电动机转子动平衡工艺的设计
无刷电机转子动平衡标准

无刷电机转子动平衡标准1. 引言1.1 背景介绍无刷电机转子的动平衡是保证电机运行稳定、提高效率的重要环节。
在无刷电机中,转子动平衡是指转子在高速旋转时,各部分质量均匀分布,转子的质心与旋转轴重合,从而确保转子在运行过程中不会产生不平衡力,使电机运行更加平稳。
无刷电机在工业生产和生活中得到广泛应用,其性能直接关系到设备的稳定运行和寿命。
随着无刷电机的广泛应用和需求增加,对其动平衡标准的要求也越来越高。
如果无刷电机转子动平衡不达标,会导致电机运行时产生振动和噪音,影响设备的正常运行,甚至损坏设备。
制定无刷电机转子动平衡标准是保证电机性能和质量的基础,同时也是提高产品竞争力的重要手段。
本文将结合无刷电机转子动平衡的原理、方法、标准制定、实验设计和结果分析,探讨无刷电机转子动平衡标准的重要性,展望未来研究方向,总结无刷电机转子动平衡的关键问题,为无刷电机行业的发展提供参考和指导。
1.2 研究意义无刷电机是现代电机技术中的重要组成部分,其转子动平衡对电机的性能和稳定性有着至关重要的影响。
研究无刷电机转子动平衡的意义在于提高无刷电机的运行效率和可靠性,进一步推动无刷电机技术的发展。
通过对无刷电机转子的动平衡进行研究和控制,可以减少电机在运行过程中的振动和噪音,延长电机的使用寿命,提高电机的工作效率。
无刷电机广泛应用于各个领域,如家电、汽车等,对无刷电机转子动平衡进行研究也有助于提升这些领域产品的性能和质量。
研究无刷电机转子动平衡的意义在于为电机技术的发展和应用提供技术支持,推动无刷电机在各个领域的广泛应用。
1.3 研究目的研究目的是对无刷电机转子的动平衡进行标准化,以确保无刷电机运行时转子的平衡性能达到一定的要求。
通过研究目的,可以确定无刷电机转子动平衡标准的制定需要考虑的关键因素和指标。
深入研究无刷电机转子动平衡的标准化过程,可以为相关行业提供参考,提升产品的品质和性能。
通过分析无刷电机转子动平衡的标准化过程,可以为实际生产中的无刷电机转子动平衡提供指导,提高产品的生产效率和质量。
转子平衡的原理和方法

影响设备寿命和安全性。因此,需要对汽轮机转子进行平衡校准。
02 03
平衡校准方法
通常采用去重或加重的方法,对转子的质量分布进行调整,以达到平衡 状态。具体操作包括确定不平衡质量的大小和位置,采用铣削或钻孔的 方式去除多余的质量,或者添加配重来平衡质量。
平衡校准的步骤
首先对转子进行动平衡试验,确定不平衡质量的大小和位置;然后根据 试验结果,对转子进行去重或加重处理;最后再次进行动平衡试验,确 认转子达到平衡状态。
平衡校准方法
离心泵转子的平衡校准通常采用去重或加重的方法,对转子的质量分布进行调整。具体操作包括确定不平衡质量的大 小和位置,采用铣削或钻孔的方式去除多余的质量,或者添加配重来平衡质量。
平衡校准的步骤
首先对转子进行动平衡试验,确定不平衡质量的大小和位置;然后根据试验结果,对转子进行去重或加 重处理;最后再次进行动平衡试验,确认转子达到平衡状态。
优化平衡步骤
制定合理的平衡方案
01
根据转子的特性和要求,制定合理的平衡方案,以减少平衡时
间和提高效率。
自动化平衡操作
02
通过自动化技术实现平衡操作的自动化,可以减少人为误差和
提高平衡效率。
优化平衡顺序
03
根据转子的结构和不平衡量分布情况,优化平衡顺序,以更有
效地实现平衡。
降低平衡成本
合理选用测量仪器
轴承磨损
转子不平衡会导致轴承承 受额外的径向载荷,加速 轴承磨损和损坏。
噪音和振动
转子不平衡还会产生噪音 和振动,影响工作环境和 人员健康。
转子平衡的必要性
提高机器性能
