高阶系统稳定性分析(1)
控制工程基础第三章

特征根: 特征方程的根,即D(s)=0的解。
时域分析有关概念----主要概念
3.系统的零点、极点和零极点分布图 Xo(s) = M(s)
闭环零点: 闭环传递函数中M(s)=0的解
Xi (s) D(s)
闭环极点: 闭环传递函数中D(s)=0的解,等价特征根 开环零极点与开环传递函数相对应
f1
稳定性分析 s
s s
n n n
系12 统的特aab征011 方程aba为-223--D -代( s ) a数b a34a 5(0 劳s n 斯a a1 as )76n 稳 1 定 性 a b判n b 121 s 据 a aan 11a a240 aa11aa00aa35
4(s 2) G(s) s2 s
稳定
临界稳定
例 单位反馈系统的开环传递函数如下,判断系统是否稳定?
G(s) s 5 (s 2)
不稳定
稳定性分析----代数(劳斯)稳定性判据
系统的特征方程为 D ( s ) a 0 s n a 1 s n 1 a n 1 s a n 0
时域分析有关概念----典型输入信号
1.阶跃(位置)信号
a,t 0 x(t) 0,t 0
a为常数,a =1时为单位 阶跃信号,记为1(t)。
2.斜坡(速度)信号
at,t 0
x(t)
0,t
0
a为常数,a =1时为单位 斜坡信号,记为t·1(t)。
时域分析有关概念----典型输入信号
3.抛物线(加速度)信号
at2,t 0 x(t) 0, t 0
控制系统的稳定性分析
m
K P lim G S H S
S 0
1 ess 0 1 K p
1 1 ess Kv K
K v lim SG S H S K
S 0
K a lim S GS H S 0
2 S 0
1 ess Ka
S 0
静态速度误差系数
ess
1 Kv
(3)
R( s )
1 s
3
RS 1 ess lim S 2 S 0 1 G S H S lim S GS H S
S 0
K a lim S 2GS H S
S 0
静态加速度误差系数
1 ess Ka
2 S 0
1 ess 0 Kv 1 1 ess Ka K
系统 类型 0 I II
误差系数
典型输入下的稳态误差
C、结论:
1、稳态误差与输入信号形式,控制系统的类型有关。
2、在相同的输入信号作用下,增加积分环节个数、 开环放大倍数K,有利于减小稳态误差。 3、但开环增益不可无限大,会影响到稳定性及瞬态 性能,使其变差。
Sn
an
an 2
an 3
an 4
1 an an2 b1 an1 an1 an3
S
S
n 1
n2
an 1
an 5
b3
b1
b2
1 an an4 b2 an1 an1 an5
1 an1 an3 c1 b2 b1 b1
1 an1 an5 c2 b3 b1 b1
第六节
一、稳定性定义
控制系统稳定性分析
829自动控制原理
华中科技大学硕士研究生入学考试《自动控制原理》考试大纲科目名称:自动控制原理(含经典控制理论、现代控制理论)代码:829第一部分考试说明一.考试性质《自动控制原理》是为我校招收控制科学与工程专业硕士研究生设置的考试科目。
它的评价标准是高等学校优秀毕业生能达到良好及以上水平,以保证被录取者具有较扎实的专业基础。
二.考试形式与试卷结构(一)答卷方式:闭卷,笔试;(二)答题时间:180分钟。
(三)题型:计算题、简答题、选择题第二部分考查要点(一)自动控制的一般概念1.自动控制和自动控制系统的基本概念,负反馈控制的原理;2.控制系统的组成与分类;3.根据实际系统的工作原理画控制系统的方块图。
(二)控制系统的数学模型1.控制系统微分方程的建立,拉氏变换求解微分方程。
2.传递函数的概念、定义和性质。
3.控制系统的结构图,结构图的等效变换。
4.控制系统的信号流图,结构图与信号流图间的关系,由梅逊公式求系统的传递函数。
(三)线性系统的时域分析1.稳定性的概念,系统稳定的充要条件,Routh稳定判据。
