ADAMS分析实例(两个定轴齿轮)
ADAMS分析实例(两个定轴齿轮)
ADAMS 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知 20,4,25,5021====αmm m z z ,两个齿轮的厚度都是50mm 。
⒈ 启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框⒉ 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2 用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮3.1 在ADAMS/View 零件库中选择圆柱体(Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm (10025042z m 1=⨯=⨯) 。
如图3-1所示。
图 2-1 设置工作网格对话框图3-1设置圆柱体选项3.2 在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
adams齿轮副画法
Adams齿轮副画法
该次使用的是adams2007r3版的。
1.打开软件
点击ok,进入。
我们这次的模型使用200mm和100mm的齿轮。
2.做出齿轮。
2.1我们先画出两个分别为200mm和100mm。
宽度都为50mm的
圆柱。
如图:
把两个圆柱放正。
点击如图2.1。
然后点击两个圆柱,点一下出现箭头,使箭头指向右如图2.2.
变成图2.3,然后再使用使两个圆柱相切如图2.4
3.做出转动副。
3.1点击然后construction选择接下去先点圆柱再点地面再点中心点。
结果如图3.1
4.做出marker。
4.1点击,选择然后按住ctrl点击相切点
如图4.1(白圈里面的)。
复杂的可以先点下窗口再按F4.出现图4.2.这样方便点击。
4.2调整marker的xyz轴。
左击那个蓝色正方形的z,拖动变成图4.3.这个不好弄。
5加齿轮副
点击出现图5.1。
看你那两个转动副是joint几就选几。
Marker也一样结果图5.2.然后ok。
然后加扭矩或者角速度就行了。
基于ADAMS的往复式活塞压缩机的建模与仿真

基于ADAMS的往复式活塞压缩机的建模与仿真第1章基于ADAMS的往复式活塞压缩机的建模与仿真本章以往复式活塞压缩机的运动为例,介绍在ADAMS环境中进行模型建模和约束的添加,以及对建立好的模型进行仿真分析。
1.1模型分析该模型由气缸、活塞、连杆、中心动力轴架和齿轮组成,如图1-1所示。
图1-1往复活塞式压缩机模型1.2启动ADAMS并设置工作环境1.2.1启动ADAMS双击桌面上ADAMS/View的快捷图标,打开ADAMS/View。
在欢迎对话框中选择“Create a new model”,在模型名称(Model name)栏中输入:compressor。
在重力名称(Gravity)栏中选择(Earth Normal (-Global Y);在单位名称(Units)栏中选择“MMKS-mm,kg,N,s,deg”。
如图1-2所示。
设置完毕后单击OK按钮,进入ADAMS主页面。
图1-2创建新模型1.2.2设置工作环境(1)对于这个模型,网格间距需要设置的合适以满足要求。
在ADAMS/View菜单栏中,选择设置(Setting)下拉菜单中的工作网格(Working Grid)命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X和Y分别设置成400mm和400mm,间距(Spacing)中的X和Y都设置成5mm,然后点击OK确定,如图1-3所示。
图1-3设置工作网格对话框图1-4坐标窗口(2)用鼠标左键点击选择(Select)图标,控制面板出现在工具箱中。
用鼠标左键点击动态放大(Dynamic Zoom)图标,在模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
按键盘上的F4键打开坐标窗口Coordinate Window,如图1-4所示。
