方向公差及公差带
形状、位置公差带的定义和图例说明

形状、位置公差带的定义和图例说明直 线 度a. 在给定平面内的公差带定义——公差带是距离为公差值t 的两平行直线之间的区域。
b. 在给定方向上的公差带定义——当给定一个方向时,公差带是距离为公差值t 的两平行平面之间的区域;当给定互相垂直的两个方向时,公差带是正截面尺寸为公差值t 1×t 2的四棱柱内的区域。
c. 在任意方向上的公差带定义——公差带是直径为公差值t 的圆柱面内的区域。
平 面 度公差带定义——公差带是距离为公差值t 的两平行平面之间的区域。
圆 度公差带定义——公差带是在同一正截面上半径差为公差值t 的两同心圆之间的区域。
圆 柱度公差带定义——公差带是半径差值t 的两同轴圆柱面之间的区域。
线轮廓度公差带定义——公差带是包络一系列直径为公差值t 的圆的两包络线之间的区域,诸圆圆心应位于理想轮廓线相对基准有位置要求时,其理想轮廓线系指相对基准为理想位置的理想轮廓线。
面轮廓度公差带定义——公差带是包络一系列直径为公差值t 的球的两包络面间的区域,诸球球心应位于理想轮廓面上。
注:当被测轮廓面相对基准有位置要求时,其理想轮廓面系指相对于基准为理想位置的理论轮廓面。
平 行 度a. 在给定的方向上的公差带定义——当给定一个方向时,公差带是距离为公差值t ,且平行于基准平面(或直线、轴线)的两平行面之间的区域;当给定相互垂直的两个方向时,是正截面尺寸为公差值t1×t2,且平行于基准轴线的四棱柱内的区域。
b. 在任意方向的公差带定义——公差带是直径为公差值t ,且平行于基准轴线的圆柱面内的区域。
垂直度a. 在给定方向上的公差带定义——当给定一个方向时,公差带是距离为公差值t,且垂直于基准平面(或直线、轴线)的两平行平面(或直线)之间的区域;当给定两个互相垂直的方向时,是正截面为公差值t1×t2,且垂直于基准平面的四棱柱内的区域。
b. 在任意方向上的公差带定义——公差带是直径为公差值t,且垂直于基准平面的圆柱面内的区域。
公差原则
Ø0.1 M
0.4 0.3 0.1 -0.3 -0.2 Ø19.7 Da/mm
ø20(dM) Ø 20.1(dMV)
最大实体要求应用实例(二)
如图所示,被测轴应满足下列要求: 实际尺寸在ø11.95mm~ø12mm之内; 实际轮廓不得超出关联最大实体实效边界,即关联体外作用尺寸不大 于关联最大实体实效尺寸dMV=dM+t=12+0.04=12.04mm 当被测轴处在最小实体状态时,其轴线对A基准轴线的同轴度误差允 许达到最大值,即等于图样给出的同轴度公差( ø 0.04 )与轴的尺 寸公差(0.05)之和( ø 0.09 )。 0
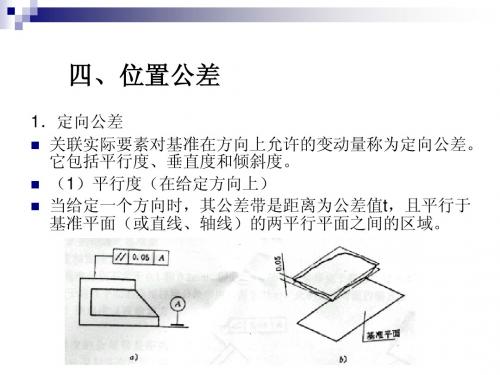
(3)倾斜度(在给定方向上)
倾斜度的公差带是距离为公差值t,且与 基准平面(或直线、轴线)成理论正确 角度的两平行平面(或直线)之间的区 域。
2.定位公差
关联实际要素对基准在位置上允许的变动量称为 定位公差。它包括同轴度、对称度、位置度。 (1)同轴度 同轴度的公差带,是直径为公差值t,且与基准轴 线同轴的圆柱面内的区域。
最大实体要求 轴 孔
dm≤dMMVS=dMMS+t形位 dmin≤da≤dmax Dm≥DMMVS=DMMS-t形位 Dmin≤Da≤Dmax
孔
边界尺寸为最大实体尺寸 MMS(dmax,Dmin)
边界尺寸为最大实体实效尺寸 MMVS=MMS±t
标注
单一要素
在尺寸公差带后 加注 E
用于被测要素 时
在形位公差框格第二格 公差值后加 M
4、最大实体状态(尺寸、边界)
最大实体尺寸(Maximum Material Size, MMS):实际要 素在最大实体状态下的极限尺 寸。 (轴的最大极限尺寸dmax,孔 的最小极限尺寸Dmin) 最大实体边界:尺寸为最大实 体尺寸的边界。
公差带详解
两平行平面
