卫星轨道计
卫星轨道计算课件
04
道的定分 析
哈里斯方法
哈里斯方法是一种用于分析非线性动力系统稳定性的数值 方法。在卫星轨道稳定性分析中,哈里斯方法可用于研究 卫星轨道在受到扰动后的稳定性。
该方法通过计算系统的奇异值来确定系统的稳定性,奇异 值越小,系统越稳定。通过比较不同扰动下的奇异值,可 以评估卫星轨道的稳定性。
李雅普诺夫指数方法
优点 适用于各种复杂轨道和扰动,计算速度快。
缺点 需要选择合适的积分方法和步长,对初值敏感。
03
道的力学型
万有引力
万有引力是影响卫星轨道的主要因素 之一,它使得卫星受到地球的吸引, 产生向心加速度,维持卫星在轨道上 运行。
万有引力的大小与两个物体的质量成 正比,与它们之间的距离的平方成反 比,遵循万有引力定律。
数值模拟方法
数值模拟方法是一种通过数值计算来 模拟动态系统行为的方法。在卫星轨 道稳定性分析中,数值模拟方法可用 于模拟卫星轨道在受到扰动后的演化 过程。
VS
通过数值模拟,可以观察卫星轨道在 不同扰动下的变化情况,从而评估卫 星轨道的稳定性。数值模拟方法还可 以用于预测卫星轨道未来的演化趋势, 为卫星轨道设计和优化提供参考。
优点
直观易懂,适用于简单轨 道分析。
缺点
对于复杂轨道和实时计算 不太适用。
动力法
定义
动力法考虑地球引力、太阳辐射 压和其他天体引力扰动等动力因
素,模拟卫星运动。
优点
能够处理复杂扰动,适用于长期轨 道预测。
缺点
计算量大,需要高精度数值方法。
数值法
1 2 3
定义 数值法采用数值积分方法,对卫星运动方程进行 积分求解。
详细描述
无线电观测是一种常用的卫星轨道观测方法,通过接收卫星发射的无线电信号,测量卫星轨道参数,具有全天候、 全天时的特点,但测量精度受信号质量影响较大。
轨道卫星运动位置计算

轨道卫星运动位置计算轨道卫星的位置计算是航天领域中的重要任务之一,它对于实现通信、导航、气象监测等功能起着至关重要的作用。
本文将介绍轨道卫星运动位置计算的基本原理和方法。
一、轨道卫星的运动模型轨道卫星的运动可以用开普勒运动模型来描述。
开普勒运动模型假设行星围绕太阳运动,且太阳是一个质点,不考虑行星之间的相互作用。
同样,我们也可以假设卫星围绕地球运动,且地球是一个质点,不考虑卫星之间的相互作用。
根据开普勒第一定律,轨道卫星围绕地球运动的轨道是一个椭圆。
椭圆的两个焦点分别为地球的中心和轨道中心。
卫星在轨道上运动时,地球的位置可以通过确定轨道的半长轴、半短轴、离心率和轨道的倾角等参数来计算。
二、轨道卫星位置计算方法轨道卫星的位置计算方法主要包括传统方法和现代方法。
传统方法主要是利用开普勒的数值解来计算卫星的位置。
现代方法主要是利用数值计算方法和遥测数据来进行计算。
1.传统方法传统的轨道卫星位置计算方法主要有两种:开普勒法和摄动法。
开普勒法是根据开普勒第三定律和数值解方法来计算卫星的位置。
它首先确定半长轴、离心率和轨道的倾角等参数,然后通过数值积分的方法来模拟卫星的运动,得到卫星的位置和速度。
摄动法是在开普勒法的基础上考虑了一些外力的作用,如地球引力、月球引力和太阳引力等。
这些外力会对卫星的轨道产生一定的影响,通过考虑这些影响可以提高计算的精度。
2.现代方法现代方法主要是利用数值计算方法和遥测数据来计算轨道卫星的位置。
数值计算方法主要是利用数值积分的方法来模拟卫星的运动。
通过数值计算模型,可以根据卫星的初始位置和速度来计算卫星在未来一些时刻的位置和速度。
