AT说明书
AT8511 8512 用户手册说明书

SHENZHEN LANGPU ELECTRONIC TECH.CO.,LTD深圳市深南中路南光捷佳大厦1402室TEL**************839801588304741583986300FAX**************83047419网址:综合推广网 衡器烘箱网邮箱:***********QQ:374542908MSN:******************FAX**************安全须知当你发现有以下不正常情形发生,请立即终止操作并断开电源线。
立刻与安柏科技销售部联系维修。
否则将会引起火灾或对操作者有潜在的触电危险。
z仪器操作异常。
z操作中仪器产生反常噪音、异味、烟或闪光。
z操作过程中,仪器产生高温或电击。
z电源线、电源开关或电源插座损坏。
z杂质或液体流入仪器。
安全信息为避免可能的电击和人身安全,请遵循以下指南进行操作。
免责声明用户在开始使用仪器前请仔细阅读以下安全信息,对于用户由于未遵守下列条款而造成的人身安全和财产损失,安柏科技将不承担任何责任。
仪器接地 为防止电击危险,请连接好电源地线。
不可在爆炸性气体环境使用仪器 不可在易燃易爆气体、蒸汽或多灰尘的环境下使用仪器。
在此类环境使用任何电子设备,都是对人身安全的冒险。
不可打开仪器外壳 非专业维护人员不可打开仪器外壳,以试图维修仪器。
仪器在关机后一段时间内仍存在未释放干净的电荷,这可能对人身造成电击危险。
不要使用已经损坏的仪器 如果仪器已经损害,其危险将不可预知。
请断开电源线,不可再使用,也不要试图自行维修。
不要使用工作异常的仪器 如果仪器工作不正常,其危险不可预知,请断开电源线,不可再使用,也不要试图自行维修。
不要超出本说明书指定的方式使用仪器超出范围,仪器所提供的保护措施将失效。
声明:!, $, #,安柏标志和文字是常州安柏精密仪器有限公司的商标或注册商标。
Email:***********FAX**************AT8511/8512直流电子负载用 户 手 册User’s Manual简体中文ChineseSimplifiedFEB, 2008第1版Rev.A3@%常州安柏精密仪器有限公司©2005-2009 Applent T echnologies, Inc.有限担保和责任范围常州安柏精密仪器有限公司(以下简称Applent)保证您购买的每一台AT8511/8512在质量和计量上都是完全合格的。
AT命令使用者使用说明书

AT命令使用者使用说明书名目1 引言 42 at命令使用说明 42.1 终端状态命令 42.1.1 準备就绪 42.1.2 重新启动 42.1.3 猎取模组状态 42.1.4 猎取简讯容量 42.1.5 猎取**本容量 52.1.6 猎取imsi资讯 52.1.7 设定imsi资讯 62.1.8 猎取nam资讯 62.1.9 设定nam资讯 72.1.10 猎取基站id资讯 72.1.11 上报讯号条资讯 72.1.12 猎取讯号强度 72.1.13 上报讯号强度 82.1.14 猎取时间资讯 82.1.15 上报网路状态资讯 82.1.16 猎取网路资讯 92.1.17 猎取漫游资讯 102.1.18 猎取ruim状态 102.1.19 猎取软体版本 102.1.20 猎取厂商资讯 112.1.21 猎取模组校準测试资讯 112.1.22 at命令格式 112.2 简讯命令 112.2.1 传送简讯 112.2.2 收到简讯提示 122.2.3 阅读简讯 142.2.4 单条删除简讯 152.2.5 删除全部简讯 152.2.6 转变简讯标识 152.2.7 特殊字元处理 152.3 语音资讯命令 162.3.1 收到语音资讯提示 162.4 语音**命令 162.4.1 拨打语音** 162.4.2 结束通话语音** 162.4.3 接听语音** 162.4.4 呼叫等待 172.4.5 三方通话 172.4.6 语音**状态提示 172.4.7 来电号码提示 182.4.8 传送dtmf音 182.4.9 通话中静音设定 182.4.10 通话中音量设定 192.4.11 通话中mic 增益调整 192.4.12 通话中receiver 增益调整 192.4.13 切换语音通道 202.4.14 发按键音 202.5 附加业务命令 202.5.1 恳求附加业务命令 202.5.2 flash讯息提示212.6 **本命令 212.6.1 读uim卡**本 212.6.2 新增uim卡**本 212.6.3 删除uim卡**本 222.6.4 猎取uim卡最大支援的条数 222.7 声音命令 232.7.1 话筒通话时静音设定 232.7.2 设定音讯测试232.8 服务命令 232.8.1 猎取esn 232.8.2 开启/关闭pin码 242.8.3 修改pin码 242.8.4 校验pin码 252.8.5 校验puk码 252.9 机卡一体相关係统引数设定命令 262.9.1设定 home sid/nid 262.9.2 猎取 home sid/nid 262.9.3 设定 lock sid/nid 272.9.4猎取 lock sid/nid 272.9.5设定emergency call number 272.9.6猎取emergency call number 282.9.7设定prl enabled 282.9.8猎取prl enabled 282.9.9猎取slot cycle index 292.9.10猎取当前卡的型别292.9.11设定system pref 292.9.12猎取system pref302.9.13 sp开锁 302.9.14 更改spc 312.10 附加命令 312.10.1 关机注册 312.11 utk命令 312.11.1 uim proactive cmd 312.11.2 envelop cmd 362.11.3 terminal response: 373 主要操作流程 383.1 开机流程 383.2 pin码开启开机流程 39编写本《at命令使用者使用说明书》的目的在于具体地说明模组软体的at命令功能需求,以利于模组软体的设计、测试和验收。
