控制工程基础实验报告
控制工程基础仿真实验报告

本科生课程论文控制工程基础仿真实验报告实验一一阶系统的单位阶跃响应一、实验目的1、学会使用ATLABM编程绘制控制系统的单位阶跃响应曲线;2、掌握准确读取动态特征指标的方法;3、研究时间常数T对系统性能的影响;4、掌握一阶系统11Ts+时间响应分析的一般方法;5、通过仿真实验,直观了解各典型环节的时间响应和频率响应,巩固课程中所学的基本概念和基本原理;二、实验要求1、输入3个不同的时间常数T,观察一阶系统11Ts+的单位阶跃响应曲线的变化,绘制响应曲线图,并分析时间常数T对系统性能的影响。
2、若通过实验已测得一阶系统11Ts+的单位阶跃响应曲线,试说明如何通过该曲线确定系统的时间常数T。
三、实验内容(一)实验设备计算机;WINDOWS操作系统,并安装Matlab语言编程环境。
(二)实验原理通过对各种典型环节的仿真实验,可以直观的看到各种环节的时间响应和频率响应的图像。
通过对所得图像的分析可以得出各种参数如何影响系统的性能。
四、实验过程在Matlab平台对一阶系统11Ts+的单位阶跃响应进行仿真。
(1)输入3个不同的时间常数T,观察一阶系统单位阶跃响应曲线的变化,绘制响应曲线图,并分析时间常数T对系统性能的影响。
在Matlab中进行操作,其代码如下:1.num=1;2.den=[11];3.g=tf(num,den)4.5.g =6.7.18. -----9. s + 110.11.Continuous-time transfer function.12.13.>> step(g)14.hold on15.>> step(tf(1,[21]))16.>> step(tf(1,[41]))17.>> legend('T=1','T=2','T=4');(2)对于已测得的一阶系统的单位阶跃响应曲线,分析通过该曲线确定系统的时间常数T的方法。
南京理工大学控制工程基础实验报告
《控制工程基础》实验报告姓名欧宇涵 914000720206周竹青 914000720215 学院教育实验学院指导老师蔡晨晓南京理工大学自动化学院2017年1月实验1:典型环节的模拟研究一、实验目的与要求:1、学习构建典型环节的模拟电路;2、研究阻、容参数对典型环节阶跃响应的影响;3、学习典型环节阶跃响应的测量方法,并计算其典型环节的传递函数。
二、实验内容:完成比例环节、积分环节、比例积分环节、惯性环节的电路模拟实验,并研究参数变化对其阶跃响应特性的影响。
三、实验步骤与方法(1)比例环节图1-1 比例环节模拟电路图比例环节的传递函数为:K s U s U i O =)()(,其中12R RK =,参数取R 2=200K ,R 1=100K 。
步骤: 1、连接好实验台,按上图接好线。
2、调节阶跃信号幅值(用万用表测),此处以1V 为例。
调节完成后恢复初始。
3、Ui 接阶跃信号、Uo 接IN 采集信号。
4、打开上端软件,设置采集速率为“1800uS”,取消“自动采集”选项。
5、点击上端软件“开始”按键,随后向上拨动阶跃信号开关,采集数据如下图。
图1-2 比例环节阶跃响应(2)积分环节图1-3 积分环节模拟电路图积分环节的传递函数为:ST V V I I O 1-=,其中T I =RC ,参数取R=100K ,C=0.1µf 。
步骤:同比例环节,采集数据如下图。
图1-4 积分环节阶跃响应(3)微分环节图1-5 微分环节模拟电路图200KRV IVoC2CR 1V IVo200K微分环节的传递函数为:K S T S T V V D D I O +-=1,其中 T D =R 1C 、K=12R R。
参数取:R 1=100K ,R 2=200K ,C=1µf 。
步骤:同比例环节,采集数据如下图。
图1-6 微分环节阶跃响应(4)惯性环节图1-7 惯性环节模拟电路图惯性环节的传递函数为:1+-=TS K V V I O ,其中2T R C =,21RK R =-。
