奥本海姆-信号与系统-第6章
奥本海姆目录
《信号与系统》第1章信号与系统1.0 引言1.1 连续时间和离散时间信号1.1.1 举例与数学表示1.1.2 信号能量与功率1.2 自变数的变换1.2.1 自变数变换举例1.2.2 周期信号1.2.3 偶信号与奇信号1.3 指数信号与正弦信号1.3.1 连续时间复指数信号与正弦信号1.3.2 离散时间复指数信号与正弦信号1.3.3 离散时间复指数序列的周期性质1.4 单位冲激与单位阶跃函数1.4.1 离散时间单位脉冲和单位阶跃序列1.4.2 连续时间单位阶跃和单位冲激函数1.5 连续时间和离散时间系统1.5.1 简单系统举例1.5.2 系统的互联1.6 基本系统性质1.6.1 记忆系统与无记忆系统1.6.2 可逆性与可逆系统1.6.3 因果性1.6.4 稳定性1.6.5 时不变性1.6.6 线性1.7 小结习题第2章线性时不变系统2.0 引言2.1 离散时间LTI系统:卷积和2.1.1 用脉冲表示离散时间信号2.1.2 离散时间LTI系统的单位脉冲响应及卷积和表示2.2 连续时间LTI系统:卷积积分2.2.1 用冲激表示连续时间信号2.2.2 连续时间LTI系统的单位冲激响应及卷积积分表示2.3 线性时不变系统的性质2.3.1 交换律性质2.3.2 分配律性质2.3.3 结合律性质2.3.4 有记忆和无记忆LTI系统2.3.5 LTL系统的可逆性2.3.6 LTI系统的因果性2.3.7 LTI系统的稳定性2.3.8 LTI系统的单位阶跃响应2.4 用微分和差分方程描述的因果LTI系统2.4.1 线性常系数微分方程2.4.2 线性常系数差分方程2.4.3 用微分和差分方程描述的一阶系统的方框图表示2.5 奇异函数2.5.1 作为理想化短脉冲的单位冲激2.5.2 通过卷积定义单位冲激2.5.3 单位冲激偶和其它的奇异函数2.6 小结习题第3章周期信号的傅里叶级数表示3.0 引言3.1 历史回顾3.2 LTI系统对复指数信号的响应3.3 连续时间周期信号的傅里叶级数表示3.3.1 成谐波关系的复指数信号的线性组合3.3.2 连续时间周期信号傅里叶级数表示的确定3.4 傅里叶级数的收敛3.5 连续时间傅里叶级数性质3.5.1 线性3.5.2 时移性质3.5.3 时间反转3.5.4 时域尺度变换3.5.5 相乘3.5.6 共轭及共轭对称性3.5.7 连续时间周期信号的帕斯瓦尔定理3.5.8 连续时间傅里叶级数性质列表3.5.9 举例3.6 离散时间周期信号的傅里叶级数表示3.6.1 成谐波关系的复指数信号的线性组合3.6.2 周期信号傅里叶级数表示的确定3.7 离散时间傅里叶级数性质3.7.1 相乘3.7.2 一阶差分3.7.3 离散时间周期信号的帕斯瓦尔定理3.7.4 举例3.8 傅里叶级数与LTI系统3.9 滤波3.9.1 频率成形滤波器3.9.2 频率选择性滤波器3.10 用微分方程描述的连续时间滤波器举例3.10.1 简单RC低通滤波器3.10.2 简单RC高通滤波器3.11 用差分方程描述的离散时间滤波器举例3.11.1 一阶递归离散时间滤波器3.11.2 非递归离散时间滤波器3.12 小结习题第4章连续时间傅里叶变换4.0 引言4.1 非周期信号的表示:连续时间傅里叶变换4.1.1 非周期信号傅里叶变换表示的导出4.1.2 傅里叶变换的收敛4.1.3 连续时间傅里叶变换举例4.2 周期信号的傅里叶变换4.3 连续时间傅里叶变换性质4.3.1 线性4.3.2 时移性质4.3.3 共轭及共轭对称性4.3.4 微分与积分4.3.5 时间与频率的尺度变换4.3.6 对偶性4.3.7 帕斯瓦尔定理4.4 卷积性质4.4.1 举例4.5 相乘性质4.5.1 具有可变中心频率的频率选择性滤波4.6 傅里叶变换性质和基本傅里叶变换对列表4.7 由线性常系数微分方程表征的系统4.8 小结习题第5章离散时间傅里叶变换5.0 引言5.1 非周期信号的表示:离散时间傅里叶变换5.1.1 离散时间傅里叶变换的导出5.1.2 离散时间傅里叶变换举例5.1.3 关于离散时间傅里叶变换的收敛问题5.2 周期信号的傅里叶变换5.3 离散时间傅里叶变换性质5.3.1 离散时间傅里叶变换的周期性5.3.2 