《汽车理论》第五章 汽车的操纵稳定性
汽车理论课件第五章

X轴和Y轴的交点就是坐标系原点O。 ➢ Z轴过原点O,垂直于地平面,以
向上为正方向。
正方向标示、而非
注意:
“受力实况”P164
• 由于车轮有外倾角γ(或上下跳动),车轮平面不一定垂直于地面;
• 由于轮胎有侧偏角α,X轴未必指向车轮速度方向。
• 钢丝子午线轮胎比尼龙子午线轮胎的侧偏刚度还要大些。
➢ 相同种类的轮胎,尺寸较大的轮胎具有较高的侧偏刚度。 ➢ 降低高宽比(扁平率),轮胎的侧偏刚度会显著提高。如图5-12
高宽比—轮胎断面高与轮胎断面宽之比,即H/B 。
解读轮胎规格:
• 降低高宽比还可以提高轮胎与地面的附着能力, 车辆的驱动、制动和极限转向能力会得到提高。 “追求高性能的运动型轿车”P174
➢ 在同一FZ作用下, FX和FY之间服从附 着椭圆关系。
➢ 由A到B,对应滑动率s的增大, FX和 FY的变动规律符合第四章的结论。
汽车理论 吉林大学汽车工程学院
17
§5-2 轮胎的侧偏现象与侧偏特性
6.行驶速度
➢ 在正常车速范围内时,速度的变 化对轮胎侧偏特性的影响很小。
➢ 车速很高时,侧偏刚度随着车速 的升高而下降,尤其是侧偏角较 大时。 这并不是行驶速度本身造成的,
L
P165
汽车理论 吉林大学汽车工程学院
6
§5-1 概述
上述 “理想刚性”条件,有些是不符合实际的。汽车系统存在
一些实际特性,使得:
②
① 各车轮的实际指向(即轮胎坐标 系的X轴)并不总是与各自的 “名义指向”完全重合;
② 各车轮的实际行驶方向也并不一 定沿着其轮胎坐标系的X轴方向。
汽车理论5汽车的操纵稳定性
第5章汽车的操纵稳定性学习目标通过本章的学习,应掌握汽车行驶的纵向和横向稳定性条件;掌握车辆坐标系的有关术语,了解影响侧偏特性的因素,掌握轮胎回正力矩与侧偏特性的关系;熟练掌握汽车的稳态转向特性及其影响因素;了解汽车转向轮的振动和操纵稳定性的道路试验内容。
汽车在其行驶过程中,会碰到各种复杂的情况,有时沿直线行驶,有时沿曲线行驶。
在出现意外情况时,驾驶员还要作出紧急的转向操作,以求避免事故。
此外,汽车还要经受来自地面不平、坡道、大风等各种外部因素的干扰。
一辆操纵性能良好的汽车必须具备以下的能力:(1)根据道路、地形和交通情况的限制,汽车能够正确地遵循驾驶员通过操纵机构所给定的方向行驶的能力——汽车的操纵性。
(2)汽车在行驶过程中具有抵抗力图改变其行驶方向的各种干扰,并保持稳定行驶的能力——汽车的稳定性。
操纵性和稳定性有紧密的关系:操纵性差,导致汽车侧滑、倾覆,汽车的稳定性就破坏了。
如稳定性差,则会失去操纵性,因此,通常将两者统称为汽车的操纵稳定性。
汽车的操纵稳定性,是汽车的主要使用性能之一,随着汽车平均速度的提高,操纵稳定性显得越来越重要。
它不仅影响着汽车的行驶安全,而且与运输生产率与驾驶员的疲劳强度有关。
5.1节汽车行驶的纵向和横向稳定性5.1.1 汽车行驶的纵向稳定性汽车在纵向坡道上行驶,例如等速上坡,随着道路坡度增大,前轮的地面法向反作用力不断减小。
当道路坡度大到一定程度时,前轮的地面法向反作用力为零。
在这样的坡度下,汽车将失去操纵性,并可能产生纵向翻倒。
汽车上坡时,坡度阻力随坡度的增大而增加,在坡度大到一定程度时,为克服坡度阻力所需的驱动力超过附着力时,驱动轮将滑转。