1.3齿轮模型的创建及仿真1.3.1创建齿轮模型(1)在主工具箱中右击几何建模按钮(默认的是连杆工具)展开所有的几何建模工具(Rigid Box)。
基于ADAMS的齿轮齿条刚柔耦合啮合分析

应当注意, 其中各参数定义在国标中已有详细说明, 不再赘述。 因为有限元仿真的齿轮齿条均为静止状态, 故动载系数 KV 取 1。
3 ADAMS 刚体动力学分析
利用 SimDesigner 将 CATIA 模型转换到 ADAMS 中 。 在 ADAMS 中添加相应运动副, 定义齿轮和齿条的碰撞接触。 碰撞力 非线性指数、 阻尼系数、 最大阻尼时 仿真的重点是确定接触刚度、 的击穿深度、 接触面静态及动态摩擦系数等参数。其中接触刚度 和零件的材料及零件的形状有关。 ADAMS 中基于 Impact 函数的 碰撞力是用刚度系数和阻尼系数来计算碰撞力。根据 Hertz 碰撞 9P 理论, 考虑接触面积为圆形时有: δ= a = *2 R 16RE 由此式可得撞击时接触法向力 P 和变形 δ 关系为:
姨
(1 ) (2 )
4 ADAMS 柔性体动力学分析
在有限元软件中分别在齿轮和齿条中心位置设置一个连接 点, 并采用多节点约束 (MPC ) 将其与有限元模型相连接。计算齿 输出模态中性文件。 将模态中性文件导入 轮和齿条前 16 阶模态, ADAMS 中并做检查, 其中前 6 阶模态为刚体模态, 认定为无效模 态。 类似于刚体模型, 在柔性体齿轮齿条上添加相应约束、 负载和 建立柔性体碰撞模型。将分析 运动副, 齿条输入速度为 20mm/s, 结果与同样速度下的刚体模型进行对比, 如表 3 所示。 表 3 刚、 柔模型啮合力对比
Meshing Analysis of Rigid-flexible Coupled Model for Rack and Pinion Based on ADAMS
直齿轮adams接触(碰撞)仿真分析

直齿轮adams接触(碰撞)仿真分析本⼈亲做斜齿轮参数为:算得其中⼼距:153.37 传动⽐:i=3根据三相啮合⼒的计算公式算得斜齿轮受⼒为:15650.365823.523326.59t r a F N F N F N=== 齿轮参数化建模:齿轮轮齿的⽣成主要有两种:⼀,直接⽣成轮齿;⼆,切除齿槽形成轮齿。
斜齿轮的⽣成过程中,重点是渐开线和螺旋线的⽣成环节。
⾸先要确定渐开线⽅程,确保每个尺⼨都是通过参数约束的。
其次要确定螺旋线⽅程。
最后通过扫描混合(或者可变截⾯扫描)、镜像、阵列等命令创建出渐开线斜圆柱齿轮。
创建斜齿轮的参数关系:Alpha_t=atan(tan(Alpha_n)/cos(Beta)) Ha=(Ha_n+X_N)*M_NHf=(Ha_n+C_N-X_N)*M_N D=Z*M_N/cos(Beta) Db=D*cos(Alpha_t) Da=D+2*Ha Df=D-2*Hf采⽤的渐开线⽅程式:Rb=Db/2 theta=t*45x= Rb*cos(theta)+Rb*sin(theta)*theta*pi/180 y=0z= Rb*sin(theta)-Rb*cos(theta)*theta*pi/180采⽤的螺旋线⽅程式:x=D*cos(t*360*B*tan(beta)/(PI*D))/2 y=B*tz=Ds*D*sin(t*360*B*tan(beta)/(PI*D))/2上述关系式中D 是分度圆直径,DB 是基圆直径,Da 是顶圆直径,Df 是齿根圆直径,DS 表⽰斜齿轮的旋向(左旋为1,右旋为-1)。
其中螺旋线⽅程中B*tan(beta)/(PI*D)表⽰螺旋线转过的圈数。
三维模型建⽴⽤上述参数利⽤proe 建⽴齿轮三维模型并装配好,如图1,、图2所⽰图1图2将三维模型导⼊adams定义导⼊模型后,逐步进⾏:材料属性定义,添加约束,添加驱动,添加负载,添加接触⼒,然后得到仿真处理前期⼯作,如图3,图4所⽰图3图4、仿真后处理仿真后处理得到斜齿轮三个⽅向上波动图和均值。
基于ADAMS的齿轮传动特性仿真分析.kdh
【148】 第33卷 第12期2011-12(上)收稿日期:2011-09-12作者简介:连锦程(1984 -),男,陕西榆林人,研究生,研究方向为电动汽车行星齿轮传动。
