计控实验四最少拍控制算法研究
计算机控制系统 第四章 最小拍控制与纯滞后补偿

Z
根据题意,输入信号为单位速度输入,即r (t ) = t ,则有:
Φ e ( z ) = (1 − z −1 ) 2
代入式(4-12)求出最小拍控制器为
5.435(1 − 0.5 z −1 )(1 − 0.368z −1 ) D( z ) = (1 − z −1 )(1 + 0.718z −1 )
s ( 0 .5 s + 1)
位速度输入时的最小拍控制器。 解:根据图4-1可求出系统广义被控对象脉冲传递函数
1 − e −Ts 2 ] G( z) = Z[ ⋅ s s (0.5s + 1) 4 = Z [(1 − e −Ts ) 2 ] s ( s + 2) 4 4e −Ts = Z[ 2 ] − Z[ 2 ] s ( s + 2) s ( s + 2) 2 1 1 2 1 1 = Z[ 2 − + ] − Z [e −Ts ( 2 − + )] s s s+2 s s s+2 e − 2T z −1 (1 − z −1 + e 2T z −1 ) = (1 − z −1 )(1 − e − 2T z −1 )
对最小拍控制系统设计的要求是: (1)调节时间最短,即系统跟踪输入信号所需的采样周期数 最少; (2)在采样点处无静差,即对特定的参考输入信号,在达到 稳态后,系统在采样点能精确实现对输入信号的跟踪; (3)设计出来的数字控制器必须是物理上可以实现的; (4)闭环系统必须是稳定的。
一、最小拍闭环脉冲传递函数的确定 首先根据对控制系统性能指标的要求和其他约束条件, Φ (z 构造系统的闭环脉冲传递函数 。) 最小拍控制系统的设计要求是对特定的参考输入信号, 在系统达到稳态后,系统在采样点处静差为零。根据此约束条 件可以构造出系统的误差脉冲传递函数 Φ e (z )。典型计算机控制 系统结构图如图4-1所示。
计算机控制最小拍实验报告

重庆邮电大学自动化学院计算机控制实验报告学院:自动化学生姓名:魏波专业:电气工程与自动化班级:0830903学号:2009212715最小拍控制系统一、实验目的1、掌握最小拍有纹波控制系统的设计方法。
2、掌握最小拍无纹波控制系统的设计方法。
二、实验设备PC机一台,TD-ACC实验系统一套,i386EX系统板一块三、实验原理及内容典型的最小拍控制系统如图其中D(Z) 为数字调节器, G(Z)为包括零阶保持器在内的广义对象的Z传递函数,Φ (Z)为闭环 Z传递函数, C(Z) 为输出信号的Z传递函数, R(Z) 为输入信号的 Z传递函数。
R为输入, C为输出,计算机对误差E 定时采样按 D(Z) 计算输出控制量 U(Z) 。
图中 K=5。
闭环传递函数1、最小拍有纹波系统设计2、最小拍无纹波设计有纹波系统虽然在采样点上的误差为零,但不能保证采样点之间的误差值为零,因此存在有纹波现象。
无纹波系统设计只要使U(Z)是Z1的有限多项式,则可以保证系统输出无纹波。
四、实验线路图(2)D(Z) 算法采样周期 T=1S,E(Z) 为计算机输入, U(Z) 为输出,有:D(Z)=U(Z)E(Z)=K0 K1Z 1K2Z2K3Z31 P1Z1P2Z 2P3Z 3式中 Ki 与 Pi 取值范围: -0.9999 ~0.9999 ,计算机分别用相邻三个字节存储其 BCD码。
最低字节符号, 00H 为正, 01H为负。
中间字节存前 2 位小数,最高字节存末 2 位小数。
例有系数 0.1234 ,则内存为:地址内容2F00H00H2F01H12H2F02H34H系数存储安排如表5— 1。