这两种情况均使汽车的行驶稳定性遭到破坏。
图5.1 汽车上坡时的受力图图5.1为汽车上坡时的受力图,如汽车在硬路面上以较低的速度上坡,空气阻力可以忽略不计,由于剩余驱动力用于等速爬坡,即汽车的加速阻力,加速阻力矩,而车轮的滚动阻力矩的数值相对来说比较小,可不计入。
汽车理论第五章汽车的操纵稳定性
|k| 越大越好。
侧偏特性是轮胎极其 重要的特性,是研究 和分析汽车的操纵稳 定性的力学基础。
39
第二节 轮胎的侧偏特性
三、轮胎结构、工作条件对侧偏特性的影响
1) 轮胎的尺寸、型式和结构参数对侧偏刚度有显著影响。
大尺寸轮胎
大尺寸轮胎
子午线轮胎
侧偏刚度大
钢丝子午线轮胎
汽车理论
第二十四讲
主讲教师:杨志华
学时:48
第五章汽车的操纵稳定性
➢汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳 的情况下,汽车能遵循驾驶者通过转向系统及转向车轮给定 的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持 稳定行驶的能力。 (操纵+稳定)
➢汽车的操纵稳定性是汽车主动安全性的重要评价指标。
返回目录 2
第五章 汽车的操纵稳定性
第一节 概述
➢本节将介绍汽车操纵稳定性包含的内容、车辆坐 标系、转向盘角阶跃输入下的时域响应特性等。
➢本节还将介绍操纵稳定性的研究方法及试验评价 方法。
返回目录 3
第一节 操纵稳定性概述
一、操纵稳定性包含的内容
汽车的操纵稳定性研究内容较广泛,涉及较多的评价指标。 下面做简要介绍。
汽车轮胎
5)外倾时产生的回正力矩
摩托车轮胎
65
第二节 轮胎的侧偏特性
66
第二节 轮胎的侧偏特性
本节内容结束
下一节
67
汽车理论
第二十八讲
主讲教师:杨志华
学时:48
第五章 汽车的操纵稳定性
第三节 线性二自由度汽车模型对前轮角输
入的响应
➢本节将首先建立线性二自由度汽车模型;在此基础 上,分析汽车的稳态响应特性、瞬态响应特性和频率响
汽车理论
第五章汽车的操纵稳定性.概念:汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的条件下,汽车能遵循驾驶者通过转向系及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。
既影响汽车驾驶的操纵方便程度,而且也是决定高速汽车安全行驶的一个主要性能,称之为‘高速车辆的生命线’。
在汽车操纵稳定性的研究中,常把汽车作为一控制系统,求出汽车曲线行驶的时域响应与频域响应,并以他们来表征汽车的操纵稳定性。
汽车曲线行驶时的时域响应系是指汽车在转向盘输入或外界侧向干扰输入下的侧向运动响应。
转向盘输入有两种形式:角位移输入(角输入)和力矩输入(力输入)。
驾驶员实际驾驶车辆时,对转向盘的输入是同时加入的。
外界干扰输入主要是指侧向风与路面不平产生的侧向力。
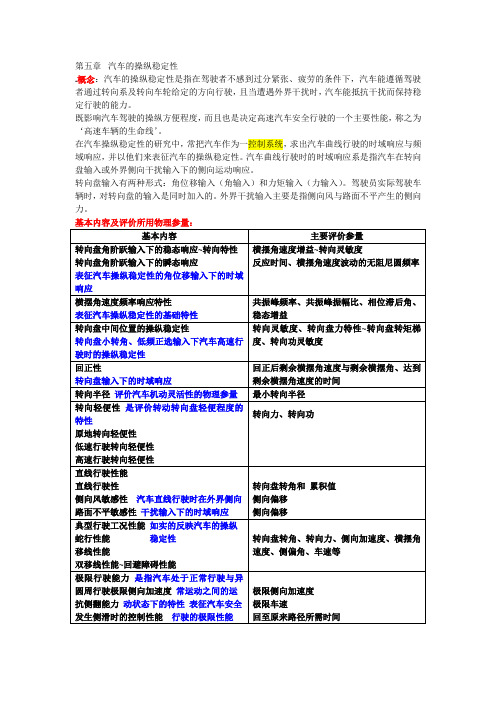