2.稳态性能分析(1)稳态误差的概念,根据定义求取误差传递函数,由终值定理计算稳态误差;(2)静态误差系数和动态误差系数,系统型别与静态误差系数,影响稳态误差的因素。
3.动态性能分析(1)一阶系统特征参数与动态性能指标间的关系;(2)典型二阶系统的特征参数与性能指标的关系;(3)附加闭环零极点对系统动态性能的影响;(4)主导极点的概念,用此概念分析高阶系统。
(四)线性系统的根轨迹法1.根轨迹的概念,根轨迹方程,幅值条件和相角条件。
2.绘制根轨迹的基本规则。
3.0o根轨迹。
非最小相位系统的根轨迹及正反馈系统的根轨迹的画法。
4. 等效开环传递函数的概念,参数根轨迹。
5. 用根轨迹分析系统的性能。
(五)线性系统的频域分析1. 频率特性的定义,幅频特性与相频特性。
2. 用频率特性的概念分析系统的稳态响应。
3. 频率特性的几何表示方法。
现代控制理论-09(第5章状态反馈控制器设计)

期望的闭环特征多项式
(λ − λ1 )(λ − λ 2 )(λ − λ3 ) = λ3 + b2 λ2 + b1 λ + b0
要实现极点配置,须
λ3 + (a 2 + k 2 )λ2 + (a1 + k1 )λ + a 0 + k 0 = λ3 + b2 λ2 + b1λ + b0
a 0 + k 0 = b0 a1 + k1 = b1 a 2 + k 2 = b2
− 设计一个状态反馈控制器,使得闭环极点是-2, 1 ± j
解
确定能控标准型实现
1 0⎤ ⎡0 ⎡0 ⎤ x = ⎢0 0 1⎥ x + ⎢0⎥u ⎢ ⎥ ⎢ ⎥ ⎢0 − 2 − 3⎥ ⎢1⎥ ⎣ ⎦ ⎣ ⎦ y = [10 0 0]x
状态反馈控制器 u = − Kx ,K = [k1 k 2 k3 ] 闭环多项式:det[λI − ( A − BK )] = λ3 + (3 + k 3 )λ2 + (2 + k 2 )λ + k1 期望多项式: (λ + 2)(λ + 1 − j)(λ + 1 + j) = λ3 + 4λ2 + 6λ + 4
问题:对一般状态空间模型,如何解极点配置问题? 思路:考虑能控状态空间模型 将能控状态空间模型等价地转化为能控标准型 如何从能控标准型模型的解导出一般模型的极 点配置控制器。
系统模型
x = Ax + Bu
~ TAT −1 = A, ~ TB = B
0 ⎤ 0 ⎥ ⎥ ⎥, ⎥ 1 ⎥ − an−1 ⎥ ⎦ ⎡0 ⎤ ⎢0 ⎥ ~ ⎢ ⎥ B=⎢ ⎥ ⎢ ⎥ ⎢0 ⎥ ⎢1⎥ ⎣ ⎦
自动控制原理第四章-1-劳斯稳定性判据
04
劳斯稳定性判据的优缺点
优点
简单易行
劳斯稳定性判据是一种直接的方法,用于确定系统的稳定 性。它不需要求解系统的极点,只需要检查劳斯表格的第 一列。
普遍适用性
劳斯稳定性判据适用于所有线性时不变系统,无论系统是 单输入单输出(SISO)还是多输入多输出(MIMO)。
数学基础
劳斯稳定性判据基于数学中的因式分解和不等式性质,具 有坚实的数学基础。
劳斯稳定性判据的局限性在于它只能判断系统 的稳定性,无法给出系统动态性能的评估和优 化。
对自动控制原理的展望
随着科技的发展,自动控制原理的应用领域不断扩大,涉及到工业、交通、医疗、 农业等多个领域。
未来,自动控制原理将与人工智能、机器学习等先进技术相结合,实现更加智能化、 自适应的控制方案。
自动控制原理的理论体系也将不断完善和发展,以适应不断变化的应用需求和技术 环境。
2
在航空航天领域,为了确保飞行器的安全和稳定, 需要利用劳斯稳定性判据对飞行控制系统进行稳 定性分析和设计。
3
在化工领域,为了确保生产过程的稳定和安全, 需要利用劳斯稳定性判据对工业控制系统进行稳 定性分析和设计。
02
劳斯稳定性判据的基本原理
线性系统的稳定性
线性系统
01
在自动控制原理中,线性系统是指系统的数学模型可以表示为
缺点
01
对初始条件的敏感性
劳斯稳定性判据对系统的初始条件非常敏感。即使系统在大部分时间内
是稳定的,如果初始条件设置不正确,可能会导致错误的稳定性判断。
02
数值稳定性问题
在计算劳斯表格时,可能会遇到数值稳定性的问题,例如数值溢出或数
