ams振动分析实例中文版
振动分析中常用的计算公式
振动台在使用中经常运用的公式1、 求推力(F )的公式F=(m 0+m 1+m 2+ ……)A …………………………公式(1) 式中:F —推力(激振力)(N )m 0—振动台运动部分有效质量(kg ) m 1—辅助台面质量(kg )m 2—试件(包括夹具、安装螺钉)质量(kg )A — 试验加速度(m/s 2)2、 加速度(A )、速度(V )、位移(D )三个振动参数的互换运算公式 2.1 A=ωv ……………………………………………………公式(2) 式中:A —试验加速度(m/s 2)V —试验速度(m/s ) ω=2πf (角速度) 其中f 为试验频率(Hz )2.2 V=ωD ×10-3………………………………………………公式(3) 式中:V 和ω与“2.1”中同义D —位移(mm 0-p )单峰值2.3 A=ω2D ×10-3 ………………………………………………公式(4) 式中:A 、D 和ω与“2.1”,“2.2”中同义 公式(4)亦可简化为:A=D f ⨯2502式中:A 和D 与“2.3”中同义,但A 的单位为g1g=9.8m/s 2所以: A ≈D f ⨯252,这时A 的单位为m/s 2 定振级扫频试验平滑交越点频率的计算公式 3.1 加速度与速度平滑交越点频率的计算公式f A-V =VA28.6 ………………………………………公式(5)式中:f A-V —加速度与速度平滑交越点频率(Hz )(A 和V 与前面同义)。
3.2 速度与位移平滑交越点频率的计算公式DV f DV 28.6103⨯=- …………………………………公式(6) 式中:D V f -—加速度与速度平滑交越点频率(Hz )(V 和D 与前面同义)。
3.3 加速度与位移平滑交越点频率的计算公式f A-D =DA ⨯⨯23)2(10π ……………………………………公式(7) 式中:f A-D — 加速度与位移平滑交越点频率(Hz ),(A 和D 与前面同义)。
AMS Machinery Manager 5.71版快速入门指南说明书
快速入门指南MHM-97498-ZH, Rev 32018 年6 月AMS Machinery Manager 5.71 版版权© 2018 Emerson。
保留所有权利。
如未获得Emerson 的书面许可,不得以任何形式复制、传播、改编本出版物的任何部分、将其存储到检索系统或翻译成任何语言。
免责声明本手册仅用于提供信息。
EMERSON 对于本材料不做任何类型的保证,包括但不限于对适销性和特定目的适用性的暗示保证。
Emerson 对于此处可能包含的任何错误、疏漏或不一致或者与本材料的供应、性能或使用有关的偶然或必然损失不承担任何责任。
本文档中包含的信息可能会有变更,恕不另行通知;这种变更不构成Emerson 的任何承诺。
本手册中包含的信息并非面面俱到,不可能包含所有特殊情况。
商标和服务标志请参阅/documents/automation/40816.pdf.所有其他标志均属于其各自所有者的资产。
专利本手册中描述的产品受到现有或申请中的专利保护。
内容入门指南 (4)您的计算机硬件 (6)安装和注册AMS Machinery Manager .......... 10 启动AMS Machinery Manager.. (12)后续步骤 (13)网络版安装概述 (14)1 入门指南感谢您选择AMS Machinery Manager。
本指南提供了使用单机版的基础知识。
第14页提供了网络版安装概述。
安装网络版前,请参阅手册DVD 上的《安装手册》,了解重要说明。
让我们开始吧!您的AMS Machinery Manager 包装中包括:□快速入门指南□软件安装DVD□手册DVD定制安装介质根据您的订单,软件安装DVD 包含以下内容:• 单机版(单用户)或网络版安装•AMS Machinery Manager 技术• 许可用户数量如需添加技术或更多许可用户,请联系Emerson 的销售代表。
寻求帮助AMS Machinery Manager启动 AMS Machinery Manager,然后从主菜单选择Help(帮助)。
振动分析案例(48个实例)
实例No.7某油气田平台中甲板压缩机平台振动故障诊断
实例No.8某循环气压缩机管道振动和噪声故障
实例No.9某原油泵进口管道共振故障的诊断和排除
实例No.10某立式泵严重共振引起叶轮轴疲劳断裂故障的诊断
实例No.11某往复式空压机的出口管道共振故障的诊断
实例No.12某锅炉给水泵的流体动力振动故障的诊断
1996年11月2日某大型裂解气压缩机中压缸两端轴承座振动突 增数倍,诊断为转子严重不平衡!开缸检查证实,因进口过滤 器支承块断裂,刮下大量积精品焦课件,堆积在转子上造成严重不11 平 衡!经清焦处理,开车证实:振动恢复正常。
Case History #2 Rotor Unbalance
实例NO.2 30万吨/年乙烯装置裂解 气压缩机组转子动不平衡故障
Typical Spectrum典型的频谱
严重不平衡的典型频谱
Typical spectrum shows dominant GMF典型频谱表明转 子转速频率突增,这是精典品课型件 的转子不平衡的特征12!