基本内容及评价所用物理参量:基本内容主要评价参量转向盘角阶跃输入下的稳态响应~转向特性转向盘角阶跃输入下的瞬态响应表征汽车操纵稳定性的角位移输入下的时域响应横摆角速度增益~转向灵敏度反应时间、横摆角速度波动的无阻尼圆频率横摆角速度频率响应特性表征汽车操纵稳定性的基础特性共振峰频率、共振峰振幅比、相位滞后角、稳态增益转向盘中间位置的操纵稳定性转向盘小转角、低频正选输入下汽车高速行驶时的操纵稳定性转向灵敏度、转向盘力特性~转向盘转矩梯度、转向功灵敏度回正性转向盘输入下的时域响应回正后剩余横摆角速度与剩余横摆角、达到剩余横摆角速度的时间转向半径评价汽车机动灵活性的物理参量最小转向半径转向轻便性是评价转动转向盘轻便程度的特性原地转向轻便性低速行驶转向轻便性高速行驶转向轻便性转向力、转向功直线行驶性能直线行驶性侧向风敏感性汽车直线行驶时在外界侧向路面不平敏感性干扰输入下的时域响应转向盘转角和累积值侧向偏移侧向偏移典型行驶工况性能如实的反映汽车的操纵蛇行性能稳定性移线性能双移线性能~回避障碍性能转向盘转角、转向力、侧向加速度、横摆角速度、侧偏角、车速等极限行驶能力是指汽车处于正常行驶与异圆周行驶极限侧向加速度常运动之间的运抗侧翻能力动状态下的特性表征汽车安全发生侧滑时的控制性能行驶的极限性能极限侧向加速度极限车速回至原来路径所需时间汽车是一个由若干部件组成的物理系统。
汽车理论课件-汽车的操纵稳定性
極限側向加速度 極限車速
發生側滑時的 控制能力
ቤተ መጻሕፍቲ ባይዱ
評價參量
回至原來路徑 所需時間
操縱穩定性包含的內容
*
汽車理論
第二十五講
主講教師:楊志華
學時:48
第一節 操縱穩定性概述
二、車輛坐標系與轉向盤角階躍 輸入下的時域回應
1.車輛坐標系
右手系
*
第一節 操縱穩定性概述
2.穩態回應特性
➢汽車直線行駛時,急速轉動轉向盤至某一轉角時,停止轉 動轉向盤並維持此轉角不變,即給汽車以轉向盤角階躍輸入。
*
第一節 操縱穩定性概述
2.橫擺角速度頻率回應特性
轉向盤轉角正弦輸 入下,頻率由0→∞變 化時,汽車橫擺角速 度與轉向盤轉角的振 幅比及相位差的變化 規律。
評價參量
➢共振峰頻率。 ➢共振時振幅比。 ➢相位滯後角。 ➢穩態增益。
操縱穩定性包含的內容
*
第一節 操縱穩定性概述
3.轉向盤中間位置操縱穩定性
*
第一節 操縱穩定性概述
瞬態回應的評價指標
1)時間上的滯後
2)執行上的誤差 (ωr1/ωr0)×100%
稱為超調量
3)橫擺角速度的波動 波動的ω =2π/T , 取
決於汽車的結構參數
4)進入穩態所經歷 的時間σ
*
第一節 操縱穩定性概述
三、操縱穩定性的研究方法
將汽車作為開路控制系統 人—汽車系統作為閉路系統
轉向盤小轉角、低頻 正弦輸入下,汽車高速 行駛時的操縱穩定性。
評價參量
4.回正性
➢轉向靈敏度。 ➢轉向盤力特性。 ➢轉向功靈敏度。
轉向盤力輸入 下的時域回應。
評價參量
➢回正後剩餘橫擺角 速度與剩餘橫擺角。
汽车理论第五_课后习题答案正确

第五章汽车的操纵稳定性5.1 一轿车(每个)前轮的侧偏刚度为-50176N/rad.外倾刚度为-7665N/rad«若轿车向左转弯,将使前轮均产生正的外倾角,其大小为4度。
设侧偏刚度与外倾刚度均不受左、右轮负载转移的影响,试求由外倾角引起的前轮侧偏角。
