变频器通讯USS指令协议
如何通过USS协议实现S7-1200 与G120变频器的通信

如何通过USS协议实现S7-1200 与G120变频器的通信西门子S7-1200 紧凑型PLC在当前的市场中有着广泛的应用,作为经常与SINAMICS G120系列变频器共同使用的PLC,其USS通信协议的使用一直在市场上有着非常广泛的应用。
本文将主要介绍如何使用USS通信协议来实现S7-1200与G120变频器的通信。
1.控制系统原理和接线图下图是本例中所使用的原理和接线图。
图1:控制系统原理和接线图2.硬件需求S7-1200 PLC目前有3种类型的CPU:1)S7-1211C CPU。
2)S7-1212C CPU。
3)S7-1214C CPU。
这三种类型的CPU都可以使用USS通信协议通过通信模块CM1241 RS485来实现S7-1200与G120变频器的通信。
本例中使用的PLC硬件为:1)PM1207电源( 6EP1 332-1SH71 )2)S7-1214C ( 6ES7 214 -1BE30 -0XB0 )3) CM1241 RS485 ( 6ES7 241 -1CH30 -0XB0 )4) 模拟器( 6ES7 274 -1XH30 -0XA0 )本例中使用的G120变频器硬件为:1)SINAMICS G120 PM240 (6SL3244-0BA20-1BA0)2)SINAMICS G120 CU240S(6SL3224-0BE13-7UA0)3)SIEMENS MOTOR (1LA7060-4AB10)4)操作面板( XAU221-001469)5)USS 通信电缆( 6XV1830-0EH10)3.软件需求1) 编程软件Step7 Basic V10.5 ( 6ES7 822-0AA0-0YA0)4.组态我们通过下述的实际操作来介绍如何在Step7 Basic V10.5 中组态S7-1214C 和G120变频器的USS通信。
4. 1 PLC 硬件组态首先在Step7 Basic V10.5中建立一个项目,如图1所示。
西门子S7-200和Micro Master变频器之间的通讯协议USS
西门子S7-200和Micro Master变频器之间的通讯协议USS 传统的PLC与变频器之间的接口大多采用的是依靠PLC的数字量输出来控制变频器的启停,依靠PLC的模拟输出来控制变频器的速度给定,这样做存在以下问题:1、需要控制系统在设计时采用很多硬件,价格昂贵2、现场的布线多容易引起躁声和干扰3、PLC 和变频器之间传输的信息受硬件的限制,交换的信息量很少。
4、在变频器的启停控制中由于继电器接触器等硬件的动作时间有延时,影响控制精度。
5、通常变频器的故障状态由一个接点输出,PLC能得到变频器的故障状态,但不能准确的判断当故障发生时,变频器是何种故障。
如果PLC通过与变频器进行通讯来进行信息交换,可以有效地解决上述问题,通讯方式使用的硬件少,传送的信息量大,速度快,等特点可以有效地解决上述问题,另外,通过网络,可以连续地对多台变频器进行监视和控制,实现多台变频器之间的联动控制和同步控制,通过网络还可以实时的调整变频器的参数。
目前各个厂家的变频器都相继的开发出了支持连网的功能,比如,很多变频器都有了支持现场总线(如:DEVICENET、PROFIBUS、AS_I)等的接口协议,可以很方便的与PLC 进行数据通信。
现在主要介绍西门子S7-200和Micro Master变频器之间的通讯协议USS,使用USS通讯协议,用户可以通过程序调用的方式实现S7-200和Micro Master变频器之间的通信,编程的工作量小,通讯网络由PLC和变频器内置的RS485通讯口和双绞线组成,一台S7-200最多可以和31台变频器进行通讯,这是一种费用低、使用方便的通讯方式。