通过转子平衡可以减小机 械振动,提高机器性能和 稳定性。
延长设备寿命
【电机工艺】大转子动平衡过程控制要点
【电机工艺】大转子动平衡过程控制要点与小规格电机相比,大规格电机转子的动平衡是一个非常关键的工艺,无论是铸铝转子、铜条转子还是绕线转子,其平衡的过程控制都非常重要。
Ms.参与各位就大规格电机转子的动平衡与各位进行一个简单交流。
大规格转子动平衡要素分析为了保证转子精度,动平衡是一个必要的环节,但转子动平衡过程前的相关环节更重要,如电机转轴自身的平衡程度、转子铁芯的平衡情况,以及铁芯与轴的配合情况都是不可大意的地方。
大规格电机的轴大部分是幅板结构,幅板加工的精度、焊接时彼此的分度、焊缝的符合性等都必须控制好;为了保证后期加工的顺利进行,不少的电机厂家在铁芯套入以前先进行轴的平衡。
铁芯制造过程中,冲片的平整度、毛刺的控制必须到位,预防出现铁芯马蹄,以进一步减小转子的初始不平衡量。
铸铝过程中的缺陷,绕线转子嵌线、接线环节导致的不平衡,铜条转子焊接过程导致的不对称等都是直接影响平衡效果的因素;因此,控制转子动平衡应从转子的初始不平衡开始控制。
转子动平衡的意义转子不平衡是造成转子振动过大以及产生噪音的主要原因之一,直接影响电机的工作性能和使用寿命。
因此,研究转子特别是柔性转子动平衡技术对电机品质提升具有重要的意义。
常用机械中包含着大量的作旋转运动的零部件,例如各种传动轴、主轴、电动机和汽轮机的转子等,统称为回转体。
在理想的情况下回转体旋转时与不旋转时,对轴承产生的压力是一样的,这样的回转体是平衡的回转体。
但工程中的各种回转体,由于材质不均匀或毛坯缺陷、加工及装配中产生的误差,甚至设计时就具有非对称的几何形状等多种因素,使得回转体在旋转时,其上每个微小质点产生的离心惯性力不能相互抵消,离心惯性力通过轴承作用到机械及其基础上,引起振动,产生了噪音,加速轴承磨损,缩短了机械寿命,严重时能造成破坏性事故。
为此,必须对转子进行平衡,使其达到允许的平衡精度等级,或使因此产生的机械振动幅度降在允许的范围内。
以上非官方发布内容,仅代表个人观点。
《转子动平衡——原理、方法和标准》

技术讲课教案主讲人:罗仁波培训题目:《转子动平衡——原理、方法和标准》培训目的:多种原因会引起转子某种程度的不平衡问题,分布在转子上的所有不平衡矢量的和可以认为是集中在“重点”上的一个矢量,动平衡就是确定不平衡转子重点的位置和大小的一门技术,然后在其相对应的位置处移去或添加一个相同大小的配重。
内容摘要:动平衡前要确认的条件:1.振动必须是因为动不平衡引起。
并且要确认动不平衡力占振动的主导。
2.转子可以启动和停止。
3.在转子上可以添加可去除重量。
培训教案:第一章不平衡问题种类为了以最少的启停次数,获得最佳的平衡效果,我们不仅要认识到动不平衡问题的类型(静不平衡、力偶不平衡、动不平衡,如下图),而且还要知道转子的宽径比及转速决定了采用单平面、双平面还是多平面进行动平衡操作。
同时也要认识到转子是挠性的还是刚性的。
●●刚性转子与挠性转子✧对于刚性转子,任何类型的不平衡问题都可以通过任选的二个平面得以平衡。
✧对于挠性转子,当在一个转速下平衡好后,在另一个转速下又会出现不平衡问题。
当一个挠性转子首先在低于它的70%第一监界转速下,在它的两端平面内加配重平衡好后,这两个加好的配重将补偿掉分布在整个转子上的不平衡质量,如果把这个转子的转速提高到它的第一临界转速的70%以上,这个转子由于位于转子中心处的不平衡质量所产生的离心力的作用,而产生变形,如图10所示。
由于转子的弯曲或变形,转子的重心会偏离转动中心线,而产生新的不平衡问题,此时在新的转速下又有必要在转子两端的平衡面内重新进行动平衡工作,而以后当转子转速降下来后转子又会进入到不平衡状态。
