曲柄滑块机构运动分析与力学计算
偏置曲柄滑块的运动方程式
偏置曲柄滑块的运动方程式
偏置曲柄滑块是一种机械装置,由一个曲柄和一个滑块组成。
曲柄是一个旋转的杆状物体,而滑块是沿着曲柄轨迹移动的物体。
偏置曲柄滑块的运动方程式描述了滑块在不同时间点上的位置。
运动方程式可以通过几何关系和动力学原理推导得到。
下面是一个典型的偏置曲柄滑块运动方程式的示例:
假设曲柄长度为L,曲柄的角速度为ω,滑块的位置为(x, y),滑块与曲柄连接处的角度为θ。
根据几何关系,我们可以得到以下关系式:
x = L*cos(θ)
y = L*sin(θ)
其中,θ的取值范围通常是从0到2π,表示一次完整的旋转。
根据动力学原理,我们可以推导出滑块的加速度与曲柄的角度加速度之间的关系。
假设滑块的质量为m,滑块的加速度为a,曲柄的角加速度为α,那么有以下关系式:
m*a_x = -m*L*α*sin(θ) - m*L*ω^2*cos(θ)
m*a_y = m*L*α*cos(θ) - m*g
其中,g表示重力加速度。
通过解这两个方程,我们可以得到滑块的加速度a_x和a_y,进而求解出滑块的速度v_x和v_y以及位置x和y随时间的变化。
综上所述,偏置曲柄滑块的运动方程式用于描述滑块在不同时间点上的位置。
通过几何关系和动力学原理,我们可以推导出滑块的位置、速度和加速度与曲柄的角度和角加速度之间的关系。
曲柄(导杆)滑块机构设计分析正文.

目录1 引言1.1 选题的依据及意义·························································································(1)1.2 国内外研究概况及发展趋势··········································································(2)1.3 论文主要工作·······························································································(3)2 曲柄(导杆)滑块机构简介····································································(4)3 曲柄(导杆)滑块机构的运动学分析3.1 曲柄导杆滑块机构的运动分析······································································(5)3.1.1 机构装配的条件····················································································(6)3.1.2 建立数学模型·························································································(6)3.1.3 计算机辅助分析及其程序设计······························································(9)3. 2曲柄滑块机构的运动分析3.2.1 机构装配的条件·····················································································(25)3.2.2 建立数学模型·······················································································(25)3.2.3 计算机辅助分析及其程序设计·····························································(27)4 曲柄(导杆)滑块机构实验台装置设计4. 1 实验台结构·································································································(40)4.2 实验台硬件操作说明···················································································(41)4.3 用SolidWorks 2006实现实验台的立体图形················································(42)总结·········································································································(46)参考文献·········································································································(47)致谢·········································································································(48)1 引言1.1 选题的依据及意义1.曲柄(导杆)滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
曲柄滑块机构分析

Fx
A
60
B Fy
求解过程:
第一步:以曲柄1为研究对象进行受力分析,如图 所示:
X方向:F21*cos(60)+Fx+F=0 Y方向:Fy+F21*sin(60)=0 转矩平衡方程:F*OA-F21*OB*sin(60)=0 三个未知量,三个方程,则可求解得到F21,即 曲柄对连杆的作用力。
7
F4 F’x
D.其他情况
13
扩展1:曲柄滑块机构
M B
A C
D
14
扩展2:当杆长发生变化时,弹簧力会发生什 么变化?
