裁板锯偏转机构运动关系的反求设计与仿真
创新设计钢板翻转机构

创新设计钢板翻转机构机构创新设计说明书设计题目钢板翻转机翻转机构设计学校南京农业大学工学院工学院(系) 材料成型及控制专业班级材控(02)班学号 33310228 报告人郝宇指导老师肖茂华完成日期 2012 年 10 月 26 日一、课题要求1.1机具功能:实现将钢板反转180度。
实现方式:通过左夹板反转110度送至右夹板,右夹板翻转80度实现。
已知条件:原动件由旋转式电动机驱动;每分钟翻钢板十次;许用传动角为50度。
二、课题分析2.1、课题分析:工作部分由左右夹板两部分组成。
左夹板需要实现由水平到铅垂位置左侧十度位置的往复为步骤一;右夹板需实现当左夹板转至从铅垂偏左十度时,由右侧水平转至贴至左侧夹板为步骤二,同左夹板共同运动二十度为步骤三,回到右侧水平为步骤四。
2.2机构设计:两夹板的转动可用齿轮机构转动来保证步骤二两夹板能贴一起运动的速度要求,但是匀速转动工作效率底,难保证每分钟翻转钢板十次,不予采用;左夹板运动用曲柄摇杆机构实现,右夹板用凸轮机构实现,虽然能够实现课题要求,但凸轮的设计非常规,求解复杂,不予采用;左右夹板运动由两组曲柄摇杆机构实现(通过一定方式简化课题要求,使左夹板在右夹板至铅垂右十度与之贴合,而转变成八十度的来回摆动)。
二、工作机构设计2.1机构设计简述2.1.1运动过程简化:左右夹板加电磁铁,并且使右夹板磁性更大;左侧加电磁铁,接电铜片设计为比一百一十度略小。
已实现钢板能被左夹板稳妥的送至右侧并且与右夹板顺利实现衔接。
2.1.2左右夹板运动过程实现:左右夹板用两组各自独立运动的曲柄摇杆机构实现。
若采用两个电机浪费动力,一组出现故障容易发生危险,设计用一个电机带动两组机构一起运动。
设计左右夹板曲柄轴线在一起,以简化电机与两机构的衔接。
2.2方案详述2.2.1方案一运动简图:设计计算选定AD=1500,当右夹板与左夹板贴合时 CD=500,α,,,:,β,,,,:222222L,L,ACAD,CD,AC43COS,,,, 在三角形ACD中, ADCDL4L32**2**222即AC,L,L,2*L*L*COS,,AC,L2,L1 4343222222AD,CD,ACL,L,AC11431COS,,,,在三角形ACD中, 1ADCDL4L32**2**1 222即AC,L,L,2*L*L*COS,,AC,L,L 143432122222,,L,L,L,L,2*L*L*COS,,1500,500,2,1500,500,COS20: 214343 由(1)(2)得:L2=1423.52, L1=379.27222AG,FG,AF在三角形AFG中,cos, 2*AG*FG222,,AGFGAF,,COS在三角形AFG中, L22=1800, L12=311.08 2*AG*FG计算结果:左半机构:L=379.27, L=1423.52, L=500, L=1500 1234右半机构:L=311.08, L=1800, L3=500, L=1929.01 12224杆长关系检验:左半机构:L+L=L+L=1879.27<L+L=1923.52 minmax1423右半机构:L+L=L+L2240.09<L+L=2300 minmax124=23整体分析:连杆到位情况:A(311.08,311.08),E(1.69,278.7),E(396.22,11.88), 12E(622.1,317.18),F(1791.91,466.04), 31F(2175.02,287.97),F(2421.75,353.09),G(2175.02,784.22) 23解析法检验,从动二杆组FEA的模式值表达式可以列出。
往复式切割器偏心轮曲柄摆杆机构运动仿真