一、USS通讯协议介绍USS通讯协议的功能,所有的西门子变频器都带有一个RS485通讯口,PLC作为主站,最多允许31个变频器作为通讯连路中的从站,根据各变频器的地址或者采用广播方式,可以访问需要通讯的变频器,只有主站才能发出通讯请求报文,报文中的地址字符指定要传输数据的从站,从站只有在接到主站的请求报文后才可以向从站发送数据,从站之间不能直接进行数据交换。
基于USS协议的串口通信数据在变频器中实现传输的方法_晋景涛
【42】第31卷第11期2009-11基于USS协议的串口通信数据在变频器中实现传输的方法The method of data transmission by serial communication based on USS protocol in inverter control 晋景涛1,葛新锋1,2 JIN Jing-tao1, GE Xin-feng1,2(1. 许昌学院,许昌 461000;2. 南京航空航天大学,南京 210016)摘 要:在我们开发的汽车车桥性能检测的试验系统中,需要无级变速的交流电机作为动力输入。
为实现对交流电机的控制检测,采用PLC通过RS485接口,使用USS协议实现对SIEMENS变频器进行控制,来实现PLC对变频器的参数传递、运行、频率控制以及对其进行实时监控,从而实现对交流电机控制。
实验结果表明,利用PLC很好的实现了上位工控机对变频器的监控。
关键词:串行通信;变频器;USS协议中图分类号:TP206+.1 文献标识码:B 文章编号:1009-0134(2009)11-0042-03收稿日期:2009-01-22作者简介:晋景涛(1978-),男 ,讲师,主要从事机电控制方面的研究。
0 引言在我们开发的汽车车桥性能试验系统中,需要使用无级变速的交流电机作为动力输入,使车桥在不同转速下运转,以便检测车桥在不同工况下的性能。
而保证变频器与上位工控机之间数据的稳定传输是系统可靠运行的关键[1~3]。
在这里我们介绍了SIEMENTS 变频器与西门子公司的SIMATIC S7PLC 上提供的RS-485接口之间串行数据传输的方法[4]。
1 通信原理为了方便、直观地对变频器进行参数设置和运行状态监控操作,可以采用PLC+人机界面的方式,PLC 可以通过数字量、模拟量或通讯接口来控制变频器[4] ;也可以采用计算机通过串行口来控制变频器(要求变频器具有通讯接口)。
USS协议实现S7-1200与G120变频器的通信
如何通过USS协议实现S7-1200 与G120变频器的通信How to communication between S7-1200 and G120 inverter by USS protocol摘要 本文介绍了通过USS 协议实现S7-1200 与G120变频器的通信。
关键词USS 协议,S7-1200,G120,变频器Key Words USS protocol,S7-1200,G120,Frequency converterIA&DT Service & Support Page 2-18目录如何使用USS协议实现S7-1200 与G120变频器的通信 (1)1.控制系统原理和接线图 (4)2.硬件需求 (5)3.软件需求 (5)4.组态 (5)4. 1 PLC 硬件组态 (5)4. 2 G120参数设置 (7)5.USS通信原理与编程的实现 (8)5. 1 S7 1200 PLC与G120 通过USS通信的基本原理 (8)5. 2 S7 1200 PLC进行USS通信的编程 (10)5. 3 S7 1200 PLC进行USS通信的调试 (16)附录-推荐网址 (17)IA&DT Service & Support Page 3-18西门子S7-1200 紧凑型PLC在当前的市场中有着广泛的应用,作为经常与SINAMICS G120系列变频器共同使用的PLC,其USS通信协议的使用一直在市场上有着非常广泛的应用。
本文将主要介绍如何使用USS通信协议来实现S7-1200与G120变频器的通信。
1.控制系统原理和接线图下图是本例中所使用的原理和接线图。