表 5—10101H010DH0102H K0010EH P 0103H010FH0104H0110H0105H K10111H P 0106H0112H0107H0113H0108H K20114H P 0109H0115H010AH010BH K3010CH 1 2 3将 D(Z) 式写成差分方程,则有:U K=K0 E K+K1E K-1+K2E K-2+K3 E K-3-P 1U K-1-P2U K-2-P3 U K-3式中 E K~E K-3,误差输入; U K~U K-3,计算机输出。
最小拍控制系统
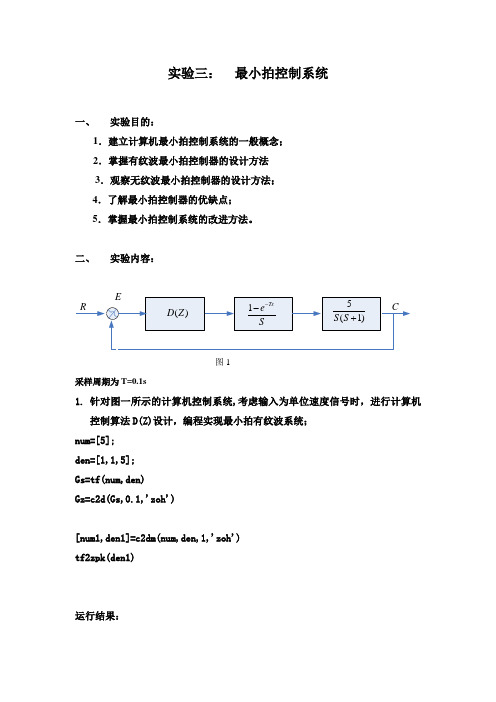
实验三:最小拍控制系统一、实验目的:1.建立计算机最小拍控制系统的一般概念;2.掌握有纹波最小拍控制器的设计方法3.观察无纹波最小拍控制器的设计方法;4.了解最小拍控制器的优缺点;5.掌握最小拍控制系统的改进方法。
二、实验内容:图1采样周期为T=0.1s1.针对图一所示的计算机控制系统,考虑输入为单位速度信号时,进行计算机控制算法D(Z)设计,编程实现最小拍有纹波系统;num=[5];den=[1,1,5];Gs=tf(num,den)Gz=c2d(Gs,0.1,'zoh')[num1,den1]=c2dm(num,den,1,'zoh')tf2zpk(den1)运行结果:Transfer function:5-----------s^2 + s + 5Transfer function:0.02409 z + 0.0233----------------------z^2 - 1.857 z + 0.9048 Sampling time: 0.1num1 =0 1.2326 0.8288 den1 =1.0000 0.6936 0.3679 ans =-0.3468 + 0.4976i-0.3468 - 0.4976i2.讨论纹波的生成原因,编程实现最小拍有纹波系统;Ts=0.1;Q=2; a=0.5;num=[5];den=[1,1,5];Gs=tf(num,den)Gz=c2d(Gs,0.1,'zoh')z1=tf([1],[1,0],0.1);Qz=1.267*z1*(1+0.9669*z1)*(1-0.598*z1)/(1-a*z1); Qe=1-Qz;Dz=Qz/[Qe*Gz];Qz1=minreal(Dz*Gz/(1+Dz*Gz));t=0:0.1:Q;u=t;plot(0:0.1:Q,u,'r*');hold onyt=lsim(Qz1,u,t,0);plot(0:0.1:Q,yt);3.讨论最小拍系统的特点,采取惯性因子法对最小拍控制器加以改进,并研究惯性因子对系统性能的影响。
计控实验四--最小拍系统设计
计控实验四--最小拍系统设计实验报告||实验名称最小拍系统设计实验课程名称计算机控制技术与系统||实验四 最少拍系统设计实验1、实验目的掌握最少拍系统的设计方法。
2、实验原理框图)(z HG3、实验要求设被控对象为要求:(1)采样时间T=1s ,采用零阶保持器,使用Matlab 求取出广义对象的z 传递函数; (2)设计单位阶跃输入下的最少拍控制器D(z),给出设计过程; (3)控制系统仿真结果及分析(系统是否稳定?有无纹波?几步跟踪?); (4)仿真系统对输入信号(斜坡、单位加速度)的灵敏性,观察系统性能变化。
4、实验过程4.1使用Matlab 求取Z 传函利用matlab 语句求取广义对象的Z 传递函数并将其转换为零极点形式,用到的程序如下: T=1; z0=[]; p0=[0 0 -1.252]; k0=2.1;G0=zpk(z0,p0,k0); sysd=c2d(G0,T,'zoh')得到的广义对象的z 传递函数为20.26304(z 2.827)(z 0.19)(z 1)(z 0.2859)++--1,)252.1(1.2)(20=+=T s s s G4.2单位阶跃输入下,理想最小拍系统的设计与仿真典型的输入函数为11(z )(z),q 1,2,3(1z )qA R --==-设闭环脉冲传递函数为(z)Φ,误差表达式设为(z)e Φ,数字控制器为D(z)。
