三种矢量控制的比较
无刷直流电机控制策略
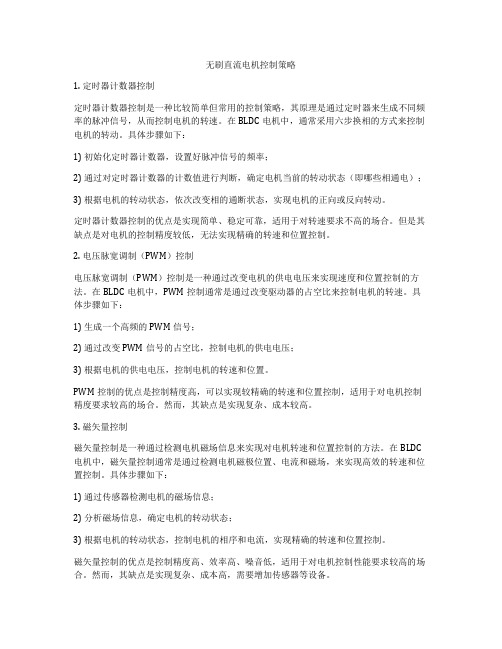
无刷直流电机控制策略1. 定时器计数器控制定时器计数器控制是一种比较简单但常用的控制策略,其原理是通过定时器来生成不同频率的脉冲信号,从而控制电机的转速。
在BLDC电机中,通常采用六步换相的方式来控制电机的转动。
具体步骤如下:1) 初始化定时器计数器,设置好脉冲信号的频率;2) 通过对定时器计数器的计数值进行判断,确定电机当前的转动状态(即哪些相通电);3) 根据电机的转动状态,依次改变相的通断状态,实现电机的正向或反向转动。
定时器计数器控制的优点是实现简单、稳定可靠,适用于对转速要求不高的场合。
但是其缺点是对电机的控制精度较低,无法实现精确的转速和位置控制。
2. 电压脉宽调制(PWM)控制电压脉宽调制(PWM)控制是一种通过改变电机的供电电压来实现速度和位置控制的方法。
在BLDC电机中,PWM控制通常是通过改变驱动器的占空比来控制电机的转速。
具体步骤如下:1) 生成一个高频的PWM信号;2) 通过改变PWM信号的占空比,控制电机的供电电压;3) 根据电机的供电电压,控制电机的转速和位置。
PWM控制的优点是控制精度高,可以实现较精确的转速和位置控制,适用于对电机控制精度要求较高的场合。
然而,其缺点是实现复杂、成本较高。
3. 磁矢量控制磁矢量控制是一种通过检测电机磁场信息来实现对电机转速和位置控制的方法。
在BLDC 电机中,磁矢量控制通常是通过检测电机磁极位置、电流和磁场,来实现高效的转速和位置控制。
具体步骤如下:1) 通过传感器检测电机的磁场信息;2) 分析磁场信息,确定电机的转动状态;3) 根据电机的转动状态,控制电机的相序和电流,实现精确的转速和位置控制。
磁矢量控制的优点是控制精度高、效率高、噪音低,适用于对电机控制性能要求较高的场合。
然而,其缺点是实现复杂、成本高,需要增加传感器等设备。
总结以上介绍了三种常用的无刷直流电机控制策略,每种策略都有其特点和适用范围。
在实际应用中,根据具体的需求和条件选择合适的控制策略是非常重要的。
矢量控制
异步电动机的工作原理中,最重要的是旋转磁场的产生。因此, 要实现变换必须确保空间产生同样大小、同样转速和同样转向的旋 转磁场条件下,通过绕组等效变换来实现。
从异步电动机的工作原理可知,对于空间上对称的三相定子绕
组U、V、W,可以抽象为静止的a-b-c坐标系,通过时间上对称 变化的三相正弦交流电流ia1、ib1、ic1后,产生一个以电源频率速度 在空间旋转的磁场,如图8-2中(a)、(d)所示。
空间上互差90°的两相定子绕组α、β,可以把它抽象为静止 的α—β坐标系,通以时间上互差90° 的两相正弦交流电电流iα和iβ, 也可以在空间产生一个旋转磁场,如上图中(b)、(e)所示。当该两 套绕组所产生的旋转磁场 大小相等,转速、转向相同时,这两套
绕组是相互等效的。
图8-2中(c)、(f)表示了两个相互垂直的绕组M和T分别通以
3 1 6Fra bibliotek0 1
i i
2
β
T i
F1(I1)
ω1
iT
iT cos
Φ
iM
M
1
iT sin
iM sin
α
i M cos
图8-6 旋转变换矢量图
矢量的旋转控制,即二相—二相的旋转变换(2s/2r
从二相静止坐标系到二相旋转坐标系的变换,简称 2s/2r,其中s表示静止,r表示旋转。把两个坐标系画在一 起,即得图8—6。图8—6中F1是由对称的三相定子电流ia、 ib、ic所建立的异步电动机旋转磁动势的空间矢量。由于磁动 势F1在数值上与定子电流有效值成正比,因此常用定子电流 综合矢量I1来代替F1,此时I1是与F1等效的空间矢量,而不 再是时间矢量。磁通Φ是作为旋转坐标系M轴轴线的旋转磁 通矢量,常取转子全磁通作为这一基准磁通。为了使交流的 旋转矢量变换成直流标量,M—T坐标系与I1以同样的转速 ω1在空间旋转。将定子电流综合矢量I1分解成与M轴即磁通 矢和量转方矩向电相流重分合量和,正在交同的步两旋个转分的量M—iM和T坐iT标,系即中励,磁它电们流显分然量 具有直流的特性,这样就可以如直流电动机一样,分别控制 iM和iT,实现了瞬时控制异步时机电磁转矩的性能。