往复式切割器偏心轮曲柄摆杆机构运动仿真杨莉;马赛;贺刚;高晓宏【期刊名称】《农业工程》【年(卷),期】2015(005)001【摘要】阐述了往复式切割器的驱动机构——偏心轮曲柄摆杆机构的基本结构与工作原理,运用矢量方法对机构的运动规律进行了分析和理论推导,得出了机构的运动方程;利用动力学仿真软件ADAMS对该机构进行了运动仿真分析,得到了运动曲线图和对机架的激振力大小及变化规律.仿真结果表明:当输入转速为400 r/min时,切割器的运动周期是0.15s,行程76 mm,速度为-1.5 ~1.73 m/s,加速度为-69.5~68.6 m/s2;切割器运动时对机架产生的作用力为简谐载荷,当输入转速为469r/min时,载荷大小为1 393 N.通过理论与仿真分析,为偏心轮曲柄摆杆机构的优化设计和动力学分析提供了理论依据.【总页数】5页(P59-62,66)【作者】杨莉;马赛;贺刚;高晓宏【作者单位】中国农业机械化科学研究院呼和浩特分院,呼和浩特010010;中国农业机械化科学研究院呼和浩特分院,呼和浩特010010;中国农业机械化科学研究院呼和浩特分院,呼和浩特010010;中国农业机械化科学研究院呼和浩特分院,呼和浩特010010【正文语种】中文【中图分类】S225.2+9【相关文献】1.基于UG平台的往复式切割器的运动仿真分析 [J], 吴艳英;吴锦行2.曲柄滑块机构连杆轨迹的同源机构与运动仿真 [J], 吴鑫;宋磊;张海军3.用MATLAB开发曲柄摆杆机构的运动仿真程序 [J], 魏国前4.基于MATLAB的偏心轮机构运动仿真系统 [J], 王华杰5.基于ADAMS的曲柄摆杆机构的运动分析 [J], 程熊豪因版权原因,仅展示原文概要,查看原文内容请购买。
机械创新设计反求设计与创新课件

机械创新设计产反求品设生计与产创新
变异设计
❖ 8.1.3 反求设计的研究对象 从工程技术角度分析,反求设计的研究对象一般分为三类。
它们分别是实物反求、软件反求和图片反求。反求对象应该 是比较先进的技术或产品;也可能是自然界的产物,例如反 求人体结构进行再植手术等。
机械创新设计反求设计与创新
材料的组织结构是指材料的化学成分及结构组织情况,可用显微镜观察,然后通过 计算机描述。
材料的工艺反求是指材料的成形方法,包括铸造、锻压、挤压、烧结、各种机加工 以及各种热处理等。
材料的力学性能反求可以通过各种测试仪器,如应力应变仪、硬度计等进行测量, 通过对材料各种力学性能的测试还可以反求出材料的热处理方法,以及材料的主要成 分。
机械创新设计反求设计与创新
➢ 2.功能原理的反求
功能原理的反求也是一个分析过程。对于一个已知产品,其总功 能是已知的,但深入分析其组成结构时,会发现产品的各组成部分的 分功能,乃至功能元并非全了解,因此很有必要首先分析组成产品各 部分存在的意义。其次应深入分析实现这一功能的工作原理,是简单 的机械效应,或是气动与液压的效应,还是电磁等效应;是采用了分 割,还是合并原理等。掌握了功能原理,就可以变被动为主动,开发 出实现同样功能的不同原理解,也就实现了从反求到创新的过程。
❖ 8.1.2 反求设计的含义 人们通常所指的设计是正设计,是由未知到已知和由想象到现实的
过程。当然这一过程也需要运用类比、移植等创新技法,但产品的概 念是新颖的,是独创的。
反求设计则不然,虽然为反设计,但绝不是正设计的简单逆过程。 因为针对的是别人已知和现实的产品,而不是自己的,所以也不是全 知的。是一个虽然知其然,但不知其所以然的问题。因为一个先进成 熟的产品凝聚着原创者长时间的思考与实践、研究与探索,要理解、
动画仿真辅助“木材加工机械与刀具”教学的探索与实践

动画仿真辅助“木材加工机械与刀具”教学的探索与实践张国梁;刘志军;黄大庄【摘要】根据河北农业大学"木材加工机械与刀具"课程的教学现状,从动画仿真辅助"木材加工机械与刀具"课程的教学实践入手,探讨了动画仿真辅助课堂教学的方法和应用,从直齿圆柱铣刀三维模型的建立、铣刀固有振动形态的分析、铣削运动仿真、铣削过程动力学、铣刀受载应力分析、动画仿真辅助教学的有益效果等6个方面加以阐述。
实践证明,在"木材加工机械与刀具"的教学中,动画仿真作为传统教学手段的补充,有效地提高了学生对木材加工机械和刀具的认知能力,激发了学生学习的主动性和积极性,取得了良好的教学效果。
【期刊名称】《中国林业教育》【年(卷),期】2011(029)006【总页数】4页(P58-61)【关键词】动画仿真;木材加工机械;刀具;教学实践【作者】张国梁;刘志军;黄大庄【作者单位】河北农业大学林学院,河北保定071000;河北农业大学林学院,河北保定071000;河北农业大学园林与旅游学院,河北保定071000【正文语种】中文【中图分类】G642在“木材加工机械与刀具”课程的教学中,几乎每一个教学单元都会碰到很多实际的机械运动过程,很多复杂的机械结构和刀具运动与切削过程都需要想象。
这对于非机械类的木材科学与工程专业学生而言具有很大的难度。