南理工控制工程基础实验报告

南理工控制工程基础实验报告成绩:《控制工程基础》课程实验报告班级:学号:姓名:南京理工大学2015年12月《控制工程基础》课程仿真实验一、已知某单位负反馈系统的开环传递函数如下G(s)?10 s2?5s?25借助MATLAB和Simulink完成以下要求:(1) 把G(s)转换成零极点形式的传递函数,判断开环系统稳定性。
>> num1=[10]; >> den1=[1 5 25]; >> sys1=tf(num1,den1) 零极点形式的传递函数:于极点都在左半平面,所以开环系统稳定。
(2) 计算闭环特征根并判别系统的稳定性,并求出闭环系统在0~10秒内的脉冲响应和单位阶跃响应,分别绘出响应曲线。
>> num=[10];den=[1,5,35]; >>sys=tf(num,den); >> t=[0::10]; >> [y,t]=step(sys,t); >> plot(t,y),grid >> xlabel(‘time(s)’) >> ylabel(‘output’) >> hold on; >> [y1,x1,t]=impulse(num,den,t); >> plot(t,y1,’:’),grid (3) 当系统输入r(t)?sin5t时,运用Simulink搭建系统并仿真,用示波器观察系统的输出,绘出响应曲线。
曲线:二、某单位负反馈系统的开环传递函数为:6s3?26s2?6s?20G(s)?4频率范围??[,100] s?3s3?4s2?2s?2 绘制频率响应曲线,包括Bode图和幅相曲线。
>> num=[6 26 6 20]; >> den=[1 3 4 2 2]; >> sys=tf(num,den); >> bode(sys,{,100}) >> grid on >> clear; >> num=[6 26 6 20]; >> den=[1 3 4 2 2]; >> sys=tf(num,den); >> [z , p , k] = tf2zp(num, den); >> nyquist(sys) 根据Nyquist判据判定系统的稳定性。
控制工程基础实验报告
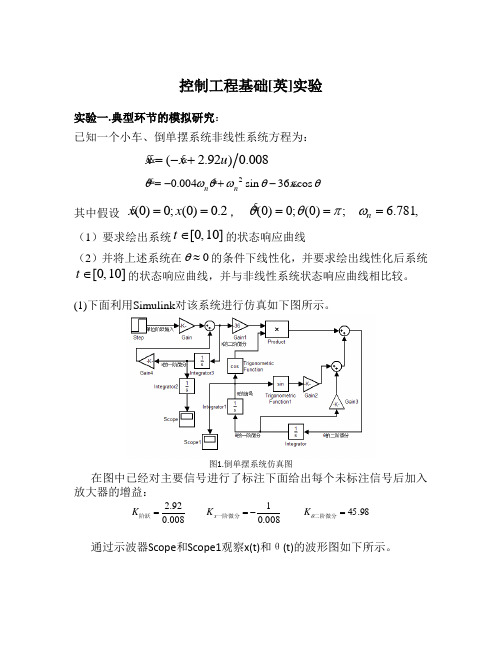
控制工程基础[英]实验实验一.典型环节的模拟研究:已知一个小车、倒单摆系统非线性系统方程为:( 2.92)0.008x x u =-+20.004sin 36cos n n x θωθωθθ=-+-其中假设 (0)0;(0)0.2x x ==,(0)0;(0); 6.781,n θθπω===(1)要求绘出系统[0,10]t ∈的状态响应曲线(2)并将上述系统在0θ≈的条件下线性化,并要求绘出线性化后系统[0,10]t ∈的状态响应曲线,并与非线性系统状态响应曲线相比较。
(1)下面利用Simulink 对该系统进行仿真如下图所示。
图1.倒单摆系统仿真图在图中已经对主要信号进行了标注下面给出每个未标注信号后加入放大器的增益:008.092.2=阶跃K 008.01-=一阶微分x K 98.45=二阶微分θK通过示波器Scope 和Scope1观察x(t)和θ(t)的波形图如下所示。
图2.x(t)波形图3.θ(t)波形(2)将上述系统在0θ≈的条件下线性化,则方程组改写成如下形式:( 2.92)0.008x x u=-+20.004sin36n n xθωθωθ=-+-在Simulink中对系统仿真如下所示。
图4.线性化后仿真系统通过示波器模块可以观察输出信号,图形如下图所示。
图5.x(t)输出波形图6.θ(t )输出波形实验二.典型系统时域响应动、静态性能和稳定性研究; 已知系统的开环传递函数为2()11G s s s =++(1)利用已知的知识判断该开环系统的稳定性(系统的特征方程根、系统零极点表示法)。
