PWM逆变器双环控制
三相PWM逆变器新型双闭环控制策略研究
三相PWM逆变器新型双闭环控制策略研究作者:索亚楠张武罗心宇喻景康来源:《科技视界》2015年第07期【摘要】随着逆变器在众多领域越来越重要,而传统的电压电流双闭环控制波形质量和响应速度不高,因此本文对传统方法进行改进,提出了一种新型控制方法,即不需要电感L准确值的电流解耦控制和采用模糊算法设计电压环来实现对输出电压控的稳定控制。
并用MATLAB SIMLIMNK进行仿真建模,实验结果表明此控制策略电压输出波形比较稳定。
【关键词】PWM逆变;无电感;电压模糊控制Resarch on New Double Closed-Loop Controlling Strategy Based on Three-Phase PWM Inverter SUO Ya-nan ZHANG Wu LUO Xin-yu YU Jing-kang【Abstract】With inverter is more and more important in many areas, the traditional voltage current double closed loop control waveform quality and speed of response is not high, so to improve the traditional method, this paper proposes a new control method, which does not need the inductance L accurate value of current decoupling control and fuzzy algorithm design voltage loop to achieve the stability control of the output voltage control. With MATLAB SIMLIMNK simulation modeling, experiment results show that the control strategy of voltage output waveform is stable.【Key words】PWM inverter; Without inductance; Fuzzy of voltage controll0 引言鉴于逆变器在光伏发电等新能源领域的重要性,逆变器输出稳定的电压电流波形称为人们研究的重点。
基于双环控制和重复控制的逆变器研究

基于双环控制和重复控制的逆变器研究摘要:研究了一种基于双环控制和重复控制的逆变器控制技术,该方案在电流环和瞬时电压环之外附加了一个重复控制环。
在实现输出电压解耦和扰动电流补偿后,根据无差拍原理设计的双环控制器使逆变器达到了很快的动态响应速度;位于外层的重复控制器则提高了稳态精度。
该方案在一台基于DSPTMS320F240控制系统的PWM逆变器上得到验证。
关键词:逆变器;双环;无差拍;重复控制引言随着闭环调节PWM逆变器在中小功率场合中的大量使用,对其输出电压波形的要求也越来越高。
高质量的输出波形不仅要求稳态精度高而且要求动态响应快。
传统的单闭环系统无法充分利用系统的状态信息,因此,将输出反馈改为状态反馈,在状态空间上通过合理选择反馈增益矩阵来改变逆变器一对太接近s域虚轴的极点,增加其阻尼,能达到较好的动态效果。
单闭环在抵抗负载扰动方面与直流电机类似,只有当负载扰动的影响最终在输出端表现出来以后,才能出现相应的误差信号激励调节器,增设一个电流环限制启动电流和构成电流随动系统也可以大大加快抵御扰动的动态过程。
瞬时值反馈采取提高系统动态响应的方法消除跟踪误差,但静态特性不佳,而基于周期的控制是通过对误差的周期性补偿,实现稳态无静差的效果,它主要分为重复控制和谐波反馈控制。
本文提出了一种基于双环控制和重复控制的逆变器控制方案,兼顾逆变器动静态效应,另外使用状态观测器提高数字控制系统性能。
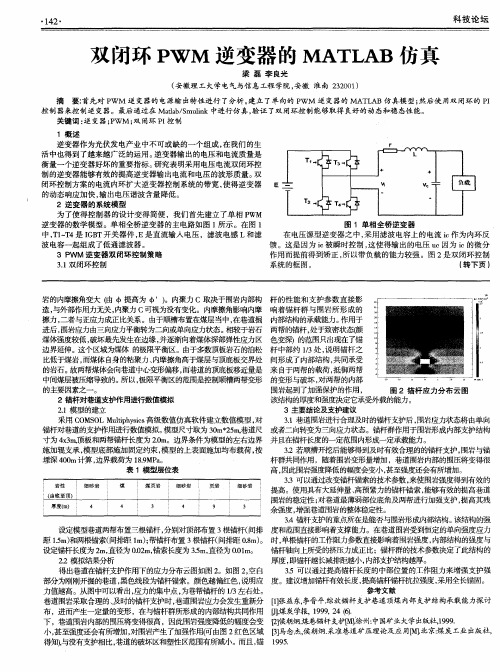
1 逆变器数学模型单相半桥逆变器如图1所示,L是输出滤波电感,C是输出滤波电容,负载任意,r是输出电感等效电阻和死区等各种阻尼因素的综和。
U是逆变桥输出的PWM电压。
选择电感电流iL和电容电压vc作为状态变量,id看作扰动输入,得到半桥逆变器的连续状态平均空间模型为根据式(1),很容易得到逆变器在频域下的方框图,如图2所示。
PWM逆变器的动态模型和直流电机相似,转速伺服系统的设计方法在这里也适用。
本文借鉴直流电机双环控制技术,并改造成为多环控制系统,在逆变器波形控制上取得了很好的效果。
PWM逆变电源数字双环控制技术研究