安科变频器 AT500系列变频器用户手册说明书

AT500系列变频器用户手册封面前言AT500系列变频器用户手册前言AT500系列变频器是高性能矢量型和转矩控制型变频器,产品采用了与目前国际领先技术同步的无速度传感器矢量控制技术和转矩控制技术,不仅具有与国际高端变频器同样优异的控制性能,同时还结合中国的应用特点,进一步强化了产品的可靠性和环境的适应性以及客户化和行业化的设计,能够更好地满足各种传动应用的需求。
注意事项●为说明产品的细节部分,本手册中的图例有时为拆下外罩或安全遮盖物的状态;使用本产品时,请务必按规定装好外壳或遮盖物,并按照手册的内容进行操作。
●本手册中的图例仅为了说明,可能会与您订购的产品有所不同。
●本公司致力于产品的不断改善,产品功能会不断升级,所提供的资料如有变更,恕不另行通知。
●如您使用中有问题,请与本公司各区域代理商联系,或直接与本公司客户服务中心联系。
客服电话:*************传真:*************24小时技术服务电话:133****0378133****0877AT500系列变频器用户手册安全注意事项安全注意事项安全标记说明:危险:错误使用,可能会导致火灾或人身严重伤害,甚至死亡!注意:错误使用,可能导致人身中等程度的伤害或者轻伤,以及发生设备损坏!█用途危险●本系列变频器用于控制异步电动机的变速运行,不能用于其他用途,否则可引起变频器故障或火灾!●本系列变频器不能简单的应用于医疗装置等直接与人身安全有关的场合!●本系列变频器是在严格的质量管理体系下生产的,如果变频器的故障可能会导致重大事故或损失,则需要设置冗余或旁路等安全措施,以防万一。
█到货检验注意●若发现变频器受损或缺少零部件则不可安装,否则可能发生事故!█安装注意●搬运、安装时,请托住产品底部,不能只拿住外壳,以防砸伤脚或损坏变频器!●变频器要安装于金属等阻燃物上,远离易燃物体,远离热源!●安装作业切勿将钻孔残余物落入变频器内部,否则可能引起变频器故障!●变频器安装于柜内,电控柜应配置风扇、通风口,柜内应构建有利于散热的风道。
AT32电机库使用指南说明书

AN0064应用笔记AT32 电机库使用指南前言这份文件描述了如何使用AT32电机函数库,文中分别针对环境建立、电机库架构、头文件设定内容、个别函数、以及实际应用范例的程序结构等一一说明。
支持型号列表:目录1电机库算法概述 (7)2环境准备 (9)2.1硬件环境准备 (9)2.2软件环境准备 (9)3电机库文档说明 (11)4电机库函数使用说明 (24)4.1通用电机库函数 (24)4.2矢量控制电机库函数 (35)4.3六步方波控制电机库函数 (48)5电机库应用范例程序结构 (52)5.1状态机 (52)5.1.1状态描述 (52)5.1.2状态机流程说明 (52)6版本历史 (54)表目录表1. 对应闪存存储空间之ROM配置表 (9)表2. 电机库文档总表 (12)表3. 模式宏定义 (13)表4. 控制参数宏定义 (13)表5. 驱动器参数宏定义 (17)表6. 电机参数宏定义 (17)表7. 周边配置相关函数 (21)表8. 电机控制相关中断函数 (22)表9. 电机库枚举列表 (22)表10. 函数get_fw_id (24)表11. 函数mc_param_init (24)表12. 函数current_offset_init (25)表13. 函数current_read_foc_3shunt (25)表14. 函数current_read_foc_2shunt (25)表15. 函数current_read_foc_1shunt (26)表16. 函数current_read_bldc (26)表17. 函数read_hall_state (26)表18. 函数hall_rotor_angle_get (27)表19. 函数hall_delta_theta_calculation (27)表20. 函数hall_at_zero_speed (27)表21. 函数pid_set_kp (28)表22. 函数pid_set_ki (28)表23. 函数pid_set_kd (28)表24. 函数pid_set_intergral (29)表25. 函数pid_get_kp (29)表26. 函数pid_get_ki (29)表27. 函数pid_get_kd (30)表28. 函数pi_controller (30)表29. 函数pid_controller (31)表30. 函数command_ramp (31)表32. 函数moving_average_update (32)表33. 函数reset_ma_buffer (32)表34. 函数ma_filter (32)表35. 函数lowpass_filter_init (33)表36. 函数lowpass_filtering (33)表37. 函数atan2_fixed (34)表38. 函数encoder_count_reset (35)表39. 