基于ADAMS的齿轮传动特性仿真分析Based on ADAMS of gear transmission characteristic simulation analysis连锦程,崔建昆LIAN Jin-cheng, CUI Jian-kun(上海理工大学 机械工程学院,上海 200093)摘 要:文章基于ADAMS对齿轮传动特性进行了仿真分析,获得设计齿轮在真实工作条件下的啮合性能,从而形成齿面加工参数设计的闭环修正系统。
关键词:ADAMS;齿轮传动;仿真分析中图分类号:TH132 文献标识码:B 文章编号:1009-0134(2011)12(上)-0148-03Doi: 10.3969/j.issn.1009-0134.2011.12(上).440 引言在齿轮产品试制之前,对齿轮空载和承载情况下的啮合过程进行计算机仿真,以获得设计齿轮在真实工作条件下的啮合性能,形成齿面加工参数设计的闭环修正系统,对于缩短研发周期、减少研究失误、节省试制费用和提高设计质量有着很重要的意义。
ADAMS 是集成建模、求解和可视化技术一体的运动仿真软件,是当今世界上应用范围最广的机械系统动力学仿真分析平台之一。
它已成功应用于汽车工程、航空航天、铁路车辆、工程机械和工业机械等领域。
本文以齿轮泵为模型,进行了分析。
1 泵齿轮副传动特性分析物理建模是在几何模型的基础上,对齿轮泵齿轮副系统的各个零件添加物理属性,包括:确定组成系统部件的材料密度、泊松比和弹性模量;设置所有部件的质量和惯性矩;确定装配部件间的约束关系和设置相应的主轴驱动参数;作用在齿轮副系统的各种外力和机构部件间的摩擦力等[1]。
通过建立模型得到同真实齿轮泵齿轮副在几何形状和物理性能等方面都完全一致的虚拟样机[2]。
adams齿轮反转法设计案例

adams齿轮反转法设计案例
Adams齿轮反转法是一种机械设计方法,主要用于驱动两个轴之间的相对运动。
这种方法可以实现往复运动,但不是连续的旋转运动。
通过将圆周运动转化为往复运动,Adams齿轮反转法可以使机械系统更加简化,设计更加灵活。
下面是一个Adams齿轮反转法的设计案例:
设计需求:
设计一个可以将旋转运动转化为往复运动的机械系统。
设计方案:
将一个带有斜齿的齿轮与一个普通齿轮相连,这两个齿轮的齿数比例为3:2。
斜齿齿轮的斜向齿和普通齿轮的齿咬合处固定一个连杆,将连杆与一个曲轴相连。
当曲轴进行旋转运动时,齿轮和连杆将会产生往复运动。
设计特点:
这种设计方案可以实现旋转运动到往复运动的转换,适用于需要往复运动的机械系统。
并且通过改变齿轮的齿数比例和斜齿的角度,可以实现不同幅度的往复运动。
然而,这种设计方案也存在摩擦和磨损问题,需要注意维护和保养。
基于ADAMS的齿轮变速箱动态特性仿真分析

参考文献: [1] 张金菊.结构用锯材非破坏性检测综合分等技术研究 Combigrade
课题第二阶段试验[D].北京:北京林业大学,2007. [2] 盛骤,等.概率论与数理统计[M].北京:高等教育出版社,2008. [3] 王朝志,张厚江.应力波用于木材和活立木无损检测的研究进展
[J].林业机械与木工设备,2006,34(3).
有进行其它缺陷的检量,即外观分等没有考虑其它缺陷
3 结束语
因素的影响,今后对此应做进一步的研究。
从本次试验的结果看,应力波检测所得的数据与各 国外观分等结果的相互印证性为:美国的较好,中国和 日本的不好。这表明采用应力波检测法对按美国外观分 等标准分等的试件所含节子的检测比较准确,同时也表 明,美国外观分等方法与中国和日本的外观分等方法相 比能更准确地检测试件的密度。中国和日本外观分等结
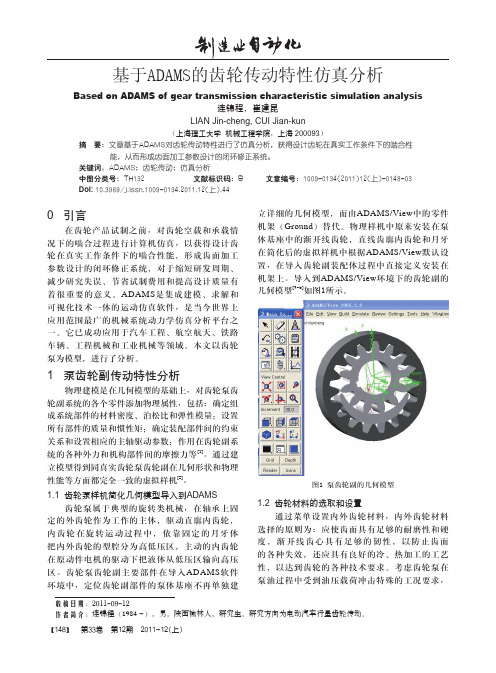
角速度 /°·s-1
9000.0 8000.0
z1.CM_Angular_Velocity.Y
tygear
7000.0
6000.0
5000.0
4000.0
3000.0
2000.0
1000.0
0.0 0.0 0.05 0.1 0.15 0.2 0.25 0.3
基于虚拟样机模型,在输入轴上添加转速驱动,为了 在仿真过程中转速不出现突变,利用 STEP 函数使转速在 0.2s 内由 0 增加到 1400r/min(8400°/s),关系式为 STEP (time,0,0D,0.2,8400D),如图 3a 所示。输出轴上添加 一个恒定负载转矩 6×106N·mm (该转矩由实际工况决 定),方向与转速驱动方向相反,添加好约束和载荷的