Research on Dual-loop Digital Control Technique for PWM Inverters
Candidate: Tang Shi Ying Major: Power Electronics and Electric Drive Supervisor: Associate Prof. Peng Li
Keywords:PWM inverter;dual-loop digital control;pole-assignment;observer
II
华中科技大学硕士学位论文
目录
摘要 .................................................................................................................... I Abstract .............................................................................................................. II 1 绪论 1.1 引言 ........................................................................................................(1) 1.2 PWM 逆变电源波形控制技术..............................................................(2) 1.3 本文主要研究内容 ................................................................................(6) 2 PWM 逆变器数字双环控制技术 2.1 SPWM 单相全桥逆变器的数学模型 ...................................................(8) 2.2 单相逆变器数字双环控制技术 ..........................................................(13) 2.3 本章小结 ..............................................................................................(17) 3 观测器的设计 3.1 观测器设计的必要性 ..........................................................................(19) 3.2 观测器的具体设计方法 ......................................................................(21) 3.3 指令误差对状态观测器输出的影响 ..................................................(23) 3.4 带重复补偿的状态观测器 ..................................................................(26) 3.5 本章小结 ..............................................................................................(29) 4 带观测器的单相逆变器数字双环控制 4.1 带观测器的单相逆变器控制系统 ......................................................(31) 4.2 单相逆变器数字双环控制仿真分析 ..................................................(32) 4.3 本章小结 ..............................................................................................(38) 5 实验结果分析 5.1 实验平台介绍 ......................................................................................(39) 5.2 实验结果分析 ......................................................................................(39)