D
F
D
F
200 100 B
A
C
500 100 B
A
C
D
F
200 100 B
A
C
15
课后作业2:教材P77,课后习题4
图2-128所示为曲柄导杆机构。已知曲柄长为 a=100mm,曲柄回转中心A与导杆摆动中心C的 距离为b=200mm。曲柄以ω=36(°)/s的角速 度匀速转动。 (1)试建立该曲柄导杆机构的虚拟样机模型。 (2)仿真机构的虚拟样机模型,并测量获取导杆 角度、角速度和角加速度的变化规律; (3)试根据仿真分析结果,计算求取机构的行程 速比系数
16
课后作业1:教材P77,课后习题5
在图2-129所示的对心曲柄滑块机构,已知曲柄为 100cmx10cmx5cm的钢质杆,连杆为200cmx10cmx5cm的用在曲柄上的 驱动力矩为M1=20N.m。 (1)试建立该曲柄滑块机构的虚拟样机模型; (2)请仿真机构的虚拟样机模型,并测量获取滑块3在0s-20s运 动时间内的位移、速度和加速度的变化规律。
曲柄滑块机构分析
曲柄滑块机构的运动分析及应用
机械原理课程机构设计实验报告题目:曲柄滑块机构的运动分析及应用小组成员与学号:泽陆(11071182)柯宇 (11071177)熊宇飞(11071174)保开 (11071183)班级: 1107172013年6月10日摘要 (3)曲柄滑块机构简介 (4)曲柄滑块机构定义 (4)曲柄滑块机构的特性及应用 (4)曲柄滑块机构的分类 (8)偏心轮机构简介 (9)曲柄滑块的动力学特性 (10)曲柄滑块的运动学特性 (11)曲柄滑块机构运行中的振动与平衡 (14)参考文献 (15)组员分工 (15)摘要本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。
最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。
关键字:曲柄滑块动力与运动分析振动与平稳性ABSTRACTThe paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.曲柄滑块机构简介曲柄滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
曲柄滑块力的极值

曲柄滑块力的极值1. 引言曲柄滑块机构是一种常见的机械传动装置,广泛应用于各个行业中。
在曲柄滑块机构中,曲柄和滑块通过连杆相连,通过转动曲柄,可以产生滑块的往复运动。
在这个过程中,曲柄对滑块施加了一个力,并且这个力在不同位置上会有不同的大小。
本文将研究曲柄滑块机构中力的极值问题。
2. 曲柄滑块机构的基本原理曲柄滑块机构由三个基本部件组成:曲柄、连杆和滑块。
其中,曲柄是一个旋转部件,连杆是一个连接部件,而滑块则是一个往复运动部件。
当曲柄旋转时,连杆会随之移动,并通过连接在其上的轴承使得滑块做往复直线运动。
这种运动方式被广泛应用于各种工程领域,例如发动机、压力机等。
3. 曲柄滑块力的计算方法在分析曲柄滑块机构中的力时,我们需要考虑以下几个因素:3.1 曲柄的转动力曲柄的转动力是指曲柄在旋转过程中对连杆施加的力。
根据牛顿第二定律,曲柄的转动力可以通过以下公式计算:F c=I c⋅α其中,F c表示曲柄的转动力,I c表示曲柄的转动惯量,α表示曲柄的角加速度。
3.2 连杆的拉压力连杆在运动过程中会受到拉压力。
根据静力学原理,连杆的拉压力可以通过以下公式计算:F l=F c cosθ其中,F l表示连杆的拉压力,θ表示连杆与水平方向之间的夹角。
3.3 滑块所受合外力滑块在运动过程中还会受到合外力的作用。
合外力可以分解为两个分量:切向分量和法向分量。
切向分量是指与滑块运动方向相切的那个方向上的分量,它决定了滑块所受到的摩擦阻力;法向分量是指与滑块运动方向垂直的那个方向上的分量,它决定了滑块所受到的压力。
4. 曲柄滑块力的极值在曲柄滑块机构中,曲柄和滑块之间存在一个夹角θ,该夹角会影响曲柄对滑块施加的力的大小。
我们希望找到一个使得曲柄对滑块施加力达到最大或最小值的夹角。
为了求解这个问题,我们可以使用微积分中的极值问题求解方法。
具体步骤如下:4.1 建立函数首先,我们需要建立一个与曲柄对滑块施加力有关的函数。