(2)判别系统在单位负反馈下的稳定性,并求出闭环系统在[0,10]t ∈内的脉冲响应和单位阶跃响应,分别绘制出相应响应曲线。
(1)该系统的特征方程的根、零极点表示的求解代码如下:输出结果如下图所示。
图7.特征方程求根结果图8.零极点分布图从图中可以看出两个极点在虚轴上,所以该系统处于临界稳定状态。
控制工程基础实验报告
控制工程基础实验报告控制工程基础实验报告引言:控制工程是一门涉及自动化、电子、计算机等多个学科的交叉学科,其实验是培养学生动手能力和实践能力的重要环节。
本篇文章将以控制工程基础实验为主题,探讨实验的目的、过程和结果等方面。
实验目的:控制工程基础实验的目的是让学生通过实践了解控制系统的基本原理和方法,培养其分析和解决问题的能力。
通过实验,学生可以掌握闭环控制系统的设计与调试技巧,加深对控制理论的理解。
实验内容:本次实验的内容是设计一个简单的温度控制系统。
系统由温度传感器、控制器和加热器组成。
温度传感器采集环境温度,控制器根据设定的温度值来控制加热器的工作状态,以维持温度在设定值附近。
实验步骤:1. 搭建实验平台:将温度传感器、控制器和加热器按照实验要求连接起来,确保电路正常工作。
2. 设计控制算法:根据控制系统的要求,设计合适的控制算法。
可以采用比例控制、积分控制或者PID控制等方法。
3. 参数调试:根据实验平台和控制算法的特点,调试控制器的参数,使系统能够快速、稳定地响应设定值的变化。
4. 实验数据采集:通过实验平台上的数据采集器,记录系统的输入和输出数据,以便后续分析和评估。
实验结果:经过实验,我们得到了一组温度控制系统的数据。
通过对这些数据的分析,我们可以评估系统的控制性能和稳定性。
在实验中,我们使用PID控制算法,经过参数调试,得到了较好的控制效果。
系统能够在设定值附近稳定工作,并且对设定值的变化能够快速响应。
实验总结:通过这次实验,我们深入了解了控制工程的基本原理和方法。
实践中遇到的问题和挑战,锻炼了我们的动手能力和解决问题的能力。
实验结果表明,合适的控制算法和参数调试是实现良好控制效果的关键。
控制工程实验的重要性不言而喻,它不仅是理论学习的延伸,更是培养学生实践能力的重要途径。
结语:控制工程基础实验是掌握控制工程理论和方法的重要环节。
通过实践,学生能够更好地理解和应用所学知识,提高解决实际问题的能力。
燕山大学控制工程基础实验报告(带数据)
自动控制理论实验报告实验一典型环节的时域响应院系:班级:学号:姓名:实验一 典型环节的时域响应一、 实验目的1.掌握典型环节模拟电路的构成方法,传递函数及输出时域函数的表达式。
2.熟悉各种典型环节的阶跃响应曲线。
3.了解各项参数变化对典型环节动态特性的影响。
二、 实验设备PC 机一台,TD-ACC+教学实验系统一套。
三、 实验步骤1、按图1-2比例环节的模拟电路图将线接好。
检查无误后开启设备电源。
注:图中运算放大器的正相输入端已经对地接了100k 电阻。
不需再接。
2、将信号源单元的“ST ”端插针与“S ”端插针用“短路块”接好。
将信号形式开关设为“方波”档,分别调节调幅和调频电位器,使得“OUT ”端输出的方波幅值为1V ,周期为10s 左右。
3、将方波信号加至比例环节的输入端R(t), 用示波器的“CH1”和“CH2”表笔分别监测模拟电路的输入R(t)端和输出C(t)端。
记录实验波形及结果。
4、用同样的方法分别得出积分环节、比例积分环节、惯性环节对阶跃信号的实际响应曲线。
5、再将各环节实验数据改为如下:比例环节:;,k R k R 20020010== 积分环节:;,u C k R 22000==比例环节:;,,u C k R k R 220010010=== 惯性环节:。
,u C k R R 220010=== 用同样的步骤方法重复一遍。
四、 实验原理、内容、记录曲线及分析下面列出了各典型环节的结构框图、传递函数、阶跃响应、模拟电路、记录曲线及理论分析。