则依据理想最小拍系统的设计原则有11(z)D(z),(z)(1z )(z)(z)1(z)p e F G -Φ=Φ=--Φ,(z)1(z),p q e Φ=-Φ=其中p 表示系统稳定所需要的拍数。
若要使数字控制器形势最简单,阶次最低,取F(z)=1,则11(z)1(z)(1z ),(z)1(1z )p p e --Φ=-Φ=-Φ=--单位阶跃输入r(t)=1对应的z 传递函数为11(z)(1z )R -=-单位阶跃输入对应的q=1,则p=1。
实验四 最少拍控制算法研究(给学生)
实验四 最少拍控制算法研究一、实验目的1.学习并熟悉最少拍控制器的设计和算法; 2.研究最少拍控制系统输出采样点间纹波的形成; 3.熟悉最少拍无纹波控制系统控制器的设计和实现方法。
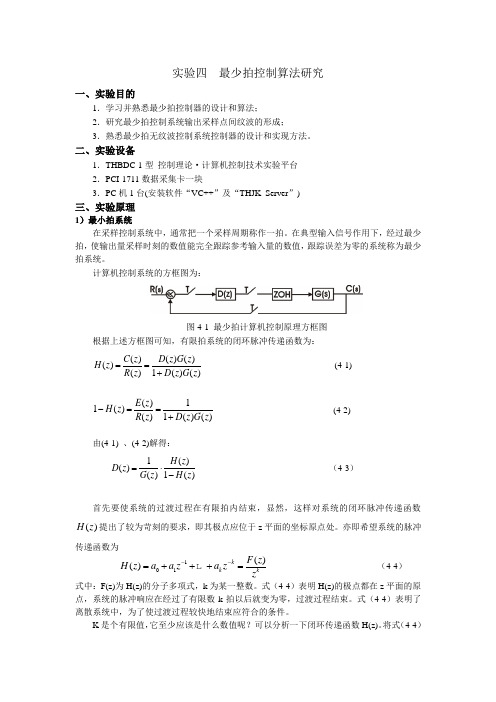
二、实验设备1.THBDC-1型 控制理论·计算机控制技术实验平台 2.PCI-1711数据采集卡一块3.PC 机1台(安装软件“VC++”及“THJK_Server ”)三、实验原理1)最小拍系统在采样控制系统中,通常把一个采样周期称作一拍。
在典型输入信号作用下,经过最少拍,使输出量采样时刻的数值能完全跟踪参考输入量的数值,跟踪误差为零的系统称为最少拍系统。
计算机控制系统的方框图为:图4-1 最少拍计算机控制原理方框图根据上述方框图可知,有限拍系统的闭环脉冲传递函数为:)()(1)()()()()(z G z D z G z D z R z C z H +==(4-1) )()(11)()()(1z G z D z R z E z H +==- (4-2) 由(4-1) 、(4-2)解得: )(1)()(1)(z H z H z G z D -⋅= (4-3)首先要使系统的过渡过程在有限拍内结束,显然,这样对系统的闭环脉冲传递函数)(z H 提出了较为苛刻的要求,即其极点应位于z 平面的坐标原点处。
亦即希望系统的脉冲传递函数为101()()k k kF z H z a a z a z z --=+++=(4-4) 式中:F(z)为H(z)的分子多项式,k 为某一整数。
式(4-4)表明H(z)的极点都在z 平面的原点,系统的脉冲响应在经过了有限数k 拍以后就变为零,过渡过程结束。
式(4-4)表明了离散系统中,为了使过渡过程较快地结束应符合的条件。
K 是个有限值,它至少应该是什么数值呢?可以分析一下闭环传递函数H(z)。
将式(4-4)代入D(z)表示式,得)]([)()(1)(1)()(1)(z F z z F z G z H z H z G z D k-⋅=-⋅=(4-5) 如果m 和n 分别为对象和保持器的组合脉冲传递函数G(z)的分子和分母的阶次,l 为式(4-5)中F(z)的阶次,要使D(z)能实现,就应使分母的阶次大于分子的阶次k n m l ≥-+ (4-6)由式(4-6)可见,当0l =时,H(z)的分子0()F z F ==常数,暂态响应的持续节拍数最少。
计控 例

【例4-1】 设最小拍控制系统如图4-11所示,被控对象的传递函数2()(0.51)G s s s =+,采样周期0.5T s =,试设计在单位速度输入时的最小拍控制器()D z 。
解:系统的广义被控对象脉冲传递函数为 12211211112111122()[](1)[](0.51)(0.51)(1)0.368(10.718)(1)(1)(1)(10.368)TsTTTe G z Z z Z ss s s s e z z ez z z z e z z z --------------==-++-++==----根据题意,输入信号为单位速度输入,即()r t t =,则有12()(1)e z z -Φ=-代入 求出最小拍控制器为11115.435(10.5)(10.368)()(1)(10.718)z z D z z z ------=-+下面对设计出来的最小拍控制器进行分析和校验。