函数encoder_alignment_index (35)表40. 函数encoder_alignment (35)表41. 函数enc_rotor_angle_get (36)表42. 函数enc_rotor_speed_get (36)表43. 函数enc_speed_get_MTmethod (36)表44. 函数enc_error_check (37)表45. 函数position_cmd_ramp (37)表46. 函数svpwm_3_2shunt (38)表47. 函数svpwm_1shunt (38)表48. 函数pwm_shift (39)表49. 函数fw_clear (39)表50. 函数fw_curr_ref (39)表51. 函数trig_functions (40)表52. 函数foc_clarke_trans (40)表53. 函数foc_park_trans (41)表54. 函数foc_inver_park_trans (41)表55. 函数foc_circle_limitation (41)表56. 函数foc_open_loop_ctrl (42)表57. 函数observer_pll_clear (42)表58. 函数startup_openloop (42)表59. 函数startup_alpha_axis (43)表60. 函数flag_status startup_angle_init (43)表61. 函数flag_status startup_angle_init (44)表62. 函数foc_sensorless_angle_init (44)表64. 函数current_angle_init_2_1shunt (45)表65. 函数motor_volt_calc (45)表66. 函数motor_volt_read (46)表67. 函数obs_pll_execute (46)表68. 函数rotor_angle_sensorless (46)表69. 函数bldc_output_config (48)表70. 函数disable_mosfet (48)表71. 函数adc_sample_point_set (49)表72. 函数bldc_sensorless_angle_init (49)表73. 函数angle_init_estimation (50)表74. 函数bldc_sensorless_detectEMF_config (50)表75. 函数bldc_emf_comp_read (51)表76. 函数bldc_emf_adc_read (51)表77. 文档版本历史 (54)图目录图1. AT32F413RCT7之ROM配置(Keil) (10)图2. 电机库控制程序架构图 (11)图3. 电机库文档结构说明图 (11)图4. PMSM反电势、霍尔状态与电气角的关系图 (19)图5. BLDC反电势、霍尔状态与MOS导通状态的关系图 (20)图6. 状态机流程图 (53)1 电机库算法概述电机库相关算法主要内容如下目标电机:三相永磁同步电动机(直流无刷电动机)控制模式:⏹FOC矢量控制⏹120︒方波控制三相PWM调制模式:⏹SVPWM⏹120︒导通PWM控制相电流检测模式:⏹三电阻电流检测⏹双电阻电流检测⏹单电阻电流检测和重构方式转子位置检测模式:⏹霍尔效应位置传感器⏹光电增量编码器初始转子位置估测模式:⏹三相电压矢量转子初始角度估测⏹两相电压矢量转子初始角度估测FOC弦波驱动的转子位置估测模式:⏹龙伯格估测器(Luenberger observer)反电势估测120︒方波控制的转子位置估测模式:⏹比较器回授反电势零交越点信号⏹ADC检测反电势零交越点有传感器FOC弦波控制模式:⏹电压矢量控制⏹转矩控制(电流矢量控制)⏹转速控制⏹弱磁控制⏹定位控制⏹回生刹车无传感器弦波控制模式:⏹开环启动⏹转矩控制(电流矢量控制)⏹转速控制⏹弱磁控制⏹回生刹车有传感器120︒方波控制模式:⏹120︒方波电压控制⏹转矩控制(120︒方波电流控制) ⏹转速控制⏹回生刹车无传感器120︒方波控制模式:⏹120︒方波电压控制⏹转矩控制(120︒方波电流控制) ⏹转速控制⏹回生刹车2 环境准备2.1 硬件环境准备需要准备硬件项目主要包括PMSM(BLDC)电机、AT-Link或第三方调试下载器以及一块电机控制板,若控制板使用AT-MOTOR-EVB电机发展板,则相关硬件配置可参考低压电机控制开发板使用手册。
雅特力 AT32F415系列 数据手册说明书

基于ARM®32位的Cortex®-M4微控制器,带64 K字节至256 K字节闪存、sLib、USB OTG、11个定时器、1个ADC、2个比较器、12个通信接口功能⏹内核:ARM®32位的Cortex®-M4 CPU−最高150 MHz工作频率,带存储器保护单元(MPU),内建单周期乘法和硬件除法−具有DSP指令集⏹存储器−从64 K字节至256 K字节的闪存程序/数据存储器− 18 K字节的系统存储器可作启动加载程序(Bootloader)用外,也可一次性配置成一般用户程序和数据区− 32 K字节的SRAM− sLib:将指定之主存储区设为执行代码安全库区,此区代码仅能调用无法读取⏹时钟、复位和电源管理− 2.6至3.6伏供电和I/O引脚−上电/断电复位(POR/PDR)、可编程电压监测器(PVD)− 4至25 MHz晶体振荡器−内嵌经出厂调校的48 MHz RC振荡器(25 °C达1 %精度,-40 °C至+105 °C达2.5 %精度),带自动时钟校准功能(ACC)−内嵌带校准的40 kHz