为了较好地解决这一问题,笔者除了合理使用多媒体课件和传统手段进行教学外,还应用Pro/Engineer、ADAMS和 ANSYS等软件对教学内容进行了仿真研究,重点制作了以动画仿真为主要内容的专题式教学课件,使学生感受知识点更为直观、可视化。
一、“木材加工机械与刀具”课程教学现状木材科学与工程作为河北农业大学林学院本科教学中唯一的工科专业,其教学计划中的“木工机械”“木材切削与刀具”是服务于木材加工利用方向的主要课程。
由于机械类课程的知识理论较深,加上“木材加工机械与刀具”不灵活的传统授课方式,使学生觉得课程内容深而枯燥,不能激发起学习兴趣。
摆式剪切机的正反转运动学仿真分析
v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , B a o t o u 0 1 4 0 1 0 , C h i n a )
Ke y wo r d s : AD AMS;s wi n g - t y p e p l a t e s h e a r ;p o s i t i v e a n d r e v e r s e r o t a t i o n ;k n e ma t i c s Ab s t r a c t : h e s w i n g — t y p e p l a t e s h e a r mR S b y t h e c o u n t e r c l o c k w i s e r o t a t i o n t h r o u g h t h e s p e e d r e d u c e r t o c a r r y o u t s h e a r r o l l i n g i n t h e
关键 词 : A D A M S ; 摆式剪切机 ; 正反转 ; 运动学
中图分类号 : T H 1 2 2 文献 标 识 码 : A
摘
要: 现场摆式剪切机的剪切机构采用减速器逆时针( 从 传动侧方 向观 察机架 ) 转动进行轧 件剪切 , 由 于上刀 台
在摆架滑 槽内滑动 , 会使摆架滑槽内一侧的铜板 磨损 . 为提高摆式剪切机铜板的使 用寿命 , 设 想将曲 轴驱 动改为顺 时针反转以改变成 另一侧磨损来延长检修 周期 . 改变转向对机构运动影响如何是值得探讨的. 利用 A D A MS运动学 仿真软件 , 进行摆式剪切机正反转时各构件的运动状态模 拟 , 将反转与正转作 比较 分析 , 研 究调整偏心 曲轴转向对
北航机械原理--钢板翻转机构--运动简图设计
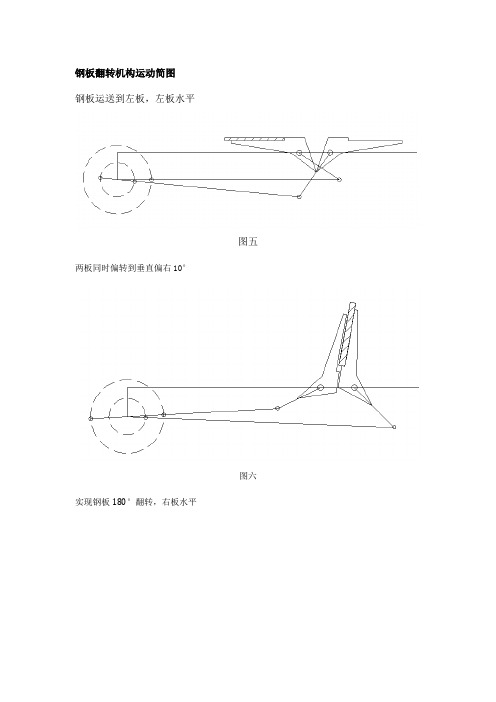
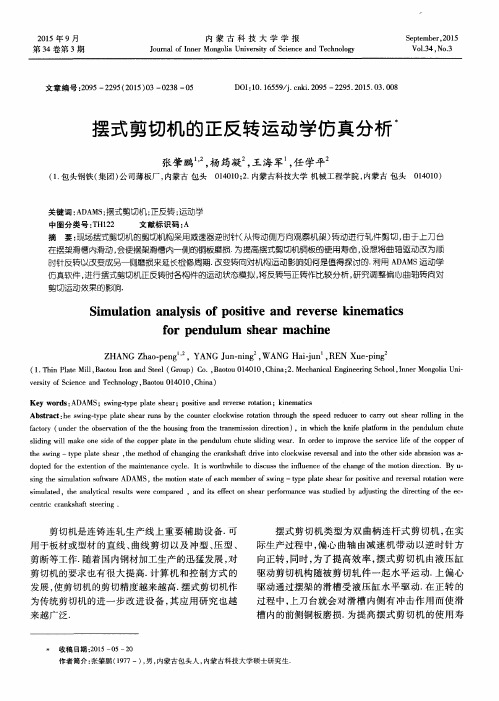
钢板翻转机构运动简图钢板运送到左板,左板水平图五两板同时偏转到垂直偏右10°图六实现钢板180°翻转,右板水平图七如图五、图六所示,分别是两套曲柄摇杆机构的极限位置。
当曲柄以5r/min 速度顺时针旋转了180°时,两摇杆恰好同时到达极限位置,使交接钢板的重合位置位于垂直方向向右偏10°的位置,再转180°同时回到初始位置,且曲柄的转动是匀速的,从而实现同时进程,同时回程,往复循环。
设计计算左夹板曲柄摇杆机构的尺寸设曲柄长度1a 、连杆长度1b (在图中体现为QA,TB 长度)、摇杆长度1c 。
1O A 、1O B 为摇杆的两极限位置,1O C 为1AO B ∠D 的角平分线。
根据题意,1AO C ∠=49°1BO C ∠=49°。
过P 作1O C 的垂线,分别交过曲柄轴线的水平线于点A 、C 、B 。
设计尺寸:O 1C,O 2M450mm PC2000mm在图中: PA=PC-AC=1b -1a ③PA=PT+TB-AC-BC=1a +1b - 2AC ④ 由③④得: 1a = ACAC= BC= O 1C tan 1AO C ∠=450* tan49°=517.67mm 即: 1a =517.67mm 又因 1b + 1a = PC +BC 解得: 1b = PC =2000mm1c =11450cos cos 49oO C AO C =∠=685.91mm左摇杆长1c =685.91mm 左曲柄长1a =517.67mm 左连杆长1b =2000mm 右边曲柄摇杆机构的尺寸设曲柄长度2a 、连杆长度2b 、摇杆长度2c 。