美国和 GM 旧 标准用 S 表示 独立原 则。
圆跳动
圆跳动是一种测量方法,本无公差带而言。为了标准内容的一 致性,人为的定义了公差带。 a) 径向圆跳动:公差带为在任一垂直于基准轴线的横平面内,半 径差等于公差值 t 、圆心在基准轴线上的两同心圆所限定的区域。
t tA
A 两同心圆
b) 轴向(端面)圆跳动:公差带为与基准轴线同轴的任一半径 的圆柱截面上,间距等于公差值t 的两圆所限定的圆柱面区域。
b) 轴向(端面)全跳动:公差带为间距
等于公差值t,垂直于基准轴线的两平行
平面所限定的区域。
t
tA
A
tA
2.3 方向和位置 Orientation & Location 公差带的方向和位置可以是固定的,也可以是浮动的。如被测
要素相对于基准的方向和位置关系是用理论正确尺寸标注的,则公 差带方向和位置是固定的,否则就是浮动的。
一组两平行平面
两组相互垂直的两平行平面
直线度(3) 任意方向
平面度
一个圆柱
两平行平面
圆度 两同心圆
圆柱度
两同轴圆柱 从理论上分析,圆柱度即控制了正截面方向的形状误差,又控 制了纵截面方向的形状误差。但目前还难以找到与此相配的测量方法。
22±0.1 20
线轮廓度(1)
0.4
理想轮廓 线的位置可以 在相应的尺寸 公差(22±0.1) 范围内 浮动。
当线轮廓度带 基准成为位置公差 时,则公差带将与 基准有方向或/和 位置要求。
面轮廓度(1)
0.4
SR
采用面轮廓度 首先必须将其理想 轮廓线标注出来, 因为公差带形状与 之有关。
两法向等距 0.4的曲线 区域
形位公差与公差带
4-5
4-5
(3)跳动误差检测要点:
• 1)圆跳动检测准确方便,可用于控制同轴度误差及圆度误差的影 响,但不可用圆跳动代替端面与轴线的垂直度测量,以防降低精 度要求。 • 2)径向全跳动可控制工件的圆度、圆柱度及同轴度误差。 • 3)轴向全跳动可综合控制工件的垂直度误差及端面的平面度误差。
4-6
4-1
2、形位公差各项目的含义
(1)形状公差定义: 单一实际要素的形状所允许的变动全量。 (2)位置公差的定义: 关联实际要素的位置对基准所允许的变动量。
4-1
公差
特征 直线度 平面度
符号
有或无基准要求 无 无 无 无 有 有 有 有 有 无或有
形状公差
圆度 圆柱度 平行度
方向公差
垂直度
倾斜度
线轮廓度 面轮廓度 位置公差 位置度
1、当同一被测要素有多项形位公差要求,其标注方法又一致时, 可以将这些框格重叠绘制,并用一根指引线引向被测要素。
4-1 2、不同被测要素有同一公差要求时,可以在同一指引线上 绘制多个指示箭头分别引向各被测要素。
4-1 3、结构和尺寸都相同的几个被测要素,有相同的形位公差要求时, 可只对其中的一个要素进行标注,但应在该框格的上方说明被测 要素的数量。
4-1
一、零件的几何要素
零件的几何要素可按不同的方式进行分类:
(一) 按存在的状态分
1.理想要素 具有几何学意义的要素,即几何的点、线、面,不存在任何误差。 2.实际要素 零件上实际存在的要素,通常用测得的要素来代替。
4-1
(二)按结构特征可分:
1、组成要素: 构成零件外廓,直接为人们 所感觉到的点、线、面各要素。
量为最小。
•这是评定形状误差的基本原则。
GB1182 2008(2) 产品几何技术规范 几何公差形状、方向、位置和跳动公差标注
图107
图108
49
线对基准线的倾斜度公差(18.11.1)
图109
图110
50
线对基准面的倾斜度公差(18.11.2)
图111
图112
51
线对基准体系的倾斜度公差 (18.11.2)
图113
图114
52
面对基准线的倾斜度公差(18.11.3)
图115
图116
53
面对基准面的倾斜度公差(18.11.4)
图102
45
线对基准体系的垂直度公差(18.10.2)
图96
图97
给定一个方向
46
线对基准体系的垂直度公差(18.10.2)