线性5.3.3 时移与频移性质5.3.4 共轭与共轭对称性5.3.5 差分与累加5.3.6 时间反转5.3.7 时域扩展5.3.8 频域微分5.3.9 帕斯瓦尔定理5.4 卷积性质5.4.1 举例5.5 相乘性质5.6 傅里叶变换性质和基本傅里叶变换对列表5.7 对偶性5.7.1 离散时间傅里叶级数的对偶性5.7.2 离散时间傅里叶变换和连续时间傅里叶级数之间的对偶性5.8 由线性常系数差分方程表征的系统5.9 小结习题第6章信号与系统的时域和频域特性6.0 引言6.1 傅里叶变换的模和相位表示6.2 LTI系统频率响应的模和相位表示6.2.1 线性与非线性相位6.2.2 群时延6.2.3 对数模和波特图6.3 理想频率选择性滤波器的时域特性6.4 非理想滤波器的时域和频域特性讨论6.5 一阶与二阶连续时间系统6.5.1 一阶连续时间系统6.5.2 二阶连续时间系统6.5.3 有理型频率响应的波特图6.6 一阶与二阶离散时间系统6.6.1 一阶离散时间系统6.6.2 二阶离散时间系统6.7 系统的时域分析与频域分析举例6.7.1 汽车减震系统的分析6.7.2 离散时间非递归滤波器举例6.8 小结习题第7章采样7.0 引言7.1 用信号样本表示连续时间信号:采样定理7.1.1 冲激串采样7.1.2 零阶保持采样7.2 利用内插由样本重建信号7.3 欠采样的效果:混迭现象7.4 连续时间信号的离散时间处理7.4.1 数字微分器7.4.2 半采样间隔延时7.5 离散时间信号采样7.5.1 脉冲串采样7.5.2 离散时间抽取与内插7.6 小结习题第8章通信系统8.0 引言8.1 复指数与正弦幅度调制8.1.1 复指数载波的幅度调制8.1.2 正弦载波的幅度调制8.2 正弦AM的解调8.2.1 同步解调8.2.2 异步解调8.3 频分多路复用8.4 单边带正弦幅度调制8.5 用脉冲串作载波的幅度调制8.5.1 脉冲串载波调制8.5.2 时分多路复用8.6 脉冲幅度调制8.6.1 脉冲幅度已调信号8.6.2 在PAM系统中的码间干扰8.6.3 数字脉冲幅度和脉冲编码调制8.7 正弦频率调制8.7.1 窄带频率调制8.7.2 宽带频率调制8.7.3 周期方波调制信号8.8 离散时间调制8.8.1 离散时间正弦幅度调制8.8.2 离散时间调制转换8.9 小结习题第9章拉普拉斯变换9.0 引言9.1 拉普拉斯变换9.3 拉普拉斯反变换9.4 由零极点图对傅里叶变换进行几何求值9.4.1 一阶系统9.4.2 二阶系统9.4.3 全通系统9.5 拉普拉斯变换的性质9.5.1 线性9.5.2 时移性质9.5.3 S域平移9.5.4 时域尺度变换9.5.5 共轭9.5.6 卷积性质9.5.7 时域微分9.5.8 S域微分9.5.9 时域积分9.5.10 初值与终值定理9.5.11 性质列表9.6 常用拉普拉斯变换对9.7 用拉普拉斯变换分析和表征LTI系统9.7.1 因果性9.7.2 稳定性9.7.3 由线性常系数微分方程表征的LTI系统9.7.4 系统特性与系统函数的关系举例9.7.5 巴特沃兹滤波器9.8 系统函数的代数属性与方框图表示9.8.1 LTI系统互联的系统函数9.8.2 由微分方程和有理系统函数描述的因果LTI系统的方框图表示9.9单边拉普拉斯变换9.9.1 单边拉普拉斯变换举例9.9.3 利用单边拉普拉斯变换求解微分方程9.10 小结习题第10章Z变换10.0 引言10.1 Z变换10.2 Z变换的收敛域10.3 Z反变换10.4 由零极点图对傅里叶变换进行几何求值10.4.1 一阶系统10.4.2 二阶系统10.5 Z变换的性质10.5.1 线性10.5.2 时移性质10.5.3 Z域尺度变换10.5.4 时间反转10.5.5 时间扩展10.5.6 共轭10.5.7 卷积性质10.5.8 Z域微分10.5.9 初值定理10.5.10 性质小结10.6 几个常用Z变换对10.7 利用Z变换分析与表征LTI系统10.7.1 因果性10.7.2 稳定性10.7.3 由线性常系数差分方程表征的LTI系统10.7.4 系统特性与系统函数的关系举例10.8 系统函数的代数属性与方框图表示10.8.1 LTI系统互联的系统函数10.8.2 