2O D 、2O E 为摇杆分别为水平,垂直向右偏8°的两位置,2O F 为2DO E ∠的角平分线。
根据题意,∠2DO F =∠2EO F =41°。
过P 作2O F 的垂线,过O 2作2O M ⊥PM 于点M 。
双偏心摆式飞剪刀刃运动学分析及仿真
1 飞 剪结构 组成和工作原理
双 偏心摆式飞剪 ( 以下 简 称 “ 飞 剪 ” )主 要
图1 双偏心摆式飞剪 的主要组成部件
它 的设计 有 以下基 本 要求 :
有飞剪本体 、送料 系统 、传动 系统 、控 制系统和 些辅 助 机构 等组 成 n ,双 偏心 是 指上 下 刀架 都具
与轧 制 速 度 必 须满 足 设 计 要 求 。上 刀 架 的重 量 在
2 飞 剪 的设 计 应 满 足 的要 求及 相 关 参数
1 )飞 剪 的特 点 是 能横 向剪 切运 动 着 的 扎件 ,
收稿日期:2 0 1 3 - 0 1 -1 2 基 金项 目:国家科技支撑计划课题基金 ( 2 0 1 2 B AF 0 1 B 0 2 )
0 引言
飞剪 的发展始于1 9 世 纪 末 , 经过 多年 发 展 , 对 飞 剪 不 断 地 改进 和 提 高 。 摆 式 飞剪 已成 为钢 铁 生 产 企 业 连 续 轧 制 生 产 线 上 的重 要 的设 备 之 一 , 其 工 作 性 能 好 坏 直 接 影 响 轧 制 生 产 线 的生 产 效 率 和 产 品 切 口质 量 。本 文 基 于 飞 剪 能 更 好 的 满 足 生
产要 求,对 其结构进行简化 ,推导 了刀刃与 曲轴 角 速 度 的关 系 式 ;并 对 飞 剪 的 运动 进 行 仿 真 ,用 线 图来 分析 其 运动 学性 能 。
1 . 上刀栗 2 .F 刀架 3 . 滑动轨道 4 . 轴承盖 5 . 双 偏 心 曲 轴
6 . 销轴 7 . 连接杆 8 . 支架 9 . 轴承端盖 1 0 . 底座
( 1 )带 钢 的厚度 :0 . 3 0 ~1 . 6 0 mm:
往复式割刀曲柄连杆机构的运动特性仿真设计.doc
往复式割刀曲柄连杆机构的运动特性仿真设计说明书目录1绪论 ............................................................................................................................................. - 1 -1.1切割器的要求.................................................................................................................... - 1 -1.2影响切割质量的因素........................................................................................................ - 1 - 2切割器的参数选取和计算.................................................................................................... - 2 -2.1 切割器的种类................................................................................................................... - 2 -2.2动刀片的结构参数............................................................................................................ - 2 -2.3曲柄转速的确定................................................................................................................ - 3 -2.4 