1.比例环节 (1) 结构框图:图1-1 比例环节的结构框图(2) 传递函数:K S R S C =)()( KR(S)C(S)(3) 阶跃响应:C(t = K ( t ≥0 ) 其中K = R 1 / R 0 (4) 模拟电路:图1-2 比例环节的模拟电路图(5)记录曲线:(6)k R k R 20020010==,时的记录曲线:_R0=200kR1=100k_ 10K10KC(t)反相器 比例环节 R(t)(7)曲线分析:比例放大倍数K 与1R 的阻值成正比。
2022年南理工机械院控制工程基础实验报告方案

试验1 模拟控制系统在阶跃响应下特性试验一、试验目根据等效仿真原理,运用线性集成运算放大器及分立元件构成电子模拟器,以干电池作为输入信号,研究控制系统阶跃时间响应。
二、试验内容研究一阶与二阶系统构造参数变化,对系统阶跃时间响应影响。
三、试验成果及理论分析1.一阶系统阶跃响应a.电容值1uF,阶跃响应波形:b.电容值2.2uF,阶跃响应波形:c. 电容值4.4uF ,阶跃响应波形:2. 一阶系统阶跃响应数据表电容值 (uF ) 稳态终值U c (∞)(V ) 时间常数T(s) 理论值 实际值 理论值 实际值 1.0 2.87 2.90 0.51 0.50 2.2 2.87 2.90 1.02 1.07 4.42.872.902.242.06元器件实测参数U r = -2.87VR o =505k ΩR 1=500k ΩR 2=496k Ω其中C R T 2=r c U R R U )/()(21-=∞误差原因分析:①电阻值及电容值测量有误差;②干电池电压测量有误差;③在示波器上读数时产生误差;④元器件引脚或者面包板老化,导致电阻变大;⑤电池内阻影响输入电阻大小。
⑥在C=4.4uF试验中,受硬件限制,读数误差较大。
3.二阶系统阶跃响应a.阻尼比为0.1,阶跃响应波形:b.阻尼比为0.5,阶跃响应波形:c.阻尼比为0.7,阶跃响应波形:d.阻尼比为1.0,阶跃响应波形:4.二阶系统阶跃响应数据表ξR w(Ω)峰值时间t p(s)U o(t p)(V)调整时间t s(s)稳态终值U s(V)超调(%)M p震荡次数N0.1 454k 0.3 4.8 2.8 2.95 62.7 6 0.5 52.9k 0.4 3.3 0.5 2.95 11.9 10.7 24.6k 0.4 3.0 0.3 2.92 2.7 11.02.97k 1.0 2.98 1.0 2.98 0 0四、回答问题1.为何要在二阶模拟系统中设置开关K1和K2,并且必须同步动作?答:K1作用是用来产生阶跃信号,撤除输入信后,K2则是构成了C2放电回路。
控制工程基础实验报告
控制工程基础实验姓名:专业:机电班级:02 学号:1003120225实验一:比较二阶系统在不同阻尼比下的时间响应一、实验目的1.熟悉MA TLAB软件环境,学会编写matlab文件(***.m)和使用SIMULINK建模,进行时间响应分析。
二、实验要求1.编写m文件,使用命令sys=tf(num,den),建立二阶系统的传递函数模型;2.编写m文件,使用命令impulse(sys),画出二阶系统在不同阻尼比下的脉冲响应曲线簇;3.编写m文件,使用命令step(sys),画出二阶系统在不同阻尼比下的阶跃响应曲线簇;4.根据阶跃响应曲线,记录不同阻尼比下的时域性能指标,列表写出实验报告,并分析阻尼比和无阻尼自然频率对于性能的影响;5.利用SIMULINK建立方框图仿真模型,进行阶跃响应实验,学会使用workspace的数组变量传递,使用命令plot(X,Y)画出阶跃响应图。