图98 图99
图100
给定两个相互垂直方向
(图98与图99应合并为宜)
47
面对基准面的垂直度公差(18.10.5)
图105
图106
48
线对基准线的倾斜度公差(18.11.1)
14
给定平面内的直线度公差 (18.1)
图57
图58
15
给定平面内的直线度公差
(GB/T 1182-1996)
16
圆柱面素线直线度的测量
17
给定方向的直线度公差 (18.1)
图59
图60
18
浮动的直线度公差带
19
任意方向的直线度公差带 (18.1)
图61
Hale Waihona Puke 图6220平 面 度 公 差 (18.2)
图87
空间线
36
线对基准体系的平行度公差(18.9.4)
图88
图89
平面线
37
线对基准体系的平行度公差(18.9.1)
公差的种类及公差带的定义

圆跳动公差
公差带的定义栏中 使粗用 线的 或线 破含 折义 线如 :形体 一点细 线:中心线 粗点线 :基准 二点细 线:补充的投影面 或截面 细的实线或破折 线:公差带 二点 粗线:物体在补充 的投影面或截面的 投影
全跳动公差
公差带的定义 限制实际直线对理想直线直与不直的一项指标
在表示公差带的数值前,如果 有φ符号,则该公差带为直径 t的圆柱中之区域。
有关尺寸线对齐.
用来控制零件上被测要素(平面或直线)相对于
基准要素(平面或直线)的方向偏离90°的要 求,即要求被测要素对基准成90°。
在表示公差带的数值前带有φ 符号时,则该公差带则为垂直 于基准平面的直径t的圆柱内 的区域。
用来控制零件上被测要素(平面或直线)相对于
基准要素(平面或直线)的方向偏离某一给定角 公差带是相对基准平面倾斜一
指示线的箭头所表示的圆柱面半径方向的振 荡,是在围绕基准轴直线A-B旋转一周后,必 须在垂直于基准轴直线的任意测定平面上, 不能超过0.1mm。
指示线的箭头所表示的圆柱面半径方向的振 荡,是在围绕基准轴直线A-B旋转一周后,在 圆柱表面上的任意点上不能超过0.1mm。
用来控制理论上应该同轴的被测轴线与基准轴线 符号时,则该公差带是以基准
的不同轴程度。
轴为轴线的直径t的圆柱内的
区域。
一般用来控制理论上要求共面的被测要素(中心 公或轴线)与基准要素(中心平面、 称配置,彼此相距t的2个平面
中心线或轴线)的不重合程度。
之间的区域。
用来控制被测实际要素相对于其理想位置的变动 量,其理想位置由基准和理论正确尺寸确定。
公差的种类 直线度公差
符号
平面度公差
形状公差 (通常其框 格有两个, 分别注明形 状公差的符 号和数值)
机械测量技术-几何公差形状、方向、位置和跳动公差
第四章 几何公差 形状、方向、位置和跳动公差
二、形位公差项目及符号 国家标准规定了14项形位公差,其名称、符号以及分类见表4⁃1。
表4-1 形位公差的分类与基本符号(GB/T 1182—2008)
第四章 几何公差 形状、方向、位置和跳动公差
三、形位公差的意义和要素 对产品的功能要求,除尺寸公差外,还要对产品的形位公差提出
态,且其对应中心要素的形状或位置误差等于图样上标注的形位公差时 的综合极限状态。
最大实体实效状态对应的体外作用尺寸称为最大实体实效尺寸MMVS。 轴和孔的最大实体实效尺寸分别用符号dMV和DMV表示。 dMV= dmax+t M DMV=Dmin-t M
• 6、最小实体实效状态和最小实体实效尺寸 最小实体实效状态MMVC是指实际要素在给定长度上处于
要求。 1)公差带的形状常用的有9种,见表4-2。 2)公差带的大小指公差带的宽度t或直径ϕt,如表4-2中所示,t即公差 值;取值大小取决于被测要素的形状和功能要求。 3)公差带的方向即评定被测要素误差的方向。 4)公差带的位置,形状公差带没有位置要求,只用来限制被测要素 的形状误差。
第四章 几何公差 形状、方向、位置和跳动公差