图1:控制系统原理和接线图IA&DT Service & Support Page 4-182.硬件需求S7-1200 PLC目前有3种类型的CPU:1)S7-1211C CPU。
2)S7-1212C CPU。
V20变频器USS通信
页眉内容门子USS通信一、V20变频器参数设置。
1.P0010=30(恢复出厂设置);2.P0970=21(所有参数恢复至出厂设置状态)3.P0003=3 (用户级别:专家)4.P0700=2(命令源:端子)P0700=5(命令源:USS协议)5.P1000=5 (频率设定:USS协议)6.P2023=l (RS485 协议选择:USS 协议)7.P2010=6(波特率:9600)8.P2011=0-31 (协议地址)二、SMART200PLCUSS 指令说明。
S-INIT (初始化)指令。
a.EN:初始化USS-INITb.Mode:模式选择。
“设置为USS通信协议并进行相关初始化。
=0恢复为PPI协议并禁用USS通信cBaud: USS通信波特率。
=1200=2400=4800=9600=19200=38400=57600=115200d.Port:=OCPU 集成的RS485 通信端口。
=1CMO1信号板e.Active:此参数决定网络上的哪些USS从站在通信中有效。
f.Done:初始化完成标志g.Error:初始化错误代码S-CTRL (驱动装置控制)指令。
a.EN:使用SM0.0使能USS-CTRL指令b.Run:启动/停止控制。
=0停止=1运行c.0FF2:停车信号。
此信号为"1”时,电机自由停车。
d.0FF3:停车信号。
此信号为“1”时,将快速停车。
e.F-ACK:故障确认。
f.DIR:电机运转方向=0正转=1反转g.Drive:驱动装置在USS网络上的站号。
页眉内容h.Type:向USS-CTRL功能块指示驱动装置类型。
=0MM3系列,或更早产精心整理品。
=1MM4 系列,SINAMICSG110, SINAMICSV20l.SpeedSP:速度设定值。
0-50HZ 对应0.0-100.0J. Resp-R:从站应答确认信号。
K. Error:错误代码。
L.Status:驱动装置的状态字。
使用uss协议库的s7-200与变频器通信
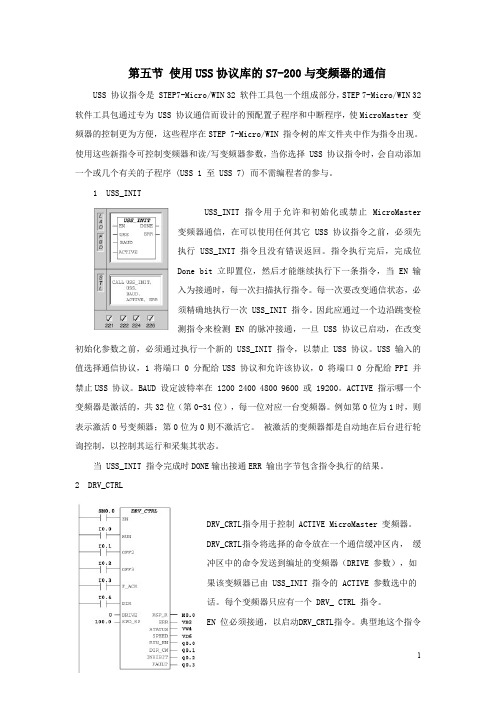
第五节使用USS协议库的S7-200与变频器的通信USS 协议指令是 STEP7-Micro/WIN 32 软件工具包一个组成部分,STEP 7-Micro/WIN 32 软件工具包通过专为 USS 协议通信而设计的预配置子程序和中断程序,使MicroMaster 变频器的控制更为方便,这些程序在STEP 7-Micro/WIN 指令树的库文件夹中作为指令出现。
使用这些新指令可控制变频器和读/写变频器参数,当你选择 USS 协议指令时,会自动添加一个或几个有关的子程序 (USS 1 至 USS 7) 而不需编程者的参与。
1 USS_INITUSS_INIT 指令用于允许和初始化或禁止 MicroMaster变频器通信,在可以使用任何其它 USS 协议指令之前,必须先执行 USS_INIT 指令且没有错误返回。
指令执行完后,完成位Done bit 立即置位,然后才能继续执行下一条指令,当 EN 输入为接通时,每一次扫描执行指令。
每一次要改变通信状态,必须精确地执行一次 USS_INIT 指令。
因此应通过一个边沿跳变检测指令来检测 EN 的脉冲接通,一旦 USS 协议已启动,在改变初始化参数之前,必须通过执行一个新的 USS_INIT 指令,以禁止 USS 协议。
USS 输入的值选择通信协议,1 将端口 0 分配给USS 协议和允许该协议,0 将端口0 分配给PPI 并禁止USS 协议。
BAUD 设定波特率在 1200 2400 4800 9600 或 19200。
ACTIVE 指示哪一个变频器是激活的,共32位(第0-31位),每一位对应一台变频器。