三、实验过程1.编写m文件,使用命令sys=tf(num,den),建立二阶系统的传递函数模型M文件如下:clear;clc;num=[1];den=[1 2 1];sys=tf(num,den)运行结果:Transfer function:1-------------s^2 + 2 s + 12.编写m文件,使用命令impulse(sys),画出二阶系统在不同阻尼比下的脉冲响应曲线簇M文件如下:clear;clc;k=1;xi=[0.1 0.4 0.8 1 5 8];wn=1;for i=1:length(xi);sys=tf([k*wn^2],[1 2*xi(i)*wn wn^2]);impulse(sys);hold on;endhold offgrid运行结果:3.编写m文件,使用命令step(sys),画出二阶系统在不同阻尼比下的阶跃响应曲线簇M文件如下:clear;clc;k=1;xi=[0.1 0.4 0.8 1 5 8];wn=1;for i=1:length(xi);sys=tf([k*wn^2],[1 2*xi(i)*wn wn^2]);step(sys);hold on;endhold offgrid运行结果:4.根据阶跃响应曲线,记录不同阻尼比下的时域性能指标,列表写出实验报告,并分析阻尼比和无阻尼自然频率对于性能的影响利用时域响应特性函数function [tr,tp,mp,ts,td]=texing(sys,xi,m,n)求得系统在不同阻尼比xi下阶跃响应的时域特性指标(texing函数见附录)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制工程基础实验报告实验一 典型环节及其阶跃响应实验目的1.学习构成典型环节的模拟电路。
2.熟悉各种典型环节的阶跃响应曲线,了解参数变化对典型环节动态特性的影响。
3.学会由阶跃响应曲线计算典型环节的传递函数。
4.熟悉仿真分析软件。
实验内容各典型环节的模拟电路如下:1. 比例环节 12)(R R s G -=2. 惯性环节 RC T Tss G =-=1)(3. 积分环节 1221)(R R K C R T Ts Ks G ==+-=4. 微分环节 RCs s G -=)(改进微分环节1)(12+-=Cs R Cs R s G 5. 比例微分环节)41()(212s C R R R s G +-=实验步骤1.用Workbench 连接好比例环节的电路图,将阶跃信号接入输入端,此时使用理想运放;2.用示波器观察输出端的阶跃响应曲线,测量有关参数;改变电路参数后,再重新测量,观察曲线的变化。
3. 将运放改为实际元件,如采用“LM741",重复步骤2。
5.仿真其它电路,重复步骤2,3,4。
实验总结通过这次实验,我对典型环节的模拟电路有了更加深刻的了解,也熟悉了各种典型环节的阶跃响应曲线,了解参数变化对典型环节动态特性的影响;熟悉仿真分析软件。
这对以后的控制的学习有很大的帮助。
实验二 二阶系统阶跃响应实验目的1. 研究二阶系统的两个重要参数阻尼比ξ和无阻尼自然频率ωn 对系统动态性能的影响。
2. 学会根据阶跃响应曲线确定传递函数,熟悉二阶系统的阶跃响应曲线。
实验内容二阶系统模拟电路如图: 1)/(1)(12222++-=RCs R R s C R s G 思考:如何用电路参数表示ξ和ωn实验步骤1. 在workbench 下连接电路图;将阶跃信号接入输入端,用示波器观测记录响应信号;2.取ωn=10rad/s,即令R=100K,C=1uf :分别取ξ=0,0.25,0.5,0.7,1,2, 即取R1=100K,考虑R2应分别取何值,分别测量系统阶跃响应,并记录最大超调量δp%和调节时间ts 。
3. 取ξ=0.5,即R1=R2=100K ;ωn=100rad/s ,即取R=100K ,C=0.1uf ,注意:两个电容同时改变,测量系统阶跃响应,并记录最大超调量δp%和调节时间ts 。
4. 取R=100K ,C=1uf ,R1=100K ,R2=50K ,测量系统阶跃响应,记录响应曲线,特别要记录最大超调量δp%和调节时间ts 的数值。
5. 记录波形及数据。