根据前面的分析,我们可以建立以下函数:f(θ)=F l+F f其中,F l表示连杆的拉压力,F f表示滑块所受摩擦阻力。
曲柄滑块机构运动分析与力学计算

一、运动分析
S = Q sin R L ∴ ≈ Q cos ∴ = = ∴ = a
= L
R sin
+
L cos
−
R
cos ) + sin
α α
= ~
− →
L cos
cos
β β
)
R (1 −
α
= R sin =
L (1 −
β
= R L
β
= cos 1 − sin 1 2
λ
(1 − cos 2 α
cos
2 α 2 α )
)
(1 −
α α
λ
λ (1 −
cos
( 1 − cos dS = = dt
λ (1 −
= 2 α
)
dS d α + 1 2 ⋅
ω R sin
2
α
+
1 4
λ
⋅ 2
sin
2 α
σc =
g
设计时扭矩要照此要求
Q
转动副的摩擦 (轴颈摩擦)
力分析
r r r R21 = N 21 + F21
2 2 N 21 + F21 = N 21 1 + f 2
全反力 R21 =
N
Q
R21 − Q = 0 M d − R21 ⋅ ρ = 0
或
M d − F21 ⋅ r = 0
F21 ⋅ r f ρ= = R21 1+ f
→ R21 ⋅ ρ = F21 ⋅ r
Md
ω12
1
O N21
基于Simulink的偏置曲柄滑块机构运动学和动力学分析
中 图 法分 类号
TH1 1 3 . 2 ;
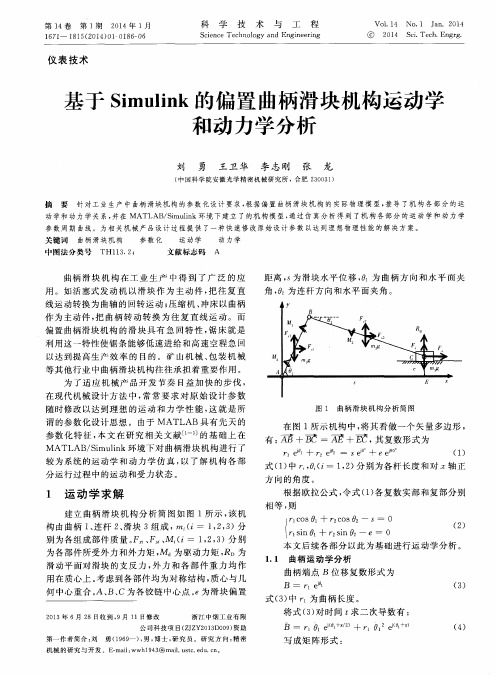
文献标志码A 来自曲柄 滑 块 机 构 在 工 业 生 产 中得 到 了 广 泛 的 应
距离 , S 为 滑块水 平位 移 , 0 为 曲柄方 向和 水 平 面夹 角, 0 。为连杆方 向和水平 面夹 角 。
2 0 1 3年 6月 2 8 日收 到 , 9月 1 1日修 改 浙 江 中烟 工 业 有 限
本 文后 续各 部分 以此 为基础 进行 运动 学分 析 。
1 . 1 曲柄 运 动 学 分 析
曲柄端 点 B位移 复数形 式 为
B — r l e j 1 ( 3 )
式( 3 ) 中 r 为 曲柄 长度 。
写成 矩 阵形式 :
机 械 的 研 究 与 开 发 。E — ma i l : wwh 1 9 4 3 @ ma i l . U S t C . e d u . e n 。
l 期
刘 勇 , 等: 基于 S i mu l i n k的偏 置 曲柄 滑 块 机 构 运 动 学 和 动 力 学 分 析
图1 曲柄 滑 块 机 构 分 析 简 图
在图 1 所 示机 构 中 , 将其 看做 一个矢 量 多边形 ,
有:
+B - O= = =
+蔚 , 其复数形式为
( 1 )
r 1 e j 1+
e J O z— s e j 。 。 4 -e e i 。 。 。
式( 1 ) 中 0 ( 一1 , 2 ) 分别 为各 杆长 度和 对 z轴 正
/ 。 。 1 +r 2 c 。 2 一 0
1 n s i n 0 l 4 - r 2 s i n 0 2 一 e一 0
曲柄压力机曲柄滑块工作机构设计
摘要曲柄压力机广泛应用于冲裁,弯曲,校正,模具冲压等工作。
本次设计的为单点闭式中型,公称压力为160吨曲柄压力机。
此次设计由于分工不同,主要完成的是曲柄压力机曲柄滑块机构的设计。
在设计中主要是根据总体设计确定的压力机主要参数,公称压力,滑块行程等参数参考相关手册初步估算曲柄,连杆,滑块,导轨相关尺寸,然后分别校核,修正,最终确定各零部件尺寸,并根据要求完成装模高度调节装置设计。
最后写出详尽曲柄滑块机构设计说明书,绘出主要零件图。
关键字:公称压力,曲轴,连杆,导轨,调节装置。