变频器频率调节方法

变频器频率调节方法变频器是一种用于调节电机运行速度和输出功率的装置,广泛应用于工业领域。
在实际应用中,频率调节是变频器的核心功能之一。
本文将介绍几种常见的变频器频率调节方法。
一、电压/频率(V/F)调节法电压/频率(V/F)调节法是最简单和常见的一种方法。
它通过控制变频器输出电压和频率的比值来实现电机的调速。
在这种调节方法下,当频率增加时,输出电压也相应增加,以保持电机的电磁转矩基本不变。
这种方法适用于大多数恒转矩负载的情况下,例如风机、水泵等。
在运行过程中,需要根据负载的变化不断调整电压和频率的比值,以保持电机的稳定运行。
二、矢量控制调节法矢量控制调节法是一种相对复杂的调节方法,它可以实现更高的速度响应和控制精度。
在矢量控制中,通过对电机的电流进行控制,实现对电机的转矩、转速和位置的精确控制。
与V/F调节法相比,矢量控制可以更好地适应负载的变化,并且可以实现起动转矩和低速运行时的高转矩输出。
这种调节方法适用于对控制精度和动态性能要求较高的负载,如机床、卷烟机等。
三、磁场定向调节法磁场定向调节法是在矢量控制的基础上发展起来的一种高级调节方法。
它通过对电机的转子磁化电流和轴向磁化电流进行控制,实现对电机磁场的定向,从而实现对电机的转矩和转速的精确控制。
磁场定向调节法具有更高的动态性能和控制精度,能够在较宽的速度范围内提供稳定的输出转矩。
这种调节方法适用于对控制精度要求极高的负载,如电梯、印刷机等。
四、PID闭环控制调节法PID闭环控制调节法是一种通过测量电机速度和设定速度之间的差异,并根据差异大小自动调整输出频率的方法。
PID控制器根据系统反馈信号和设定值之间的偏差,即误差进行计算,通过比例、积分和微分三种方式进行控制,从而实现对电机转速的精确控制。
这种调节方法适用于对转速控制要求较高的负载,如精密机械加工设备等。
综上所述,变频器频率调节方法有电压/频率调节法、矢量控制调节法、磁场定向调节法和PID闭环控制调节法等。
基于matlab的永磁同步电机调速系统的仿真
摘要本文首先介绍了永磁同步电机的国内外发展状况,然后介绍了永磁同步电机的结构及原理,接着建立了永磁同步电机的数学模型,并在此基础上用MATLAB 进行了仿真,最后进行了仿真及仿真结果的分析。
永磁同步电机是具有非线性、强耦合性、时变性的系统,在运行过程中会受到负载扰动等多因素影响。
以往研究永磁同步电机的做法是在硬件上搭建一个平台进行模拟,但是这样在做实验中难免会造成一些损失,而且硬件上的反馈会比较长研究周期长。
目前在国内外关于永磁同步电机调速系统的研究现状上来讲,基于MATLAB环境下仿真模型的构建下进行研究,这可极大的缩短研究周期和研究成本。
在利用MATLAB仿真模型研究永磁同步电机时,我们可以把那些扰动因数做成模拟信号给予模型,这样可以准确的定性分析实验得出结论。
关键字:永磁同步电机,空间矢量调制,MATLAB仿真,数学模型。
ABSTRACTIn the first, this paper introduces the domestic and international development status of Permanent Magnet Synchronous Motor(PMSM), gives a explanation about its basictheory, structure. Then it builds a mathematical model, and uses MATLAB to