逆变器双闭环控制的限幅问题
逆变器双闭环控制的限幅问题一、概述逆变器是一种将直流电转换为交流电的电气设备,广泛应用于风电、光伏发电等领域。
在逆变器的控制过程中,双闭环控制是一种有效的控制策略,能够提高系统的稳定性和响应速度。
然而,在实际应用中,双闭环控制却面临着限幅问题,该问题不仅会影响逆变器的控制性能,还会导致系统不稳定甚至损坏设备。
解决逆变器双闭环控制的限幅问题对于提高系统的稳定性和可靠性至关重要。
二、逆变器双闭环控制原理逆变器双闭环控制是基于内外环控制的控制策略,内环控制主要是控制逆变器的输出电流或电压,外环控制则是控制输出电压或频率。
双闭环控制能够自动调节逆变器的输出电流或电压以及输出电压或频率,从而实现系统的稳定运行和优化性能。
然而,双闭环控制中存在限幅问题,即在控制过程中输出电流或电压受到一定范围的限制,超出限制范围将会出现问题。
三、逆变器双闭环控制的限幅问题分析1. 输出电流或电压限幅问题:在逆变器的双闭环控制过程中,输出电流或电压可能会受到一定范围的限制,当输出电流或电压超出限制范围时,系统容易出现过载、失稳等问题,从而影响系统的运行和性能。
2. 输出电压或频率限幅问题:双闭环控制中外环控制通常是控制输出电压或频率,当输出电压或频率超出限制范围时,系统可能会出现过压、过频等问题,进而影响逆变器和整个系统的安全运行。
四、解决逆变器双闭环控制的限幅问题的方法1. 设计合理的控制策略:针对逆变器双闭环控制中存在的限幅问题,可通过设计合理的控制策略来解决。
可以采用多级控制结构、合理的参数调节等手段,提高系统的稳定性和控制精度。
2. 优化控制算法:优化控制算法是解决逆变器双闭环控制限幅问题的重要手段,通过改进现有的控制算法或引入新的控制算法,能够更好地应对限幅问题,提高系统的控制性能。
3. 引入限幅保护机制:在逆变器的双闭环控制中引入限幅保护机制,能够及时发现并处理输出电流或电压超出限制范围的情况,有效地保护逆变器和整个系统不受损坏。
双闭环PWM逆变器的MATLAB仿真
3主 要结 论及支 护建 议
采用 C O MS O L M u l t i p h y s i c s 高级数值仿 真软件建立数值模型 , 对 3 . 1巷道围岩进行合理及时的锚杆支护后 , 围岩应力状态将由单向 锚杆对巷道的支护作用进行数值模拟。 模型尺寸取为 3 0 m* 2 5 m , :  ̄道尺 或者二向转变为三 向应力状态。锚杆群作用于围岩形成内部支护结构 寸为 4 x 3 r n ’ 顶板和两帮锚杆长度为 2 . 0 m。边界条件为模型的左右边界 并且在锚杆长度 的一定范围内形成一定承载能力。 施加辊支承 , 模 型底部施加 固定约束 , 模型的上表面施加均布载荷 , 按 3 . 2若顺槽开挖后能够得到及时有效合理的的锚杆支护 , 围岩与锚 埋深 4 0 0 m计算, 边界载荷为 1 8 . 9 MP a 。 杆群共同作用 ,随着围岩变形量增加 ,巷道围岩内部的围压将变得很 表 1模型层位表 高, 因此围岩强度降低 的幅度会变小 , 甚至强度还会有所增加 。 3 . 3可以通过改变锚杆锚索的技术参数 , 来使围岩强度得到有效的 岩性 细砂 岩 煤 煤 页岩 细砂岩 员岩 细 砂岩 提高。使用具有大延伸量 、 高预紧力的锚杆锚索 , 能够有效的提高巷道 ( 由底至顶) 围岩的稳定性; 对巷道最薄弱部位底角及两帮进行加强支护, 提高其残 厚度( m) 4 4 3 4 9 3 余强度 , 增强巷道围岩的整体稳定陛。 3 . 4锚杆支护的重点所在是能否与围岩形成内音 潴 构。 该结构的强 设定模型巷道两帮布置三根锚杆 , 分别对顶部布置 3根锚杆( 间排 度和范围 直接影响着支撑能力 。 在巷道 围 岩受到恒定的单 向强度应力 距1 . 5 m) 和两根锚索( 间排距 l m) ; 帮锚杆布置 3 根锚杆( 间排距 0 . 8 m) 。 时, 单根锚杆的工作阻力参数直接影响着围岩强度 , 内部结构的强度与 设定锚杆长度为 2 m, 直径为 0 . 0 2 m, 锚索长度为 3 . 5 m, 直径为 0 . 0 1 m。 锚杆轴 向上所受的挤压力成正 比;锚杆群的技术参数决定了此结构的 2 . 2模拟结果分析 厚度 , 即锚杆越长减排距越小, 内部支护结构越厚。 得出巷道在锚杆支护作用下的应力分布云图如 图 2 。如图 2 , 空白 3 . 5可以通过提高锚杆长度的中部位置的工作阻力来增强支护强 部分为刚刚开掘的巷道 , 黑色线段为锚杆锚索。颜色越偏红色, 说明应 度。建 曾 加锚汗= 有效长度, 提高锚杆锚杆抗拉强度, 采用全长锚 固。 参考 文献 力值越高。从图中可以看出, 应力的集中点 , 为巷帮锚杆的 1 / 3 左右处 。 巷道围岩采取合理的、 及时的锚杆支护时 , 巷道围岩应力会发生重新分 f 1 1 张益 东, 李晋平. 综放锚杆支护巷道顶煤 内部支护结构承载能力探讨 布,进而产生一定量的变形 ,在与锚杆群所形成的内部结构共同作用 叨. 煤炭 学抿 1 9 9 9 , 2 4 . 2 喉 朝炯. 煤巷锚杆支护口 . 徐州: 中国矿业大学出版社, 1 9 9 9 . 下 ,巷道围岩内部的围压将变得很高 ,因此围岩强度降低的幅度会变 f