RC振荡器−带校准功能的32 kHz晶体振荡器⏹低功耗−睡眠、停机、和待机模式− V BAT为ERTC和20个32位的后备寄存器供电⏹1个12位A/D转换器,0.5 μs转换时间(多达16个输入通道)−转换范围:0至3.6 V−一组采样和保持功能−温度传感器⏹2个比较器⏹DMA:14通道DMA控制器−支持的外设:定时器、ADC、SDIO、I2S、SPI、I2C、和USART⏹调试模式−串行线调试(SWD)和JTAG接口⏹多达55个快速I/O端口− 27/39/55个多功能双向的I/O口,所有I/O口可以映像到16个外部中断;几乎所有I/O口可容忍5V输入信号−所有I/O口均为快速I/O,寄存器存取速度最高f AHB/2⏹多达11个定时器−多达5个16位定时器+2个32位定时器,每个定时器有多达4个用于输入捕获/输出比较/PWM或脉冲计数的通道和增量编码器输入− 1个16位带死区控制和紧急刹车,用于电机控制的PWM高级控制定时器− 2个看门狗定时器(独立的和窗口型的)−系统时间定时器:24位自减型计数器⏹ERTC:增强型RTC,具亚秒级精度及硬件日历⏹多达12个通信接口− 2个I2C接口(支持SMBus/PMBus)−多达5个USART接口(支持ISO7816,LIN,IrDA接口和调制解调控制)− 2个SPI接口(50M位/秒),2个均可复用为I2S接口− CAN接口(2.0B主动),内置256字节的专用SRAM− USB 2.0全速设备/主机/OTG控制器,内置1280字节的专用SRAM,设备模式时支持无晶振(Crystal-less)− SDIO接口⏹CRC计算单元⏹96位的芯片唯一代码⏹封装− LQFP64 10 x 10 mm− LQFP64 7 x 7 mm− LQFP48 7 x 7 mm− QFN48 6 x 6 mm− QFN32 4 x 4 mm目录1介绍 (9)2规格说明 (10)2.1器件一览 (11)2.2概述 (12)2.2.1ARM®Cortex®-M4,配有DSP指令 (12)2.2.2存储器保护单元(MPU) (14)2.2.3闪存存储器 (14)2.2.4循环冗余校验(CRC)计算单元 (14)2.2.5内置SRAM (14)2.2.6嵌套的向量式中断控制器(NVIC) (14)2.2.7外部中断/事件控制器(EXTI) (15)2.2.8时钟和启动 (15)2.2.9启动模式 (17)2.2.10供电方案 (17)2.2.11供电监控器 (17)2.2.12电压调压器 (17)2.2.13低功耗模式 (18)2.2.14直接存储器访问控制器(DMA) (18)2.2.15增强型实时时钟(ERTC)和后备份寄存器 (18)2.2.16定时器和看门狗 (19)2.2.17内部集成电路总线(I2C) (21)2.2.18通用同步/异步收发器(USART) (21)2.2.19串行外设接口(SPI) (21)2.2.20内部集成音频接口(I2S) (21)2.2.21安全数字输入/输出接口(SDIO) (21)2.2.22控制器区域网络(CAN) (21)2.2.23通用串行总线OTG全速(USB OTG FS) (22)2.2.24通用输入输出口(GPIO) (22)2.2.26模拟/数字转换器(ADC) (22)2.2.27温度传感器 (22)2.2.28比较器(COMP) (23)2.2.29串行线JTAG调试口(SWJ-DP) (23)3引脚定义 (24)4存储器映像 (30)5电气特性 (31)5.1测试条件 (31)5.1.1最小和最大数值 (31)5.1.2典型数值 (31)5.1.3典型曲线 (31)5.1.4负载电容 (31)5.1.5引脚输入电压 (31)5.1.6供电方案 (32)5.1.7电流消耗测量 (32)5.2绝对最大额定值 (33)5.3工作条件 (34)5.3.1通用工作条件 (34)5.3.2上电和掉电时的工作条件 (34)5.3.3内嵌复位和电源控制模块特性 (35)5.3.4内置的参照电压 (36)5.3.5供电电流特性 (36)5.3.6外部时钟源特性 (44)5.3.7内部时钟源特性 (48)5.3.8PLL特性 (50)5.3.9存储器特性 (50)5.3.10EMC特性 (51)5.3.11绝对最大值(电气敏感性) (52)5.3.13NRST引脚特性 (55)5.3.14TMR定时器特性 (55)5.3.15通信接口 (56)5.3.16CAN(控制器局域网络)接口 (64)5.3.1712位ADC特性 (64)5.3.18比较器特性 (68)5.3.19温度传感器特性 (69)6封装特性 (70)6.1LQFP64 – 10 x 10 mm封装数据 (70)6.2LQFP64 – 7 x 7 mm封装数据 (72)6.3LQFP48 – 7 x 7 mm封装数据 (74)6.4QFN48 – 6 x 6 mm封装数据 (76)6.5QFN32 – 4 x 4 mm封装数据 (78)6.6热特性 (80)7订货代码 (81)8版本历史 (82)表目录表1. 选型列表 (1)表2. AT32F415系列器件功能和配置 (11)表3. 启动加载程序(Bootloader)的管脚配置 (17)表4. 定时器功能比较 (19)表5. AT32F415系列引脚定义 (27)表6. 电压特性 (33)表7. 电流特性 (33)表8. 温度特性 (33)表9. 通用工作条件 (34)表10. 上电和掉电时的工作条件 (34)表11. 内嵌复位和电源控制模块特性 (35)表12. 内置的参照电压 (36)表13. 运行模式下的最大电流消耗 (37)表14. 