由差分方程和有理系统函数描述的因果LTI系统的方框图表示10.9 单边Z变换10.9.1 单边Z变换和单边Z反变换举例10.9.2 单边Z变换性质10.9.3 利用单边Z变换求解差分方程10.10 小结习题第11章线性反馈系统11.0 引言11.1 线性反馈系统11.2 反馈的某些应用及结果11.2.1 逆系统设计11.2.2 非理想组件的补偿11.2.3 不稳定系统的稳定11.2.4 采样数据反馈系统11.2.5 跟踪系统11.2.6 反馈引起的不稳定11.3 线性反馈系统的根轨迹分析法11.3.1 一个例子11.3.2 死循环极点方程11.3.3 根轨迹的端点:K=0和|K|=+∞时的死循环极点11.3.4 角判据11.3.5 根轨迹的性质11.4 奈奎斯特稳定性判据11.4.1 围线性质11.4.2 连续时间LTI反馈系统的奈奎斯特判据11.4.3 离散时间LTI反馈系统的奈奎斯特判据11.5 增益和相位裕度11.6 小结。
信号与系统奥本海姆原版PPT第六章
6 Time and frequency characterization of S&S
6 Time and frequency characterization of S&S
6 Time and frequency characterization of S&S
Problems: 6.5
6.23
F x(t ) X ( j )
X ( j ) | X ( j ) | e jX ( j )
| X ( j ) | Magnitude Spectrum e jX ( j ) Phase Spectrum
6 Time aБайду номын сангаасd frequency characterization of S&S
6 Time and frequency characterization of S&S
6 Time and frequency characterization of S&S
6.3 Time-Domain Properties of Ideal Frequencyselective Filters Lowpass filter: (1) Continous time:
6 Time and frequency characterization of S&S
6. Time and Frequency Characterization of Signals and Systems 6.1 The Magnitude-phase Representation of the Fourier Transform For signal x(t) :
6 Time and frequency characterization of S&S
信号与系统课件(奥本海姆+第二版)+中文课件.pdf

解:因为 x[n] = e jω0n = cos ω0n + j sin ω0n (欧拉公式)
则有 e jω0n = 1
∑ ∑ ∞
∞
E∞ = x[n] 2 = 1= ∞
n=−∞
n=−∞
∑ P∞
=
lim
N→∞
1N 2N +1n=−N
x[n] 2
= lim N→∞
1 ×(2N 2N +1
+1)
=1
所以是功率信号
控制
执行机构
网络
图 1 控制系统
R+
uc (t)
x (t)
C
uc (t)
-
t
图 2 RC电路
6 / 94
二、信号的分类 信号的分类方法很多。
1、确定性信号与随机信号 按信号与时间的函数关系来分,信号可分为确定性信号与随
机信号。 1)、确定性信号——指能够表示为确定的时间函数的信号。 当给定某一时间值时,信号有确定的数值。 例如:正弦信号、指数信号和各种周期信号等。 2)、随机信号——不是时间t的确定函数的信号。 它在每一个确定时刻的分布值是不确定的。 例如:电器元件中的热噪声等。
11 / 94
5、连续时间信号和离散时间信号——按自变量的取值是否连续来分。
1、连续时间信号——自变量是连续可变的,因此信号在自变量的连续值上 都有定义。我们用t表示连续时间变量,用圆括号(.)把自变量括在里面。例 如 图一的 x(t)。
x (t)
x [n]
X[1] X[-1]