simulate that model.The PMSM is a nonlinear, strong-coupling and time-varying system, so in the operation process, it will be influenced by many factors such asload disturbance. Therere, it is necessary to take action when researching the control method of PMSM. The former research method is setting up a platform on hardware to perform experimensbut it is undesirable, because it often cause some loss, and the feedback cycle is longer than research cycle. As fordomestic and international current situation on the research of PMSM, it is obvious that researching under the simulation model created by MATLAB could greatly reduce the cost and cycle of researchment. When using MATLAB to build simulation model on the research of PMSM, we can transform these disturbance factors into analog signal, making a qualitative analysis to draw conclusions from them.Keywords:PMSM, SVPWM, MATLAB simulation, mathmatical model目录摘要 (I)ABSTRACT .............................................. I I 目录............................................... I II 第一章绪论 (1)1.1 研究背景及意义 (1)1.1.1 研究背景 (1)1.1.2 研究的目的及意义 (1)1.2 国内外研究现状 (2)1.2.1 国内研究历史及现状 (2)1.2.2 国外研究现状及趋势 (2)1.3 本文的主要内容 (3)第二章永磁同步电机调速系统的结构和数学模型 (5)2.1 引言 (5)2.2 永磁同步电机调速系统的结构 (5)2.3 永磁同步电机调速系统的数学模型 (6)2.3.1 PMSM在ABC坐标系下的磁链和电压方程 (6)坐标系下的磁链和电压方程 (8)2.3.2 PMSM在02.3.3 PMSM在dq0坐标系下的磁链和电压方程 (9)2.4 永磁同步电机的控制策略 (11)2.5 本章小节 (12)第三章永磁同步电机矢量控制及空间矢量脉宽调制 (14)3.1 引言 (14)3.2 永磁同步电动机的矢量控制 (14)3.3 空间矢量脉宽调制概念 (15)3.4 SVPWM模块的建立 (17)3.5 本章小结 (23)第四章基于Matlab的永磁同步调速系统仿真模型的建立 (24)4.1 引言 (24)4.2 MATLAB软件的介绍 (24)4.3永磁同步电机调速系统整体模型的建立 (25)4.4仿真参数调试及结果分析 (28)4.5本章小结 (29)第五章总结与展望 (30)5.1全文总结 (30)参考文献 (31)致谢 (33)第一章绪论1.1 研究背景及意义1.1.1 研究背景随着电力电子技术、微电子技术和现代电机控制理论的发展,交流调速系统逐步具备了宽调速范围、高稳速精度、快速动态响应及四象限运行等良好的技术性能,交流调速系统应用越来越广泛。