收割机的进距计算........................................................................................................... - 4 -2.5切割器功率计算................................................................................................................ - 4 -2.6 驱动曲柄所需的转矩....................................................................................................... - 4 - 3切割图的绘制与分析 ............................................................................................................. - 5 -3.1切割图的绘制步骤............................................................................................................ - 5 -3.2切割图分析........................................................................................................................ - 5 - 4曲柄柄连杆机构的建模与仿真........................................................................................... - 5 -4.1 技术路线........................................................................................................................... - 6 -4.2曲柄连杆的机构简图........................................................................................................ - 6 -4.3 曲柄连杆机构各零件的建模与装配 ............................................................................... - 6 -4.4干涉检验............................................................................................................................ - 8 -4.5基于ADAMS的往复式割刀曲柄连杆机构的仿真........................................................ - 9 - 5机构优化.......................................................................................................... 错误!未定义书签。
模具CAD第15章 弯锯机构的建模、仿真与优化
15.2 几何建模
15.2.2 创建连杆与滑块 单击连杆建模工具图标 在
point6/point8,point12/point13,point4/point5,point1/point11间建立 连杆,工作屏幕区显示如图:
15.3施加约束
15.3.1 在联合构件建立旋转副 左键单击旋转副 ,选择1 location和Normal To
单位名称(Units)栏中选择“MMKS -mm, kg, N, s, deg”:
15.1 工作环境设置