睡眠模式下的最大电流消耗 (38)表15. 停机和待机模式下的典型和最大电流消耗 (38)表16. V BAT的典型和最大电流消耗(LSE和ERTC开启) (40)表17. 运行模式下的典型电流消耗 (41)表18. 睡眠模式下的典型电流消耗 (42)表19. 内置外设的电流消耗 (43)表20. 高速外部用户时钟特性 (44)表21. 低速外部用户时钟特性 (45)表22. HSE 4~25 MHz振荡器特性 (46)表23. LSE振荡器特性(f LSE = 32.768 kHz) (47)表24. HSI振荡器特性 (48)表25. LSI振荡器特性 (48)表26. 低功耗模式的唤醒时间 (49)表27. PLL特性 (50)表28. 闪存存储器特性 (50)表29. 闪存存储器寿命和数据保存期限 (50)表30. EMS特性 (51)表31. ESD绝对最大值 (52)表32. 电气敏感性 (52)表33. I/O静态特性 (53)表34. 输出电压特性 (54)表35. 输入交流特性 (54)表36. NRST引脚特性 (55)表37. TMRx特性 (55)表38. I2C接口特性 (56)表39. SCL频率(f PCLK1 = 36 MHz,V DD = 3.3 V) (57)表40. SPI特性 (58)表41. I2S特性 (60)表42. SD/MMC接口特性 (62)表43. USB OTG全速启动时间 (63)表44. USB OTG全速直流特性 (63)表45. USB OTG全速电气特性 (63)表46. ADC特性 (64)表47. f ADC = 14MHz时的最大R AIN (65)表48. f ADC = 28MHz时的最大R AIN (65)表49. ADC精度(V DDA = 3.0~3.6 V, T A = 25 °C) (66)表50. ADC精度(V DDA = 2.6~3.6 V, T A = -40~105 °C) (66)表51. 比较器特性 (68)表52. 温度传感器特性 (69)表53. LQFP64 – 10 x 10 mm 64脚薄型正方扁平封装机械数据 (71)表54. LQFP64 – 7 x 7 mm 64脚薄型正方扁平封装机械数据 (73)表55. LQFP48 – 7 x 7 mm 48脚薄型正方扁平封装机械数据 (75)表56. QFN48 – 6 x 6 mm 48脚正方扁平无引线封装机械数据 (77)表57. QFN32 – 4 x 4 mm 32脚正方扁平无引线封装机械数据 (79)表58. 封装的热特性 (80)表59. AT32F415系列订货代码信息图示 (81)表60. 文档版本历史 (82)图目录图1. AT32F415系列功能框图 (13)图2. 时钟树 (16)图3. AT32F415系列LQFP64引脚分布 (24)图4. AT32F415系列LQFP48引脚分布 (25)图5. AT32F413系列QFN48引脚分布 (25)图6. AT32F415系列QFN32引脚分布 (26)图7. 存储器图 (30)图8.引脚的负载条件 (31)图9. 引脚输入电压 (31)图10. 供电方案 (32)图11. 电流消耗测量方案 (32)图12. 上电复位和掉电复位波形图 (35)图13.调压器在运行模式时,停机模式下的典型电流消耗在不同的V DD时与温度的对比 (39)图14.调压器在低功耗模式时,停机模式下的典型电流消耗在不同的V DD时与温度的对比 (39)图15. 待机模式下的典型电流消耗在不同的V DD时与温度的对比 (40)图16. V BAT的典型电流消耗(LSE和ERTC开启)在不同的V BAT电压时与温度的对比 (40)图17. 外部高速时钟源的交流时序图 (44)图18. 外部低速时钟源的交流时序图 (45)图19. 使用8 MHz晶体的典型应用 (46)图20. 使用32.768 kHz晶体的典型应用 (47)图21. HSI振荡器精度与温度的对比 (48)图22. 建议的NRST引脚保护 (55)图23. I2C总线交流波形和测量电路 (57)图24. SPI时序图–从模式和CPHA = 0 (59)图25. SPI时序图–从模式和CPHA = 1 (59)图26. SPI时序图–主模式 (59)图27. I2S从模式时序图(Philips协议) (60)图28. I2S主模式时序图(Philips协议) (61)图29. SDIO高速模式 (62)图30. SD默认模式 (62)图31. USB OTG全速时序:数据信号上升和下降时间定义 (63)图32. ADC精度特性 (66)图33. 使用ADC典型的连接图 (67)图34. 供电电源和参考电源去藕线路 (67)图35. 比较器迟滞图 (68)图36. V SENSE对温度理想曲线图 (69)图37. LQFP64 – 10 x 10 mm 64脚薄型正方扁平封装图 (70)图38. LQFP64 – 10 x 10 mm标记(封装俯视图) (71)图39. LQFP64 – 7 x 7 mm 64脚薄型正方扁平封装图 (72)图40. LQFP64 – 7 x 7 mm标记(封装俯视图) (73)图41. LQFP48 – 7 x 7 mm 48脚薄型正方扁平封装图 (74)图42. LQFP48 – 7 x 7 mm标记(封装俯视图) (75)图43. QFN48 – 6 x 6 mm 48脚正方扁平无引线封装图 (76)图44. QFN48 – 6 x 6 mm标记(封装俯视图) (77)图45. QFN32 – 4 x 4 mm 32脚正方扁平无引线封装图 (78)图46. QFN32 – 4 x 4 mm标记(封装俯视图) (79)1 介绍本文给出了AT32F415系列产品的订购信息和器件的机械特性。