实例No.41一次风机电动机转子与定子之间气隙变化故障的诊断
实例No.42某离心式冷水机(约克)电动机定子偏心或定子绝缘层短路故障诊断
实例No.43某干燥机排风机电动机转子条松动故障的诊断
实例No.44某变速交流感应电动机转子条松动故障的诊断
实例No.45某离心式冷水机(约克)电动机相位故障的诊断
实例No.46某电厂大型引风机电动机多根转子条断裂故障的诊断
实例No.19某驱动箱伞齿轮高噪声和振动故障的诊断
实例No.20某电动机转子条故障
实例No.21某纸机滚动轴承外环故障
实例No.22某纸机滚动轴承外环故障
实例No.23某纸机滚动轴承内环故障
SAMCEF有限元 振动噪声分析实例
第16章振动噪声分析实例16.1.容器声学响应分析16.1.1 概述本例研究了一个在外部声场影响下,结构tank与acoustic cavity(声腔)之间的作用关系。
分析过程包含以下几个方面:(1)首先,我们需要分析tank与acoustic cavity耦合后的物理性能;这里主要是考核tank与acoustic cavity耦合的模态特征。
(2)第二个步骤,我们需要的考察耦合对结构的影响程度。
比如,acoustic cavity在频率响应计算中对tank的影响:没有acoustic cavity的结构与有acoustic cavity的tank,频率响应的峰值将出现在不同的频率。
这些在前面的算例中我们已经详细的介绍过。
(3)第三步我们将水注入tank作为激励,研究在周期性激励下tank与acoustic cavity耦合的频率响应。
(4)第四步我们将研究tank外部加声场响应的传播规律。
16.1.2启动在此步骤中我们对tank与acoustic cavity耦合下的振动特性进行分析,为频率响应做基础。
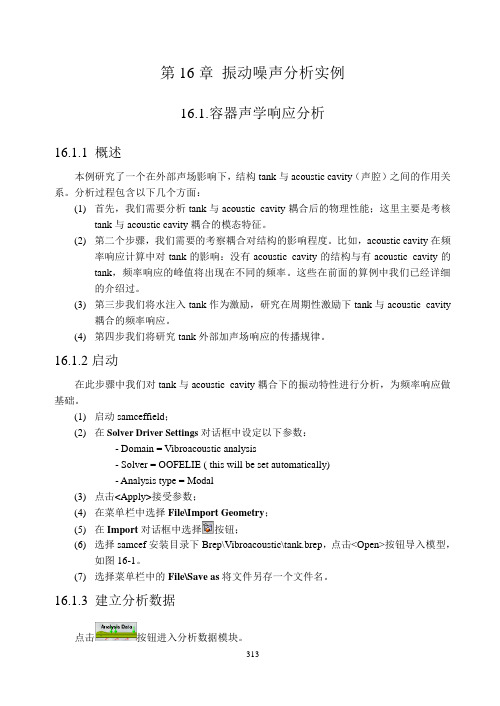
(1)启动samceffield;(2)在Solver Driver Settings对话框中设定以下参数:- Domain = Vibroacoustic analysis- Solver = OOFELIE ( this will be set automatically)- Analysis type = Modal(3)点击<Apply>接受参数;(4)在菜单栏中选择File\Import Geometry;(5)在Import对话框中选择按钮;(6)选择samcef安装目录下Brep\Vibroacoustic\tank.brep,点击<Open>按钮导入模型,如图16-1。
(7)选择菜单栏中的File\Save as将文件另存一个文件名。
16.1.3 建立分析数据点击按钮进入分析数据模块。
工厂振动测试实验报告(3篇)
第1篇一、引言随着工业自动化程度的不断提高,工厂生产过程中产生的振动问题日益受到重视。
振动不仅会影响设备的正常运行,还会对操作人员的安全和健康造成威胁。
为了确保工厂生产的安全和高效,本报告对工厂振动进行了系统测试,以了解振动源、振动传播路径以及振动对设备的影响,为振动控制提供科学依据。
二、实验目的1. 了解工厂振动产生的来源及传播路径。
2. 测量不同区域的振动强度和频率。
3. 分析振动对设备的影响。
4. 为振动控制提供科学依据。
三、实验设备与仪器1. 振动测试仪:用于测量振动强度和频率。
2. 激光测距仪:用于测量设备与振动源的距离。
3. 摄像头:用于观察振动现象。
4. 计算机软件:用于数据处理和分析。