解:有外倾角时候的地而侧向反作用力为F Y=ka + k y y(其中k为侧偏刚度,k「为外倾刚度,丫为外倾角)于是,有外倾角引起的前轮侧偏角的大小为:代入数据,解得a, ==0.611 rad,期外由分析知正的外倾角应该产生负的侧偏角,所以由外倾角引起的前轮侧偏角为-0.611 rad o5.2 6450N轻型客车在试验中发现过多转向和中性转向现象,工程师们在悬架上加装横向稳左杆以提高前悬架的侧倾角刚度,结果汽车的转向特性变为不足转向。
试分析英理论依据(要求有必要的公式和曲线)。
答:由课本P138-140的分析知,汽车稳态行驶时,车厢侧倾角决左于侧倾力矩M枷和悬架总的角刚度工K軒, 即0广一。
前、后悬架作用于车厢的恢复力矩增加:% =00, T沁=匕』「其中K歸,K卯2分别为前、后悬架的侧倾角刚度,悬架总的角刚度工K”为前、后悬架及横向稳立杆的侧倾角刚度之和。
由以上的分析易知,当增加横向稳立杆后汽车前悬架的侧倾角刚度增大,后悬架侧倾角刚度不变,所以前悬架作用于车厢的恢复力矩增加(总侧倾力矩不变),由此汽车前轴左、右车轮载荷变化量就较大。
由课本图5-46知在这种情况下,如果左右车轮轮胎的侧偏刚度在非线性区,则汽车趋于增加不足转向量。
5.3汽车的稳态响应有哪几种类型?表征稳态响应的具体参数有哪些?它们彼此之间的关系如何?答:汽车的稳态响应有三种类型,即中性转向、不足转向和过多转向。
表征稳态响应的参数有稳定性因数,前、后轮的侧偏角角绝对值之差(<z,-a2),转向半径的比R/R<),静态储备系数SM等。
它们之间的彼此关系为:« =丄(⑦-%)(⑷为侧向加速度的绝对值);—=1 4- Kir :&S.M.二一--(k t,灼分别为汽车前、后轮的侧偏刚度,"为汽车质心到前轴的距禽,L为前、后轴之间的距k} +k2 L5.4举出三种表示汽车稳态转向特性的方法,并说明汽车重心前后位置和内、外轮负荷转移如何影响稳态转向特性?答:表示汽车稳态转向特性的参数有稳左性因数,前、后轮的侧偏角绝对值之差(冬-&2),转向半径的比R/R(“ 静态储备系数S.M.等。
汽车理论---第五章 汽车操纵稳定性(5.4-5.5)
第四节 汽车操纵稳定性与悬架的关系
车厢侧倾时不同形式悬架所引起的车轮外倾角的γ变化
单纵臂悬架前轮外倾角与地面侧向力方向相反。
32
第四节 汽车操纵稳定性与悬架的关系
车厢侧倾时不同形式悬架所引起的车轮外倾角的γ变化
单横臂悬架前轮外倾角与地面侧向力方向相同(或相反)。
33
第四节 汽车操纵稳定性与悬架的关系
a y Gs
M r Fsy h
h1bs h2 as h hs HN hs L
18
第四节 汽车操纵稳定性与悬架的关系
2)侧倾后悬挂质量重力引起的侧倾力矩MΦrⅡ
M ΦrΠ Gs e Gs h r
19
第四节 汽车操纵稳定性与悬架的关系
3)变形转向角(悬架导向杆系变形引起的车轮转角的变化)。
2
第四节 汽车操纵稳定性与悬架的关系
一、车厢侧倾
1.车厢侧倾轴线 1)侧倾轴线:车厢相对于地面转动时的瞬时轴线; 2)侧倾中心:侧倾轴线通过前、后轴处横断面上的瞬时转 动中心;其位置由悬架导向机构决定,常用图解法确定。 侧倾轴线是侧倾中心的连线。 想一想:先确定侧倾轴线再确定侧倾中心,还是先
K l 2Ks Δss ss Δst st
2
ΔFZ ΔQ
Kl
ss Δst K s Δss 2 st
ss K l 2K s st
2
Δss
ss Δst st
m K l 2k s n
12