AT300 用户手册说明书

AT300用户手册GNSS单频多模高精度定位定向模块特点•单频多模BDS/GPS/QZSS•双天线高精度定向•GNSS/INS传感器组合•毫米级载波相位观测值•低成本、低功耗、小型化版本:1.3.0日期:2019.06.05杭州中科微电子有限公司杭州市滨江区江南大道3850号创新大厦10楼电话:0571-********传真:0571-********网站:目录目录 (1)1. 简介 (4)1.1 概述 (4)1.2 性能指标 (5)1.3 应用领域 (6)2. 功能说明 (7)2.1 全面的多卫星导航系统 (7)2.2 绝对单点定位 (7)2.3 实时高精度定向 (7)2.7 输出协议 (7)2.9 天线 (7)2.10 评估软件 (7)3. 安装与使用 (8)3.1 坐标系简介 (8)3.1.1 大地坐标系(LLA) (8)3.1.2 模块坐标系(XYZ) (8)3.1.3 站心坐标系(ENU) (9)3.1.4 AT300输出与坐标系关系 (9)3.2 天线的安装 (10)3.2.1 基线长度与航向角精度 (10)3.2.2 基线长度的测量 (10)3.3 输出角度示意 (11)3.3.1 航向角(yaw) (11)3.3.2 倾斜角(pitch) (11)3.3.3 横滚角(roll) (12)3.3.4 输出角度模式配置 (12)3.3.5 航向角输出配置 (12)3.3.5 横滚角输出配置 (13)3.4 AT300快速使用 (16)3.4.1 标准安装 (16)3.4.2 反向安装1 (16)3.4.3 反向安装2 (17)3.4.4 分离安装 (18)4. NMEA-0183协议 (19)4.1 NMEA协议简介 (19)4.1.1 NMEA协议特征 (19)4.1.2 NMEA协议框架 (19)4.2 AT300中的NMEA扩展协议 (20)4.2.1 GGA (21)4.2.2 GLL (22)4.2.3 GSA (23)4.2.4 GSV (24)4.2.5 RMC (25)4.2.6 VTG (26)4.2.7 ZDA (27)4.2.8 HDT(已废弃) (28)4.2.9 THS (29)4.2.10 ROT (30)4.2.11 TXT (31)4.2.12 PCAS00 (32)4.2.13 PCAS01 (33)4.2.14 PCAS02 (34)4.2.15 PCAS03 (35)4.2.16 PCAS04 (36)4.2.17 PCAS05 (37)4.2.18 PCAS06 (38)4.2.19 PCAS07 (39)4.2.20 PCAS08 (40)4.2.21 PCAS09 (41)4.2.22 PCAS10 (42)4.2.23 PCAS16 (43)4.2.24 PCAS17 (44)4.2.25 PCAS20 (45)4.2.26 PCAS50 (46)5. CASIC协议 (47)5.1 CASIC协议简介 (47)5.1.1 CASIC协议特征 (47)5.1.2 CASIC协议框架 (47)5.1.3 CASIC协议数据类型 (48)5.2 AT300中的CASIC消息 (49)5.2.1 NAV-RCVSV (0x01 0x23) (50)5.2.2 NAV-ATT (0x01 0x30) (51)5.2.3 ACK-NACK (0x05 0x00) (52)5.2.4 ACK-ACK (0x05 0x01) (52)5.2.5 CFG-PRT (0x06 0x00) (53)5.2.6 CFG-MSG (0x06 0x01) (54)5.2.7 CFG-RST (0x06 0x02) (55)5.2.8 CFG-CFG (0x06 0x05) (56)5.2.9 CFG-ATT (0x06 0x30) (57)6. RTCM协议 (59)6.1 RTCM 3 (59)6.2 支持的语句 (59)6.3 配置 (59)7. 技术描述 (60)7.1 管脚定义 (60)7.2 PCB layout (62)7.3 电气参数 (63)7.3.1 极限参数 (63)7.3.2 运行条件 (63)7.4 模块应用电路 (63)7.4.1 从管脚输入卫星信号 (64)7.4.2 从IPEX接口输入卫星信号 (64)7.5 其它注意事项 (65)8. 可靠性测试与认证 (66)8.1 RoHS认证 (66)8.2 IOS9000标准 (66)9. 模块包装与存储 (67)9.1 模块包装 (67)9.2 防潮等级 (67)9.3 回流焊曲线 (67)9.4 静电防护 (68)10. 标签与下单型号 (69)10.1 模块标签 (69)10.2 命名规则 (69)10.3 产品型号 (69)11. 参考文献 (70)12. 版本历史 (71)联系方式 (72)AT300用户手册1. 简介该用户手册介绍杭州中科微电子有限公司的AT300系列GNSS单频多模高精度定位定向产品。
AT2020USBi 心型指向性 USB电容话筒 说明书
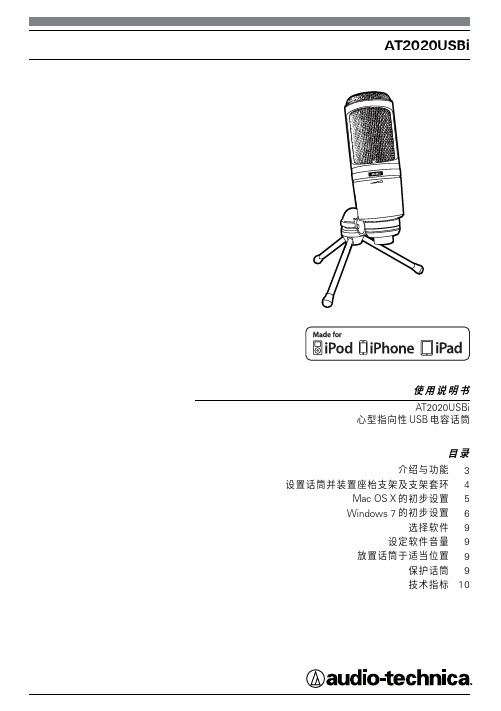
音量控制 : 话筒增益控制
重量 : 350 g
大小 : 162.0 mm 长,52.0 mm 机 体 最 大 直 径
输 出连接头 : Micro HDMI 接 头