四、实验方法1. 确定测试点:根据工厂布局,选取具有代表性的测试点,包括振动源附近、振动传播路径上以及设备附近。
2. 测试振动强度和频率:使用振动测试仪分别测量各个测试点的振动强度和频率。
3. 测量设备与振动源的距离:使用激光测距仪测量设备与振动源的距离。
4. 观察振动现象:使用摄像头观察振动现象,记录振动形态和频率。
5. 数据处理和分析:将测试数据输入计算机软件,进行数据处理和分析。
五、实验结果与分析1. 振动源:通过测试发现,工厂振动的主要来源为机械设备运行、物料运输以及空气流动等。
2. 振动传播路径:振动主要沿地面、墙壁以及设备本身传播。
3. 振动强度和频率:不同区域的振动强度和频率存在差异,振动源附近振动强度较大,频率较高;振动传播路径上振动强度逐渐减弱,频率降低;设备附近振动强度较小,频率较低。
4. 振动对设备的影响:振动可能导致设备疲劳、磨损,甚至损坏。
长期处于高振动环境下,设备的使用寿命将大大缩短。
六、振动控制措施1. 优化设备布局:将振动源与设备保持一定距离,减少振动传播。
2. 使用减振设备:在振动源附近安装减振垫、减振器等,降低振动强度。
3. 改善物料运输方式:采用低速、平稳的运输方式,减少物料运输过程中的振动。
振动大实例与原因分析PDF
1倍频振动大除了动平衡还应检查什么750KW异步电机3000V工频2极轴长2M6轴瓦档轴颈80mm端盖式滑动轴承中心高500mm。
检修后空载试车垂直4.6mm/s水平6.5mm/s轴向1.2mm/s振动较大振感很强。
振动频谱1倍频4-5mm/s2倍频1-2mm/s断电后1倍频2倍频值一点点降下来的。
据维修技师反应3年前空载试车也是振动大到现场连上机械接手在转就好了于是到现场安装试车结果振动还是大。
重新拆回车间转子在动平衡机上做了动平衡装配时轴瓦间隙也重新复测了。
再试车振动比原来还大了点频谱和原来一样。
我问了维修人员动平衡配重2面都加了轴瓦间隙都在标准里面。
请问做动平衡时是在1300-1500左右做的有无可能在3000转时平衡改变了除了动平衡还要检查其他什么可能是共振问题这个规格的电机转子固有频率接近5ohz 本案例中应大于50hz 动平衡后单机试转仍大是由于加重后固有频率下降更接近转频所以振动有升无减请注意动平衡的速度不是工频平衡本身可能是合格的联合运行振动值更大是由于连接上了被驱动设备形成转子副电机转子带载后固有频率下降较多更接近工频。
所以振动愈发的大其实就一句话组合转子的固有频率小于原来单体的好像这么说的原话不记得了据统计有19的设备振动来自动不平衡即一倍频而产生动不平衡有很多原因。
现场测量的许多频谱结果也多与机器的一倍频有关系下面仅就一倍频振动增大的原因进行分析。
一、单一一倍频信号转子不平衡振动的时域波形为正弦波频率为转子工作频率径向振动大。
频谱图中基频有稳定的高峰谐波能量集中于基频其他倍频振幅较小。
当振动频率小于固有频率时基频振幅随转速增大而增大当振动频率大于固有频率时转速增加振幅趋于一个较小的稳定值当振动频率接近固有频率时机器发生共振振幅具有最大峰值。
由于通常轴承水平方向的刚度小振动幅值较大使轴心轨迹成为椭圆形。
振动强烈程度对工作转速的变化很敏感。
1力不平衡频谱特征为振动波形接近正弦波轴心轨迹近似圆形振动以径向为主一般水平方向幅值大于垂直方向振幅与转速平方成正比振动频率为一倍频相位稳定两个轴承处相位接近同一轴承水平方向和垂直方向的相位差接近90度。
振动分析案例(48个实例)

实例No.3 某汽轮机叶片断裂故障
转子不平衡 !