SPWM波控制逆变器双闭环PID调节器的建模与仿真
SPWM波控制逆变器双闭环PID调节器的建模与仿真随着电力行业的快速发展,逆变器的应用越来越广泛,逆变器的好坏会直接影响整个系统的逆变性能和带载能力。
逆变器的控制目标是提高逆变器输出电压的稳态和动态性能,稳态性能主要是指输出电压的稳态精度和提高带不平衡负载的能力;动态性能主要是指输出电压的THD(Total Hannonic Distortion) 和负载突变时的动态响应水平。
在这些指标中对输出电压的THD 要求比较高,对于三相逆变器,一般要求阻性负载满载时THD 小于2%,非线性满载(整流性负载)的THD 小于5%.这些指标与逆变器的控制策略息息相关。
文中主要介绍如何建立电压双环SPWM 逆变器的数学模型,并采用电压有效值外环和电压瞬时值内环进行控制。
针对UPS 单模块10 kVA 单相电压型SPWM 逆变器进行建模仿真。
通过仿真,验证了控制思路的正确性以及存该控制策略下的逆变器所具有的鲁棒性强,动态响应快,THD 低等优点。
并以仿真为先导,将其思想移植到具体开发中,达到预期效果。
1 三电平逆变器单相控制模型的建立带LC 滤波器的单相逆变器的主电路结构如图1 所示。
图1 中L 为输出滤波电感,C 为滤波电容,T1,T2,T3,T4 分别是用来驱动IGBT 的三电平的SPWM 波,U0 为输出负载两端的电压。
在建立控制系统的仿真模型时,需要采集负载两端的电压与实际要求的电乐值做比较,然后通过调节器可以得到所需要调节的值。
在此仿真模型中,驱动波形采用的是三电平的SPWM 波形,具体的产生原理在这不做详细描述。
在Matlah 的Simlink 库中SPWM 波的产生如图2 所示,这里调制比设为0.8。
图1 三电平逆变器单相主电路图2 四相SPWM 产生电路。
基于双环控制的PWM 逆变器的研究
图 2 带负载前馈的电感电流内环 电压外环控制系统方框图
( ) ) 根据图 ( ) 可推 导 出 电 感 电 流 内 环 的 开 环 和 闭 环 ! 传递函数 :
3 控制系统极点配置与性能分析
假设电压 、 电流调节器分别为 :
k $ i )= k G s v( $ p+ s k ! i )= k G s i( ! p+ s 经计算得知整个系统的闭环特征方程为 :
$ ( ) & u $ L C S! +r C S +$ 由于这里的等 效 电 阻 r 很 小 , 则逆变器可以近似
压外环电流内环的双环控制方案是高性能逆变电源的
!] 发展方向之一 [ , 双环控制方案的电流内环扩大逆变
u " =
器控制系统的带宽 , 使得逆变器动态响应加快 , 非线性 负载适应能力加强 , 输出电压的谐波含量减小 。
系统的控制器参数按 常 规 方 法 设 计 , 需考虑两个调节 器之间的响应速度 、 频 带 宽 度 的 相 互 影 响 与 协 调 , 控 制器设计步骤复杂 , 还需要反复试凑验证 ; 采用极点配 置方法大大简化了设 计 过 程 , 同时能满足高性能指标 要求 , 这种设计方 法 具 有 明 显 的 优 越 性 。 对 于 这 样 的 高阶系统 , 为了得到所需要的动态性能和稳定性能 , 我 们的处理方法是 : 将其中两个极点配置为一对共轭极 点, 另外两个极点配置在距虚轴很远的地方 。 假设四阶 双 环 控 制 系 统 的 希 望 闭 环 主 导 极 点 为
+] 电 流i 所 以 抗 输 出 扰 动 性 能 比 较 差[ 。为 "的 突 变 ,
$+k r C +C k k! i! ! $ p & p +C + )=s D( s s + s + L C L C
PWM型光伏并网逆变器的双闭环控制系统设计及仿真研究