S120单传培训 第1章 电气传动系统的组成
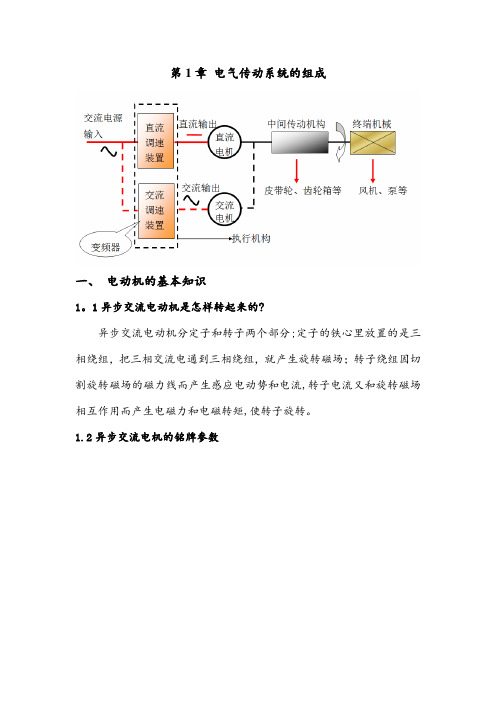
第1章电气传动系统的组成一、电动机的基本知识1。
1异步交流电动机是怎样转起来的?异步交流电动机分定子和转子两个部分;定子的铁心里放置的是三相绕组,把三相交流电通到三相绕组,就产生旋转磁场;转子绕组因切割旋转磁场的磁力线而产生感应电动势和电流,转子电流又和旋转磁场相互作用而产生电磁力和电磁转矩,使转子旋转。
1.2异步交流电机的铭牌参数1 电机型号YTSP112M—4 YTSP:电机型号;112M:机座号;4:4极电机2 电机额定功率 4kW3 电机额定电压 380V4 电机额定电流 9A5 电机额定频率 50Hz6 电机接线方法 Y形7 定额 S1 电机工作制:S1连续工作制8 电机额定转矩电机额定转速25。
4 N.m 1437r/min9 恒转矩范围3—50Hz 电机的运行方式型号:表示电动机的系列品种、性能、防护结构形式、转子类型等产品代号;电机额定功率:表示额定运行时电动机轴上输出的额定机械功率,单位KW或HP,1HP=0。
736KW;电机额定电压:直接到定子绕组上的线电压(V),电机有Y形和△形两种接法,其接法应与电机铭牌规定的接法相符,以保证与额定电压相适应;电机额定电流:电动机在额定电压和额定频率下,并输出额定功率时定子绕组的三相线电流;电机额定频率:指电动机所接交流电源的频率,我国规定为50HZ±1 电机额定转速:电动机在额定电压、额定频率、额定负载下,电动机每分钟的转速(r/min);电机额定转矩:在额定电压下、额定负载下,电动机转轴上产生的电磁转矩T(N。
m).工作定额:指电动机运行的持续时间;绝缘等级:电动机绝缘材料的等级,决定电机的允许温升。
额定负载(额定状态):可以这样理解,就是电机输出轴所连接的机械负载和电机标牌标定的输出功率相同(负载功率=电机额定功率),这样的负载,称为额定负载.或也可以这样理解:给电机加上额定电压,能够使电机的电流为额定电流的负载就是额定负载. 1.3电机学里面的几个重要公式:定子旋转磁场的转速,常称为同步转速;转子转速与同步转速之差成为转差(转子转速始终低于同步转速);转差与同步转速之比,称为转差率。
交流电机中扭矩控制方法
交流电机中扭矩控制方法
交流电机是现代工业中最常见的电机类型之一,其特点是转速和旋转方向容易控制,并具有良好的稳定性和效率。
在工业生产中,控制电机的扭矩是必不可少的,可以实现各种复杂的运动控制。
本文将介绍交流电机中的扭矩控制方法。
1. 扭矩控制的概念
扭矩控制是通过改变电机的电势或电流来控制输出扭矩的大小。
通过有效的扭矩控制方法,可以在工业机械、车辆、电梯和风力发电等领域中实现高效、精确和安全的运动控制。
在交流电机中,有三种常用的控制方法:电压控制、电流控制和矢量控制。
以下是这三种方法的详细介绍。
2.1 电压控制
电压控制是指通过改变电机输入电压,来控制电机的输出扭矩。
当电压增加时,电机的输出扭矩也会增加。
这种方法受到负载变化的影响较大,因为负载变化会影响电机的输出速度,从而影响电机的输出扭矩。
矢量控制是指通过控制电机的转子磁场来实现精确的扭矩控制。
矢量控制需要测量电机输出的电流和电压,然后对电机进行电流控制和电压控制。
在这种控制方法中,电机的转子磁场可以按照设定的路径旋转,从而实现高效的扭矩控制。
由于需要更为复杂的算法和计算,矢量控制通常被用于高级工业应用,如石油开采、轨道交通和高速电机。
3. 总结
扭矩控制是交流电机中的重要控制方法之一,可以实现精确的运动控制。
不同的扭矩控制方法有其优点和缺点,选择合适的方法需要考虑实际应用情况。