0
t
图一 连续时间信号
1)、时间特性——波形、幅度、重复周期及信号变化的快慢等。 ω
2)、频率特性——振幅频谱和相位频谱。即从频域 来研究信号的变化情 况。
信号与系统奥本海姆版复习要点
第一章:Singnals and System(信号与系统)1-1:continuous-time and discrete-time signals(连续时间与离散时间信号)信号:信息的载体。
在信号与系统分析中,信号的表达式为函数(functions)P3:Signals are represented mathematically as functions of one or more independent variables(独立自变量)。
例如:关于某导线电流强度对应不同时间的函数I(t);等比数列的某一个数对应其序号的函数a[n]=b^n。
自变量的定义域为连续的时间段(有限或无限)的信号(函数)称为连续时间信号x(t)自变量的定义域为间断的时间点(一般地,归一为整数点…-1,0,1,2…)的信号称为离散时间信号x[n],又叫序列(sequences)。
两者有相似处,离散时间函数(又称为离散时间序列)可以看作连续时间函数对整数点时间进行抽样得到,但两者计算上有很大区别。
信号(函数)对应某一自变量值的信号函数值大小称为信号的幅度(phenomenon)。
例如x(t)=2t,在t=3时x(t)=x(3)=6就是此刻的幅度。
Signal energy and power(信号的能量与功率)把信号看作电流,该电流在某一段时间内流过1欧姆的电阻产生的能量和平均功率(average power)便是信号在该段时间的能量与功率。
因此可得在t1~~t2内信号x(t)的能量为:E=∫(t1~t2)(|x(t)|^2)dt,而相应这段时间的功率则为P=E/(t2-t1)信号在整个定义域的能量E∞=(limT→∞)∫(-T~T)(|x(t)|^2)dt信号在整个定义域的平均功率P∞=(limT→∞)(1/2T)∫(-T~T)(|x(t)|^2)dt相应的,对于离散时间信号则有P6-7(1,7)(1,9)(这个东西要输入太困难了,呵呵)显然,对于一个信号在无穷区间的能量与平均功率有三种可能:(1)平均功率无穷大,总能量无穷大(2)平均功率有限,总能量无穷大(3)总能量有限,平均功率无穷小(也是有限)1-2:Transformations of the independent variable(自变量的变换)自变量的变换就是对信号x(t)或x[n]的自变量t或n进行相应变换,由此会影响信号。
信号与系统奥本海姆英文版课后答案chapter6
6.12. Using the Bode magnitude plot, specified in Figure P6.12(a). we may obtain an expression For H1 (j ω ). The figure shows that H1 (j ω ) has the break frequencies ω1 =1, ω2 =8,And
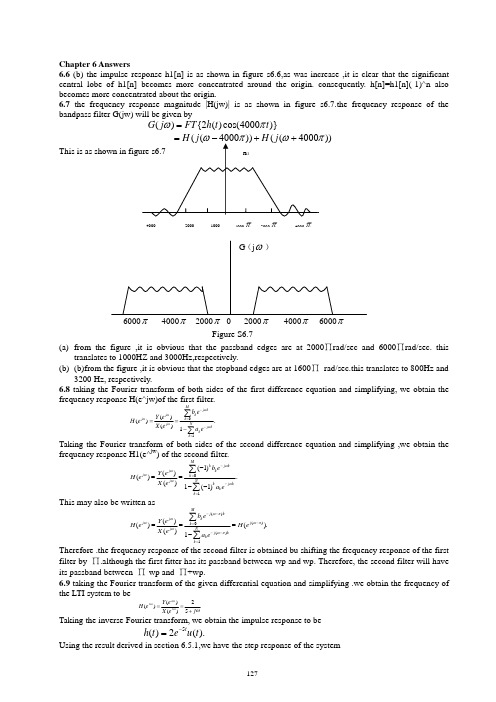
G ( jω ) = FT {2h(t ) cos(4000π t )} = H ( j (ω − 4000π )) + H ( j (ω + 4000π ))
H(j
This is as shown in figure s6.7
-4000
-2000
-1000
1000
π
2000
π
4000
π
G (j ω )
ω3 =40. The frequency response rises as 20dB/decade after ω1 . At ω2 ,this rise is canceled by a -20 dB/decade contribution. Finally, at ω3 ,an additional -20 dB/decade. Contribution results in the
k =0 N k k =1
M
− j (ω −π ) k
1 − ∑ ak e
= H (e j (ω −π ) ).