AbstractIt was crank press slider crank mechanism design that crank press extensive use to blanking,bent,adjustment,mould stamping quiescent. This degree rated for single-point closed type mesotype skill pressure for 160 ton crank press.This degree design owing to division of labour differ. Mostly finished at design suffer primarily as per overall design final contractor major parameter,nominal pressure,slide stroke is isoparametric reference correlation manual general estimate winch,pitman,slipper rack correlation size,then parting check,amend,ultimately ascertain each spare size,combine or finish fit design up with. be the last written out at large slider crank mechanism design specifications,out major parts chart to.key word:nominal pressure,crankshaft,pitman,rack,regulating block.目录前言………………………………………………………………………..1 曲柄压力机构成及工作原理和相关参数1.1曲柄压力机构成及工作原理……………………………………………..1.1.1曲柄压力机一般有工作部分构成……………………………………1.1.2.曲柄压力机工作原理…………………………………………………1.2 曲柄压力机的主要技术参数…………………………………………….1.2.1曲柄压力机的主要技术参数…………………………………………1.2.2曲柄压力机的型号介绍………………………………………………2 曲柄压力机滑块机构的运动分析与受力分析2.1压力机曲柄滑块机构的构成………………………………………………2.2曲柄压力机滑块机构的运动规律分析……………………………………2.2.1滑块的位移和曲柄转角之间的关系…………………………………..2.2.2滑块的速度和曲柄转角的关系……………………………………….2.3曲柄压力机滑块机构的受力分析…………………………………………2.3.1忽略摩擦情况下滑块机构主要构件的力学分析……………2.3.2考虑摩擦情况下滑块机构主要构件的力学分析……………3 齿轮传动3.1齿轮传动的介绍…………………………………………………………..3.1.1齿轮在应用的过程中对精度要求………………………………….3.2直齿轮传动……………………………………………………………….3.2.1齿轮参数确定3.2.2齿轮的尺寸初步计算3.2.3 齿轮的强度校核3.3锥齿轮传动………………………………………………………………3.3.1几何参数的计算........................................3.3.2 核算弯曲应力..........................................3.4蜗杆蜗轮传动……………………………………………………………3.4.1蜗杆传动的特点.......................................3.4.2蜗杆蜗轮的材料.......................................3.4.3蜗杆蜗轮尺寸的计算...................................3.4.4 校核蜗轮蜗杆..........................................4 曲柄压力机滑块机构的设计与计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
α
λ
sin
α
λ ( λ β λ α
= =
2
0 . 08 1 − sin
2
0 .2 )
2
sin
β
=
1 −
λ
2
sin
2
α
α
cos 2 α cos L 1 4 1 4 ) 2 α )
2
= 1 −
β
S R R V =
1 2 1 4 cos
(1 −
λ
2
(1 −
R (1 − cos
α
) + ) + ⋅