为了能在一定的转速范围内,确保转子都能处在平衡的工作状态下,唯一的解决办法是采用多平面平衡法。
✧挠性转子平衡种类1.如果转子只是在一个工作转速下运转,小量的变形不会产生过快的磨损或影响产品的质量,那么可以在任意二个平面内进行平衡,使轴承的振动降低到最小即可。
2.如果一个挠性转子,只是在一个工作转速下工作,但是将转子的变形量降低到最小是极其重要的,这时最好采用多平面动平衡修正。
电机转子动平衡作业指导书
电机转子动平衡作业指导书转子动平衡作业指导书1 主题内容与适用范围1.1 本技术条件规定了低电压电机转子平衡的技术要求、检验方法。
1.2 本技术条件适用于发电机、电动机及其对振动无特殊要求的派生系列电机的转子平衡。
2 技术要求2.1 发电机、电动机的转子均需校平衡。
2、4极电机转子必须校动平衡,其他级数允许校静平衡。
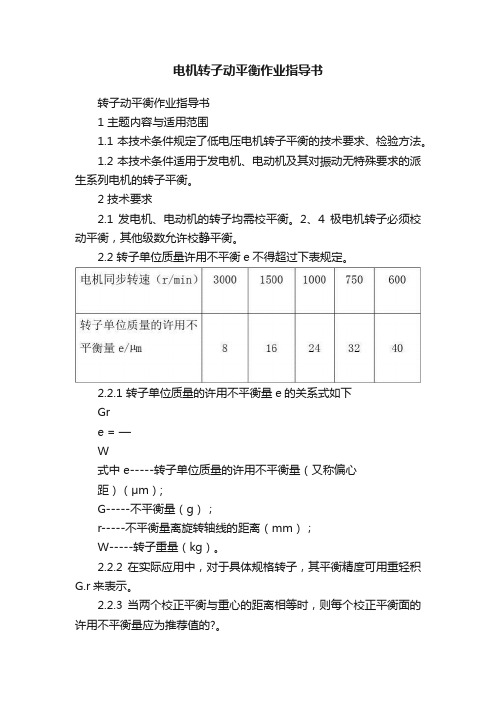
2.2 转子单位质量许用不平衡e不得超过下表规定。
2.2.1 转子单位质量的许用不平衡量e的关系式如下Gre = —W式中 e-----转子单位质量的许用不平衡量(又称偏心距)(μm);G-----不平衡量(g);r-----不平衡量离旋转轴线的距离(mm);W-----转子重量(kg)。
2.2.2 在实际应用中,对于具体规格转子,其平衡精度可用重轻积G.r来表示。
2.2.3 当两个校正平衡与重心的距离相等时,则每个校正平衡面的许用不平衡量应为推荐值的?。
2.3 校转子平衡时,允许采用加重或去重法。
用加重法校平衡时,所加的平衡块应焊牢或铆牢在转子上。
2.4 多速电机转子平衡应以电机的最高工作转速为准。
2.5 校平衡时,在转子轴上的键槽中应安装半键。
当电机采用带键的工程塑料风扇时,则转子的风扇挡键槽可不需安装半键。
2.6 校好平衡后的转子,操作者再复核一次平衡精度。
3 质量检查3.1 从2.1规定的单位质量的许用不平衡量e的关系式所计算出不平衡量G的值,置于任一平衡柱上,其不平衡位置必须在该处。
3.2 每批抽查3%~5%,但不少于两件;若有不合格者,应加倍抽查;若再有不合格者,则应全部检查。
转子动平衡工艺守则

转子动平衡工艺守则1.适用范围:本守则适用低压三相交流异步电动机(Y2、YBFZ系列风机隔爆三相异步电动机)的转子动平衡。
2.主要设备、工具及材料2.1 DPH电脑数量动平衡试验机2.2镀锌平垫片2.3平衡用半平键2.4 榔头2.5 润滑油2.6 黑色记号笔3.准备工作及工艺要求3.1根据生产任务单核对查看转子,如有损伤等不符合要求,不得使用。
3.2根据被校转子轴承挡之间的距离,调整好左、右支架的位置,并紧固好。
按转子轴承挡尺寸及转子轴线水平状态调整好支架上滚轮高度,使转子在转动时不致窜动。
3.3应做好清洁工作,特别是轴承挡及滚轮表面不允许有灰尘杂物,以免影响平衡精度,同时在转子安放后支承处加少量润滑油。
3.4调整好支架上的限位支架及安全架,防止转子轴向窜动及避免不安全事故。
3.5根据被校转子的质量、转子外径、电机的高低转速,调节好皮带的张紧力和转速档。
张紧力的大小,以使转子迅速启动为宜。
3.6接通电源,打开控制电脑,按随机操作说明书操作。
4.工艺过程4.1在转子轴伸平键处装上平衡用半平键,用胶带固定好,并用黑色记号笔轴向划一道记号线。
4.2将转子轻放在支架上,调整光电头离记号线的高度和距离,使光电头垂直对准记号线,使光敏管接受到信号即可。
特别要注意的是在光电头照射处应避免强光源干扰。