[指南]奥本海姆信号与系统中文版课后习题答案
![[指南]奥本海姆信号与系统中文版课后习题答案](https://img.taocdn.com/s3/m/48db5835e3bd960590c69ec3d5bbfd0a7956d51e.png)
1.对一个LTI 系统,我们已知如下信息:输入信号2()4()t x t e u t =-;输出响应22()()()t t y t e u t e u t -=-+ (a) 确定系统的系统函数H(s)及收敛域。
(b) 求系统的单位冲激响应h(t)(c) 如果输入信号x(t)为(),t x t e t -=-∞<<+∞ 求输出y(t)。
解:(a) 4114(),Re{}2,(),2Re{}2222(2)(2)X s s Y s s s s s s s ---=<=+=<-<--+-+1(),Re{}22H s s s =>-+ (b) 2()()t h t e u t -=(c) ()2()()t t y t e e u d e τ+∞---τ--∞=ττ=⎰; ()(1)t t y t H e e --=-=.2. 已知因果全通系统的系统函数1()1s H s s -=+,输出信号2()()t y t e u t -=(a) 求产生此输出的输入信号x(t).(b) 若已知dt ∞∞<∞⎰+-|x(t)|,求输出信号x(t).(c) 已知一稳定系统当输入为2()t e u t -时,输出为上述x(t)中的一个,确定是哪个?求出系统的单位冲激响应h(t).解:(a)1()2Y s s =+。
Re{}2s >-,()1()()(1)(2)Y s s X s H s s s +==-+由于()H s 的ROC 为Re{}1s >-,()X s ∴的ROC 为2Re{}1s -<<或Re{}1s >若 1ROC 为-2<Re{s}<1,则2112()()()33t t x t e u t e u t -=--若2ROC 为Re{s}>1,221()(2)()3tt x t e e u t -=+ (b) 若dt ∞∞<∞⎰+-|x(t)|,则只能是1()()x t x t =即:212()()()33t t x t e u t e u t -=--(c) 212()()()()33t t y t x t e u t e u t -==--; 1(),2Re{}1(1)(2)s Y s s s s +=-<<-+()1()()1Y s s H s X s s +∴==-, 这就是(a)中系统的逆系统。
奥本海姆《信号与系统》(第2版)知识点归纳考研复习(下册)

第7章采样第8章通信系统第9章拉普拉斯变换第10章Z变换第11章线性反馈系统第7章采样7.2连续时间信号x(t)从一个截止频率为的理想低通滤波器的输出得到,如果对x(t)完成冲激串采样,那么下列采样周期中的哪一些可能保证x(t)在利用一个合适的低通滤波器后能从它的样本中得到恢复?7.3在采样定理中,采样频率必须要超过的那个频率称为奈奎斯特率。
试确定下列各信号的奈奎斯特率:7.4设x(t)是一个奈奎斯特率为ω0的信号,试确定下列各信号的奈奎斯特率:7.5设x(t)是一个奈奎斯特率为ω0的信号,同时设其中。
7.6在如图7-1所示系统中,有两个时间函数x1(t)和x2(t)相乘,其乘积W (t)由一冲激串采样,x1(t)带限于ω17.7信号x(t)用采样周期T经过一个零阶保持的处理产生一个信号x0(t),设x1(t)是在x(t)的样本上经过一阶保持处理的结果,即7.8有一实值且为奇函数的周期信号x(t),它的傅里叶级数表示为7.9考虑信号x(t)为7.10判断下面每一种说法是否正确。
7.11设是一连续时间信号,它的傅里叶变换具有如下特点:7.12有一离散时间信号其傅里叶变换具有如下性质:7.13参照如图7-7所示的滤波方法,假定所用的采样周期为T,输入xc(t)为带限,而有7.14假定在上题中有重做习题7.13。
7.15对进行脉冲串采样,得到若7.16关于及其傅里叶变换7.17考虑理想离散时间带阻滤波器,其单位脉冲响应为频率响应在条件下为7.18假设截止频率为π/2的一个理想离散时间低通滤波器的单位脉冲响应是用于内插的,以得到一个2倍的增采样序列,求对应于这个增采样单位脉冲响应的频率响应。
7.19考虑如图7-11所示的系统,输入为x[n],输出为y[n]。
零值插入系统在每一序列x[n]值之间插入两个零值点,抽取系统定义为其中W[n]是抽取系统的输入序列。
若输入x[n]为试确定下列ω1值时的输出y[n]:7.20有两个离散时间系统S1和S2用于实现一个截止频率为π/4的理想低通滤波器。
奥本海姆《信号与系统》第二版信号与系统答案

4 3
(e)
x 2[n] = e
j(
n
2
) 8
,
x 2[n] =1. therefore, E = x 2[n] = ,
2
Байду номын сангаас
2
P
N = lim 1 N 2 N 1 n N
n
x 2[n]
2
N 1 lim 1 1. N 2 N 1 n N
(d)
1
T
1 COS (2t ) 1 dt 2 2
n
2 1 u[n] . Therefore, E = [n] 2 1 1 u[n] , [ n ] [ n ] x1 x 1 x n0 4 4 2 P =0,because E < .