遥测数据是通过各种测量手段来获取的卫星的相关数据,如卫星的位置、速度和加速度等。
通过分析这些数据,可以获得卫星的运动状态,并进一步计算出卫星的位置。
在实际的轨道卫星位置计算中,通常会结合使用传统方法和现代方法,以提高计算的准确性和稳定性。
三、轨道卫星位置计算的应用轨道卫星的位置计算应用广泛,主要包括通信、导航、气象监测和科学研究等领域。
卫星轨道参数详解
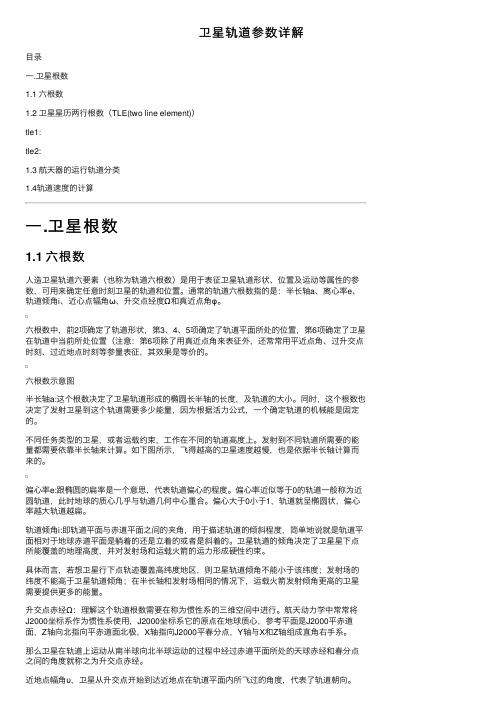
卫星轨道参数详解⽬录⼀.卫星根数1.1 六根数1.2 卫星星历两⾏根数(TLE(two line element))tle1:tle2:1.3 航天器的运⾏轨道分类1.4轨道速度的计算⼀.卫星根数1.1 六根数⼈造卫星轨道六要素(也称为轨道六根数)是⽤于表征卫星轨道形状、位置及运动等属性的参数,可⽤来确定任意时刻卫星的轨道和位置。
通常的轨道六根数指的是:半长轴a、离⼼率e、轨道倾⾓i、近⼼点辐⾓ω、升交点经度Ω和真近点⾓φ。
六根数中,前2项确定了轨道形状,第3、4、5项确定了轨道平⾯所处的位置,第6项确定了卫星在轨道中当前所处位置(注意:第6项除了⽤真近点⾓来表征外,还常常⽤平近点⾓、过升交点时刻、过近地点时刻等参量表征,其效果是等价的。
六根数⽰意图半长轴a:这个根数决定了卫星轨道形成的椭圆长半轴的长度,及轨道的⼤⼩。
同时,这个根数也决定了发射卫星到这个轨道需要多少能量,因为根据活⼒公式,⼀个确定轨道的机械能是固定的。
不同任务类型的卫星,或者运载约束,⼯作在不同的轨道⾼度上。
发射到不同轨道所需要的能量都需要依靠半长轴来计算。
如下图所⽰,飞得越⾼的卫星速度越慢,也是依据半长轴计算⽽来的。
偏⼼率e:跟椭圆的扁率是⼀个意思,代表轨道偏⼼的程度。
偏⼼率近似等于0的轨道⼀般称为近圆轨道,此时地球的质⼼⼏乎与轨道⼏何中⼼重合。
偏⼼⼤于0⼩于1,轨道就呈椭圆状,偏⼼率越⼤轨道越扁。
轨道倾⾓i:即轨道平⾯与⾚道平⾯之间的夹⾓,⽤于描述轨道的倾斜程度,简单地说就是轨道平⾯相对于地球⾚道平⾯是躺着的还是⽴着的或者是斜着的。
卫星轨道的倾⾓决定了卫星星下点所能覆盖的地理⾼度,并对发射场和运载⽕箭的运⼒形成硬性约束。
具体⽽⾔,若想卫星⾏下点轨迹覆盖⾼纬度地区,则卫星轨道倾⾓不能⼩于该纬度;发射场的纬度不能⾼于卫星轨道倾⾓;在半长轴和发射场相同的情况下,运载⽕箭发射倾⾓更⾼的卫星需要提供更多的能量。
升交点⾚经Ω:理解这个轨道根数需要在称为惯性系的三维空间中进⾏。
卫星运动基础与轨道计算
卫星轨道方程:r p
讨论:
1 e cos l
e=0, r=p 即a=b, 轨道为圆
e<1, m inpp,m axp 为椭圆轨道
1e 2
1e
e1,m inp,m ax 为抛物线,卫星飞离地
球e1 ,m in2pp,m ax
1e 2
为双曲线
发射参数与轨道方程的关系
第一、二、三宇宙速度
OMEGA_0= -0.6E+01 ;//100.0/180.0* pi; 点赤经
// 参 考 时 刻 的 升 交
i0=0.958512160302E+00; //30.0/180.0*pi; //参考时刻的轨道倾角
omega_s=-0.258419417299E+01;//50.0/180.0*pi; 点角距
// 近 地
OMEGA_=-0.819426989566E-08; //升交点赤经变率
i_=-0.253939149013E-09;