4.3按下启动按钮,转子转动,等显示器A、B两面显示的数值稳定后,锁定数值。
根据A、B两面的锁定不平衡量和相位角,在相应角度位置的平衡柱上加上等量的镀锌平垫片。
4.4通过试加配重后,进行复检。
反复数次,使转子的不平衡量符合动平衡技术要求。
4.5许用不平衡见附表。
4.6取下被校转子,将平衡垫圈铆牢在平衡柱上。
4.7加重后应将被检转子再置于支架上,复校一次,检验是否达到平衡要求。
5.注意事项5.1工作前要认真检查设备,确认正常后开始工作。
5.2动平衡机每次工作前,用标准芯轴校准一次。
5.3将校准好的转子放在指定的工位器具上,不得磕碰。
电机转子动平衡机设计(本人全程自己设计分析撰写)
电机转子动平衡机设计(本人全程自己设计分析撰写)在本设计中,我将分为以下几个方面进行详细介绍和分析:动平衡原理、设计思路、结构设计、关键零部件选择和设计结果验证。
首先,动平衡原理是电机转子动平衡机设计的基础。
动平衡原理是指通过在转子上加入校正质量,使电机转子的动平衡误差降到最小的一种方法。
根据动平衡原理,我们可以计算出校正质量的大小和位置。
接下来,我将介绍设计思路。
在电机转子动平衡机设计中,我们需要考虑以下几个方面:1)结构设计:电机转子动平衡机应该具备稳定的结构和可调节的校正质量,以确保平衡效果。
2)控制系统设计:需要设计一个合理的控制系统来自动调节校正质量的位置和大小。
3)激振力设计:激振力是用来激发电机转子振动的力,需要设计合适的激振力来实现动平衡。
接下来,我将详细介绍结构设计。
在电机转子动平衡机的设计中,结构设计是非常关键的。
首先,我们需要设计一个稳定的基座,以确保电机转子动平衡机的稳定性。
基座应该具备足够的强度和刚度来承受电机转子的重量和振动。
其次,我们需要设计一个可调节的校正质量安装装置,以便精确调节校正质量的位置和大小。
最后,我们还需要设计一个支撑装置,用于将电机转子固定在电机转子动平衡机上,并通过激振力激发电机转子振动。
接下来,我将介绍关键零部件的选择。
在电机转子动平衡机的设计中,有几个关键的零部件需要选择。
首先,我们需要选择合适的电机转子支撑装置,以确保电机转子能够牢固地固定在电机转子动平衡机上。
其次,我们需要选择合适的校正质量,以确保调节校正质量的准确性和稳定性。
最后,我们还需要选择合适的激振力装置,以实现激发电机转子振动的效果。
最后,我将介绍设计结果的验证。
在设计完成之后,我们需要对电机转子动平衡机进行验证。
验证的方法可以是通过实验和模拟计算两种方式进行。
通过实验可以验证电机转子动平衡机在实际使用中的性能和效果,通过模拟计算可以验证设计方案是否符合动平衡原理的要求。
总结起来,电机转子动平衡机设计是一个综合性的项目,需要考虑结构设计、控制系统设计、激振力设计和关键零部件的选择。
电动机转子动平衡工艺的设计
电动机转子动平衡工艺的设计摘要:电动机运行噪声主要由机械噪声、电磁噪声和空气动力噪声构成。
实践研究表明,三类噪声中机械噪声占65%~75%,电磁噪声约占25%,空气动力噪声约占10%以下,而引起电动机机械噪声的主要原因是电动机转子不平衡。
电动机转子的不平衡在电动机运行过程中将产生周期性机械振动,在转子轴承上产生附加的动压力,降低轴和轴承的寿命。
降低电动机转子不平衡,除了提高零件的设计精度、制造精度外,最有效的方法是对电动机转子进行不平衡校正,其实质是调整转子部件的质量分布,使转子在转动时的离心力系达到平衡,,以减少轴承上的附加动压力,降低电动机运行的机械振动和机械噪声。
关键词:电动机;转子动平衡;工艺设计1转子动平衡工艺的设计1.1平衡支承面和校正面的设置旋转机械动平衡的品质是以旋转机械支承轴承的单位承压大小为依据的,所以将电动机转子支承轴承的位置设置为转子动平衡校正的支承面。