(2)实际(组成)要素。由接近实际(组成)要素所限定的工件实际 表面的组成要素部分。 如图(b)所示。 实际(组成)要素是实际存在并将整个工件与周围介质分隔的要素。它由
无数个连续点构成,为非理想要素。
几何要素定义之间的相互关系
4.提取组成要素与提取导出要素 (1)提取组成要素。按规定方法,由实际(组成)要素提取有限数目 的点所形成的实际(组成)要素的近似替代,如图(c)所示。 (2)提取导出要素。由一个或几个提取组成要素得到的中心点、中心 线或中心面,如图(c)所示。 提取(组成、导出)要素是根据特定的规则,通过对非理想要素提取
公差配合与测量技术 第11将 方向公差与方向误差
形状:两平行平面 大小:间距为公差值 方向:平行于基准平面
动画:9.2线对面平行度.swf
一、方向公差与公差带
“线对面”的平行度:测量
(1)一个方向 被测要素:两孔公共轴心线,用可胀心轴体现。 基准要素:底面,放在测量平台上体现。
一、方向公差与公差带
测量“公共轴线”对底面的平行度误差
一、方向公差与公差带
1、平行度——限制实际要素对基准在平行方向上变动量的一项指标。
• 1)“面对面”的平行度
形状:两平行平面
• 被测要素:上平面; 基准要素:底面。
大小:间距为公差值
方向:平行于基准平面
t
a)标注 动画:9.1面对面平行度.swf
基准平面 b)公差带
一、方向公差与公差带
2)“线对面”的平行度 • 被测要素:公共轴线; 基准要素:底面。
方向公差与公差带
基准
在位置公差中,基准是指基准要素,被测要素的方向或(和)位置是由基准确定的。
在位置公差中,基准是一项非常重要的指标,是确定被测要素公差带方位的根据。
但基准实际要素本身也有形状误差,因此,由基准实际要素建立基准时,应以该 基准实际要素的理想要素为基准,理想要素的位置也要符合最小条件。
01
方向公差包括平行度、 垂直度、倾斜度、线轮 廓度和面轮廓度五项。 但线轮廓度和面轮廓度 前面已分析,这里不作 重复讲解。
02
方向公差中被测要素相 对基准要素为线对线或 线对面时,可分为给定 一个方向,给定相互垂 直的两个方向和任意方 向上的三种。
03
一、方向公差与公差带
方向公差:被测要素相对基准要素都有线对线、线对面、面对面和面对线等四种情况。
基准(续1)
公差的分类
Tyco/AMPTeam-D QA Page 1国家标准规定的形状公差的特征项目分为形状公差和位置公差两大类,共14 个,它们的名称和符号如下表所示。
Tyco/AMPTeam-D QA Page 2形位公差的定义直线度-所有点都在一条直线上的情况,公差由两条平行线形成的区域来指定平面度-表面上所有的点都在一个平面上,公差由两个平行平面形成的区域来表示。
圆度-表面上所有点都在圆周上。
公差由两个同心圆限制的区域来指定。
圆柱度-旋转表面上的所有点都与公共轴等距。
圆柱公差制定了两个同心圆柱所形成的公差区域,此旋转表面必须在此区域中。
轮廓度-控制不规则的表面、线条、弧形或普通位面的定义公差方式。
轮廓可适用于单个线条元件或者零件的整个表面。
轮廓公差指定了沿着实际轮廓的唯一边界。
倾斜度-表面与轴处于指定角度的情况(与数据平面或轴的角度不是90度)。
公差区域是由两个平行平面定义的,这两个平行平面与数据平面或轴成指定的基本角度。
垂直度-表面或轴与数据平面或轴成直角的情况。
垂直公差指定了下列情况之一:由垂直于数据平面或轴的两个平面定义的区域,或者由垂直与数据轴的两个平行平面所定义的区域。
平行度-表面与轴上所有点与数据平面或轴等距的情况。
平行度公差指定了下列情况之一:平行于数据平面或轴的两个平面或线定义的区域,或者其轴平行于数据轴的圆柱公差区域。
同轴度-旋转表面的所有交叉可组合元素的轴,是数据特征的公共轴。
同心度公差指定了其轴与数据轴一致的圆柱公差区域。
位置度-位置度公差定义了允许其中中心轴或者中心平面偏离真正(理论上正确)位置的区域。
