电机驱动程序(使用ULN2803芯片)
uln2003驱动直流电机程序
uln2003驱动直流电机程序
ULN2003作用
ULN2003是大电流驱动阵列,多用于单片机、智能仪表、PLC、数字量输出卡等控制电路中。
可直接驱动继电器等负载。
输入5VTTL电平,输出可达500mA/50V。
ULN2003是高耐压、大电流达林顿系列,由七个硅NPN达林顿管组成。
该电路的特点如下:ULN2003的每一对达林顿都串联一个2.7K的基极电阻,在5V的工作电压下它能与TTL和CMOS电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
ULN2003 是高压大电流达林顿晶体管阵列系列产品,具有电流增益高、工作电压高、温度范围宽、带负载能力强等特点,适应于各类要求高速大功率驱动的系统。
uln2003引脚图及功能。
uln2803工作原理
uln2803工作原理
ULN2803是一种8位继电器驱动器芯片。
它的工作原理如下:
1. 输入信号:ULN2803芯片有8个输入引脚,用于接收外部
输入信号。
当输入信号为高电平时,对应的输出引脚会被拉低。
当输入信号为低电平时,对应的输出引脚会被拉高。
2. 输出驱动能力:ULN2803芯片的每个输出引脚都能驱动高
达500mA的电流。
这使得它在控制各种继电器、电磁阀等高
功率负载时非常有效。
3. 电流限制:ULN2803芯片内部集成了输入端的稳定电流源,用于控制每个输出引脚的电流。
这样可以保证输出的电流在适当范围内,避免过大电流导致芯片损坏。
4. 抑制反馈:ULN2803芯片还内部具有抑制反馈电路,以防
止开关继电器等负载产生过多的电磁干扰。
总的来说,ULN2803芯片通过接收外部输入信号,控制对应
输出引脚的电平状态,从而实现对启动高功率负载(如继电器)的控制。
它具有较高的驱动能力和稳定性,被广泛用于自动化控制、电子设备等领域。
uln2003芯片

uln2003芯片ULN2003芯片:功能、特点及应用ULN2003芯片是一款常用的高电压、高电流驱动器芯片,常被用于电机控制、步进驱动、继电器驱动等应用。
本文将介绍ULN2003芯片的功能、特点及应用。
一、功能ULN2003芯片是一个集成了7个高电压、高电流驱动器的集成电路,每个驱动器的输出端可承受500mA电流,并且可以工作在电压高达50V的条件下。
除了输出端的高电压、高电流特性外,ULN2003芯片还具有以下几个主要的功能:1. 综合保护功能:ULN2003芯片内部具有电压和电流保护电路,当输入信号超过芯片额定电压时,可以自动进行断电保护,避免对芯片造成损坏。
2. 高速驱动能力:ULN2003芯片具有较快的开关速度,可以快速响应输入信号,并输出相应的驱动信号。
3. 高电流承受能力:每个驱动器的输出端可以承受高达500mA电流,可以满足多种高功率设备的驱动要求。
4. 低功耗设计:ULN2003芯片采用精细的低功耗设计,工作时能够有效地减少功耗,提高芯片的稳定性和可靠性。
二、特点除了以上功能外,ULN2003芯片还具有以下几个特点:1. 丰富的输出端口:ULN2003芯片共有7个输出端口,可以同时控制多个设备,方便用户实现多路控制。
2. 输出端口具有隔离功能:ULN2003芯片的输出端口具有隔离功能,可以隔离输入和输出信号,避免干扰和电压噪声对芯片的影响。
3. 可靠性高:ULN2003芯片采用高品质的材料和工艺制造,具有很高的可靠性和稳定性,在长时间工作和恶劣环境下能够正常运行。
4. 简单的引脚布局:ULN2003芯片的引脚布局非常简单明了,用户容易理解和操作。
三、应用ULN2003芯片的广泛应用涉及到多个领域:1. 电机控制:ULN2003芯片可用于控制直流电机的开关和转向等功能,例如电动车、无人机等。
2. 步进驱动:ULN2003芯片可用于步进电机的驱动控制,例如打印机、数码相机等设备。
3. 继电器驱动:ULN2003芯片可用于继电器的驱动控制,常用于工控领域。
ULN2803中文资料_数据手册_参数