PWM型光伏并网逆变器的双闭环控制系统设计及仿真研究刘建;冉玘泉【摘要】设计了单相光伏并网系统中PWM型并网逆变器的双闭环控制系统,内环采用固定开关频率直接电流控制,并用典型Ⅰ型系统进行设计.同时,为了使电压型逆变器稳定运行,必须对直流电压进行闭环控制来稳定直流电压.用Matlab/Simulink 中的Power Systems Block建立PWM逆变器双闭环控制系统仿真模型,仿真结果表明,电流有较好的跟随性,直流侧电压有较好的稳定性,该控制系统其能够实现单位功率因素并网,减少谐波分量,提高电能质量.【期刊名称】《电气开关》【年(卷),期】2015(053)005【总页数】5页(P63-66,69)【关键词】光伏并网系统;PWM型逆变器;双闭环控制【作者】刘建;冉玘泉【作者单位】西南交通大学电气工程学院,四川成都610031;西南交通大学电气工程学院,四川成都610031【正文语种】中文【中图分类】TM921随着工业进程的加快,能源消耗越来越大,常规能源供给的有限性和环保压力的增大,促使人类去开发和利用新能源,太阳能具有很多常规能源所不具有的优点,被认为是21世纪最重要的新能源,因而光伏发电被认是综合缓解能源问题和环境问题的一种重要技术途径[1-2]。
逆变器作为光伏发电系统的核心,为了实现高效利用太阳能,对光伏并网发电系统中逆变器的控制方法进行研究具有实用价值。
逆变器并网发电的主要控制问题是使逆变器输出与电网电压同频、同相的正弦波电流,并能跟随并网容量给定值,而且要求电流畸变满足相关要求,控制谐波对电网的不利影响。
目前研究比较成熟的控制方法有滞环控制技术、三角波控制技术,无差拍控制技术等。
滞环控制方法硬件电路十分简单,属于实时控制方式,电流响应很快,不需要载波,输出电压中不含有特定频率的谐波分量[3]。
三角波控制方式输出含有与载波频率相同的高次谐波,且电流响应比瞬时值比较方式慢[4-5]。
无差拍控制[6]可以在有限拍的时间内跟踪到给定的状态变量,具有非常快速的动态响应能力。
新人必看的双环电流型PWM控制器原理简析
新人必看的双环电流型PWM控制器原理简析
PWM控制器对于很多工程师来说,都是在电子电路系统设计过程中不可缺少的重要配件,其中,双环电流型PWM控制器在开关电源以及LED电源设计领域的应用更是非常广泛。
本文将会就这一双环电流型PWM控制器的工作原理和运行特点进行简析,希望能够对新人工程师的日常工作提供一定帮助。
双环电流型PWM控制器工作原理
所谓的双环电流型PWM控制器,其实也是PWM控制器的一种,但这种类型的脉宽调制控制器是在普通电压反馈PWM控制环内部增加了一个电流反馈的控制环节,因此这一元件除了包含电压型PWM控制器的功能外,还能够检测开关电流或电感电流,实现电压电流的双环控制。
一个基础的双环电流型PWM控制器电路原理图如下图图1所示。
图1 双环电流型PWM控制器原理图
从图1所提供的双环电流型PWM控制器原理图中可以明显看出,这一电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A,用于与基准电压比较后产生误差电压。
另一个是变压器初级(电感)中电流在Rs 上产生的电压与误差电压进行比较,产生调制脉冲的脉宽,使得误差信号对峰值电感电流起着实际控制作用。
结合图1所给出的双环电流型控制器的原理图,我们可以将这一PWM控制器的工作过程总结为:假设输入电压下降,整流后的直流电压下降,经电感延迟使输出电压下降,经误差放大器延迟,Vea上升,占空比变化,从而。
基于LC滤波器的单相SPWM逆变器双环控制设计
2电工电气 (20 7 No.4)作者简介:王博超(1992- ),女,硕士研究生,研究方向为电力电子控制技术与仿真。
基于LC滤波器的单相SPWM逆变器双环控制设计王博超(东南大学 电气工程学院,江苏 南京 210096)摘 要:对基于LC 滤波器的单相SPWM 逆变器的双环控制进行了分析,得到了LC 滤波器在逆变器使用单极性倍频的调制方式下的参数设定,以此为基础对单相逆变器的双环控制方式进行了建模及电压环、电流环的参数确定。
利用MATLAB/Simulink 软件对该逆变器模型进行了线性负载的突加突减仿真与带非线性负载时开、闭环的谐波畸变率的对比仿真。
仿真结果表明,该种控制策略下逆变器具有较好的动态响应性能及较低的谐波畸变率。
关键词:SPWM 逆变器;LC 滤波器;双环控制中图分类号:TM464 文献标识码:A 文章编号:1007-3175(2017)04-0021-05Abstract: This paper analyzed the double loop control of sigle-phase sinusoidal pulse width modulation (SPWM) inverter based on the LC filter and obtained the parameters setting of the LC filter under the conditions that the inverter used the unipolarity frequency-doubled modula -tion mode. On the basis of this, this paper established the sigle-phase inverter model with