//轨道倾角变率
Cuc=0.2E-06;
//改正项振幅
Cus=0.912137329578E-05 ;
Crc=0.201875E+03;
Crs=0.40625E+01;
开普勒方程求解
6.求卫星在轨道面的直角坐标系中的坐标
cos
r
sin
0
r
M
ms
近地点
开普勒方程求解
7.轨道面坐标转向升交点为轴
x0 cos
y0
r
sin
z 0 0
w
w
i 升交点
x
春分点
x0
开普勒方程求解
8.卫星在天球坐标系中位置
卫星轨道插值计算公式
卫星轨道插值计算公式卫星轨道插值计算是用来估算在两个已知轨道点之间卫星位置的技术。
轨道插值技术在航天器导航、轨道预报以及地球观测等领域中非常重要。
常用的轨道插值方法包括线性插值、三次样条插值、Kriging 插值等。
线性插值是最简单的插值方法之一,它假设卫星在两个轨道点之间的运动是匀速的。
如果已知卫星在两个不同时间点的位置\( (t_1, \mathbf{r}_1) \) 和\( (t_2, \mathbf{r}_2) \),线性插值可以表示为:\[ \mathbf{r}(t) = \mathbf{r}_1 + \frac{t -t_1}{t_2 -t_1} \left( \mathbf{r}_2 - \mathbf{r}_1 \right) \]其中,\( \mathbf{r}(t) \) 是在时间t 处的卫星位置向量,\( \mathbf{r}_1 \) 和\( \mathbf{r}_2 \) 是已知的轨道位置,t 是插值点的时间,\( t_1 \) 和\( t_2 \) 是已知时间点。
三次样条插值则考虑了卫星轨道的曲线特性,通过对轨道数据进行样条函数拟合,得到一个连续的三次函数,该函数可以精确地通过所有的轨道点,并且具有连续的一阶和二阶导数,从而保证插值结果的平滑性。
Kriging插值是一种统计学方法,它利用了数据的变异性和空间相关性,通过计算最优权重来插值未知的数据点。
Kriging插值适用于地球科学领域中的空间数据插值,也可以用于卫星轨道数据的插值。
在实际应用中,选择哪种插值方法取决于数据的特性和所需的插值精度。
线性插值计算简单,但仅适用于线性变化的场景;三次样条插值和Kriging插值则可以更好地处理非线性变化的数据,提供更平滑的插值结果。
在卫星轨道计算中,通常会根据具体任务需求和数据特性来选择合适的插值方法。
卫星测地知识点总结
卫星测地知识点总结卫星测地学的知识点非常丰富,涉及卫星轨道测量、重力场测量、形状测量、大地测量、地壳运动、地球形状测量等多个方面。
本文将从这些方面进行详细的总结,帮助读者更好地了解卫星测地学的基本知识和应用。
一、卫星轨道测量卫星轨道测量是卫星测地学的基础,它主要用于确定卫星的位置和速度,以及测量地球上不同地点的形状和重力场。
卫星轨道测量可以通过地面测量站和卫星搭载的测量仪器来实现,主要包括跟踪测量、星载测量和卫星激光测量等方式。
1. 跟踪测量跟踪测量是通过地面测量站对卫星进行定位跟踪,以确定卫星的位置和速度。
地面测量站通常采用全球定位系统(GPS)或者干涉测量仪器来进行跟踪测量,通过与卫星交换信号来确定卫星的位置和速度信息。
2. 星载测量星载测量是通过卫星搭载的测量仪器来实现卫星轨道测量,主要包括星载GPS测量、星载微波测量、星载激光测量等方式。
这些测量仪器可以实时获取卫星的位置和速度信息,为地球形状和重力场测量提供基础数据。