例如第0位为1时,则表示激活0号变频器;第0位为0则不激活它。
被激活的变频器都是自动地在后台进行轮询控制,以控制其运行和采集其状态。
当 USS_INIT 指令完成时DONE输出接通ERR 输出字节包含指令执行的结果。
2 DRV_CTRLDRV_CRTL指令用于控制 ACTIVE MicroMaster 变频器。
在S7-200 Smart 程序中使用USS协议的五步骤
要在S7-200 SMART程序中使用USS协议指令,请按以下步骤操作:
1.在程序中插入USS_INIT指令,并仅执行USS_INIT指令一个扫描周期。
可以使用USS_INIT指令初始化或更改USS协议通信参数。
插入口USS_INIT指令时,会在程序中自动添加若干隐藏的子例程和中断例程。
2.只能在程序中为每台激活变频器放置一条USS_CTRL指令。
可以根据需要增加任意数量的USS_RPM_X和USS_WPM_X指令,但某一时间只能有一条指令处于激活状态。
3.在“文件”(FILE)菜单功能区的“库”(Libranries)区域中单击“存储器”按钮
存储器,为USS库所需的V存储器分配起始地址。
或者,也可在项目树中右键单击“程序块”节点,并从上下文菜单中选择“库存储器”。
4.组态变频器参数,使之与程序中使用的波特率和地址相匹配。
5.用通信电缆连接S7-200 SMART CPU模块( 6ES7 214-2BD23-0XB8)与变频器。
确保与变频器连接的所有控制设备(例如S7-200 SMART CPU〕均用短粗电缆连接到变频器使用的接地点或星点。
PLC通过USS协议网络控制变频器的运行
SIEMENS
S7-200 PLC、变频器与触摸屏综合应用 、
多媒体教学光盘
主讲教师:阳胜峰
主讲:阳胜峰
QQ:541351955
S7-200 PLC、变频器与触摸屏综合应用
SIEMENS
通过USS协议网络 第8讲 PLC通过 讲 通过 协议网络 控制变频器的运行
SIEMENS
二、USS协议专用指令 协议专用指令
使用USS指令,首先要安装指令库,正确安装结束后,打开指令树 中的“库”项,出现多个USS协议指令,如图所示,且会自动添加一 个或几个相关的子程序。
主讲:阳胜峰
QQ:541351955
S7-200 PLC、变频器与触摸屏综合应用
SIEMENS
1、USS_INT指令 、 指令
主讲:阳胜峰 QQ:541351955
S7-200 PLC、变频器与触摸屏综合应用
SIEMENS
2、USS_CTRL 、
USS_CTRL指令用于控制处于激活状态的变频器, 每台变频器只能使用一条该指令。 指令说明: 指令说明: (1)USS_CTRL(端口0)或USS_CTRL_P1 (端口1)指令被用于控制ACTIVE(激活)驱动器。 1 ACTIVE USS_CTRL指令将选择的命令放在通信缓冲区中,然 后送至编址的驱动器DRIVE(驱动器)参数,条件是 已在USS_INIT指令的ACTIVE(激活)参数中选择该 驱动器。 (2)仅限为每台驱动器指定一条USS_CTRL 指令。
主讲:阳胜峰
QQ:541351955
S7-200 PLC、变频器与触摸屏综合应用
SIEMENS
(3)某些驱动器仅将速度作为正值报告。如果速度为负值, 驱动器将速度作为正值报告,但逆转D_Dir(方向)位。 (4)EN位必须为ON,才能启用USS_CTRL指令。该指令应 当始终启用。 (5)RUN表示驱动器是ON还是OFF。当RUN(运行)位为 ON时,驱动器收到一条命令,按指定的速度和方向开始运行。为了 使驱动器运行,必须符合以下条件: 1)DRIVE(驱动器)在USS_INIT中必须被选为ACTIVE ( 激活)。 2)OFF2和OFF3必须被设为0。 3)Fault(故障)和Inhibit(禁止)必须为0。
应用USS协议实现变频调速的拓展
钮、设置变频器运动方向开关、设置变频器减速停止方式开关、设置
西门子公司生产的 S7 系列 PLC 功能强大、可靠性高、指令丰 变频器故障清除按钮。