) + L R 1 4 d α dt sin =
λ
(1 − cos 2 α
cos
2 α 2 α )
)
(1 −
α α
λ
λ (1 −
cos
( 1 − cos dS = = dt
λ (1 −
= 2 α
)
dS d α + 1 2 ⋅
ω R sin
2
α
+
1 4
λ
⋅ 2
sin
2 α
→ R21 ⋅ ρ = F21 ⋅ r
Md
ω12
1 = fv ⋅ r
F21
2
ρ
以轴颈中心为圆心,ρ为半径作的圆称为摩擦圆, ρ为摩擦圆半径。
三、实际机构扭矩计算
理想机构:不计弹性变形; 理想机构:不计弹性变形;不计配合间隙 不计摩擦; 不计摩擦;不计惯性力
sin γ = M
' 2
m f = [(1 + λ )R A + λRB + R0 ]µ---摩擦力臂 M = M1 + M 2
在下死点附近 λ = PR sin α + sin 2α + µ (1 + λ )R A + µλRB + µR0 ⇒ M (α , P) 2 α Pg 公称压力; g 公称压力行程 λ M PAC = Pg R sin α g + sin 2α g + m f 2
曲柄滑块机构运动分析与力学计算
一、运动分析
S = ∵ sin R L ∴ ≈ ∵ cos ∴ = = ∴ = a
= L
R sin
+
L cos
−
R
cos ) + sin
α α
= ~
− →
L cos
cos
β β
)
R (1 −
α
= R sin =
L (1 −
β
= R L
β
= cos 1 − sin 1 2
按压力行程计算扭矩作活塞 允许载荷曲线,在任何情况下
λ P R sin α + sin 2α + m f ≤ M pac 2 M pac P≤ λ R sin α + sin 2α + m f 2
四、连杆的校验
M = PAB µRB − PABµ sinγ ⋅ X 压弯组合 PAB ⋅ cosγ M + F W P cosγ PABµRB − PAB µ sinγ ⋅ X = AB + F W ∴σ c ≤ [σ ]
µ (R A + RB )
L ⋅ m2
= PAB
m 2 = µ R A + R sin( α + β + γ )
PAB P µ R 0 + AB µ R 0 = PAB µ R 0 2 2 由于在下死点附近, ,β很小 ϕ M 2 = PAB [µ R A + µ R 0 + R sin (α + β + γ )]
σc =
1
α + λ sin α cos α
λ
2
sin 2 α )
= P AB R (sin α +
λ
2
sin 2 α ) 在下死点
β = 0
2 ∴ M 1 ( P ,α , R , L ) 设计 ( 公称压力
= PR (sin α +
λ
sin 2 α ) ) 行程 S g ; 设计 ( 公称压力 进行计算 . )角 α
g
设计时扭矩要照此要求
Q
转动副的摩擦 (轴颈摩擦)
力分析
R21 = N 21 + F21
2 2 N 21 + F21 = N 21 1 + f 2
全反力 R21 =
N
Q
R21 − Q = 0 M d − R21 ⋅ ρ = 0
或
M d − F21 ⋅ r = 0
F21 ⋅ r f ρ= = R21 1+ f
PAB P = sin(90 + ϕ ) sin(90 − ϕ − β − γ ) cosϕ PAB = P ⋅ cos(β + γ + ϕ )
∴ PAB = P
当α = 0,β = 0 M 2 = P[µR A + µR0 + R sin γ ]
Rµ (R A + RB ) = PµR A + µR0 + L R λ= L M 2 = P[(1 + λ )R A + λRB + R0 ]µ
ω R sin
= dV dt =
α
λ
d α dt
dV d α
ω
R (cos
α
+
λ
cos
2 α
)
二、曲轴扭矩理论计算
P AB = M
1
m 1 = R sin (α + β M
1
P cos β = P AB ⋅ m 1
)
1 − λ 2 sin
2
= P AB R sin( α + β )
sin( α + β ) = sin α cos β + cos α sin β = sin α ≈ (sin α + M