3. 卫星激光测量卫星激光测量是通过搭载在卫星上的激光测距仪器来测量地球表面的高程和形状,它可以实现高精度的地表高程测量,并且可以克服传统地面测量的局限性,对于建立数字高程模型和地球形状测量具有重要意义。
二、重力场测量地球的重力场分布对地球的形状和内部结构具有重要影响,因此重力场测量是卫星测地学的重要内容。
重力场测量主要包括重力梯度测量、大地水准测量、卫星引力梯度测量等多种方式,它可以帮助我们了解地球的重力场分布规律,对地质勘探、地震预测等领域具有重要意义。
1. 重力梯度测量重力梯度测量是通过地面重力测量仪器来测量地球不同地点的重力场强度和方向,从而确定地球重力场的分布规律。
重力梯度测量可以帮助我们了解地球的内部结构和矿产资源分布,对于地质勘探和资源开发具有重要意义。
2. 大地水准测量大地水准测量是通过测量地表的高程变化来确定地球重力场的分布规律,它可以帮助我们了解地球上不同地点的垂直形变和地壳运动情况,对于地震预测和环境监测具有重要意义。
全球定位系统原理_卫星轨道运动及坐标计算

无摄卫星轨道
卫星的无摄运动一般可通过一组适宜的参数来描述,称为 开普勒轨道参数或开普勒轨道根数: 轨道的长半径,轨道椭圆偏心率; 这两个参数确定了开普勒椭圆的形状和大小。 近地点角距:轨道平面上,升交点与近地点之间的地心角 该参数表达了开普勒椭圆在轨道平面上的定向。 真近点角:即轨道平面上卫星与近地点之间的地心角距 该参数为时间的函数,确定卫星在轨道上的瞬时位置 轨道面倾角:即卫星轨道平面与地球赤道面之间的夹角 升交点赤经:即赤道面上升交点与春分点之间的地心角 这两个参数确定了卫星轨道平面与地球体之间的相对定向
西南交通大学
卫星坐标计算
(1)平均角速度
(2)规化时刻:
n n0 n
n0
GM a3
n由广播星历获得
tk t t0
t0已知(由广播星历获得),t为GPS周秒
(3)平近点角: M k M 0 n t k
(4)偏近点角: Ek M k e sin Ek (5)真近点角: (6)升交距角:
远地点
地心 近地点
1 2 GM m C = mv ¡ 2 r
西南交通大学
开普勒定律 开普勒第三定律
卫星轨道椭圆长半径的立方与运行周期的 平方之比为一常量 2 Ts 4¼ 2 = a3 GM
平均角速度为n,则n=2π/Ts,长半径确定 后,卫星运行的平均角速度也随之确定 µ ¶1 GM 2 n= a3
卫星坐标计算
• Corrected argument of ascending nod(改正后升交角距)
u k 0 u
• Corrected orbital radius(改正后的轨道向径)
rk a (1 e cosEk ) r
GPS卫星轨道的理论和计算
GPS卫星轨道的理论和计算1.引言GPS全球定位系统是一种利用卫星定位技术实现精确定位和时间同步的全球导航卫星系统,由美国的军方开发,目前已经向全世界开放。
其中,GPS卫星是实现GPS定位的核心部分,而卫星的轨道是卫星运动的基础,也是GPS定位的重要参考基准。
2. GPS卫星轨道的理论GPS卫星运动的物理过程与地球引力和旋转的运动规律密切相关。
GPS卫星的轨道通常是圆形或近似圆形的,但在现实世界中,卫星的轨道呈现为稍微不规则的椭圆形。
GPS卫星成功运行的关键在于,卫星轨道的参数设定和运行稳定性的维持,这些问题都需要靠严密的理论计算处理。
2.1 GPS卫星轨道的类型GPS卫星轨道主要分为两类:中心天球和地球中心。