富、易于扩展、强劲的通信能力,适用于各行各业、各种场合中的检
③设置变频器参数
测、监测及控制的自动化。西门子变频器结构紧凑、内部配置灵活、 a.恢复出厂设置:
efficiency,easy operation,easy to interface with other equipment. USS protocol used for communication between PLC and inverter can compensate for the
lack of hardware interface converter and could realize multi-level reversible speed.
关 键 词 :变频调速;协议;通信
Key words: frequency conversion;agreement;communication
中 图 分 类 号 :TM57
文 献 标 识 码 :A
文 章 编 号 :1006-4311(2010)15-0008-01
1 USS 协议
USS 通信占用 0 号通信接口,在选择使用 USS 协议与驱动通信
Abstract: With the development of power electronics,microelectronics and large scale integrated circuits,motor speed control has developed from
the relay control times to frequency control times. Converter has the advantages of wide speed range,speed and high precision,quick response,high
西门子V20变频器与S7-200之间的USS通讯详解
西门子V20变频器与S7-200之间的USS通讯详解1、本例程的系统配置:(1)安装Step7 Micro/Win V4.0 SP6软件和USS协议V2.3,软件下载地址:西门子标准库指令:/download/searchResult.aspx?searchText=S0010Micro/WIN V4.0 SP6软件下载地址:/download/searchResult.aspx?searchText=S0002(2)PC/PPI电缆、S7-200、电源模块、通信电缆。
(3)V20驱动装置和一台PC机。
2、在使用MicroWin software 创建项目之前,确认USS库文件已经安装:3、创建一个例程:3.1 设置通讯接口本例程使用PC/PPI电缆。
3.2 建立PC和PLC之间的连接“双击刷新”搜索到PLC后,点击”确认”。
3.3 用电缆将S7-200 Port 0端口与V20的RS485接口相连(注意端口连接规则:V20的 P+对3、N-对8),如下图所示:3.4 变频器参数设置:V20 可以通过选择连接宏Cn010实现USS控制,也可以通过直接更改变频器参数的方法来实现。
参数设置如下表所示:表一:参数描述Cn010默认值实际设置备注P0700[0] 选择命令源 5 5 RS485为命令源P1000[0] 选择频率 5 5 RS485为速度设定值P2023 RS485协议选择 1 1 USS协议P2010[0] USS/MODBUS波特率8 6 波特率为9600bps P2011[0] USS地址 1 3 变频器的USS地址P2012[0] USS PZD长度 2 2 PZD部分的字数P2013[0] USS PKW长度127 127 PKW部分字数可变P2014[0] USS/MODBUS报文间断时间500 0 接收数据时间3.5 使用USS协议的初始化模块初始化S7-200的PORT0端口:EN使能:每次改变通讯状态都应该执行一次初始化指令。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