系统的闭环脉冲传递函数为12()2z z z --Φ=-,当输入为单位速度信号时,系统输出序列的z 变换为11212234()()()(2)(1)234TzY z R z z z zz TzTzTz-------=Φ=--=+++即(0)0,(1)0,(2)2,(3)3,y y y T y T ==== 。
输出响应如图4-12所示。
从图中可以看出,当系统为单位速度输入时,经过两拍以后,输出量完全跟踪输入采样值,即()()y k r k =。
但在各采样点之间还是存在一定的误差,即存在一定纹波。
图4-12 单位速度输入时最少拍控制系统输出响应曲线当输入为单位阶跃信号时,系统输出序列的z 变换为12111111()()()(2)21Y z R z z zzzzzzz-------=Φ=-=++++-即(0)0,(1)2,(2)(3)(4)1,y y y y y ===== 。
其输出响应曲线如图4-13所示。
从由图可见,按单位速度输入所设计的最小拍系统,当输入变为单位阶跃信号时,经过两个采样周期,()()y k r k =。
最小拍控制详解
三拍。
Y( z) ? T 2 (0 ?z0 ? 0 ?z? 1 ? 3z? 2 ? 9z? 3 ? 16z? 4 ? ?
2
2020/1/31
10
2)G(z) 为不稳定对象且包含圆外零点
? ? (z)必须包含G(z)中全部圆外零点;
? ? e (z) 必须包含 G(z) 中全部圆外圆上极点;
? ? e (z) 至少应包含 q 个(1 ? z?1 )因子;
(1 ? z ?1 ) 因式的关于 z? 1 的多项式。
误差传递函数的结构为 ? e (z) ? (1 ? z?1 )M F (z)
2020/1/31
6
取 m(z ? 1)?
z? 1
e (z)R(z) ?
? lim?(1 ? z? 1 ?
z?1 )(1 ?
z?1 )M
2020/1/31
13
例1 被控对象的传递函数为
2.1 G0 (s) ? s2 ( s ? 1.252)
经采样(T=l)和零阶保持,试求其对于单位阶跃输入的最
少拍控制器。
解:(1)广义被控对象 G(z)
G(z) ?
Z
?1 ? ?
?
e s
?
Ts
2.1 ?
?s2
(s
?
1.252)
? ?
?
0.265z? 1(1 ? 2.78z?1 )(1 ? 0.2z? 1 ) (1 ? z? 1 )2 (1 ? 0.286z?1 )
广义被控对象零极点的分布:
圆外极点 无 ,
i? 0
圆外零点 p1 ? ? 2.78 , j ? 1
延时因子 z?1
r?1
2020输/1/3入1 函数的阶次
实验四-最少拍控制系统设计
实验四 最少拍控制系统设计姓名 学号 班级一、 实验目的1) 通过本实验,熟悉最少拍控制系统的设计方法。
2) 学习基于Matlab/Simulink 的最少拍控制系统的仿真研究方法。
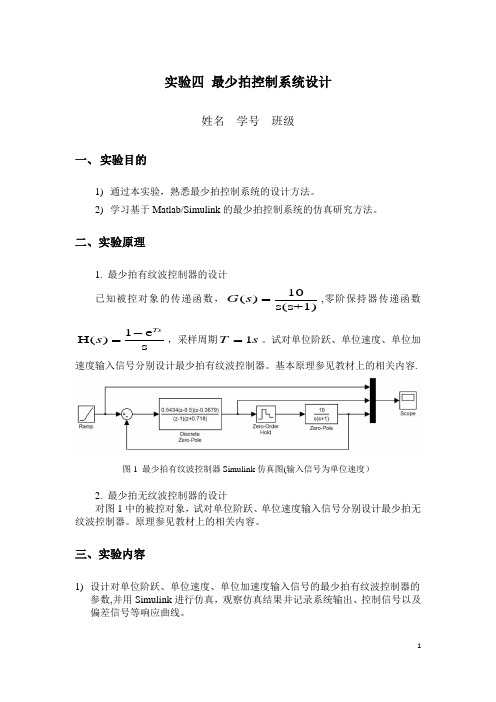
二、实验原理1. 最少拍有纹波控制器的设计 已知被控对象的传递函数,10()s(s+1)G s =,零阶保持器传递函数1e H()sTss -=,采样周期1T s =。
试对单位阶跃、单位速度、单位加速度输入信号分别设计最少拍有纹波控制器。
基本原理参见教材上的相关内容.图1 最少拍有纹波控制器Simulink 仿真图(输入信号为单位速度)2. 最少拍无纹波控制器的设计对图1中的被控对象,试对单位阶跃、单位速度输入信号分别设计最少拍无纹波控制器。