double loop control mode and determined the pa -rameters of voltage loop and current loop. The Simulink in MA TLAB was used to carry out simulation of sharp increase and reduction for the linear load of the inverter model, comparing with the loop-opened or loop-locked harmonic distortion rate for the nonlinear load. The simulation results show that this kind of control strategy can obtain favorable dynamic response and low total harmonic distortion (THD). Key words: sinusoidal pulse width modulation inverter; LC filter; double loop controlWANG Bo-chao(School of Electrical Engineering, Southeast University, Nanjing 2 00 , China )Design of Double Loop Control in Single-Phase Sinusoidal Pulse WidthModulation Inverter Based on LC Filter0 引言近些年来,为了获得具有更高的供电质量以及供电稳定性的供电系统,高性能的SPWM 逆变电源的研究、开发及其应用受到了各方面的关注,而其中的瞬时控制方案则是最重要的部分之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 3(a) 表明电流调节器使得电流内环的 相角裕度接近 800,稳定性较高;图 3(b)表明 电流内环带宽较宽,响应速度非常快;图 4(a) 显示电压外环相角裕度超过 600,幅值裕度非 常大; 图 4(b)表明双环控制系统基波闭环增益 接近 1,系统稳态性能非常好;图 5 表明负载 扰动在各个频段都有较大衰减, 系统具有很强 的负载扰动抑制能力。
2
(11)
(a) 额定功率阻性负载 (b) 额定功率阻感性负载 图 6 逆变器双环 PI-PI 控制系统负载突变响应 (100V/div, 100A/div, 0.01s/div)
电压外环的闭环传函和系统的输出阻抗 即式(5)中的 Gur ( s) 和 Gio ( s) 。可得如图 3~ 图 5 所示的双环控制系统的频率响应特性:
2
逆变器及控制系统模型
本文采用单相全桥逆变器为控制对象, 其
主电路原理图如图 1 所示:
图中 E 为直流母线电压, u1 为逆变桥输出 电压,u0 为逆变器输出电压,il 为滤波电感电 流,ic 为滤波电容电流,i0 为负载电流,r 为 考虑滤波电感 L 的等效串联电阻、死区效应、 开关管导通压降、 线路电阻等逆变器中各种阻 尼因素的综合等效电阻。
Abstract:The voltage and current dual loop control system is divided into inductor current feedback and capacitor current feedback. Both of them are analysed and compared in the paper. Depending on the difference of controller for the current loop, the dual loop control is classified into two methods: current loop using P controller with voltage loop using PI controller and both current loop and voltage loop using PI controller. Controller parameters are designed based on pole assignment technique. Simulink and experiment results demonstrated that both of two schemes could achieve good dynamic and static performance.