15.1.2 设置工作环境 对于这个模型,网格间距需要设置的合适以满足要ADAMS/View菜单栏 中,选择设置(Setting)下拉菜单中的工作网格(Working Grid)命令。 系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X和Y分别设置
15.2 几何建模
15.2.2 创建连杆与滑块 用同样的方法在part5,part6,part7和part8,part9,part10以及part构件三 连杆一构件的结构,工作屏幕区显示如图所示:
15.2 几何建模
15.2.2 创建连杆与滑块 在ADAMS/View零件库中选择圆柱体 Cylinder ,圆柱体的参数选择New
显示如图。
15.7 优化模型
简单认为优化是通过建立合适的函数关系让弯锯机构能够稳定运行,刚 开始试用了很多函数都不是想要的结果,例如 360d*cos(time),step(time,0,0,1,2)等都试用不成功,最后选择了 step(time,0,0,3,-0.4)+step(time,3,0,6,0.6)+step(time,6,0,9,0.4)+step(time,9,0,12,0.6)+step(time,12,0,16,-0.4),运行效果比较好。
采棉机摘锭的逆向反求与五轴联动数控加工仿真
采棉机摘锭的逆向反求与五轴联动数控加工仿真王伟;孙文磊【摘要】摘锭是采棉机的重要组成部分,其结构的改进和加工也是采棉机生产效率和性能提高的关键.实践表明,摘锭结构的改进和加工难点在于其摘锭前面的勾齿部分.为此,结合GEOMAGIC逆向重构功能与UG NX6.0 CAM功能详细介绍了在只有摘锭实体情况下对现有摘锭实体在逆向反求的基础上进行五轴联动数控加工仿真的过程.【期刊名称】《农机化研究》【年(卷),期】2010(032)009【总页数】4页(P33-36)【关键词】采棉机;逆向反求;刀具;刀轨;加工仿真【作者】王伟;孙文磊【作者单位】新疆大学,机械工程学院,乌鲁木齐830008;新疆大学,机械工程学院,乌鲁木齐830008【正文语种】中文【中图分类】TP391.910 引言随着农业现代化的迅速发展,采棉机的更新换代速度日趋加快,其设计、制造速度的快慢直接制约着采棉机的发展。
摘锭作为采棉机的重要组成部分,其结构合理改进的效率和加工质量的好坏直接影响着采棉机的生产周期和采棉质量,因此提高摘锭加工质量和生产效率对提高采棉机的性能和缩短生产周期起着至关重要的作用。
在现实生活中,由于原始图纸遗失等各种原因,可能有时只能得到实体摘锭而得不到摘锭的三维CAD模型,这样对摘锭再生产和在现有摘锭的基础上进行创新带来了一定的困难;而过去采用的手动测绘得出尺寸后再建模的手段因精度低的缺点已远远不能满足于如今采棉机高速发展的需求。
此外,由于摘锭结构比较复杂,利用一般的数控机床无法加工或者加工精度不够高,所以摘锭的加工也一直是加工的难点。
借助逆向重构软件GEOMAGIC可以很完美地实现从现有摘锭实体到生成摘锭三维CAD模型的过程,而且在此基础上可以进行产品再生产、模型改进等工作,大大节省了产品研发时间,缩短了开发周期,而UG NX6.0的CAM功能对于各种型面的数控加工功能也很令人满意。
鉴于两者的优点,本文借助于GEOMAGIC 软件的逆向反求功能与UG NX6.0的CAD/CAM功能结合,合理地安排了工艺过程,使用五轴联动数控机床实现了采棉机摘锭的加工过程仿真。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Absr c :n v e o h r b e ta o l ae t n r lt n h p o h ld e e t n s se o o r utn a t a t I iw ft ep o lm h tc mp i td moi eai s i fte b a e d f ci y tm fb a d c t gs ws c o o l o i ma e k sMPU r ga p o rmmi gd f c l, h u cin r lt n b t e h xe so ou fte c n e t g rd a d s r w o n i iu t t ef n to eai ewe n te e tn in v lmeo o n ci o n c e rd o h n