根据电动机转子的结构特点,可将其看作为刚性转子。
对于刚性转子的任意不平衡量的分布,只要取两个校正面进行动平衡校正,就能将转子的剩余不平衡量校正到小于或等于转子的允许不平衡量。
按照电动机转子的设计和制造工艺特点,可将两个校正面U per1 和Uper2 设置在转子铁心附近。
转子结构、动平衡校正的支承面及校正面的设置如图1所示。
1.2平衡精确度和允许不平衡量的确定确定转子的允许不平衡量是一项很复杂的工作,因为在转子批量生产的条件下,必须同时兼顾工艺的必要性,工艺的可行性(因为涉及转子个体之间的差异性)和工艺成本等诸多方面的因素。
目前,国际上还没有权威的确定旋转机械允许不平衡量的理论计算方法,而确定转子的允许不平衡量最有效的方法是通过耐心的试验,作统计和分析,但仅靠试验的方法显然不能满足大批量标准化生产的要求。
因此,根据国家标准GB/T9239.1idtISO1940推荐的要求和多年的实践经验,本系统按G2.5的精度对转子进行动平衡2动平衡的校正2.1校正方式的确定转子两个校正面的动平衡校正,校正量可以是正的,也可以是负的,所以转子动平衡的校正方式一般分为去重法和加重法两种。
电动机转子平衡与轴承负荷均衡设计
电动机转子平衡与轴承负荷均衡设计电动机是现代工业中不可或缺的重要设备,而电动机的转子平衡与轴承负荷均衡设计对于电动机的性能和寿命具有重要影响。
本文将探讨电动机转子平衡与轴承负荷均衡设计的主要原理和方法。
一、电动机转子平衡设计电动机的转子平衡是指在转子高速旋转时,使转子各部分质量同心并保持平衡状态的设计。
转子平衡的不良会导致电动机运行时引起振动和噪音,严重的情况下甚至会损坏轴承和其他机械部件,降低电机的工作效率和寿命。
1. 静平衡和动平衡电动机的转子平衡可以分为静平衡和动平衡两种类型。
静平衡是指转子在任何转动位置时都保持平衡状态。
在静平衡设计中,转子的质量中心必须在转轴上,并且转子与转轴的质量和转动惯量必须相等。
动平衡是指转子在高速旋转时的平衡状态。
在动平衡设计中,转子的质量中心必须与转轴在同一直线上,并且转子在转动过程中的离心力必须保持平衡。
2. 转子平衡的方法为了实现良好的转子平衡设计,常用的方法包括质量补偿和质量分离等。
质量补偿是通过增加或减少特定位置的质量来实现转子平衡。
在设计过程中,可以根据静平衡原理确定质量不平衡的位置,并在该位置上增加或减少适当的质量。
质量分离是将转子的质量集中在基本平衡轴上,以减少转子的不平衡。
因此,设计者可以根据转轴上的基本不平衡将质量集中在一个特定位置上。
3. 转子平衡的检测和调整转子平衡的检测可以通过动平衡机进行。
动平衡机能够测量转子的不平衡情况,并根据测量结果确定不平衡的位置和大小。
一旦转子的不平衡被检测出来,就需要对其进行调整。
调整转子可以通过加重或减重的方式来完成。
通常情况下,可以在转子的不平衡位置上加上或者减去适当的质量,以实现转子的平衡。
二、电动机轴承负荷均衡设计电动机轴承负荷均衡是指在电动机工作过程中,使轴承均衡承载转子的负荷,避免轴承过载和轴承寿命的降低。
轴承的负荷均衡设计对于电动机的稳定运行和长寿命具有重要作用。
1. 负荷均衡的原理在电动机工作过程中,轴承要承受转子的径向力和轴向力。
电动机转子平衡工艺
第一节三相异步电动机一、概述电机是一种能量或信号进行交换的电磁装臵,它的工作原理是基于电磁感应定律和电磁力定律。
直流电机电机单相交流电机同步电动机三相异步电动机交流旋转电机可分为同步电动机和异步电动机。
如果电机转子的转速n与定子旋转磁场的转速n1相等,则转子与定子旋转磁场在空间同步地旋转,这种电机就称为同步电机。