随 机附件 : ⅝"-27 接头转轴式 支 架 套 环 ; ⅝"-27 至 ⅜"-16 螺 纹 转 接 头 ; 保 护 袋 ; 三脚桌面支架; 1.5m 长 USB 连 线 ;1.5m 长 Lightning 连 线
iPad 或 iPhone 6 . USB 连接线 7. Lightning 连接线
以附设的转轴支架套环和三脚桌面支架设置您的话筒 A. 把转轴支架套环旋扭固定到三脚桌面支架的顶部 B. 把三脚桌面支架放置在一个平滑的平面位置(三脚架的座架应拉开以提供一个宽阔而安全
的底部) C . 把 AT2020USBi 话 筒 插 入 安 装 到 转 轴 支 架 套 环 的 螺 纹 套 筒 的 枢 轴 中, 并 把 话 筒 紧 锁。 话 筒 前
3. 开始菜单 > 控制面板 > 声音 要 选择 AT2020USBi 作为 默 认 的 录 音 设 备 , 首 先 在“ 开 始 ”菜 单 中 选 择“ 控 制 面 板 ”。
6
4 . 选 择“声音”。
Windows 8 的 初 步 设 置 ( 继续 )
5. 下面的视窗将会弹出:
AT512说明书 RevB

2
安全
警告
危险:当你发现有以下不正常情形发生,请立即终止操作并断开电源线。立刻与安柏科
仪器操作异常。 操作中仪器产生反常噪音、异味、烟或闪光。 操作过程中,仪器产生高温或电击。 电源线、电源开关或电源插座损坏。 杂质或液体流入仪器。
技销售部联系维修。否则将会引起火灾或对操作者有潜在的触电危险。
3
AT512 使用说明书
警告
危险:
为避免可能的电击和人身安全,请遵循以下指南进行操作。 用户在开始使用仪器前请仔细阅读以下安全信息,对于用户由于未遵守下 列条款而造成的人身安全和财产损失,安柏科技将不承担任何责任。 为防止电击危险,请连接好电源地线 不可在易燃易爆气体、蒸汽或多灰尘的环境使用仪器。在此类环境使用任 何电子设备,都是对人身安全的冒险。 非专业维护人员不可打开仪器外壳,以试图维修仪器。仪器在关机后一段 时间内仍存在未释放干净的电荷,这可能对人身造成电击危险。 如果仪器已经损害,其危险将不可预知。请断开电源线,不可再使用,也 不要试图自行维修。 如果仪器工作不正常,其危险不可预知,请断开电源线,不可再使用,也 不要试图自行维修。 超出范围,仪器标志和文字是常州安柏科技有限公司已经或正在申请的商标。 4
AT512 精密电阻测试仪
Operation Manual
简体中文版
Simplified Chinese
2011 第二版
@%
5
AT512 使用说明书
常州安柏科技有限公司(以下简称 Applent)保证您购买的每一台 AT512 在质量和计量上都是完全合 格的。此项保证不包括保险丝以及因疏忽、误用、污染、意外或非正常状况使用造成的损坏。本项保证仅 适用于原购买者,并且不可转让。 自发货之日起,Applent 提供玖拾(90)天保换和贰年免费保修,此保证也包括 VFD 或 LCD。玖拾天 保换期内由于使用者操作不当引起的损坏,保换条款终止。贰年包修期内由于使用者操作不当而引起仪器 损坏,维修费用由用户承担。贰年后直到仪表终生,Applent 将以收费方式提供维修。对于 VFD 或 LCD 的 更换,其费用以当前成本价格收取。 如发现产品损坏,请和 Applent 取得联系以取得同意退回或更换的信息。之后请将此产品送销售商进 行退换。请务必说明产品损坏原因,并且预付邮资和到目的地的保险费。对保修期内产品的维修或更换, Applent 将负责回邮的运输费用。对非保修产品的修理,Applent 将针对维修费用进行估价,在取得您的同 意的前提下才进行维修,由维修所产生的一切费用将由用户承担,包括回邮的运输费用。 本项保证是 Applent 提供唯一保证,也是对您唯一的补偿,除此之外没有任何明示或暗示的保证(包 括保证某一特殊目的的适应性) ,亦明确否认所有其他的保证。Applent 或其他代理商并没有任何口头或书 面的表示,用以建立一项保证或以任何方式扩大本保证的范围。凡因对在规格范围外的任何原因而引起的 特别、间接、附带或继起的损坏、损失(包括资料的损失) ,Applent 将一概不予负责。如果其中某条款与 当地法规相抵触或由于某些司法不允许暗示性保证的排除或限制,以当地法规为主,因此该条款可能不适 用于您。但该条款的裁定不影响其他条款的有效性和可执行性。 中华人民共和国 江苏省 常州安柏科技有限公司 二〇〇五年元月
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动变速箱使用说明
一、中华轿车(2.0 AT)上所使用的变速箱是由日本三菱汽车生产的F4A4自动变速箱,此自动变速器有四级变速,即一档、二档、三档、四档,变速器会根据车速、节气门开度等参数进行自动换档,使车能够在最佳状态行驶。
在变速器操纵杆上面有“P”、“R”、“N”、“D”、“3”、“2”、“1”七个指示位置,现对自动变速器的七个位置具体说明如下:
1)停车档(P)——当换档操纵杆放在位置“P”时,仪表上的“P”档指示灯亮,表示此时为停车状态。
停车档是利用机械锁定变速器,当您关闭或启动发动机时需使用此档。
在点火开关开着时,变速器操纵杆在“P”的位置是自锁,从此档转换到其他档位时,必须踩下制动踏板,同时按压变速杆侧边的释放按钮进行换档。
2)倒车档(R)——当换档操纵杆放在位置“R”时,仪表上的“R”档指示灯亮,表示此时为倒车状态。
从停车档换到倒车档的操作请参阅(停车档)说明。
从“R”档换到“P”档需按下变速杆侧边的释放按钮,换到其它档位只需直接拨动变速杆即可。
3)空挡(N)——当换档操纵杆放在位置“N”时,仪表上的“N”档指示灯亮,表示此时为空挡状态。
