PWM 变 流 电 路 的 共 同 特 点
滞环比较方式电流跟踪控制举例
i
i
i*
i* +I
O i* -I
t
图 6-23
滞 环 比 较 图6-23 方式的指令电流和输出电流
三相的情况
U
V
W
Ud
V1 V4
V3 V6
V5 V2
- iU + i* U
- iV + i*V 图6-24
- iW + i* W
图 6-24
三 相 电 流 跟 踪 型 PWM 逆 变 电 路
定时比较方式
不用滞环比较器,而是设置一个固定的时钟 以固定采样周期对指令信号和被控量采样,按偏差的极性来控制开关器件通断 在 时 钟 信 号 到 来 时 刻 , 如 i < i*, 令 V1 通 , V2 断 , 使 i 增 大 如 i > i*, 令 V1 断 , V2 通 , 使 i 减 小 每个采样时刻的控制作用都使实际电流与指令电流的误差减小 采 用 定 时 比 较 方 式 时 , 器 件 最 高 开 关 频 率 为 时 钟 频 率 的 1/2 和滞环比较方式相比,电流误差没有一定的环宽,控制的精度低一些
Ud
负 载
C+ C+ C+ -
A A A
- iU + - iV +
i*U i*V
- iW * i + W
三相三角波 发生电路 图6-27 三角波比较方式电流跟踪型逆变电路
图 6-27
特点
开关频率固定,等于载波频率,高频滤波器设计方便 为改善输出电压波形,三角波载波常用三相 和滞环比较控制方式相比,这种控制方式输出电流谐波少
6.3
PWM 跟 踪 控制 技 术
PWM 波 形 生 成 的 第 三 种 方 法 — — 跟 踪 控 制 方 法 把希望输出的波形作为指令信号,把实际波形作为反馈信号,通过两者的瞬时值比较来决定逆 变电路各器件的通断,使实际的输出跟踪指令信号变化 常用的有滞 环 比 较 方 式 和三 角 波 比 较 方 式
6.3.2
三角波比较方式
基本原理
不是把指令信号和三角波直接进行比较,而是闭环控制 把 指 令 电 流 i * U 、 i * V 和 i * W 和 实 际 输 出 电 流 i U 、 i V 、 i W 进 行 比 较 ,求 出 偏 差 ,放 大 器 A 放 大 后 ,再 和 三 角 波 进 行 比 较 , 产 生 PWM 波 形 放大器 A 通常具有比例积分特性或比例特性,其系数直接影响电流跟踪特性
采用滞环比较方式实现电压跟踪控制
把 指 令 电 压 u*和 输 出 电 压 u 进 行 比 较 , 滤除偏差信号中的谐波, 滤波器的输出送入滞环比较器, 由比较器输出控制开关通断,从而实现电压跟踪控制 和电流跟踪控制电路相比,只是把指令和反馈从电流变为电压 输 出 电 压 PWM 波 形 中 含 大 量 高 次 谐 波 , 必 须 用 适 当 的 滤 波 器 滤 除Biblioteka *参数的影响
滞环环宽对跟踪性能的影响:环宽过宽时,开关频率低,跟踪误差大;环宽过窄时,跟踪误差 小,但开关频率过高 电抗器 L 的作用:L 大时,i 的变化率小,跟踪慢 L 小时,i 的变化率大,开关频率过高
Ud 2 Ud 2
VD1 i
VD2
V1 + i* - i
V2
负载
L 图6-22
图 6-22