上海石化自备电厂5#汽轮机轴承座振动速度突增至5. 25毫米/ 秒, 有效值,而6#机仅为0. 466毫米/秒,有效值;振动速度频谱均为 一倍转速频率50赫兹。诊断为转子不平衡,据历史经验,汽轮 14 机叶片又断了!停机检查证实的确断了五片转子叶片!
故 障 诊 断 实 例 分 析 之 四
某透平膨胀机叶片断裂故障
(转子不平衡和流体动力激振故障)
罗克韦尔自动化(厦门 )有限公司 大连分公司
15
实例No.4某透平膨胀机叶轮叶片断裂故障
1989年1月27 日某透平膨胀 机振动和噪声 突增。频谱显 示1RPM和 8RPM频率 分量最大分别 达5.91和4.68 毫米/秒,有 效值,比正常 机分别大18和 25倍。诊断为 转子不平衡, 并且已断一片 叶片(出口导 叶为8片叶片, 即静子叶片通 过频率为 8 RPM)。
断了一片叶片!
19 离心叶轮14片转子叶片已断一片叶片的透平膨胀机叶轮照片
故 障 诊 断 实 例 分 析 之 五
某锅炉风机 地脚螺栓松动故障
罗克韦尔自动化(厦门 )有限公司 大连分公司
20
实例No.5某锅炉风机基础地脚螺栓松动故障
松动
3#和4#测点处地脚螺栓松动
21
故 障 诊 断 实 例 分 析 之 六
某大型风机 轴承座松动故障
罗克韦尔自动化(厦门 )有限公司 大连分公司
22
实例No.6
5#风机轴承座松动故障
3#轴承座振动3H,3V,3A
1#轴承座振动1H,1V,1A 2#轴承座振动2H,2V,2A
4#轴承座振动4H,4V,4A
汽轮机
轴流式风机
某型航空发动机中介机匣振动分析
功率 控 制 泵 将 油通 过 A线 压 人 缸 体 使功 参 考文 献 通 过 调 节压 缩 机 内部 带 有液 压 活 塞 率降低 。缸体 另一侧 的油 被送到压 缩机人 [ 1 】 贾洪义 . 冰 机 系统存 在 问题 分 析 及 节 的滑阀来 控制螺 杆压缩 机 的功率 。通 过活 口。 相 反 地 , 当打 开 S O L . B的 电源 ,功 能 改造方 向 Ⅱ 】 . 大氮肥 ,2 0 1 0( 0 6 ) . 塞 上下游 的油 的压差控 制液压 活塞 ,通过 率控 制 泵 将 油 通 过 B线压 入 缸 体 使 功率 【 2 】 曾延 英 . 冰 机 系统 运 行 工 况测 试 与 能
除首要 在 工作 转 速状 态下 平衡 转子 , 还 有 通 过拉 紧松 动 的 螺栓 来 减 小 转 子体 弹 性 , 由于 发 动 机 结 构 特 点 ,无 法 在试 车 时 进 行螺 栓 拧 紧工 作 。 由于 该 大 修 发 动 机 需 要进 行 工 厂 试 车 和 检 验试 车 ,试 车 后 对 经过 高速 运 转 的 高 压压 气 机 转 子 剩 余 平 衡 量稳 定 基 础 上 调 整 ,然 后 再 检 验 试车 , 发 动机排 振结 果证 明 了此观 点。 2弹性 支 承 及 转 子 剩 余 平 衡 量 之 间
的关系
轴 颈 中心 将 南大轨道 突 然下跳 到小 轨遣
按 照 挤 压油 膜 的工 作 原 理是 阻尼 越 大, 振 动幅值 越小 。 适 当提高 阻尼系 数 , 可 降低 发动 机振 动 幅值 。N . M a g g e 认 为对 转 子 的不 平 衡 响应 特 别 是 像 叶 片 飞失 那 样 的大 突 加 不 平 衡量 的 响应 ,要 得 到满 意 结果 ,必须 优化 S F D 的下 列参 数 ,即 : 工 质 的轴 向流 速 与 周 向流 速 之 比 ,弹支 发动 机 ,1 9 9 6( O 8 ). 刚度 , 阻尼 器长度 , 径 向间隙 , 油槽 尺寸 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a m s振动分析实例中文
版
公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]
1.问题描述