ULN2803A中文资料第1页精选内容: ULN2803A达林顿晶体管阵列 SLRS049E - FEBRUARY1997 - REVISED JULY 2006 1邮政信箱 655303 ? 达拉斯,得克萨斯州75265 D 500 MA额定集电极电流(单路输出) D 高压输出... 50 V D 输出钳位二极管 D 输入兼容各种类型 的逻辑 D 继电器驱动器应用 D 兼容ULN2800A系列描述/订购信息 ULN2803A是一款高电压,高电流的产品达林顿晶体管阵列.该设备 由...组成八 NPN达林顿对那特征高压输出同共阴极用于开关感性负载的钳位二极管.该每个达林顿对的集电极电流额定值是 500毫安. 达林顿对可以连接并联以获得更高的电流能力.应用包括继电器驱动器,电锤驱动器,灯驱动器,显示驱动器(LED和气体放电), 线路驱动程序和逻辑缓冲区. ULN2803A具有2.7-K每个达林顿对的Ω系列基极电阻进行操作直接使用TTL或5-V CMOS器件.订购信息 TA包?订购零件号 TOP-SIDE打标 PDIP(N) 20管 ULN2803AN ULN2803AN -40 °C至85°C SOIC(DW) 40管 ULN2803ADW ULN2803A -40℃至85℃ SOIC(DW) 2000卷 ULN2803ADWR ULN2803A ?包装图纸,标准包装数量,热数据,符号和PCB设计指南请 访问 版权 ?2006,德州仪器公司请注意,有关可用性,标准保修和重要应用程序的重要通知德州仪器半导体产品和免责声明出现在本 数据表的末尾. 1 2 3 4五 6 7 8 9 18 17 16 15 14 13 12 11 10 1B 2B 3B 4B 5B 6B 7B 8B GND 1C 2C 3C 4C 5C 6C 7C 8C COM DW或N包装 (顶视 图)生产数据信息截至发布日期为止.产品符合德州仪器的条款规定标准保修.生产加工不一定包括测试所有参数. ULN2803A达林顿晶体管阵列 SLRS049E - FEBRUARY1997 - REVISED JULY 2006 6邮政信箱655303 ? 达拉斯,得克萨斯州75265参数测量 信息注意事项:A.脉冲发生器具有以下特性:PRR = 12.5 KHZ,ZO = 50Ω. B. CL包括探头和夹具电容. C. VIH = 3 V.图9.闭锁测试脉冲 发电机 (见注释A)输入 VS 163 Ω CL = 15 PF (见注B)产量 40微秒 <5 NS <10NS 90% 1.5 V 10% 10% 90% 1.5 V VIH (见注释 C)输入产量 0 2 MH VOH测试电路电压波形 包装信息可订购设备状态 (1)包类型包画画引脚包数量生态计划 (2)铅/球完成 MSL峰值温度 (3) ULN2803ADW活性 SOIC DW 18 40绿色(ROHS&无SB / BR) CU NIPDAU LEVEL-2-260C-1 YEAR ULN2803ADWG4活性 SOIC DW 18 40绿色(ROHS&无SB / BR) CU NIPDAU LEVEL-2-260C-1 YEAR ULN2803ADWR活性 SOIC DW 18 2000绿色(ROHS&无SB / BR) CU NIPDAU LEVEL-2-260C-1 YEAR ULN2803ADWRG4活性 SOIC DW 18 2000绿色(ROHS&无SB / BR) CU NIPDAU LEVEL-2-260C-1 YEAR ULN2803AN活性 PDIP ? 18 20无铅 (ROHS)的 CU NIPDAU N / A为PKG类型 ULN2803ANE4活性 PDIP ? 18 20无铅 (ROHS)的 CU NIPDAU N / A为 PKG类型 (1) 营销状况值定义如下: ACTIVE:推荐用于新设计的产品设备. LIFEBUY:TI已经宣布该设备将停产,终身购买期限已 经生效. NRND:不建议用于新设计.器件正在生产中以支持现有客户,但TI不建议使用此部分一个新的设计.预览:设备已被宣布,但 尚未投入生产.样品或提供或不提供.停产:TI已停止生产该设备. (2) 环保计划 - 计划的环保分类:无铅(ROHS),无铅(ROHS豁 免)或绿色(ROHS和无SB / BR) - 请检查 获取新的可用性信息和其他产品内容详细信息.待定:无铅/绿色转换计划尚未定义.无铅(ROHS):TI的术语“无铅”或“无铅”是 指符合当前ROHS要求的半导体产品对于所有6种物质,包括在均质材料中铅含量不超过0.1%的要求.在哪里设计焊接在高温下,TI无 铅产品适用于特定的无铅工艺.