第四节 汽车操纵稳定性和悬架的关系
9
第四节 汽车操纵稳定性与悬架的关系
Q ks ss
Δss m Δst n
Fa ΔFa
汽车理论课后习题答案第五章汽车的操纵稳定性
第五章5. 1 轿车(每个)前轮胎的侧偏刚度为-50176N/ rad、外倾刚度为-7665N/rad。
若轿车向左转弯,将使两前轮均产生正的外倾角,其大小为40。
设侧偏刚度与外倾刚度均不受左、右轮载荷转移的影响.试求由外倾角引起的前轮侧偏角。
答: 由题意:F Y=^"k =■■故由外倾角引起的前轮侧偏角::二- k k= _ •05. 2 6450轻型客车在试验中发现过多转向和中性转向现象,工程师们在前悬架上加装前横向稳定杆以提高前悬架的侧倾角刚度,结果汽车的转向特性变为不足转向。
试分析其理论根据(要求有必要的公式和曲线)答: 稳定性系数:K=m bL g k Jk、k2变化,原来K兰0,现在K>0,即变为不足转向。
5. 3汽车的稳态响应有哪几种类型?表征稳态响应的具体参数有哪些?它们彼此之间的关系如何(要求有必要的公式和曲线)?答:汽车稳态响应有三种类型:中性转向、不足转向、过多转向。
几个表征稳态转向的参数:1前后轮侧偏角绝对值之差二转向半径的比R/R。
;3.静态储备系数S.M.彼此之间的关系见参考书公式(5-13) (5-16) (5-17 )。
5. 4举出三种表示汽车稳态转向特性的方法,并说明汽车重心前后位置和内、外轮负荷转移如何影响稳态转向特性?答:方法:1. :丄时为不足转向,:•.「-「• 时为中性转向,二丘<0时为过多转向;2. R/R0>1时为不足转向,R/R0=1时为中性转向,R/R0V1时为过多转向;3 . S.M.>0时为不足转向,S.M.=O时为中性转向,S.M.vO时为过多转向。
汽车重心前后位置和内、外轮负荷转移使得汽车质心至前后轴距离a、b发生变化,K也发生变化。
5.5汽车转弯时车轮行驶阻力是否与直线行驶时一样?答:否,因转弯时车轮受到的侧偏力,轮胎产生侧偏现象,行驶阻力不一样。
5. 6主销内倾角和后倾角的功能有何不同?答:主销外倾角可以产生回正力矩,保证汽车直线行驶;主销内倾角除产生回正力矩外,还有使得转向轻便的功能。
《汽车理论》教案5-汽车操纵稳定性
《汽车理论 A》教案(章节备课)
章节 教学目的 和要求
教学重点
教学难点
教学进程 (含教学 内容、时间 分配、教学 方法、辅助 手段)
第五章 汽车的操纵稳定性
理论授课时间 14 学时
1. 了解汽车操纵稳定性的评价体系
2. 掌握车辆坐标系和轮胎坐标系的有关术语
3. 掌握轮胎侧偏现象产生的原因和影响侧偏特性的因素
达式
3
《汽车理论 A》教案
Kl
2Kl
2ks
m 2 n
悬架侧倾角刚度的概念和表达式
Kr
1 2
KlB2
1 2
ks
Bm n
2
4)车厢的侧倾角
车厢的侧倾角对操纵稳定性和行驶平顺性的影响
侧倾力矩的三部分的计算与分析
侧倾力矩的计算是本章的难点,强调理解侧倾时车厢的受力分
析 (2)侧倾时垂直载荷在左、右侧车轮上的重新分配及其对稳态 响应的影响(25’) 1)侧倾时垂直载荷在左、右侧车轮上的重新分配分析 2)车轮垂直载荷重新分配对轮胎侧偏刚度和稳态响应的影响 提出实际问题:横向稳定杆起什么作用?为何通常在轿车的前 悬架加装横向稳定杆?