研究太阳能板展开前和卫星或火箭分离前卫星的运行。
研究其发射振动环境及其对卫星各部件的影响。
2.待解决的问题
在发射过程中,运载火箭给敏感部分航天器部件以高载荷。
每个航天器部件和子系统必学设计成能够承受这些高载荷。
这就会带来附加的质量,花费高、降低整体性能。
更好的选择是设计运载火箭适配器(launch vehicle adapter)结构。
这部分,将设计一个(launch vehicle adapter)的隔离mount,以在有效频率范围降低发射震动传到敏感部件的部分。
关心的敏感部件在太阳能板上,对70-100HZ的输入很敏感,尤其是垂直于板方向的。
三个bushings将launch vehicle adapter和火箭连接起来。
Bushing的刚度和阻尼影响70-100HZ范围传递的震动载荷。
所以设计问题如下:
找到运载火箭适配器系统理想刚度和阻尼从而达到以下目的:
传到航天器的垂直加速度不被放大;
70-100HZ传递的水平加速度最小。
3.将要学习的
Step1——build:在adams中已存在的模型上添加输入通道和振动执行器来时系统振动,添加输出通道测量响应。
Step2——test:定义输入范围并运行一个振动分析来获得自由和强迫振动响应。
Step3——review:对自由振动观察模态振型和瞬态响应,对强迫振动,观察整体响应动画,传递函数。
Step4——improve:在横向添加力并检查传递加速度,改变bushing的刚度阻尼并将结果作比较。
添加频域测量供后续设计研究和优化使用。
需创建的东西:振动执行器、输入通道、输出通道
完全非线性模型
打开模型在install dir/vibration/examples/tutorial satellite 文件夹下可将其复制到工作木录。
加载Adams/vibration模块:Tools/ plugin Manager.
仿真卫星模型:仿真看其是否工作正常,仿真之前关掉重力,这个仿真太阳能板在太空中的位置。
关掉重力:Settings—— Gravity ;
仿真:tool面板——simulation ,设置仿真时间是15s,步长为500;点击
,将停在仿真后mode
返回最初的模型状态:点击,把重力打开,这时模型回到振动分析准确的发射
状态。
创建输入通道:payload adapter中心创建两个输入通道(全局x和y方向)并为其创建振动执行器。
输入通道给系统提供通道,可以用来:plot频率响应,使用振动执
行器(加载力、位移、速度、加速度)驱动系统。
当以PSD形式输入时一个典型的设计可能需要输入加速度水平是
g2/Hz,我们将采用一个等效力normalized to a value of 1的输
入,因为我们只对不同频率的相对加速度感兴趣。
2个振动执行器,输入正弦波,相互垂直x和y方向。
第三个振动执行器将添加一个y方向1g的垂直加速度。
最后检查振
动执行器。
创建输入通道和振动执行器:
vibration—build—input channel
创建输出通道:输出端口
Vibration—— Build—— Output Channel—— New.
4.测试模型
创建运行振动分析
强迫振动给模型设置振动参考配置,当你创建振动分析时,Adams制定输入和输出位置。
这些位置在运行振动时被使用。
在强迫振动分析前自动进行自由振动分析。
5.评估模型
采用Adams/postprocessor研究分析得到的数据
5.1查看表格结果
Vibration——review——display eigenvalue table
若有不稳定的值会高亮显示,表中都是稳定的。
5.2To view the table of modal coordinates:
Vibration—— Review——Display Modal Info Table.
激励下的modal coordinates
显示16阶模态被该频率下y方向的力激发的震动大小。