v 1
1
(b) Since (c)
x1(t) is an odd signal,
x [ n] x
v 2
is zero for all values of t.
1 [ n] v x3 2
n n 1 1 1 [ n ] [ n ] u [ n 3] u [ n 3] x1 x1 2 2 2
1
(b) {x (t )} 2 cos( ) cos(3t 2 ) cos(3t ) e 0t cos(3t 0) 2 (c) {x (t )} e t sin(3 t ) e t sin(3t ) 3 2 (d) 1.9. (a)
Signals & Systems
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
即z
lim k f (k )
k
Rx 2
可见左边序列的收敛域是半径为 R x 2的圆内部分。 6、双边序列的收敛域
F ( z)
k 1
z平面
f (k ) z k f (k ) z k f (k ) z k
k k 0
故只有 Rx1 Rx 2 时,两个收敛域才有 重叠,z变换存在收敛域为 Rx1 z Rx 2
z a (k ) za
k
z a
z a
第6章 离散系统的Z域分析
6.2
1、线性性质
if
Z变换性质
f 2 (k ) F2 ( z)
式中a,b为任意常 数。叠加后新的 z变换的收敛域至 少是原两个z变换 收敛域重叠部分
f1 (k ) F1 ( z )
then af1 (k ) bf2 (k ) aF 1 ( z ) bF 2 ( z)
z e j 1
z e j 1
a
z 1
第6章 离散系统的Z域分析
2、移位特性
(1)双边z变换 若f (k )是双边序列,其双边z变换为 f (k ) F ( z )
F[ f (k )]
k
f (k ) z k
f (1 n) z1n f (n) z n f (1 n) z 1n
z n ( ) a n 1
k
f (k )z k a z
k k
1
k
n k
n
n n a z
1
z 1即 z a,有 a z Z[ak (k 1)] a z z za 1 a z k 收敛域 即 a ( k 1) za
Fs ( s)
k
f (t ) (t kT )e dt f ( kT )e skT
st
k
f (t )(t kT )
sT 引入一个新的复变量z,令 z e 或 s
则上式变为 F ( z )
k
1 ln z T
则f (k n) z n F ( z )
f (k n) z n F ( z )
收敛域不变
第6章 离散系统的Z域分析
(2)单边z变换 若 f (k )是双边序列,其单边z变换为 f (k ) (k ) F ( z) 则左移后 f (k n) (k ) z F ( z ) z
z
Im[z ]
4、右边序列(因果序列)的收敛域
k F ( z ) f ( k ) z 由根值法:如果 k 0
k f (k ) z k 1 则z变化存在(收敛) lim k
R x1
Re [z ]
即 z lim k f (k ) Rx1
k
可见右边序列的收敛域是半径为 Rx1 的圆外部分。
例5、求序列cos( k ) (k ) 的z变换 z k a (k ) z 1 j k 解: j k za ] (k ) cos( k ) (k ) [e e 2 1 z z z ( z cos ) [ ] 2 z e j z e j z 2 2 z cos 1
当上式的公比 q z 1 1 ,即( z 1)时,级数收敛。根据等比
1 z 级数求和公式,得 Z [ (n)] 1 1 z z 1 z 即 ( n ) z 1 z 1 z 1
n 0
第6章 离散系统的Z域分析
例3、求指数序列 a k (k )的z变换 解: Z[ak (k )]
f (k ) z k收敛的z取值范围,
ak 1 , ①比值判断法:若有级数通项 ak ,而 lim k ak k 当 1时,级数收敛, 1不定。 1 时,级数发散,
②根值判断法: lim k ak ,当 1时,级数收敛,
k
n n n
k 0 n
n 1
f (k ) z k
1
收敛域不变
右移后 f (k n) (k ) z F ( z ) z
f (k )
k n