悬架,请问该车的前、后悬架悬架应采用哪种悬架?分析说明其道理。 什么是侧倾转向?为何有些轿车后轮也设计有前束角? 什么是变形转向?为何回正力矩作用的总效果一般是趋向不足转向? 第 7 次课预习思考题 什么是汽车的纵向稳定性?汽车纵向稳定性条件是什么? 什么是汽车的横向稳定性?汽车横向稳定性条件是什么? 什么是侧向稳定性系数?比较各种类型车辆的侧向稳定性系数,及其影响因素
5. 了解汽车操纵稳定性与悬架的关系
6. 掌握汽车行驶的纵向和横向稳定性条件
汽车理论(第五版) 第五章(6-9节)
7
第六节 汽车操纵稳定性与传动系的关系
二、地面切向反作用力控制转向特性 的基本概念简介
1.切向力对 r的影响 切向力对ω 切向力对
8
第六节 汽车操纵稳定性与传动系的关系
2.切向力控制方法 切向力控制方法
1)总切向反作用力控制
ABS就是总制动力控制,保证较佳的滑动率,提 就是总制动力控制,保证较佳的滑动率, 就是总制动力控制 高制动时汽车的方向稳定性。 高制动时汽车的方向稳定性。 TCS 是总驱动力控制,防止出现过大的滑转率, 是总驱动力控制,防止出现过大的滑转率, 提高驱动时汽车的方向稳定性。 提高驱动时汽车的方向稳定性。
பைடு நூலகம்
41
第七节 提高操纵稳定性的电子控制系统
六、装有VSC系统汽车的试验结果
42
第七节 提高操纵稳定性的电子控制系统
六、装有VSC系统汽车的试验结果
43
第七节 提高操纵稳定性的电子控制系统
本节内容结束
下一节
44
第五章 汽车的操纵稳定性
第八节
汽车的侧翻
返回目录
45
第八节 汽车的侧翻
汽车侧翻是指汽车在行驶过程中绕其纵轴线转动90° 汽车侧翻是指汽车在行驶过程中绕其纵轴线转动 ° 或更大的角度, 或更大的角度,以至车身与地面相接触的一种极其危险的 侧向运动。 侧向运动。
28
第七节 提高操纵稳定性的电子控制系统
起始车速为110km/h时正弦 时正弦 起始车速为
起始车速为140km/h时正弦 时正弦 起始车速为
& 转向角输入下的 β − β 曲线
& 转向角输入下的 β − β曲线
29
第七节 提高操纵稳定性的电子控制系统
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
版权所有者:南航赵又群
33
二、稳态响应
3.表征稳态响应的参数(1) (α1 α2 ) .
汽车理论(PowerPoint版)
版权所有者:南航赵又群
34
※ 作业
证明 :
R=
δ (α1 α2 )
L
汽车理论(PowerPoint版)
版权所有者:南航赵又群
35
二、稳态响应
3.表征稳态响应的参数 .
R (2)转向半径的比值 R 0
22
五、回正力矩 Tz = Fy × e
汽车理论(PowerPoint版)
版权所有者:南航赵又群
23
五、回正力矩
汽车理论(PowerPoint版)
版权所有者:南航赵又群
24
五、回正力矩
汽车理论(PowerPoint版)
版权所有者:南航赵又群
25
第二节结束! 第二节结束!
汽车理论(PowerPoint版)
版权所有者:南航赵又群
52
汽车理论(PowerPoint版)
版权所有者:南航赵又群
1
引 言
1. 操纵稳定性 2. 操纵稳定性涉及工况 3. 操纵稳定性的重要性
汽车理论(PowerPoint版)
版权所有者:南航赵又群
2
第一节 概述
思考题 如何判断汽车操纵稳定性好坏? 本节应掌握的内容 1. 操纵稳定性的评价指标。 2. 车辆坐标系。 3. 稳态转向特性。
—稳定性因数(s2m-2)
K
汽车理论(PowerPoint版) 版权所有者:南航赵又群 30
二、稳态响应
2.稳态响应的三种类型 .