USS-INT指令详解
EN:初始化程序USS_INIT 只需在程序中执行一个周期就能改变通信口的功能,以及进行其他一些必要的初始设置,因此可以使用SM0.1 或者沿触发的接点调用USS_INIT 指令;
Mode:模式选择,执行USS_INIT 时,Mode 的状态决定是否在Port 0 上使用USS 通信功能;
= 1 设置Port 0 为USS 通信协议并进行相关初始化
0 恢复Port 0 为PPI 从站模式
Baud:USS 通信波特率。
此参数要和变频器的参数设置一致;
= 2400 2400 bit/s
4800 4800 bit/s
9600 9600 bit/s
19200 19200 bit/s
38400 38400 bit/s
57600 57600 bit/s
115200 115200 bit/s
Active:此参数决定网络上的哪些USS 从站在通信中有效。
详见下面的说明;Done:初始化完成标志
Error:初始化错误代码
孤陋寡闻,我从来没看过有DRV-CTRL这条指令
USS-CTRL指令详解
EN:使用SM0.0 使能USS_CTRL 指令
RUN:驱动装置的启动/停止控制
= 0 停止
1 运行
此停车是按照驱动装置中设置的斜坡减速指电机停止
OFF2:停车信号2。
此信号为“1"时,驱动装置将封锁主回路输出,电机自由停车
OFF3:停车信号3。
此信号为”1"时,驱动装置将快速停车
F_ACK:故障确认。
当驱动装置发生故障后,将通过状态字向USS 主站报告;如果造成故障的原因排除,可以使用此输入端清除驱动装置的报警状态,即复位。
注意这是针对驱动装置的操作。
DIR:电机运转方向控制。
其“0/1”状态决定运行方向
Drive:驱动装置在USS 网络上的站号。
从站必须先在初始化时激活才能进行控制
Type:向USS_CTRL 功能块指示驱动装置类型
= 0 MM 3 系列,或更早的产品
1 MM 4 系列,SINAMICS G 110
Speed_SP:速度设定值。
速度设定值必须是一个实数,给出的数值是变频器的频率范围百分比还是绝对的频率值取决于变频器中的参数设置(如MM 440 的P2009)
Resp_R:从站应答确认信号。
主站从USS 从站收到有效的数据后,此位将为“1"一个程序扫描周期,表明以下的所有数据都是最新的
Error:错误代码。
0 = 无出错。
其他错误代码请参考
Status:驱动装置的状态字。
此状态字直接来自驱动装置的状态字,表示了当时的实际运行状态
详细的状态字信息意义请参考相应的驱动装置手册。
Speed:驱动装置返回的实际运转速度值,实数。
是否频率值跟随设定值的规格化设定
Run_EN:运行模式反馈,表示驱动装置是运行(为1)还是停止(为0)
D_Dir:指示驱动装置的运转方向,反馈信号
Inhibit:驱动装置禁止状态指示(0 - 未禁止,1 - 禁止状态)。
禁止状态下驱动装置无法运行。
要清除禁止状态,故障位必须复位,并且RUN, OFF2 和OFF3 都为0
Fault:故障指示位(0 - 无故障,1 - 有故障)。
表示驱动装置处于故障状态,驱动装置上会显示故障代码(如果有显示装置)。
要复位故障报警状态,必须先消除引起故障的原因,然后用F_ACK 或者驱动装置的端子、或操作面板复位故障状态。
此USS_CTRL 功能块使用了PZD 数据读写机制,传输速度比较快。
但由于它还是串行通信,而且还可能有多个从站需要轮询,因此无法做到”实时“响应。
要实现高要求的快速通信,应该使用PROFIBUS-DP 等网络,同时更换主站为更高级的控制器。
也由于同样的原因,USS_CTRL 输入的控制信号需要一个合理的作用时间,以等待指令执行完成,过快速的变化可能会导致没有响应。
USS_CTRL 已经能完成基本的驱动装置控制,如果需要有更多的参数控制选项,可以选用USS 指令库中的参数读写指令实现。