f (k ) z k
k
1 2 3 4 5 6 7 z0 z z z z z z z
第6章 离散系统的Z域分析
则左移后 f (k n) (k ) z F ( z ) z
二、z变换的收敛域
z变换是z的幂级数数, F ( z ) z变换存在的充分条件是
k
f (k ) z k
k
f (k ) z k
绝对可和
第6章 离散系统的Z域分析
1、z变换的收敛域:使 F ( z )
称为收敛域。 2、判别级数收敛的两种方法
k
收敛域不变
第6章 离散系统的Z域分析
4、z域积分(序列除k+m)
若f (k ) F ( z )
F f k m z d m 1 z k m m k 0, m Z
收敛域不变
m 0, k 0
F f k d z k
第6章 离散系统的Z域分析
3、z域微分(序列线性加权)
若f (k ) F ( z ) d m d m k f (k ) ( z ) F ( z ) kf (k ) z F ( z ) dz dz 例7、求斜边序列 k (k ) 的z变换 z z 1 解: (k ) z 1 d z z ] Z[k (k )] z [ dz z 1 ( z 1)2 z 1 d d z Z[k 2 (k )] z [ z [ ]] dz dz z 1
1
z
1
z
1
k 1
的Z变换。
a k k a k 1 k 1 a 1a k k 1
z a k za 1 z a k k 1 z a a k 1 a a
第6章 离散系统的Z域分析
第6章
本章要点
离散系统的Z域分析
6.1 6.2 6.3 6.4
Z变换 Z变换的性质 逆Z变换 Z域分析
第6章 离散系统的Z域分析
6.0
引言
与连续系统类似,离散系统也可用变换域法进
行分析。 Z变换 差分方程 代数方程
第6章 离散系统的Z域分析
6.1
一 Z变换的定义
f (t )
n n
n
k 0 n
n 1
f (k ) z k
1
右移后 f (k n) (k ) z F ( z ) z
若f (k )是因果序列, f (k ) f (k ) (k )
f (k-n) (k n) z n F ( z)
f (k n) (k n) z n F ( z ) z n f (k ) z k
Z变换
由抽样信号的拉氏变换引出z变换定义。
T ( t )
(1)
k
(t kT )
×
0
t
0 T 2T
t
f s (t )
fs( t ) f ( t ) T ( t )
0
t
k
f (t )(t kT )
第6章 离散系统的Z域分析
fs( t ) f ( t ) T ( t )
f (k ) z k ,记作 Z [ f (k )]
上式称为序列 f (k )的双边z变换。 若 f (k )为因果序列,则 F ( z ) f (k ) z k,称 F ( z ) 为序列 f (k ) 的单边z变换。
k 0
此后不特别说明,所指z变换为单边z变换。
第6章 离散系统的Z域分析
解: Z [k (k )]
k
z ( z 1) 2
z a
z 1
az ka (k ) 2 z ( z a ) 2 ( 1) a
z a
第6章 离散系统的Z域分析
6、k域反转
若f (k ) F ( z ) f ( k ) F ( z )
例10:求 a 解: k
k
F [ f (k n)] F [ g (k )]
k
g (k ) z
k
k
f ( k n) z k
(
f (1 n) z1 f (0 n) z 0 f (1 n) z 1
f (1 n) z1n f (n) z n f (1 n) z 1n )zn
n 1 k 0
k n
f (k ) z k
f (k 1) (k 1) zF ( z ) zf (0)
f (k 2) (k 2) z 2 F ( z ) z 2 f (0) zf (1)
例6、求序列 f (k ) (k ) (k 4) 的z变换 z 1 1 1 (k 4) 3 解: (k ) f (k ) (z 3 ) z 1 z ( z 1) z 1 z z 1 z 1 z 0
a k k k a z ( ) k 0 k 0 z
a 1即 z a,有 z 1 z k Z [a (k )] a za 1 z z 即a k (k ) 收敛域 za
z a
第6章 离散系统的Z域分析