6. 取C=1nF ,比较理想运放和实际运放情况下系统的阶跃响应。
实验分析由实验可知:二阶系统的阶跃响应的超调量δp与ωn无关:在0<ξ<1时,即欠阻尼情况下,δp随ξ增大而减小,在欠阻尼情况下,ξ在0.7左右时ts 取得极值;当0<ξ<ξ(阻尼比临界值),ωn 不变的情况下,t s随ξ增大而减小;当ξ>rξ,ξ越大,ts 越大。
r实验总结通过本次实验,我研究二阶系统的两个重要参数阻尼比ξ和无阻尼自然频率ωn对系统动态性能的影响,同时学会根据阶跃响应曲线确定传递函数,熟悉二阶系统的阶跃响应曲线。
基本完成实验任务。
实验三 控制系统的稳定性分析实验目的1. 观察系统的不稳定现象。
2. 研究系统开环增益和时间常数对稳定性的影响。
实验电路图系统模拟电路如图: 其开环传递函数:RC T R R K Ts s s Ks G ==++=,2/3)1)(11.0(10)(实验步骤1.在workbench 下连接电路图;将阶跃信号接入输入端,用示波器观测记录响应信号;2. 输入信号电压设置为1V ,C=1uf ,改变电位器R3,使之从0向500K 方向变化,此时相应K=0-100。
观察输出波形,找到系统输出产生增幅振荡时相应的R3及K 值;再把R3由大变小,找出系统输出产生等幅振荡时相应的R3及K 值。
3.使系统工作在不稳定状态,即工作在等幅振荡情况,电容C 由1uf 变成0.1u ,观察系统稳定性的变化。
4. 记录波形及数据。
R3=130K时R3=110K时当R3=76K时当C=0.1K时R3=76K R3=110K实验分析C=1uf 时系统闭环传递函数: RC T R R K K s s s Ks G ==+++=,2/310)11.0)(11.0(10)(系统特征方程:0102.001.023=+++K s s s由劳斯判据系统稳定条件:K>0且10K*0.01<0.2*1得0<K<2系统不稳定的原因:当K>=2时,系统含有实部大于0的极点,根据稳定性判剧,当系统有一个或一个以上实部大于0的极点时系统不稳定。
实验结论通过这次实验,观察系统的不稳定现象,了解系统开环增益和时间常数对稳定性的影响。
由闭环传函的劳斯判据,可以观察到开环增益对系统稳定性的影响。
我们通过这次试验,对上课所讲的不稳定现象有了很深的了解,对劳斯判据的应用有了实际的运用,这对以后的控制知识的学习有很大的意义。
实验四 系统频率特性测量实验目的1. 加深了解系统频率特性的物理概念;2. 掌握系统频率特性的测量方法;3. 观察典型环节的频响图。
实验内容模拟电路图如下:若输入信号Ui(t)=UiSin ωt,则在稳态时,其输出信号为Uo(t)=UoSin(ωt+Ψ)。
改变输入信号角频率ω值,便可测得二组Uo/Ui 和Ψ随ω变化的数值,这个变化规律 就是系统的幅频特性和相频特性。
系统传递函数为:2/310010100)(2R R K Ks s Ks G =++=实验步骤1. 连接电路图;将函数发生器信号接入输入端,用示波器观测记录响应信号;2. 在函数发生器参数设置一栏中,置输入信号为正弦波,改变输入频率参数,分别设ω=0.1,0.5,1,3,5,7,10,20,30,40,50。
3. 运行仿真命令,观察输出波形及其幅值和相位差。
4. 改变输入频率参数,重复步骤2和3,期间改变幅值项参数,以使输出波形达到最佳。
5.将C=0.01uF,观察系统的Bode 图;改变运放的型号(LM741),观察Bode 图。
ω=0.5 ω=1ω=5 ω=7ω=20ω=30ω=50ω=5ω=10 ω=20ω=40 ω=50实验总结通过本次实验,了解了系统频率特性的物理概念并且初步掌握系统频率特性的测量方法,观察典型环节的频响图,成功的完成实验要求的内容。
实验五 开环频率特性与系统性能的关系实验目的1.观察两类不同类型的开环频率特性与系统性能的关系; 2.检验中频段的形状对系统动态性能的影响;3.了解低频段的大时间常数和高频段的小时间常数对系统性能的影响。