ULN2003步进电机驱动原理及应用程序
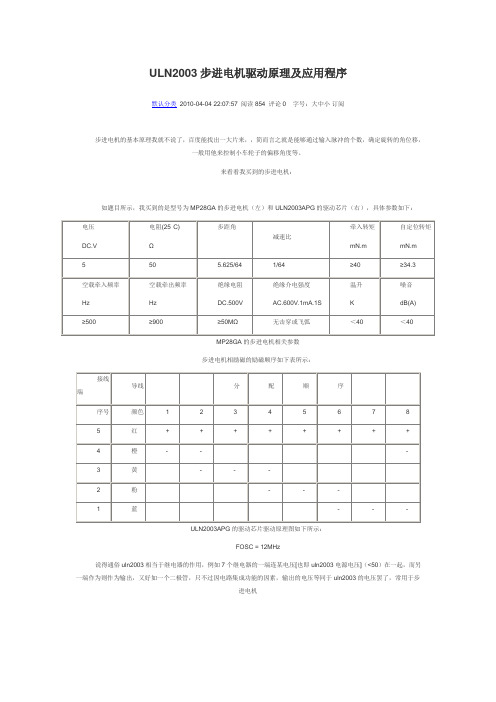
ULN2003步进电机驱动原理及应用程序默认分类2010-04-04 22:07:57 阅读854 评论0 字号:大中小订阅步进电机的基本原理我就不说了,百度能找出一大片来,,简而言之就是能够通过输入脉冲的个数,确定旋转的角位移,一般用他来控制小车轮子的偏移角度等。
来看看我买到的步进电机:如题目所示,我买到的是型号为MP28GA的步进电机(左)和ULN2003APG的驱动芯片(右),具体参数如下:MP28GA的步进电机相关参数步进电机相励磁的励磁顺序如下表所示:;--------------------------------------------------; 步进电机的驱动信号必须为脉冲信号转动的速度和脉冲的频率成正比; 本步进电机步进角为5.625度 . 一圈360 度, 需要64个脉冲完成;--------------------------------------------------; A组线圈对应P2.4; B组线圈对应P2.5; C组线圈对应P2.6; D组线圈对应P2.7; 正转次序: AB组--BC组--CD组--DA组(即一个脉冲,正转5.625度);------------------------------------------------ORG 0000HLJMP MAINORG 0100HMAIN:;----------------------------正转MOV R3,#192 ;正转3圈共192个脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START ;对A的判断,当A=0时则转到STARTMOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转MOV R3,#64 ;反转一圈共64个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAIN;---------------------------转速控制DELAY: MOV R7,#40 ;步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RET;---------------------------延时控制DELAY1: MOV R4,#20 ;2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RET;---------------------------正反转表TABLE:DB 30H,60H,0C0H,90H; 正转表DB 00; 正转结束DB 30H,90H,0C0H,60H; 反转表DB 00; 反转结束END/**************************************/ /*杭州电子&计算机工作室*//* *//*步进电机演示程*//*目标器件:AT89S51 *//*晶振:11.0592MHZ *//*编译环境:Keil 7.50A *//****************************//*************包含头文件*******/#include <reg51.h>/**************端口定义****************/sbit key = P1^4;/*********************************函数功能:延时子程序入口参数:出口参数:*****************************************/void delay(void){int k;for(k=0;k<500;k++);}/*************************************函数功能:主程序入口参数:出口参数:********************************/void main(){P1=0x00; //输出全高key=1; //按键置输入状态while(1) //主循环{if(key==1) //无键按下正转{P1=0xFC; //1100delay();P1=0xF6; //0110delay();P1=0xF3; //0011delay();P1=0xF9; //1001delay();}else //有键按下反转{P1=0xFC; //1100delay();P1=0xF9; //1001delay();P1=0xF3; //0011delay();P1=0xF6; //0110delay();}}}1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