ωr u K=0 — 中性转向: = δ s L
ωr u K>0 — 不足转向: < ,特征车速 uch = 1 δ s L K ωr u K<0 — 过多转向: > ,临界车速 u = 1 cr δ s L K
1.车辆坐标系
汽车理论(PowerPoint版)
版权所有者:南航赵又群
5
二、车辆坐标系与时域响应
2.时域响应
Steady state Transient stat
3.稳态响应特性
不足转向 中性转向 过多转向
汽车理论(PowerPoint版)
版权所有者:南航赵又群
6
二、车辆坐标系与时域响应
4.瞬态响应特性
汽车理论(PowerPoint版)
版权所有者:南航赵又群
40
三、瞬态响应
(2)表征瞬态品质好坏的参数 h b)阻尼比 ξ = 2ω0 m′ c)反应时间 τ =
Φ
ω
ω arctg Φ d)峰值反应时间 ξω0 ε= ω
汽车理论(PowerPoint版)
版权所有者:南航赵又群
41
三、瞬态响应
2. r瞬态响应的稳定条件 : . ω
∠ (4)低频时的相位滞后角应小些, Φ f =0.1 → 0 。
(5)高频时的相位滞后角应小些, Φ f =0.6 →小些 。 ∠
汽车理论(PowerPoint版)
版权所有者:南航赵又群
47
汽车理论(PowerPoint版)
版权所有者:南航赵又群
48
汽车理论(PowerPoint版)
版权所有者:南航赵又群
(1) ≤ 1 时,只要 ξω > 0 就收敛。 ξ 2 ω2 (2) > 1 时, 0 应为正值,即 ω0 > 0 。 ξ 过多转向汽车, 0 = 0 的车速为临界车速 u 。 ω2 cr 2 u > u ω < 0 ,不稳定。
cr 0
1 ucr = ,与稳态响应的临界车速是一样的。 K
汽车理论(PowerPoint版)
一、基本概念 二、轮胎坐标系
汽车理论(PowerPoint版)
版权所有者:南航赵又群
13
三、侧偏现象/侧偏曲线
1.侧偏力—车轮中心 沿Y轴方向作用有 侧向力 Fy
汽车理论(PowerPoint版)
版权所有者:南航赵又群
14
2.侧偏现象—车轮行驶方向偏离车轮平面的方向。
汽车理论(PowerPoint版)
9
五、时频响应的评价指标
2.方向盘角阶跃输入下的瞬态响应 (1) ωr t 或 ωr ×100% t 曲线 ωr0 (2)反应时间 τ (3)衰减圆频率 ω = 2π T 3.横摆角速度频率响应特性 (1)共振峰频率f (2)1 Hz时的相位滞后角
汽车理论(PowerPoint版)
版权所有者:南航赵又群
+ Ceξω0t si (ω + Φ) n t
版权所有者:南航赵又群
38
或
ωr (t ) =
B0δ 0
2 ω0
+ A eξω0t cosωt + A2eξω0t sin ωt 1
汽车理论(PowerPoint版)
版权所有者:南航赵又群
39
三、瞬态响应
(2)表征瞬态品质好坏的参数 a)固有圆频率
c ω0 = m′
版权所有者:南航赵又群
8
第一节 概述
四、汽车实验的两种评价方法
1.实车试验/驾驶模拟器 2.客观评价/主观评价
五、时频响应的评价指标
1.方向盘角阶跃输入下的稳态响应 ω ω (1) δ _ u 增益曲线 (2) δ 增益
r
r
s
a
s
(3)稳定性因数 K
汽车理论(PowerPoint版)
版权所有者:南航赵又群
10
第一节结束! 第一节结束!