实验原理由于开环对数频率特性比较容易求得,因而建立它与系统性能之间的关系对控制系统的分析和设计十分有用。
利用电子模拟实验可以更好突出主要因素,避免实际系统中存在的次要因素的影响。
同时利用电子模拟装置,参数的改变比较方便,更利于进行实验研究。
为了便于研究,本实验选择两种典型的开环模型:第一类系统的开环模型(图A5.1)、 第二类系统的开环模型(图A5.2)。
很多实际系统具有与它们相似的特性。
图A5.1图A5.2 图A5.1所示开环模型的传递函数为)1)(1()(21++=S T s T s K s Q 其中w1=1/T1,w2=1/T2。
实现上述传递函数,可采用如图A5.3的模拟线路。
图5.3由图可得 K=K1K2K3, K1=1/R1/C1,K2=R3/R2, K3=R5/R4,T1=R3C2, T2=R5C3 而图A5.2所示开环模型的传递函数为)1)(1()1()(312+++=S T s T s s T K s Q 其中 w1=1/T1, w2=1/T2, w3=1/T3采用图A5.4所示的模拟实验线路可获得该开环模型的传递函数。
图A5.4由图可得 K=K1K2K3, K1=1/R1/C1,K2=R3/R2, K3=R6/R5,通过改变R、C参数,可得到不同形状的开环频率特性。
同时观测输出电压的阶跃过渡过程,即可研究二者之间的相互关系。
实验内容l. 第一类系统开环频率特性的形状与系统性能的关系采用图A5.3的实验线路。
取Rl=50k,Cl=1uF,R2=20k,C2=1uF,R3=20k,R3=50k,C3=0.1uF,R4=50k。
(1)测量输出Uy的阶跃响应,求出δ%和ts 。
(2)取R4=10k,其余参数同上。
重复步骤(1)。
2.第二类系统中频段斜率为一20dB/10倍频的长度h=w3/w2与系统性能的关系。
采用图A5.4的实验线路,取Rl=10k,Cl=1uF,R2=50k,Rd=20k,R3=∞(即开路,相当于wl=0,即暂不考虑w1的影响,以突出h与系统性能的关系),C2分别等于1uF,1.65uF,2uF,3.3uF四种情况,R5=20k,R6=50k,C3=0.1uF。
对于每种情况分别测量输出Uy的阶跃响应,并求出δ%和ts。
图A5.5对于C2=2uF的情况,测量闭环幅频特性峰值Mr=|M(jw)|max和谐振频率wr。
3.开环对数频率特性形状一定的情况下,开环放大倍数与系统性能的关系。
仍用图A5.4的实验线路。
取C2=2uF,R5分别等于100k,50k,20k,l0k,其余参数同实验内容2。
对于每种情况测量输出Uy的阶跃响应,并求出δ%和ts4.低频段大时间常数Tl对系统性能的影响。
采用图A5.4的实验线路。
取C2=2uF,R3分别为开路和100k两种情况,其余参数同实验内容2。
对于每种情况测量输出Uy的阶跃响应,并求出δ%和ts。
改变输入信号为三角波,观察系统稳态误差。
5.高频段小时间常数对系统性能的影响按图A5.5所示的实验线路接线。
分别让C为开路、0.33uF和1uF三种情况。
分别测量Uy的阶跃响应,求出δ%和ts 。
123U1123U2123U3R150kohm R250kohmR320kohmR520kohmC11uFC21uF C30.1uF R6100kohmR7100kohmR8100kohmR9100kohmR1050kohmABTG XSC1XFG1δ%=-3.0302V ts=302.6635m当R3=50当R4=10δ%=-4.3638V ts=119.7263mδ%=-1.9018V ts=232.7404m实验总结这次实验,我们观察了两类不同类型的开环频率特性与系统性能的关系,检验中频段的形状对系统动态性能的影响,了解了低频段的大时间常数和高频段的小时间常数对系统性能的影响。
这次实验,对开环频率特性有了进一步的了解,对以后的学习很有帮助。