中心天球轨道不考虑地球的自转和引力等因素,只以恒星为参照物,将GPS卫星的轨道作为一个运行的天体,根据行星运动学的定义和理论计算出卫星的运行轨迹。
而地球中心轨道则更加复杂,它不仅需要考虑恒星引力,还要包括地球引力、地球自转引起的离心效应等因素,这些因素对于卫星的轨迹有着较大的影响。
2.2 GPS卫星轨道计算方法GPS卫星轨道的计算方法比较复杂,需要使用天文学和航空航天学等多个领域的相关知识。
目前,根据GPS卫星运行的特点,卫星轨道的计算主要分为以下两种方法。
2.2.1 斯塔克-德鲁瑟方法斯塔克-德鲁瑟方法也称为SDP4算法,它是一种常用的GPS卫星轨道计算方法。
该方法通过外推算法预测卫星位置,并在每个预报周期内根据实际观测数据进行校正。
SDP4方法的优点是速度快,精度较高,但在某些情况下可能会出现误差。
2.2.2 数值积分方法数值积分方法是一种更加精确的GPS卫星轨道计算方法,它可以模拟卫星运动在地球引力和自转等因素的影响下的完整轨迹。
该方法的优点在于精确度很高,但计算量较大,需要进行多次迭代计算。
3. GPS卫星轨道计算案例以GPS卫星PRN25为例,我们来看看如何进行轨道计算。
3.1 基本信息卫星编号:PRN25发射时间:1987年6月10日升轨期:20分钟轨道高度:20200公里3.2 计算过程我们可以通过卫星计算软件,填入卫星的基本信息,以及需要预测的时间和卫星位置,进行轨道计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
卫星轨道计算
1.轨道根数
如果知道卫星的轨道根数,可以根据它们求出卫星在任一时刻的位置。
1.1 开普勒六参数
卫星的轨道根数包括六个积分常数,如图1,包括,a为轨道长半轴;e为轨道偏心率;i 为卫星运动轨道面与赤道面的夹角;Ω为卫星轨道升交点N的赤道经度(自春分点算起);ω为轨道近地点极角,即轨道平面内升交点到近地点的角度;ζ为卫星过近地点时刻
1. 轨道半长轴,是椭圆长轴的一半。
2. 轨道偏心率,也就是椭圆两焦点的距离和长轴比值。
3. 轨道倾角,这个是轨道平面和地球赤道平面的夹角。
对于位于赤道上空的同步静止卫星来说,倾角就是0。
4. 升交点赤经:卫星从南半球运行到北半球时穿过赤道的那一点叫升交点。
这个点和春分点对于地心的张角称为升交点赤经。
5. 近地点幅角:这是近地点和升交点对地心的张角。
6. 过近地点时刻:卫星位置随时间的变化需要一个初值。
其中i、Ω、ω决定卫星轨道平面和长轴在空间的位置,而a、e、ζ可求出卫星在任何时刻在轨道上的位置。
1.2 TLE卫星星历
TLE两行根数格式如下:
AAAAAAAAAAAAAAAAAAAAAAAA
1 NNNNNU NNNNNAAA NNNNN.NNNNNNNN +.NNNNNNNN +NNNNN-N +NNNNN-N N NNNNN
2 NNNNN NNN.NNNN NNN.NNNN NNNNNNN NNN.NNNN NNN.NNNN NN.NNNNNNNNNNNNNN
以国际空间站为例
ISS (ZARYA)
1 25544U 98067A 06052.34767361.00013949 00000-0 97127-4 0 3934
2 25544 051.6421 063.2734 0007415 308.626
3 249.9177 15.74668600414901
(1)第0行