2 建立齿轮变速箱仿真模型
2.1 建立三维实体模型
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADAMS 分析实例-定轴轮系和行星轮系传动模拟
有一对外啮合渐开线直齿圆柱体齿轮传动.已知 20,4,25,5021====αmm m z z ,两个齿轮的
厚度都是50mm 。
⒈ 启动ADAMS
双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,
在模型名称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框
⒉ 设置工作环境
2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2 用鼠标左键点击选择(Select )图标,控制面板出现在工
具箱中。
2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮
3.1 在ADAMS/View 零件库中选择圆柱体
(Cylinder )图标
,参数选择为“New
Part ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm (1002
5042z m 1=⨯=⨯) 。
如图3-1所示。
图 2-1 设置工作网格对话框
图3-1设置圆柱体选项
3.2 在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
则一个圆柱体(PART_2)创建出来。
如图3-2所示。
图3-2 创建圆柱体(齿轮)
3.3 在ADAMS/View 中位置/方向库中选择位置旋转(Position: Rotate …)图标,在角度(Angle )
一栏中输入90,表示将对象旋转90度。
如图3-3所示。
在ADAMS/View 窗口中用鼠标左键选择圆柱体,将出来一个白 色箭头,移动光标,使白色箭头的位置和指向如图3-4所示。
然后点击鼠标左键,旋转后的圆柱体如图3-5所示。
3-3 位置旋转选项
图 3-4 圆柱体的位置旋转
图3-5 旋转90后的圆柱体
图3-6设置圆柱体选项
3.4 在ADAMS/View 零件库中选择圆柱体
(Cylinder )图标
,参数选择为“New Part ”,
长度(Length )选择50mm (齿轮的厚度),半径 (Radius )选择50mm (5022542z m 2=⨯=⨯),
如图3-6所示。
在ADAMS/View 工作窗口中先用 鼠标左键选择点(150,0,0)mm ,然后选择 点(150,50,0)。
则一个圆柱体(PART_3)
创建出来。
如图3-7所示。
3-7 创建圆柱体(齿轮)
3.5 在ADAMS/View中位置/方向库中选择位置旋转(Position: Rotate…)
图标,在角度(Angle)一栏中输入90,表示将
对象旋转90度。
如图3-3所示。
在ADAMS/View
窗口中用鼠标左键选择圆柱体,将出来一个白色箭头
,移动光标,使白色箭头的位置和指向如图3-8所示。
然后点击鼠标左键,旋转后的圆柱体如图3-9所示。
图3-8 圆柱体的位置旋转
图3-9 旋转90后的圆柱体
⒋创建旋转副、齿轮副、旋转驱动
4.1选择ADAMS/View约束库中的旋转副(Joint: Revolute)
图标,参数选择2 Bod-1 Loc和Normal To Grid。
在
ADAMS/View工作窗口中先用鼠标左键选择齿轮(PART_2),
然后选择机架(ground),接着选择齿轮上的PART_2.cm,
如图4-1所示。
图中显亮的部分就是所创建的旋转副(JOINT_1)
该旋转副连接机架和齿轮,使齿轮能相对机架旋转。
图
4-1 齿轮上的旋转副
4
4.2 再次选择ADAMS/View约束库中的旋转副(Joint:
Revolute)图标,参数选择2 Bod-1 Loc和Normal To
Grid。
在ADAMS/View工作窗口中先用鼠标左键选择齿轮
(PART_3),然后选择机架(ground),接着选择齿轮上的
PART_3.cm,如图4-2所示。