如果电机转子的转速n不等于定子旋转磁场的转速n1,转子与定子旋转磁场在空间不同步地旋转,这种电机就称为异步电机。
异步电机主要用做电动机,电动机主要是将电能转化为机械能,三相交流电接在定子绕组上,定子绕组就能够产生一个旋转磁场,该磁场相对切割转子绕组,在转子绕组中感生电动势,如果转子绕组电路闭合,则会产生感生电流,该电流与定子旋转磁场相互作用,使转子绕组导体受到电磁力,而使转子跟着定子旋转磁场同方向旋转,异步电动机就能带动机械负载。
90%左右的电动机均为异步电动机。
异步电动机也可以作为发电机使用,它是将机械能转变成电能。
在电网尚未达到的山区农村,要建立小型水电站时,可以用异步电机来发电,不过异步发电机的工作性能较差,只能用于要求不高的地方。
小型异步电动机在机械工业中应用最广泛,目前,其基本系列是Y系列,小型异步电动机从50年代到现在已经过三次全国统一设计,第一次于1953年统一设计了J,Jo型,第二次1958年设计,60年代初开始采用的J2,JO2型,第三次是Y系列,是80年代取代JO2系列的更新换代产品。
在Y系列基础上派生出许多特殊的系列,如能变极变速的YD系列,采用电磁调整的YCT系列;能自制动的YEP系列等。
目前,我国生产的异步电动机按尺寸大小可以分为大型、中型、小型、和微型四种,电动机的中心高H大于630mm或定子铁心外径D1大于1000mm的称为大型电动机。
H在355~630mm或D1在500~1000mm范围的称为中型电动机H在80~315mm或D1在120~500mm范围的称为小型电动机H在45~71mm的称为微型电动机二、结构电机主要由定子和转子两大部分构成,定子和转子之间有一个很小的空气隙(一般为0.2~1.5毫米)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2008, 35 (10 )
工艺与材料 ξ EM CA
图 2 图解法求两校正平面的允许不平衡量
从图 2可明显看出 ,位于 OXGR 四边形内的
任意点均满足式 (6)和式 (7)的约束 。因此 ,两校
正面的 Uper1和 Uper2的解不惟一 ,如取 G点 ,则左 右两校正面 Uper1与 Uper2也可同时达到其允许不平 衡量 ,但此时的 Uper1与 Uper2不相等 ,不利于大批量 生产 ,同时左右两支承面 U1与 U2 的动载荷也将 出现在不利的相位上 。根据实践经验 ,在图 2 中
如图 1所示 ,转子为重心与两支承面不对称 转子 ,所以左右两支承面的动载荷分别为 :
U1 =
1
-
M L
·U p e r
(4)
U2
=
M L
·U p e r
(5)
为了保证两支承面的动载荷不超载 ,两校正
面的允许不平衡量 Uper1与 Uper2还必须满足式 ( 6 ) 和式 (7)的约束条件 。
根据式 ( 1) 、( 2 )和表 1,该电动机转子允许 不平衡量设计值为 :
关键词 : 转子动平衡 ; 动平衡精度 ; 允许剩余不平衡量 中图分类号 : TM303. 3 文献标识码 : A 文章编号 : 167326540 (2008) 1020055205
Techn ica l D esign of D ynam ic Ba lance for Autom ob ile W iper M otor Rotor
由式 ( 3) 、( 15) 、( 16) 、( 17)及表 1的数据计 算出转子两校正面的允许不平衡量 Uper1和 Uper2 为:
Uper1
= Uper
L -M (L - A ) ±D (L - B )
= 25.