基本尺寸建立了从数据特征和相互关联的特征之间的真正位置。
位置误差是,特征与其正确位置间,总的可允许的位置偏移量。
对于孔和外部直径这样的圆柱特征来说,位置度公差通常是特征轴必须在其中的公差区域的直径。
对于不是圆的特征(如槽和短小的突出物)来说,位置度公差是特征的中心平面必须在其中的公差区域的总宽度。
方向公差及公差带PPT课件
未来发展方向和挑战
未来发展方向
随着科技的不断发展,未来方向公差及公 差带的研究和应用将更加深入和广泛。研 究方向将包括新型测量技术的开发和应用 、数值模拟和仿真技术的应用、人工智能 和机器学习在方向公差及公差带中的应用 等。
VS
未来挑战
随着制造业的快速发展和变革,方向公差 及公差带的挑战也越来越大。如何提高测 量精度和效率、如何优化数值模拟和仿真 技术的算法和模型、如何提高人工智能和 机器学习在方向公差及公差带中的应用效 果等,都是未来需要面对的挑战。
对行业的展望和建议
对行业的展望
随着制造业的不断发展,方向公差及公差 带的应用前景将更加广阔。未来,方向公 差及公差带将更加智能化、自动化和精细 化,为制造业的发展提供更加精准和高效 的技术支持。同时,方向公差及公差带的 应用领域也将更加广泛,包括汽车、航空 航天、电子等领域。
对行业的建议
为了更好地应用方向公差及公差带技术, 建议行业加强技术研发和人才培养,提高 测量技术和仿真技术的水平,优化算法和 模型,提高应用效果。同时,加强国际合 作和交流,推动方向公差及公差带技术的 全球发展。
方向公差及公差带ppt课件
2023-10-27
目录
• 方向公差概述 • 方向公差符号及标注 • 公差带的概念与计算 • 方向公差的应用场景及案例分析 • 总结与展望
01
方向公差概述
定义与特点
方向公差
在加工和装配过程中,关联要求规定了两个零件相对位置的 准确性和稳定性,即要求限制相关零件在某些方向上的相对 误差。
05
总结与展望
方向公差及公差带的重要性和应用价值
方向公差及公差带的重要性
方向公差及公差带是机械制造领域中的重要概念,对于保证机器零件的精度和性能具有至关重要的作 用。通过控制方向公差及公差带,可以确保机器零件在正确的位置和方向上装配,从而保证机器的整 体性能和精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a —基准轴线
提取(实际)中心线应限 定在平行于基准轴线A、直径等
于公差值φ0.03的圆柱面内。
3)线对基准面的平行度公差
公差带:平行于基准平 面、间距等于公差值t的取(实际)中心线应 限定在平行于基准平面B、 间距等于0.01的两平行平面 之间。
2)线对基准体系的垂直度公差
公差带:间距等于公差值t 的两平行平面所限定的区域。该 两平行平面垂直于基准平面A且 平行于基准平面B。
a —基准平面A b—基准平面B
圆柱面的提取(实际)中心 线应限定在间距等于0.1的两平 行平面之间。该两平行平面垂直 于基准平面A且平行于基准平面B。
3)线对基准面的垂直度公差
1)线对基准体系的平行度公差
公差带:间距等于公差值t、 平行于两基准的两平行平面所限 定的区域。
a— 基准轴线 b— 基准平面
提取(实际)中心线应限定 在间距等于0.1、平行于基准轴 线A和基准平面B的两平行平面之 间。
2)线对基准线的平行度公差
公差带:平行于基准轴线、
直径等于公差值φt的圆柱面所
a— 基准平面
提取(实际)中心线应 限定在间距等于0.08的两平 行平面之间。该两平行平面 按理论正确角度60°倾斜于 基准平面A。
3) 面对基准线的倾斜度公差
公差带:间距等于公差值t 的两平行平面所限定的区域。该 两平行平面按给定角度倾斜于基 准直线。
a—基准轴线
提取(实际)表面应限 定在间距等于0.1的两平行 平面之间。该两平行平面按 理论正确角度75°倾斜于基 准直线A。
5)面对基准线的平行度公差