在实际应用中,可以根据负载情况、控制精度和成本等因素进行选择。
随着计算机控制技术的不断进步,未来扭矩控制方法将会更为精确和智能。
电机与电力电子掌握电动机的控制与驱动技术

电机与电力电子掌握电动机的控制与驱动技术电机是现代工业与生活中不可或缺的重要设备,而电力电子作为电机的控制与驱动核心技术,对电机的性能表现和应用提出了更高的要求。
本文将介绍电机的控制与驱动技术,并探讨它们在各个领域的应用。
1. 电机的基本原理电机是将电能转化为机械能的设备。
电机的基本原理是利用电流通过导线产生的磁场与永磁体或电磁体之间相互作用来产生力矩。
根据电机的不同工作原理,可以将其分为直流电机和交流电机。
2. 电机控制技术电机的控制技术是指通过改变电流或电压来控制电机的运行状态。
常见的电机控制技术包括调速、转向、定位等。
其中,电机的调速控制技术是电机控制中最常用的技术之一。
2.1 直流电机控制技术直流电机采用的控制技术主要包括电阻切换控制、PWM控制和矢量控制三种。
2.1.1 电阻切换控制电阻切换控制是通过改变电阻来改变电机的转速。
这种控制技术简单、成本低,但效果较差,不适用于对电机性能要求较高的应用场合。
2.1.2 PWM控制PWM控制是通过改变脉宽来改变电机的转速。
脉宽越大,电机的转速越快。
这种控制技术简单、效果较好,被广泛应用于各种直流电机控制系统中。
2.1.3 矢量控制矢量控制是将直流电机模型转换为交流电机模型进行控制,通过控制电流和电压的相位和幅值来实现电机的精确控制。
矢量控制技术具有高效性能和较高的响应速度,适用于对电机精确度要求较高的应用场合。
2.2 交流电机控制技术交流电机的控制技术主要包括感应电机矢量控制、同步电机矢量控制和直接转矩控制三种。
2.2.1 感应电机矢量控制感应电机矢量控制是通过控制电流和电压的相位和幅值来实现对感应电机的精确控制。
这种控制技术具有较高的效率和较好的响应性能,被广泛应用于传动系统、工业控制等领域。
2.2.2 同步电机矢量控制同步电机矢量控制是通过控制电流和电压的相位和幅值来实现对同步电机的精确控制。
同步电机矢量控制技术具有较高的效率和较好的动态性能,适用于对电机稳定性要求较高的应用场合。
线性系统理论论文 ——永磁同步电机的全维状态观测器设计

永磁同步电机的全维状态观测器设计在环境污染和能源危机日益严重的今天,节能减排是大势所趋,而永磁同步电机高启动转矩、高效率、高功率因数和低惯性的优点正好可以满足节能减排的需求,因而有关永磁同步电机的研究越来越多,同时稀土永磁材料和微电子技术的快速发展,也使得永磁同步电机的飞速发展成为现实,它的使用范围也逐渐扩展至交通运输,航空,军事和民用等重要领域。
不同的电机控制策略对应着不同的控制效果,所以采用何种控制策略来使永磁同步电机具有高效、高节能、高稳定性的性能就成为了学者们的研究热点。
目前常见的电机控制方式为矢量控制(FOC)和直接转矩控制(DTC)。
对于永磁同步电机 DTC 来说,理想状况下转矩在全速范围内应该是稳定不变的。
然而受时滞现象和不同速度区域内工作状态的影响,实际中电机转矩并不是稳定的。
因此如何减小转矩脉动、提高全速范围内转矩的稳定性能是永磁电机DTC 研究的重点。
本文拟用降维状态观测器构建基于状态观测器的永磁同步电机直接转矩控制系统,并验证其准确性。
1. 永磁同步电机的分类和结构特点永磁同步电机与其他电机一样都是由定子和转子组成,其中定子是三相对称的绕组并且通常接成 Y 型,转子为永磁体结构。
当定子绕组中通以三相正弦交流电时会产生均匀旋转的磁场,这个磁场和转子永磁体磁场相互作用就会产生一个转矩来推动转子不断地旋转。
目前转子上的永磁体有三种安放方式,每一种安放方式都对应各自的电机制造工艺、适用场所、运行性能、控制方法,因此根据永磁体的安放方式可将电机分为以下三类:图 1 三种电机的内部结构其中a为插入式,b为表面式,c为内置式图1(a)描述的是插入式永磁同步电机。