第0行是一个最长为24个字符的卫星通用名称,由卫星所在国籍的卫星公司命名,如SINOSAT 3。
卫星通用名称与NORAD编号、国际编号都是卫星识别编码。
(2)行号
行号是卫星星历的序列号,如第1行或第2行。
(3)NORAD卫星编号
NORAD卫星编号,又称为NASA编号,SCC编号,是NORAD特别建立的卫星编号,每一个太空飞行器都被赋予唯一的NORAD卫星编号。
NORAD卫星编号由五位数的卫星识别码组成,每一位数都有特定的含义。
如“鑫诺3号”卫星的NORAD卫星编号为31577;遥感2号(YAOGAN 2)卫星的NORAD卫星编号为31490;“长征3号甲”(CZ-3A)为31578。
(4)秘密级别
卫星星历的秘密级别,分为3个的级别,分别用一个字符来表示:
①U 非保密的
②C 机密的
③S 绝密的
(5)国际编号
国际编号是全世界国家使用的一种卫星标识方法,前两位是发射年份,后面是在这一年的发射序号。
如“鑫诺3号”卫星的国际编号是07021A。
“07”表示“鑫诺3号”卫星的发射年份2007年;
“021”表示2007年国际编号的第21次发射;
“A”表示是第一次。
按照国际编号规则,如果一次发射多颗卫星,使用26个英文字母排序,按照A、B、C、D的顺序排列为每个卫星编号;如果超过了26个编号,则使用两位字母,如AA、AB、AC编号。
(6)TLE历时
世界标准时间(UTC,Universal Time/Temps Cordonne),又称为协调世界时。
UTC是从英国国际时间和法国协调时间演变而来。
UTC是以原子时秒长为基础,在时刻上尽量接近于世界时的一种时间计量系统。
UTC使用纪元年的后两位,以及用一个十进制小数表示的一年中的第几日和日中的小数部分。
TLE历时使用UTC,指出了飞行体在确定的平近点离角的最精确的UTC时间。
如“鑫诺3号”卫星的TLE历时为07169.62576014。
“07”表示2007年;
“169.62576014”表示2007年的第169.62576014日。
换算成精确的U.T.C.时间为2007年6月18日02时10分56秒。
(7)平均运动的一阶时间导数
平均运动的一阶时间导数作为一个平均运动的漂移参数,用来计算每一天平均运动的变化带来的轨道漂移,提供给轨道计算软件预测卫星的位置。
两行式轨道数据使用这个数据校准卫星的位置。
(8)平均运动的二阶时间导数
平均运动的二阶时间导数作为一个平均运动的漂移参数,用来计算每一天平均运动的变化带来的轨道漂移,提供给轨道计算软件预测卫星的位置。
(9)BSTAR拖调制系数(地球半径的倒数)
BSTAR拖调制系数,采用十进制小数,适用GP4一般摄动理论的情况下、BSTAR大气阻力这一项,除此之外为辐射压系数。
BSTAR拖调制系数的单位是1/(地球半径)。
(10)美国空军空间指挥中心内部使用
美国空军空间指挥中心内部使用的为1;美国空军空间指挥中心以外公开使用标识为0。
(11)星历编号
星历编号是TLE数据按新发现卫星的先后顺序的编号。
当一个卫星生成了一套新的TLE数据。
在新的TLE数据中,新发现卫星的星历编号按顺序排列,每个数字代表一定意义。
如“鑫诺3号”卫星的星历编号为444。
(12)校验和
校验和是指这一行的所有非数字字符,按照“字母、空格、句点、正号=0;负号=1”的规则换算成0和1后,将这一行中原来的全部数字加起来,以10为模计算后所得的和。
校验和可以检查出90%的数据存储或传送错误。