原理参见教材上的相关内容。
三、实验内容1) 设计对单位阶跃、单位速度、单位加速度输入信号的最少拍有纹波控制器的参数,并用Simulink 进行仿真,观察仿真结果并记录系统输出、控制信号以及偏差信号等响应曲线。
根据题意有:有纹波设计如下单位阶跃输入时:响应:单位速度输入时:响应:2)设计对单位阶跃、单位速度输入信号的最少拍无纹波控制器的参数,并用Simulink进行仿真,观察仿真结果并记录系统输出、控制信号以及偏差信号等仿真曲线。
根据题意有:单位阶跃输入时:响应:四、实验报告1)按照实验报告所要求的统一格式,填写实验报告;2)记录控制器参数设计过程、结果、Simulink仿真图和相关响应曲线。
3)根据实验过程和结果进行分析。
能否对单位加速度信号设计无纹波控制器?说明理由。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计控实验四最少拍控制算法研究
东南大学自动化学院
实验报告
课程名称:计算机控制技术
第 4 次实验
实验名称:实验四最少拍控制算法研究院(系):自动化学院专业:自动化姓名:学号:
实验室: 416 实验组别:
同组人员:实验时间:4月24日
评定成绩:审阅教师:
一、实验目的
1.学习并熟悉最少拍控制器的设计和算法;
2.研究最少拍控制系统输出采样点间纹波的形成;
3.熟悉最少拍无纹波控制系统控制器的设计和实现方法。
二、实验设备
1.THBDC-1型 控制理论·计算机控制技术实验平台
2.PCI-1711数据采集卡一块
3.PC 机1台(安装软件“VC++”及“THJK_Server ”)
三、实验原理
1)最小拍系统
在采样控制系统中,一般把一个采样周期称作一拍。
在典型输入信号作用下,经过最少拍,使输出量采样时刻的数值能完全跟踪参考输入量的数值,跟踪误差为零的系统称为最少拍系统。
计算机控制系统的方框图为:
图4-1 最少拍计算机控制原理方框图
根据上述方框图可知,有限拍系统的闭环脉冲传递函数为: )
()(1)()()()()(z G z D z G z D z R z C z H +== (4-1) )
()(11)()()(1z G z D z R z E z H +==- (4-2) 由(4-1) 、(4-2)解得:
)
(1)()(1)(z H z H z G z D -⋅=
(4-3) 首先要使系统的过渡过程在有限拍内结束,显然,这样对系统的闭环脉冲传递函数)(z H 提出了较为苛刻的要求,即其极点应位于z 平面的坐标原点处。
亦即希望系统的脉冲传递函数为
101()()k k k F z H z a a z a z z
--=+++=L (4-4) 式中:F(z)为H(z)的分子多项式,k 为某一整数。
式(4-4)表明H(z)的极点都在z 平面的原点,系统的脉冲响应在经过了有限数k 拍以后就变为零,过渡过程结束。
式(4-4)表明了离散系统中,为了使过渡过程较快地结束应符合的条件。
K 是个有限值,它至少应该是什么数值呢?能够分析一下闭环传递函数H(z)。
将式(4-4)代入D(z)表示式,得
)]
([)()(1)(1)()(1)(z F z z F z G z H z H z G z D k -⋅=-⋅= (4-5) 如果m 和n 分别为对象和保持器的组合脉冲传递函数G(z)的分子和分母的阶次,l 为式(4-5)中F(z)的阶次,要使D(z)能实现,就应使分母的阶次大于分子的阶次
k n m l ≥-+ (4-6)
由式(4-6)可见,当0l =时,H(z)的分子0()F z F ==常数,暂态响应的持续节拍数最少。
式中n 和m 是由对象、保持器决定的,是不可变部分。
这时应有
k n m ≥- (4-7)
这是过渡过程所能达到的最低极限节拍数,它规定了“最少