4×
103 - 51 ( 103 - 20) ±1. 632 ×( 103 - 70) 上文提到 ,根据两个校正面上的允许不平衡量 Uper1与 Uper2之和必须不大于转子总的允许不平衡 量 Uper的 分配 原则 , 取 Uper1 = 9. 651 g ·mm , 而 Uper1的另一个解 45. 319 g·mm 已经大于转子总的 允许不平衡量 Uper ,与分配原则矛盾 ,故舍去 。则 Uper2 =D ×Uper1 = 1. 632 ×9. 651 = 15. 75 g·mm。 针对图 1的转子结构 ,也可根据以下方法分 配 Uper1和 Uper2 :
— 55 —
工艺与材料 ξ EM CA
2008, 35 ( 10 )
①左轴承挡圈 ; ②右轴承挡圈 图 1 转子结构 、支承面及校正面的设置
工艺设计 。 如某小型电动机转子的最高转速设计值为 1 400 r/m in,则由式 ( 1 )可计算出转子在最高转 速下允许的不平衡度 eper。该值也可根据国家标 准 GB / T9239. 1 idt ISO 1940中 ,动平衡品级相应 的允许剩余不平衡度对照图直接查取 。
— 56 —
|Uper1
|·
1-
A L
+ |Uper2 | ·
1-
B L
≤U1
(6)
|Uper1
| ·A
L
+
| Up e r2
| ·B
L
≤U2
(7)
根据式 (4) ~ (7)的约束方程 ,可得出两校正 面的允许不平衡量 Uper1与 Uper2的取值不是惟一 的 。图解法可直观地反映这点 ,用图解法可求出 两校正面分配的允许不平衡量 Uper1与 Uper2的取值 范围 ,如图 2所示 。
( 15 )
U p e r2
= UperA
M
±DB
( 16 )
式 ( 15) 、( 16)即为图 1转子中两校正面分配
的 Uper1和 Uper2 。 由式 ( 14)及表 1的数据 , 计算电动机转子两
校正面允许不平衡量的分配比率 D 值为 :
D = M - A = 51 - 20 = 1. 632 ( 17) B - M 70 - 51
±U p e r2
1- B L
ω2
( 10 )
f2 =
U p e r1
A L
±U p e r2
B L
ω2
( 11 )
式中 ,“ + ”表示 1校正面允许的不平衡量 Uper1与 2校正面不平衡量 Uper2的相位相同 ;“ - ”表示 1 校正面允许的不平衡量 Uper1与 2校正面不平衡量 Uper2的相位相反 。
B - M ∶M - A = 70 - 51∶51 - 20 = 0. 38∶0. 62 B - A B - A 70 - 20 70 - 20 则:
Uper1 = 0. 38 ×Uper = 0. 38 ×25. 4 = 9. 652 Uper2 = 0. 62 ×Uper = 0. 62 ×25. 4 = 15. 75
2008, 35 (10 )
工艺与材料 ξ EM CA
电动机转子动平衡工艺的设计
万军红 (上海电机学院 , 上海 200240 )
摘 要 : 对电动机转子进行动平衡检测和校正是降低电动机运行噪声的有效方法 。在转子动平衡校正 工艺设计中 ,确定电动机转子总的剩余不平衡量和将总的剩余不平衡量分配到若干个校正平面是转子动平 衡工艺设计的关键 。
根据上文分析 ,按 f1 ≤F1 , f2 ≤F2 , 消去式 ( 8) ~ ( 11)中的 ω得 :
U p e r
1-M L
= Uper1
1- A L
±U p e r2
1- B L
( 12 )
Up
e
r
M L
= Uper1
A L
±U p e r2
B L
( 13 )
针对图 1所示的转子结构 ,按一定比例对两
U p e r
= eper ·m
= 9.