公差带:间距等于公差值 t、平行于基准轴线的两平行 平面所限定的区域。
a—基准轴线
提取(实际)表面应限定 在间距等于0.1、平行于基准 轴线C两平行平面之间
6) 面对基准面的平行度公差
公差带:间距等于公差 值t、平行于基准平面的两 平行平面所限定的区域。
a—基准平面
提取(实际)表面应限 定在间距等于0.01、平行于 基准D的两平行平面之间。
1)线对基准线的倾斜度公差
公差带:间距等于公差值t的 两平行平面所限定的区域。该两 平行平面按给定角度倾斜于基准 轴线。
提取(实际)中心线应 限定在间距等于0.08的两平 行平面之间。该两平行平面 按理论正确角度60°倾斜于 基准轴线A—B。
a—基准轴线
2)线对基准面的倾斜度公差
公差带:间距等于公差值t 的两平行平面所限定的区域。 该两平行平面按给定角度倾斜 于基准平面。
4)线对基准体系的平行度公差
公差带:间距等于公差 值t的两平行直线所限定的 区域。该两平行直线平行于 基准平面A且处于平行于基 准平面B的平面内。
a—基准平面A b—基准平面B
提取(实际)线应限定 在间距等于0.02的两平行直 线之间。该两平行直线平行 于基准平面A且处于平行于 基准平面B的平面内。
二、方向公差及公差带
1.方向公差 限制被测要素对基准在方向上允许的变动量, 包括平行度、 垂直度、倾斜度线轮廓度和面轮廓度。 2.方向公差带 1)方向公差带相对于基准有确定的方向,而其 位置往往是浮动的。 2)方向公差具有综合控制被测要素的方向和形 状的能力。
(一)平行度
平行度公差有以下几种情况: 线对基准体系的平行度公差 线对基准线的平行度公差 线对基准面的平行度公差 线对基准体系的平行度公差 基准线的平行度公差 面对基准面的平行度公差
4) 面对基准面的倾斜度公差
公差带为间距等于公差值t 的两平行平面所限定的区域。该 两平行平面按给定角度倾斜于 基准平面。
a— 基准平面
提取(实际)表面应限定 在间距等于0.08的两平行平面 之间。该两平行平面按理论正 确角度40°倾斜于基准平面A。
方向公差小结
1)方向公差:被测提取要素对一具有确定方向 的拟合要素的变动量,拟合要素的方向由基准确定。
公差带:直径等于公差值φt、
轴线垂直于基准平面的圆柱面所限 定的区域。
a 基准平面
圆柱面的提取(实际)中心线
应限定在直径等于φ0.01、垂直于
基准平面A的圆柱面内。
3)对基准线的垂直度公差
公差带:间距等于公差值t且 垂直于基准轴线的两平行平面所 限定的区域。
a—基准轴线
提取(实际)表面应限定在 间距等于0.08的两平行平面之间。 该两平行平面垂直于基准轴线A。
4)面对基准面的垂直度公差
公差带:间距等于公差值t、 垂直于基准平面的两平行平面所 限定的区域。
a— 基准平面
提取(实际)表面应限定 在间距等于0.08、垂直于基准 平面A的两平行平面之间。
(三)倾斜度公差
倾斜度公差有以下几种情况:
线对基准线的倾斜度公差 线对基准面的倾斜度公差 面对基准线的倾斜度公差 面对基准面的倾斜度公差
(二)垂直度
平行度公差有以下几种情况: 线对基准线的垂直度公差 线对基准体系的垂直度公差 线对基准面的垂直度公差 面对基准线的垂直度公差 面对基准面的垂直度公差
1)线对基准线的垂直度公差
公差带:间距等于公差值t、 垂直于基准线的两平行平面所 限定的区域。
a—基准平面
提取(实际)中心线应限 定在间距等于0.06、垂直于基 准轴线A的两平行平面之间。
2)方向公差带的方向是固定的,而位置是浮动的。 3)方向公差具有综合控制被测要素的方向和形状。 的能力。如平面的平行度公差可以限制该平面的平面度 和直线度误差;轴线的垂直度公差可以控制该被测(导 出)要素的直线度误差。因此,在保证功能的前提下, 规定了方向公差,一般不再规定形状公差,只有需要对 该要素的形状有进一步要求时,则可同时给出形状公差,但 其公差数值应小于方向公差值。