D (s) = s4 + rC + Ck 2 p LC s3 + 1 + k1 p k 2 p + Ck 2 i LC s2 +
k 1 p k 2 i + k 2 p k1 i LC
图2 控制系统方框图
s+
k1 i k 2 i LC
(6)
对上述系统按极点配置方法设计控制器 参数。 双环控制系统的控制器参数按常规方法
[4-5]
b
ul
u0
图 1 单相全桥逆变电路
对于单相逆变器这样一个双输入、 单输出 的二阶系统,选择电容电压 u0 和电感电流 i1 作为状态变量,可得状态空间表达式如下:
&0 0 u i = 1 & 1 − L 1 1 0 − C u0 + 1 u1 + C i0 i r − 1 L 0 L
摘要:分析比较了单相 PWM 逆变器电感电流内环电压外环和电容电流内环电压外环两种双环 控制方式,重点研究了电容电流内环电压外环双环控制。依据电流内环所采用调节器的不同,分别 讨论了电流内环采用 P 调节器、电压外环为 PI 调节器和电流内环、电压外环均为 PI 调节器两种双 环控制方式。采用极点配置的方法设计控制器参数,仿真和实验结果表明以上两种双环控制方式均 能达到较好的动、静态特性。
瞬时控制方案可以在运行过程中实时地 调控输出电压波形,使得供电质量大大提高。 文献研究表明电压外环电流内环的双环控制 方案是高性能逆变电源波形控制的发展方向 之一
[1-3]
,双环控制方案的电流内环扩大逆变
器控制系统的带宽,使得逆变器动态响应加 快,输出电压的谐波含量减小,非线性负载适 应能力加强。目前,这种基于电流内环的电压 源逆变器波形控制技术越来越得到广泛的应 用。 PWM 逆变器双环控制方案分为电感电流内 环电压外环和电容电流内环电压外环两种,由
电压给定信号 ur 与输出电压反馈信号 u0
设计, 需考虑两个调节器之间的响应速度、 频 带宽度的相互影响与协调, 控制器设计步骤复 杂, 还需要反复试凑验证; 采用极点配置方法 大大简化了设计过程, 同时能满足高性能指标 要求,这种设计方法具有明显的优越性。 针对一台单相 PWM 逆变器进行双环控制 器设计,逆变器的主要参数如下:额定输出电 压 Uor=220V(rms) ,额定频率 f=50Hz,额定 输出功率 Po=11kW, 额定功率因数 cosφ=0.8, 输 出 滤 波 电 感 L=0.43mH , 输 出 滤 波 电 容 C=140μF,等效阻尼电阻 r=0.1Ω,PWM 开 关频率 fsw=10kHz。取期望阻尼比ζr=0.8,期 望自然频率ωr=2500,可得:
s 2 ( sL + r ) I0 (s) LCD ( S )
= Gur ( s )U r ( s ) − Gio ( s) I o ( s )
(5)
系统输出传函中的前一部分 Gur ( s ) 体现了控 制系统输出对正弦电压给定 ur 的跟踪性能, 而后一部分 Gio (s) 体现了负载电流对控制系统 输出的扰动特性,即系统等效输出阻抗。 其中控制系统特征方程为:
(3) (4)