如果您想重新启动已经停下来的发动机,或者让正在空转的发动机停下来休息一下,请使用空挡。
无论在任何情况,只要您想离开车子,请使用停车档。
当您从空挡换到倒车档需按下变速杆侧边的释放按钮,同时还要注意要等汽车完全停下来之后再换档,否则会容易损坏您的变速器;从“N”档换到“D”
档时,请踏下制动踏板,无需按下变速杆上的释放按钮。
4)自动超速档(D)——当换档操纵杆放在位置“D”时,仪表上的“D”档指示灯亮,表示此时为自动超速档状态。
正常驾驶时,请使用此档位。
自动变速器会为您选择一个适当的档位以保证车速及汽车加速为最佳状态。
当发动机冷机时,变速器会变到较高的档位,以帮助发动机温度迅速上升。
5)三档(3)——当换档操纵杆放在位置“3”时,仪表上的“3”档指示灯亮,这个档位与自动超速档(D)相似。
在下坡和车速起伏较大的驾驶过程中使用此档位,而不适合用自动超速档(D),此时车能到达的最高档位为“3”档。
6)二档(2)——当换档操纵杆放在位置“2”时,仪表上的“2”档指示灯亮。
这个档位和三档相比较,比三档有更大的动力,但燃油经济性较差。
在坡路行驶时,可使用此档位,此时车能到达的最高档位为“2”档
7)一档(1)——当换档操纵杆放在位置“1”时,仪表上的“1”档指示灯亮。
这个档位和二档相比较,比二档有更大的动力,但燃油经济性最差。
您可以使用此档位在非常陡峭的山坡上或深雪、泥泞路上行驶,此时车的档位为“1”档。
注意事项:
a 只能在变速杆位置“P”或“N”上时,才能启动发动机
b 为了防止汽车不经意的行驶,在汽车停止以后,需要牢固的拉动
手制动器,同时还要把变速杆放在位置“P”上。
c 无法通过推车、拉车后挂档启动发动机
d 禁止长时间空挡滑行
在您遇到以下情况时:
1)不换档;2)换档过程中冲击;表明变速器或线路可能存在问题,请尽快与中华轿车服务站联系,检修您的自动变速器。
二、中华轿车(2.4 AT)上所使用的变速箱是由日本三菱汽车生产的F4A4自动变速箱,此自动变速器有四级变速,即一档、二档、三档、四档,变速器会根据车速、节气门开度等参数进行自动换档,使车能够在最佳状态行驶。
在变速器操纵杆上面有“P”、“R”、“N”、“D”、“+”、“-”六个指示位置,如下图所示:
现对自动变速器的六个位置具体说明如下:
1)停车档(P)——当换档操纵杆放在位置“P”时,仪表上的“P”档指示灯亮,表示此时为停车状态。
停车档是利用机械锁定变速器,当您关闭或启动发动机时需使用此档。
在点火开关开着时,变速器操
纵杆在“P”的位置是自锁,从此档转换到其他档位时,必须踩下制动踏板,同时按压变速杆侧边的释放按钮进行换档。
2)倒车档(R)——当换档操纵杆放在位置“R”时,仪表上的“R”档指示灯亮,表示此时为倒车状态。
从停车档换到倒车档的操作请参阅(停车档)说明。
从“R”档换到“P”档需按下变速杆侧边的释放按钮,换到其它档位只需直接拨动变速杆即可。
3)空挡(N)——当换档操纵杆放在位置“N”时,仪表上的“N”档指示灯亮,表示此时为空挡状态。
如果您想重新启动已经停下来的发动机,或者让正在空转的发动机停下来休息一下,请使用空挡。
无论在任何情况,只要您想离开车子,请使用停车档。
当您从空挡换到倒车档需按下变速杆侧边的释放按钮,同时还要注意要等汽车完全停下来之后再换档,否则会容易损坏您的变速器;从“N”档换到“D”档时,请踏下制动踏板,无需按下变速杆上的释放按钮。
4)自动超速档(D)——当换档操纵杆放在位置“D”时,仪表上的“D”档指示灯亮,表示此时为自动超速档状态。
正常驾驶时,请使用此档位。
自动变速器会为您选择一个适当的档位以保证车速及汽车加速为最佳状态。
当发动机冷却时,变速器会变到较高的档位,以帮助发动机温度迅速上升。
直接拨动变速操纵杆向上可到“N”档,向右可进入手动驾驶模式。
5)增档“+”——停车时换档操纵杆拨动到右侧,为手动驾驶模式,此时仪表板上显示的档位为“1”;行驶时,显示为该时的档位。
当换档操纵杆每向上,即向“+”的位置推动一下,增加一个档位,同时
仪表上会显示相应的档位。
当汽车在静止时,只能在1、2档之间切换。
此时要注意以下几点:
Ⅰ、当车速≤14Km/h时,汽车应在1档行驶,无法通过手动换档增加到2档
Ⅱ、当车速≤30Km/h时,汽车应在2档以下行驶,无法通过手动换档增加到3档
Ⅲ、当车速≤50Km/h时,汽车应在3档以下行驶,无法通过手动换档增加到4档。
6)减档“-”——换档操纵杆放到右侧,此时为手动驾驶模式,此时仪表板上显示的档位为“1”。
当车在二档以上的档位行驶时,换档操纵杆每向下,即向“-”的位置推动一下,减小一个档位,同时仪表上会显示相应的档位。
此时要注意以下几点:
Ⅰ、当车速≥168Km/h时,汽车应在4档行驶,此时无法通过手动减档降到3档
Ⅱ、当车速≥108Km/h时,汽车应在3档以上行驶,此时无法通过手动减档降到2档
Ⅲ、当车速≥45Km/h时,汽车应在2档以上行驶,此时无法通过手动减档降到1档
根据阁下的驾驶习惯和驾驶经验,选择合适的换档时机能够使驾乘舒适,否则会产生与驾驶手动档车相同的问题,发动机转速过高和降档拖车(发动机制动,等同于猛踩制动的感觉)。
注意事项:
a 只能在变速杆位置“P”或“N”上时,才能启动发动机
b 为了防止汽车不经意的行驶,在汽车停止以后,需要牢固的拉动
手制动器,同时还要把变速杆放在位置“P”上。
c 无法通过推车、拉车后挂档启动发动机
d 禁止长时间空挡滑行
在您遇到以下情况时:
1)不换档;2)换档过程中冲击;
表明变速器或线路可能存在问题,请尽快与中华轿车服务站联系,检修您的自动变速器。