汽车理论(PowerPoint版)
版权所有者:南航赵又群
11
第二节 轮胎的侧偏特性
思考题 轮胎侧偏特性在汽车建模中的重要性 ? 本节应掌握的内容 1. 轮胎的侧偏特性 2. 侧偏现象 3. 附着椭圆
汽车理论(PowerPoint版)
版权所有者:南航赵又群
12
第二节 轮胎的侧偏特性
汽车理论(PowerPoint版)
版权所有者:南航赵又群
31
二、稳态响应Βιβλιοθήκη 2.稳态响应的三种类型 .
汽车理论(PowerPoint版)
版权所有者:南航赵又群
32
二、稳态响应
2.稳态响应的三种类型 .
汽车应具有适度的不足转 向特性?? 前轮转角:δ ≈ L
R
转向半径:R ≈ L
δ
汽车理论(PowerPoint版)
r
(1)推导 瞬态时,二自由度方程的两个未知数可以是 ωr 和 β ,通过消元法消去 β ,得到ω 的一元二阶常系 r 数微分方程。 由常微分方程的性质或解法—先得到其通解和特 解,最后得到正常汽车(小阻尼)的 ωr (t ) 。
ωr (t ) =
汽车理论(PowerPoint版)
B δ0 0
2 ω0
反应时间—
超调量— ωrs ωr0 ×100% 波动频率— ω = 2π T 稳定时间—
τ 、ε
ωr = (95%105%)ωr0
汽车理论(PowerPoint版)
版权所有者:南航赵又群
7
三、人—车闭路系统
1.开路( 1.开路(环)系统 开路 2.闭 2.闭路(环)系统
汽车理论(PowerPoint版)
版权所有者:南航赵又群
42
四、频率响应特性
1. r 频率响应特性 :幅频特性、相频特性 . ω 2.富氏变换: .富氏变换:
δ
(δ sw )
汽车
A( f ) Φ( f )
2 & &&r + 2ω0ξωr + ω0ωr = B1δ + B0δ & ω
2 ( jω)2ωr (ω) + 2ω0ξ ( jω)ωr (ω) + ω0ωr (ω) = B1( jω)δ (ω) + B0δ (ω)
版权所有者:南航赵又群
26
第三节 线性二自由度汽车模型对前轮角 输入的响应
思考题 怎样简化为……模型 ? 本节应掌握的内容 1. 假设条件 2. 公式推导 3. 时域响应特性、频域响应特性
汽车理论(PowerPoint版)
版权所有者:南航赵又群
27
一、数学模型
1.假设 .
前轮转角输入 平面运动 线性轮胎 两轮摩托车。
汽车理论(PowerPoint版)
版权所有者:南航赵又群
45
汽车理论(PowerPoint版)
版权所有者:南航赵又群
46
四、频率响应特性
3.评价汽车操纵稳定性的5个参数 .评价汽车操纵稳定性的 个参数
(1)A( f )
f =0
,即稳态增益,a 。
r
(2)共振峰频率 f 。 (3)共振时的增幅比b a,对应超调量。
汽车理论(PowerPoint版)
版权所有者:南航赵又群
28
一、数学模型
2.模型 .
1 & (k1 + k2 )β + (ak1 bk2 )ωr kδ = m(v + uωr ) u 1 2 & (ak1 bk2 )β + a k1 + b2k2 ωr ak1δ = I zωr u
δ (ω) --
δ (t ) 的富氏变换。
H( jω)ωr δ
B1 jω + B0 ωr (ω) = = 2 2 δ (ω) ω + 2ω0ξjω +ω0 = B(ω) + C(ω) j
版权所有者:南航赵又群 44
汽车理论(PowerPoint版)
四、频率响应特性
2.富氏变换: .富氏变换:
幅频特性: 幅频特性 A(ω) = [B(ω)]2 + [C(ω)]2 要求共振频率高些,通频带宽些, 要求共振频率高些,通频带宽些,以保证操纵平 稳。 C(ω) 相频特性: 相频特性 Φ(ω) = arctg B(ω) 要求相位差小些,以保证反映灵敏。 要求相位差小些,以保证反映灵敏。