插入式永磁同步电机,即永磁体插入或部分插入转子中,故而它的结构要比表面式永磁电机稳定。
从电磁性能上来说,其属于凸极式永磁电机,转子磁路不对称,有磁阻转矩且其交、直轴电感不同。
由于其磁通密度大,所产生的转矩也较大,比较适合有高转速需求的场合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
磁场定向矢量控制技术按照获得磁链的不同方式大致可分为两种:直接和间接方式。
直接方式的实现依赖于直接测量或对转子,定子,气隙磁链矢量的幅值和位置的估算。
传统的直接矢量控制策略使用检测线圈,具有抽头的定子绕组或霍尔效应传感器对磁通进行检测,但由于电机结构或散热的需要就会产生一定的限制,但随着目前高速DSP的不断面世,在一个PWM周期内,实现负载的控制及磁链估算应成为可能,所以近年来基于磁链观测器的直接方式由重新得到了人们的重视。
而间接方式则使用电动机模型,例如对于转子磁通定向控制,它利用了固有的转差关系。
与直接的方法相比,间接方式对电机参数有较高的依赖性。
多数场合使用间接策略,因为这会使硬件电路相对简单并且在低频下也具有较好的总体性能,但是由于包含了会随着温度,饱和度和频率变化而变化的电机参数,所以需要研究不同的参数自适应策略。
如果从选择的磁链矢量分类的话,磁场定向矢量控制技术一般可分为三种,即气隙磁场定向控制,定子磁场定向控制,转子磁场定向控制。
1. 气隙磁场定向控制方案。
气隙磁场的定向控制是将旋转坐标系的M轴定向于气隙磁场的方向,此时气隙磁场的T轴分量为零。
如果保持气隙磁通M轴分量恒定,转矩直接和T轴电流成正比。
因此,通过控制T轴电流,可以实现转矩的瞬时控制,从而达到控制电机的目的。
2.定子磁场定向控制方案。
定子磁场定向的控制方法,是将旋转坐标的M轴放在定子磁场方向上,此时,定子磁通的T轴分量为零。
如果保持定子磁通恒定,转矩直接和T轴电流成正比,从而控制电机。
定子磁场定向控制使定子方程大大简化,从而有利于定子磁通观测器的实现。
然而此方案在进行磁通控制时,不论采用直接磁通闭环控制,还是采用间接磁通闭环控制,均须消除耦合项的影响。
因此,需要设计一个解耦器,对电流进行解耦。
3. 转子磁场定向控制方案。
转子磁场定向的控制方法是在磁场定向矢量控制方法中,将M,T 坐标系放在同步旋转磁场上,将电机转子磁通作为旋转坐标系的M坐标轴。
若忽略由反电动势引起的交叉祸合,只需检测出定子电流的M轴分量,就可以观测转子磁通幅值。
当转子磁通恒定时,电磁转矩与定子电流的T轴分量成正比,通过控制定子电流的T轴分量就可以控制电磁转矩。
因此称定子电流的M轴分量为励磁分量,定子电流的T轴分量为转矩分量。
可由电压方程M轴分量控制转子磁通,T轴分量控制转矩,从而实现磁通和转矩的解耦控制。
下面对它们进行简要的总结和比较:
气隙磁场定向系统中磁通关系和转差关系中存在耦合,需要增加解耦器这使得它比转子磁通的控制方式要复杂,但具有一些状态能直接测量的优点,比如气隙磁通。
同时电机磁通的饱和程度与气隙磁通一致,故基于气隙磁通的控制方式更适合于处理饱和效应。
定子磁场定向的矢量控制方案,在一般的调速范围内可利用定子方程作磁通观测器,非常易于实现,且不包括对温度变化敏感的转子参数,可达到相当好的动静态性能,同时控制系统结构也相对简单,然而在低速时,由定子电阻压降占端电压的大部分,致使反电动势测量误差较大,导致定子磁通观测不准,影响系统性能。
定子磁场定向的矢量控制系统适用于大范围弱磁运行的情况。
转子磁场定向的控制方案,缺点是磁链闭环控制系统中转子磁通的检测精度受转子时问常数的影响较大,降低了系统性能。
但它达到了完全的解耦控制,无需增加解耦器,并且不存在静态稳定性限制的条件,控制方式简单,具有较好动态性能和控制精度,故应用最为广泛。