拍”的极限数。
2)无稳态误差的最小拍系统
由王勤主编教材P89~P90的理论推导,能够知道,为保证系统稳态误差为零且拍数最少,应取
111()(1)()k H z z F z --=-
(4-8)
其中1()F z 为不包含G(z)的零点和极点的多项式。
为式(4-8)表示了无稳态误差的最少拍系统,其1()H z -满足的条件。
另外,为了使系统的暂态过程在有限时间内结束,H(z)必须是1z -的有限多项式。
这两者都要满足,因而应使1()F z 为1z -的有限多项式。
最简单的情况是1()1F z =,这时
(1)对阶跃输入
11()1H z z --=-
1()H z z -= 因而1
1)(11)(1)(1)()(1)(11-⋅=-⋅=-⋅=--z z G z z z G z H z H z G z D (2)对斜坡函数输入
121()(1)H z z --=-
或 12()2H z z z --=-
从而有 2
2121)1(12)(1)1(2)(1)(--⋅=--⋅=---z z z G z z z z G z D (3)对加速度函数输入
131()(1)H z z --=-
或 123()33H z z z z ---=-+
从而有 3231321)1(133)(1)
1(33)(1)(-+-⋅=-+-⋅=----z z z z G z z z z z G z D
3)无纹波,无稳态误差的最少拍系统
用前述方法设计的最少拍控制系统,对于符合原设计的输入信号能很快地跟踪。
然而,如果进一步用改进的z 变换法来研究所设计的系统,就会发现问题。
这种改进的z 变换不但能求出采样时刻的系统输出,而且能够研究采样间隔中,输出的变化情况。
用这种z 变换将发现用前述方法设计的系统,在采样时刻之间存在着波动。
有纹波的系统,在采样时刻之间存在误差,而且功率损耗、振动等也很大,它将加快执行机构等可动部件的磨损。
为此,必须改进设计方法,使设计出的系统满足无纹波的条件。
(1)最少拍系统产生纹波的原因
经分析可知,最少拍系统虽然经过有限拍后能使采样时刻的稳态误差为零,从而使数字控制器的离散输入量E(z)为零。
但控制器的输出并没有达到稳态值,依然是上下波动的。
亦即控制器的输出U(z)不能在有限拍内变为零。
如果整个系统以U(z)为输出量,设这时的闭环传递函数为()D H z 。
同样,如果这一闭环传递函数也能表示成极点都在z 平面原点的形式,则过渡过程也能在有限拍内结束。
(2)无纹波最少拍系统的设计
根据王勤主编教材P93的理论推导可知,无纹波最少拍系统的闭环传递函数应分别为
0()()()()k k F z P z F z H z z z
== (4-9) 0
()()()D k F z Q z H z z
= (4-10) 式中:()
()()P z G z Q z =,0()F z 为z 的多项式。
上述传递函数能保证系统的输出Y(z)和控制器输出U(z)的暂态过程均能在有限拍内结束。
式(4-9)说明,无纹波最少拍系统的闭环传递函数H(z)不但应为1z -的多项式,而且应包含G(z)的全部零点。
由式(4-5)可得
)
()()()()(1)()(1)(00z P z F z z Q z F z H z H z G z D k -=-⋅= 在最简单的情况下,0()F z 为常数。
为了保证D(z)是可实现的,至少要使k 大于或等于Q(z)的阶次,即
k n ≥ (4-11)
将式(4-7)与式(4-11)相比,发现由于要求无纹波,系统的最少拍增加了m 拍,响应的暂态过程也延长m 拍。
4)斜坡输入下最少拍系统设计举例
(1)斜坡输入下无稳态误差最少拍系统设计 设被控对象为二阶系统,其传递函数为)
1()(1+=s T s K s G 对于二阶被控对象加零阶保持器后对象的传递函数为:。