几款uln2803的应用电路及驱动电路

几款uln2803的应用电路及驱动电路uln2803应用电路一:AVR单片机AT90S8515共有4个并行8位口,A口、B口、C 口、D口。
由于AT90S8515需要用+5V直流电压供电,每个并行口引脚输出最大电压不超过5V,输出电流最大为20mA[3],但35BYJ46型四相八拍电机需要12V直流电压供电,因此,从AT90S8515单片机C口输出的信号不足以控制步进电机,所以必须加上驱动电路(即ULN2803)。
步进电机控制系统中将AT90S8515C口的高四位PC4-PC7与驱动电路接口芯片ULN2803的A、B、C、D四个引脚相连,经ULN2803驱动放大后输出到35BYJ46型四相八拍步进电机励磁线圈4-1号引脚上,而励磁线圈的5号引脚与驱动电路输出+12V相连。
电路连接如图:uln2803应用电路二:进电机驱动器电路uln2803应用电路三:二相步进电机驱动器电路uln2803应用电路四:LED发光二极管驱动器电路uln2803应用电路五:下图是由8路达林顿反相驱动器ULN2803A(IC1)驱动8只出口继电器的电路连接图。
所使用的继电器是触点功率较大的24V规格,而相应的控制电压为0V/5V,来自下图下部的控制端口PCD—PC70为了实现电平转换,同时能够消除传感器、开关动作干扰的影响,所以使用了两块DIP封装的光电耦合器TLP521-4(IC2、IC3)。
由下图可见,ICI内部已经为每一路达林顿晶体管的集电极(即图3中右侧三极管的集电极,在下图中则是每路反相驱动器的输出端11~18脚)设置了一只二极管,而达林顿晶体管的集电极是开路输出的,只有在负载电源24V与集电极之间连接上负载元件继电器线圈时,达林顿所谓的电流输出才有了通路:只要把集成电路IC1的⑩脚与负载电源24V接通,内部的续流保护二极管自动与继电器线圈并联起来,实现了保护,所以,连接在集成电路外部的继电器线圈无需重复连接保护二极管。
ULN2803中文资料
ULN2802 ULN2803 ULN2804A 8个NPNxx晶体管,连接在阵列非常适合逻辑接口电平数字电路(例如TTL,CMOS或PMOSxx/ NMOS)和较高的电流/电压,如电灯,电磁阀,继电器,打印锤或其他类似的负载,广泛的使用范围:计算机,工业和消费应用。
所有设备功能由集电极输出和钳位二极管瞬态抑制。
该ULN2803
是专为符合标准TTL,而制造ULN2804适合6至15V 的高级别CMOS或PMOSxx。
该电路为反向输出型,即输入低电平电压,输出端才能导通工作。
图一图
1-8:输入端
11-18:输出端
9:地端
10:电源+
图二 ULN2803内部电路图(1/8单元)图二 ULN2804内部电路图(1/8单元)
MAXIMUM RATINGS (TA = 25℃ and rating apply to any one device in the
package, unless otherwise noted.)最大额定值
订购信息
ELECTRICAL CHARACTERISTICS (TA = 25℃, unless otherwise noted)电气特性:
测试图:
图1 图2
图3 图4
图5 图6
图7
图四封装图
应用电路图:
图五步进电机驱动器
图六二相步进电机驱动器
图七 LED发光二极管驱动器电路。
ULN2803 详细问答
ULN2803 达林顿管8组为什么加个二极管有什么作用?具体原理是什么?ULN2803达林顿管IC,一般都是用来驱动功率稍微大一点的被动器件的,而驱动的被动器件里,有很大一部分是感性的,如继电器、马达、电磁阀等,这些感性器件在关断瞬间会产生很高的自感电动势(自感电压),低的10多伏,高的几十伏,甚至几百伏,这么高的电压很容易把ULN2803 达林顿管打坏,甚至打坏电路中的其它元器件,所以需要在感性器件上并联一个二极管,用来续流(就是把那个自感高压放掉),保护IC和其它器件不受破坏,此续流二极管正极接2803输出端(即电感器件的一端),负极接驱动电源(在2803上是10脚,也就是电感器件的另一端)。
2803在内部设计了二极管以后,用户在使用的时候不需要外接二极管,在同时驱动多路器件的时候可以节省PCB空间,节约成本、方便走线。
ULN2803如何工作,及其工作原理,11到18脚能过输出高电平么?ULN2803达林顿管IC,也就是大功率三极管,使用时和三极管控制电路差不多,加二极管是为了控制感性负载如继电器,步进电机,电磁阀等设备,反向电动势瞬间击穿ULN2803达林顿管,提供一个泄放通路。
如果控制感性负载,最好并一个二极管在感性负载两端,以防止击穿ULN2803。