图中显亮的部分就是所创建的旋
转副(JOINT_2)该旋转副连接机架和齿轮,使齿轮能相对机架旋
转。
图4-2 蜗杆上的旋转副
4.3 创建完两个定轴齿轮上的旋转副后,还要创建两个
定轴齿轮的啮合点(MARKER)。
齿轮副的啮合点和旋转副必须有相同的参考连杆(机架),并且啮合点Z 轴的方向与齿轮的传动方向相同。
所以在本题中,啮合点(MARKER)必须定义在机架(ground)上,机架可以看作机架。
选择ADAMS/View工具箱的动态选择(Dynamic Pick)图标,将两个齿轮的啮合处进行放大,
再选择动态旋转图标,进行适当的旋转。
选择ADAMS/View零件库中的标记点工具图标,参数选择如图4-3所示。
选择坐标
为(100,50,0),如图4-4所示,
图中显亮的部分就是所创建的啮
合点(MARKER_14)。
图4-3 标记点的选项
图4-4 蜗轮蜗杆的啮合点
4.4 下面将对上面做出的啮合点进行位置移动和方位旋转,使该啮合点位
于两齿轮中心线上,并使啮合点的Z轴方向与齿轮旋转方向相同。
在
ADAMS/View窗口中,在两个齿轮啮合处点击鼠标右键,选择--Maker:
MARKER_14→Modify,如图4-5所示。
在弹出的对话框中,将Location
栏的值100.0, 50.0, 0.0改为100.0, 25, 0.0(位置移动),将Orientation栏中的值
0.0, 0.0, 0.0修改为0, 90, 0(方位旋转)。
如图4-6所示。
点击对话框下面的OK
键进行确定,旋转后的啮合点(MARKER_14)如图4-7所示。
从图中可以
看出,啮合点的Z轴(蓝色)Z轴的方向与齿轮的啮合方向相同。
图4-5 属性修改对话框
图4-7 旋转后的啮合点图4-6 进行坐标轴的旋转
4.5 选择ADAMS/View约束库中的齿轮副(Gear)图标,在弹出的对话框中的Joint Name栏中,
点击鼠标右键分别选择JOINT_1、JOINT_2。
如图4-7所示。
在Common Velocity Marker栏中,点击鼠标右键选择啮合点(MARKER_14)。
如图4-8
所示,然后点击对话框下面的OK按钮,两个
齿轮的齿轮副创建出来,如图4-9所示
4-7 齿轮副的创建对话框
图4-8 齿轮副的创建要素
图4-9 定轴齿轮的齿轮副
4.6在ADAMS/View驱动库中选择旋转驱动(Rotational Joint Motion)按钮,在Speed一栏中输入360,360表示旋转驱动每秒钟旋转360度。
在ADAMS/View工作窗口中,两个齿轮中任选一个作为主动齿轮,本设计中选择左边的齿轮(红色的),用鼠标左键点击齿轮上的旋转副(JOINT_1),一个旋转驱动创建出来,如图4-10所示,图中显亮的部分为旋转驱动。
图4-10 齿轮上的旋转驱动
5仿真模型
5.1 点击仿真按钮,设置仿真终止时间(End Time)为1,仿真工作步长(Step Size)为0.01,
然后点击开始仿真按钮,进行仿真。
5.2 对小齿轮的进行运动分析。
因为大齿轮的齿数为501=z ,小齿轮的齿数252=z ,模数mm m 4=,
因此根据机械原理可以知道, 对于标准外啮合渐开线直齿圆柱体齿轮传
动,小齿轮的转速为大齿轮的2倍。
对小齿轮的旋转副JOINT_2进行角位置分析。
在ADAMS/View 工作窗口中用鼠标右键点击小齿轮的旋转副JOINT_2,选择Modify 命令,如图5-1所示,在弹出的修改对话框中选择测量(Measures )图标,如图5-2所示。
在弹出的测量对话框中,将Characteristic 栏设置为Ax/Ay/Az Projected Rotation ,将Component 栏设置为Z ,将From/At 栏设置为PART_3.MARKER_5(或者ground.MARKER_6),其他的设置如图5-3所示。
然后点击对话框下面的“OK ”确认。
生成的时间-角度曲线如图5-4所示。
图5-1旋转副属性修改命令
图5-3测量力对话框的设置
图5-2修改对话框
图 5-4 时间和角度的曲线图
由图5-4可以知道,当大齿轮每秒逆时针转过360度时,小齿轮顺时针转过的角度为720度,符合标准外啮合渐开线直齿圆柱体齿轮传动角速度与齿轮的分度圆半径成反比。