( . ho o nier g B in oet nvr t B in 0 0 3 C ia2Sa ga Y eogWod okn 1 col f gnei , e i F rsyU i sy e ig10 8, h ;. n hi utn o w rig S E n jg r e i, j n h
n ls 0 a d 3 。 b s do c , 6 3 Z b a dc t gs s v e e i da dp o u e b th s a ge e1 。 n 5 , a e n ih MJ 1 0 o r t n w a e e nd sg e n rd c di ac e . r a wh u i a h b n n
b t e ea o et sl a n to . p rm e t h w h tte o tie i e re r ri h n m u wh nt ed fe t n ewe n t b v a i r f cin Ex e i n ss o t a ban dln a ro t emii m e h elci h wo ne u h s o
o eDe e t n- e h n s o a d Cu t g S ws ft f c i M c a im fBo r ti a h l o n
CH EN G ng e , TA N Pe -l。 Yue h n , XU -d ng -s e g。 Ya o 2
第3卷 9
第8 期
林 业 机 械 与 木 工 设 备 F R S R C I E Y &WO D R I G E U P N O E T Y MA H N R O WO K N Q IME T
V 1 9N. 。 3 。 8 Ag21 u.0 1
2 1 年 8月 01
连杆与丝杠 系统 的伸 长量 X和与之 对应锯 片偏转 角度 0 间的函数 关 系。从采用 L gag 插值 仿真得 到的系统仿 之 arn e 真 曲线可知 , 四次多项式传递 函数可以满足运 动关 系的精度要 求, 采用 Ma a t b仿真最终确 定二者之 间的 关系为一次 l
函数 。通过 实验得 出当偏转角为 l。 3 。 0和 5时计算得到的直线误 差最小, 据此设计的裁板锯 M 6 3 Z已经批 量生产。 J 10 关键词 : 求设 计 ; 反 运动 关 系; 裁板锯 ; 仿真设计
中图分类号 :’ 4 ; 7 . , 6 2 I S I 1 2 文献标识码 : A 文章 编号 :0 14 6 (0 10 — 0 9 0 10 - 4 2 2 1 )8 0 3u a i n o he M o i n l to h p v r eDe i n a d i l to ft to Rea i ns i
smu ainC r eo es se o mn d u igL ga g e p lt nsmuain s o h t u ri oy o M a se n t n i lt u V f h y tm bt e sn a n ei r oai i lt h wst a a t p ln mi t n fr u ci o t r nt o o q c r f o C l me tt e p e iin r q ie n s o e mo in rlto .T e Malb- a e i lt n f al eemie e rlt n al e rcso e u rme t ft t eain h t h h o a b s d smu ai n l d tr n st eai o i y h o
s se a d t e c re p n e tb a e d f cin a ge i ba n d y a pyn e e s e in d v lp n d . Th y tm n o rs o d n ld e e t h l o n l s o ti e b p lig a r v re d sg e eo me tmo e e
裁板 偏 机构 动 系的 设计与 真 锯 转 运 关 反求 仿
程 朋乐 ‘ 谭 月胜 - 许 亚东 : 。 ,
(. 1 北京林业 大学工 学院, 京 10 8 ;. 北 0 0 3 2上海跃 通木工机械 设备有 限公 司, 海 2 10 ) 上 0 10
摘 要 : 对裁板锯锯 片偏转 系统运动关 系复杂不 易于单 片机编程的 问题 , 出了应用反求设计 开发模式求 出 针 提