按十进制加起来的个位数字的校验和,用于精确纠正误差。
第1行或第1行的校验和,就是第1行或第2行的精确纠正误差的数字。
(13)轨道的交角(度数:°)
轨道的交角是指天体的轨道面和地球赤道面之间的夹度,用0~90°来表示顺行轨道(从地球北极上空看是逆时针运行);用90~180°表示逆行轨道(从地球北极上空看是顺时针运行)。
(16)升交点赤经(度数:°)
升交点赤经是指卫星由南到北穿过地球赤道平面时,与地球赤道平面的交点。
降交点是指卫星由北到南穿过地球赤道平面时,与地球赤道平面的交点。
升交点赤经是指从地球的球心点望过去,升空点的赤经坐标。
(17)轨道离心率
轨道离心率是指卫星椭圆轨道的中心点到地球的球心点的距离(C)除以卫星轨道半长轴(A)得到的一个0(圆型)到1(抛物线)之间的小数值。
在TLE格式中没有体现出小数点,但是总是假定有一个小数点在第一个数字之前。
它说明了卫星的轨道椭圆有扁率,以及近地点和远地点的轨道高度。
(18)近地点角距
近地点角距是指在卫星的轨道平面内,从升交点到近地点按照卫星运行方向所走过的角度。
近地点角距的数值是一个范围在0~360°之间的度数。
(19)平近点角
平近点角是指平近点角与真近点角和偏近点角之间的关系,即卫星在椭圆轨道上的瞬间位置。
平近点角通过开普勒方程求得。
平近点角主要用来指示卫星在TLE数据中的特定的TLE历时瞬间时刻的位置。
平近点角的数值是一个范围在0~360°之间的度数。
(20)平均运动
平均运动(n)是指在一个太阳日内(24h),卫星在它的轨道上绕了多少圈。
平均运动的数值可以在每天0到17圈,没有每天超过17圈的稳定的地球卫星轨道。
卫星轨道周期(T)可以通过求平均运动的倒数获得;卫星轨道半长轴可以用平均运动的数值通过开普勒第三定律求得。
开普勒第三定律,又称调和定律:行星绕日一圈时间的平方和行星各自离日的平均距离的立方成正比。
(21)在轨圈数
在轨圈数是指卫星从发射到TLE数据记录的TLE历时之间卫星在轨道上绕行的总圈数。
在轨圈数的最后一位数是小数。
2 MODIS卫星星历下载
北京星地通公司的网页-------/eos_data/可以下载到AQUA卫星的TLE;以及其他相关环境卫星的TLE;
3 卫星计算分析软件
卫星工具集分析软件(STK,Satellite Tool Kit)
AGI卫星星历
Norad卫星运行轨道计算软件
Orbition卫星轨道计算软件
ODTK轨道仿真器
StarCalc星图
4.根据卫星星历计算卫星轨道
TLE适用于NORAD发布的SGP、SGP4、SDP4、SGP8、SDP8模型.较常用的是SGP4、SDP4,SGP4用于近地卫星轨道计算,SDP4用于深空卫星轨道计算。
4.1 SGP4 MODEL
(一) 先计算出原始平均运动和半长轴
(二)初始化参数
如果近地点在98km和156km之间, 常量s变为
如果近地点低于98km, 常量s则为
(XKMPER为BSTER) 如果常量s的值改变, 那么就要用下式替代
(三)计算常量(选取恰当的S常量和常量)
(四)计算大气阻力和引力
当在t-to的纪元时刻内,卫星的近地点小于220km的时候,a和IL的公式可以简化,
和可以不计。
(五)长周期项
将代入开普勒方程进行迭代,设
则有,
其中,
(六)短周期项初始量计算
计算密切轨道要素
计算单位方向向量
其中
(七)卫星位置和速度
位置
速度,参数上面有一个点代表一阶导数;。