PWM 逆变器的电压电流双环控制分为两 类: 电感电流内环电压外环控制和电容电流内 环电压外环控制。对于电感电流内环控制,由 于负载电流 i0 作为逆变器的外部扰动信号处 在电感电流环之外, 控制系统不能很好的抑制 负载扰动,动态性能不理想。电容电流内环电 压外环控制系统动态性能好, 抗负载扰动性能 强。PWM 逆变器电容电流内环电压外环双环 控制系统框图如图 2 所示:
关键词:PWM 逆变器 双环控制 极点配置
Key words: PWM inverter, dual-loop control, pole assignment
1
பைடு நூலகம்
引
言
于电感电流内环对负载扰动的抑制作用较差, 尤其是在非线性负载时输出波形很不理想, 所 以本文采用电容电流内环电压外环控制方案。 本文中的逆变器双闭环控制结构由外环电压 调节器和内环电流调节器组成。 外环电压调节 器一般采用 PI 调节器,内环电流调节器可以 采用 PI 调节器或 P 调节器。采用极点配置方 法设计系统控制器参数, 通过仿真和实验对以 上两种双环控制方案进行了分析和比较。
T1 T3
比较得到电压误差, 经过电压调节器 Gv 产生电 流给定信号 uir,uir 与电容电流反馈信号 ic 比 较而得的电流误差信号经过电流调节器 Gi 形 成控制量 u1,对逆变器实施控制。
3 控制器设计、仿真和实验
3.1 电流内环采用 PI 调节器
r
il
L
E
T2
a
T4
io ic
C R
在该双环控制方案中,电流内环采用 PI 调节器,简称双环 PI-PI 控制系统。其中电流 调节器 Gi 的比例环节用来增加逆变器的阻尼 系数,使整个系统工作稳定,并保证有很强的 鲁棒性; 电流调节器的积分环节用来减少电流 环稳态误差;电压外环也采用 PI 调节器,电 压调节器 GV 的作用是使得输出电压波形瞬时 跟踪给定值。 这种电流内环电压外环双环控制 的动态响应速度十分快,且静态误差很小
(7) (8)
(a)开环频率特性
(b)闭环频率特性
图 4 电压外环频率特性
k 156040 + 2 i = 18.82 + s s
由图 2 可得电流内环的开环和闭环传函:
Giop ( s ) = C ( k 2 p s + k 2i ) LCs 2 + rCs + 1
(9)
图 5 输出阻抗频率特性
Gicl ( s ) =
C ( k2 p s + k2i ) LCs 2 + ( rC + Ck 2 p ) s + 1 + Ck 2i
(10)
利用电流内环闭环传函推导出电压外环 的开环传函:
Guop (s) =
(k1 p s + k1i ) (k2 p s+k2i ) s [LC s 2 + (r + k2 p )Cs + Ck2i + 1]
图 10 突加 68%额定负载时响应波形及局部放大图 (90V/div 20A/div 10ms/div) (b) WCF=4.9 图 9 非线性负载时电压电流波形及 THD (90V/div 50A/div 10ms/div) (a) WCF=3.2
。
(1)
u y = [1 0] 0 i1
(2)
电压和电流调节器分别为: k Gv ( s ) = k 1 p + 1i s k Gi ( s ) = k 2 p + 2 i s 可得到该控制系统的传递函数:
U 0 (s) = ( k1 p s + k1i )( k 2 p s + k 2 i ) LCD ( S ) U r (s) −