ULN2803达林顿管IC内部含8个达林顿三极管。
1---8脚低电平控制输出,8个达林顿三极管你可以看作是8个P型三极管来用,9脚接地,10脚接VCC电源正极,11---18接控制的负载一端,负载另一端接VCC电源正极。
2803应该是输入高电平有效吧,在输出端加一个三家管翻转一下不就可以了吗,然后集电极加6.5伏左右从三家管的发射机就可以取到约6伏的电压点啊。
如果你是说让2803直接输出,控制6负的继电器,那就简单啊,只要输出端的COM脚跟继电器一脚都接6伏供电。
然后继电器另一个脚接对应的2803控制输出。
ULN2803是八重达林顿,1 至8脚为8路输入,18 到11脚为8路输出。
ULN2803中文资料
ULN2802 ULN2803 ULN2804A 8个NPN达林顿晶体管,连接在阵列非常适合逻辑接口电平数字电路(例如TTL,CMOS或PMOS上/ NMOS)和较高的电流/电压,如电灯,电磁阀,继电器,打印锤或其他类似的负载,广泛的使用范围:计算机,工业和消费应用。
所有设备功能由集电极输出和钳位二极管瞬态抑制。
该ULN2803是专为符合标准TTL,而制造ULN2804适合6至15V的高级别CMOS或PMOS上。
该电路为反向输出型,即输入低电平电压,输出端才能导通工作。
图一引脚图
1-8引脚:输入端
11-18引脚:输出端
9引脚:地端
10引脚:电源+
图二ULN2803内部电路图(1/8单元)图二ULN2804内部电路图(1/8单元)
MAXIMUM RATINGS (TA = 25℃and rating apply to any one device in the package, unless otherwise noted.)最大额定值
订购信息
测试图:
图1 图2
图3 图4
图5 图6
图7
图四封装图
应用电路图:
图五步进电机驱动器
图六二相步进电机驱动器
图七LED发光二极管驱动器电路。
uln2803步进电机的控制原理电路图和源程序
uln2803步进电机的控制原理电路图和源程序步进电机的控制原理和程序选自北航出版耿德根主编《高速嵌入式单片机原理与应用》第七章7.4.2源程序:SLAVR742.ASM自从六十年代初期步进电机面世以来,在过去几年它的重要性大大提高了。
它用来驱动时钟和其他采用指针的仪器,打印机、绘图仪、磁盘光盘驱动器、各种自动控制阀、各种工具,还有机器人等的机械装置。
关于马进电机工作原理请参考有关资料。
下面用单极1-2相激磁方法步进电机做实验,即1极、2极、1极、2极、....极以次循环,如何用单极二相激该方法控制步进电机,由读者或用户自行编制程序实验。
;实验选用4.5V步进电机,用5V即可,实验时节省一组步进电机驱动电源;;型号:MA82135; 相数:2相; 电压:4.5V; 电流/相:0.12A; 电阻欧姆:34Ω/相; 重量:30g;*********************************************;* 步进电机控制程序(单极1-2相) *;* *;*SLAVR742.ASM *;*use ULN2803 ;使用PC0-PC3 驱动步进电机*;*use 11-17new bord *;*********************************************.include"8515def.inc".def temp =r16.def dt =r19.def np =r17.def step =r18.def TStep =r20.def cnt =r21.equ turntab=0x0200.org $0000rjmp RESET.cseg.org 0x010RESET:ldi temp,low(RAMEND) ;设堆栈out SPL,templdi temp,high(RAMEND)out SPL+1,tempser TEMP ;C口设置为输出OUT ddrc,TEMPldi zl,low(turntab*2) ;步进电机旋转资料指针ldi zh,high(turntab*2)ldi np,4ldi temp,$44out portc,temp ;初始化ldi TStep,$25rcall delayldi cnt,10cltrep: ldi step,192ldi TStep,1 ;1--255rcall turndec cntbrne reploop: noprjmp loop;************************************************************* ; t=1 uncircle turn ;T=1逆时针转*; t=0 circle turn ;T=0顺时针转*; 96 step a turn *; TStep is time of a step ; *;*************************************************************turn: brts uncircle ;判转向inc np ;正转cpi np,8brne nextclr npnext: push zladd zl,nplpmout portc,r0pop zlrcall delaydec stepbrne turnretuncircle: ;反转dec npcpi np,$ffbrne nextldi np,$07rjmp nextdelay: push TStep ;延时子程序del1: ldi dt,70del2: push dtdel3: dec dtbrne del3pop dtdec dtbrne del2dec TStepbrne del1pop TStepret.org turntab; 0 1 2 3 4 5 6 7 ;步进电机旋转资料表.db 0x11,0x99,0x88,0xcc,0x44,0x66,0x22,0x33#i nclude<reg51.h>#define uint unsigned int#define uchar unsigned char#define ms *77// f = 12 M#define LEDLen 4#define Dj_star() {IE=0x81; pri_dj=0; }#define Dj_stop() {IE=0x00; pri_dj=1; P1=0xff; shache="0"; delay(800ms); delay (800ms);delay(400ms); shache = 1; }#define Chilun_Num 8/* 齿轮数 8 个*/#define set_display_num() { LEDBuf[0] = tmp / 1000; LEDBuf[1] = tmp / 100 % 10; \LEDBuf[2] = tmp / 10 % 10; LEDBuf[3] = tmp % 10; }uchar LEDBuf[LEDLen] = {0,0,0,0};void read_num (); /* 读播码盘到 set_round_ num * 8 */void display ();void delay(uint delay_time) { uint i; for (i=0; i < delay_time ; i+ +) ; }void run ();void fx_run();uint round_num = 0; /* 记录已转的齿轮数 , 中断1次加 1*/uint set_round_num = 0; /* 播码盘设置圈数 */uint set_pwm_width = 0; /* 播码盘设置步进电机正向速度 */bit one_round_flg = 0;sbit led_1000 = P0^7; //use for displaysbit led_100 = P0^6; //use for displaysbit led_10 = P0^5; //use for displaysbit led_1 = P0^4; //use for displaysbit key_start = P3^0;sbit key_puse = P3^0;sbit key_clear = P3^1;/* P 3^2 接齿轮传感器中断 */sbit bujin_zx_stop = P3^3; /* 接步进电机 ,正向到位传感器 ,为 0 停机 */sbit bujin_fx_stop = P3^4; /* 接步进电机 ,反向到位传感器 ,为 0 停机 */sbit shache = P3^5; /* 接刹车控制继电器 0 电位有效 */sbit pri_dj = P3^6; /* 接主电机控制继电器 0电位有效 */void main(){TCON = 0x01;display();while(1) {IE="0x00";round_num = 0;display();if ( bujin_fx_stop ) fx_run();while ( key_start );delay ( 8ms );if(!key_start){read_num();//set_round_num = 8;while ( !key_start );run ();fx_run();}}}void run () {#define Delay_time 180/* 转一圈 50 次循环,每循环 4 步,50 * 4 = 200 , 200 * 1。