55
Su m n0
= 9.
55
×2.
5 /1
400
×
1 490 = 25. 4
(3)
式中 , Su≈ 2. 5 mm / s (根据国标 GB / T9239. 1 idt ISO 1940) 。
1. 3 允许剩余平衡量的分配
当转子的允许不平衡量确定以后 ,将转子的
承的单位承压大小为依据的 ,所以将电动机转子
支承轴承的位置设置为转子动平衡校正的支承 面 。根据电动机转子的结构特点 ,可将其看作为 刚性转子 。对于刚性转子的任意不平衡量的分 布 ,只要取两个校正面进行动平衡校正 ,就能将转 子的剩余不平衡量校正到小于或等于转子的允许 不平衡量 。按照电动机转子的设计和制造工艺特 点 ,可将两个校正面 Uper1和 Uper2设置在转子铁心 附近 。转子结构 、动平衡校正的支承面及校正面 的设置如图 1所示 。 1. 2 平衡精确度和允许不平衡量的确定 确定转子的允许不平衡量是一项很复杂的工 作 ,因为在转子批量生产的条件下 ,必须同时兼顾 工艺的必要性 ,工艺的可行性 (因为涉及转子个 体之间的差异性 ) 和工艺成本等诸多方面的因 素 。目前 ,国际上还没有权威的确定旋转机械允 许不平衡量的理论计算方法 ,而确定转子的允许 不平衡量最有效的方法是通过耐心的试验 ,作统 计和分析 ,但仅靠试验的方法显然不能满足大批 量标准化生产的要求 。因此 ,根据国家标准 GB / T9239. 1 idt ISO 1940 推荐的要求和多年的实践 经 验 ,本系统按 G2. 5的精度对转子进行动平衡
取直角 坐 标 的 平 分 线 与 OXGR 四 边 形 的 交 点
G’,此时的 Uper1等于 Uper2 。从图 2 可以看出左右 两支承面 U1与 U2 的动载荷与其允许值可能出现 微小的差别 。
上述旋转机械动平衡的品质是以旋转机械支
承轴承的单位承压大小为依据的 ,所以设图 1 中
的左支承 U1 为基准 ,则转子允许的不平衡量 Uper 在左右两支承点 U1 、U2 (左右支承轴承 )上产生的 动压力 F1 、F2 分别为 :
WAN J un2hong ( Shanghai D ianji University, Shanghai 200240, China)
Abstract: Balancing measurement and adjustment to the motor rotor’s sub2assembly are effective methods, which can decrease the noise of running motor. In dynam ic balancing and adjustment technical design, confirm ing the overall specification of residual unbalanced and distribution the total residual unbalanced to several adjustment p lanes need to be adjustment are keys in motor’s rotor technical design.
针对图 1所示 ,电动机转子利用这两种方法 进行分配 Uper1和 Uper2 ,其分配结果一致 。
Key words: dynam ic ba lance of rotor; ba lanc ing accuracy; spec if ica tion of residua l unba lance
0 引 言
电动机运行噪声主要由机械噪声 、电磁噪声 和空气动力噪声构成 。实践研究表明 ,三类噪声 中机械噪声占 65% ~75% ,电磁噪声约占 25% , 空气动力噪声约占 10%以下 ,而引起电动机机械 噪声的主要原因是电动机转子不平衡 。电动机转 子的不平衡在电动机运行过程中将产生周期性机 械振动 ,在转子轴承上产生附加的动压力 ,降低轴 和轴承的寿命 。