值不精确。这可能会影响判据的准确性。
自动控制原理实验(1)
实验一 典型环节的电路模拟一、实验目的1.熟悉THKKL-5型 控制理论·计算机控制技术实验箱及“THKKL-5”软件的使用; 2.熟悉各典型环节的阶跃响应特性及其电路模拟;3.测量各典型环节的阶跃响应曲线,并了解参数变化对其动态特性的影响。
二、实验设备1.THKKL-5型 控制理论·计算机控制技术实验箱;2.PC 机一台(含“THKKL-5”软件)、USB 数据采集卡、37针通信线1根、16芯数据排线、USB 接口线。
三、实验内容1.设计并组建各典型环节的模拟电路;2.测量各典型环节的阶跃响应,并研究参数变化对其输出响应的影响。
四、实验原理自控系统是由比例、积分、微分、惯性等环节按一定的关系组建而成。
熟悉这些典型环节的结构及其对阶跃输入的响应,将对系统的设计和分析十分有益。
本实验中的典型环节都是以运放为核心元件构成,其原理框图 如图1-1所示。
图中Z 1和Z 2表示由R 、C 构成的复数阻抗。
1.比例(P )环节比例环节的特点是输出不失真、不延迟、成比例地复现输出信号的变化。
图1-1 它的传递函数与方框图分别为:KS U S U S G i O ==)()()(当U i (S)输入端输入一个单位阶跃信号,且比例系数为K 时的响应曲线如图1-2所示。
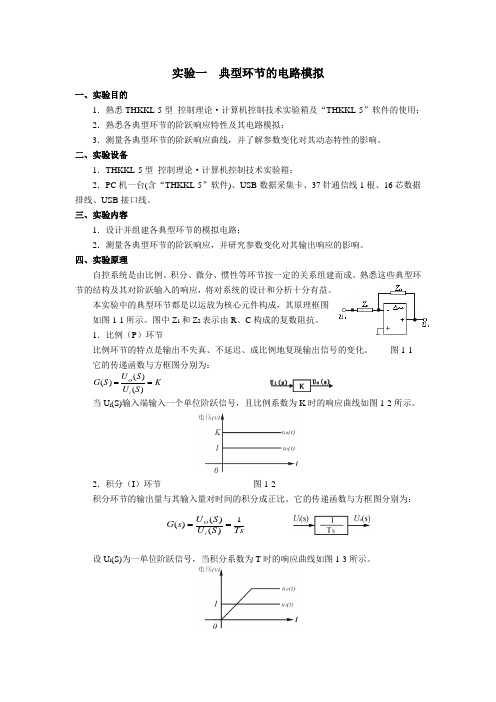
2.积分(I )环节 图1-2积分环节的输出量与其输入量对时间的积分成正比。
它的传递函数与方框图分别为:设U i (S)为一单位阶跃信号,当积分系数为T 时的响应曲线如图1-3所示。
TsS U S U s G i O 1)()()(==图1-33.比例积分(PI)环节比例积分环节的传递函数与方框图分别为:)11(11)()()(21211212CS R R R CS R R R CS R CS R S U S U s G i O +=+=+==其中T=R 2C ,K=R 2/R 1设U i (S)为一单位阶跃信号,图1-4示出了比例系数(K)为1、积分系数为T 时的PI 输出响应曲线。
自动控制原理实验(1)
实验一 典型环节的电路模拟一、实验目的1.熟悉THKKL-5型 控制理论·计算机控制技术实验箱及“THKKL-5”软件的使用; 2.熟悉各典型环节的阶跃响应特性及其电路模拟;3.测量各典型环节的阶跃响应曲线,并了解参数变化对其动态特性的影响。
二、实验设备1.THKKL-5型 控制理论·计算机控制技术实验箱;2.PC 机一台(含“THKKL-5”软件)、USB 数据采集卡、37针通信线1根、16芯数据排线、USB 接口线。
三、实验内容1.设计并组建各典型环节的模拟电路;2.测量各典型环节的阶跃响应,并研究参数变化对其输出响应的影响。
四、实验原理自控系统是由比例、积分、微分、惯性等环节按一定的关系组建而成。
熟悉这些典型环节的结构及其对阶跃输入的响应,将对系统的设计和分析十分有益。
本实验中的典型环节都是以运放为核心元件构成,其原理框图 如图1-1所示。
图中Z 1和Z 2表示由R 、C 构成的复数阻抗。
1.比例(P )环节比例环节的特点是输出不失真、不延迟、成比例地复现输出信号的变化。
图1-1 它的传递函数与方框图分别为:KS U S U S G i O ==)()()(当U i (S)输入端输入一个单位阶跃信号,且比例系数为K 时的响应曲线如图1-2所示。
2.积分(I )环节 图1-2积分环节的输出量与其输入量对时间的积分成正比。
它的传递函数与方框图分别为:设U i (S)为一单位阶跃信号,当积分系数为T 时的响应曲线如图1-3所示。
TsS U S Us G i O1)()()(==图1-33.比例积分(PI)环节比例积分环节的传递函数与方框图分别为:)11(11)()()(21211212CSR R R CSR R R CSR CS R S U S U s G i O +=+=+==其中T=R 2C ,K=R 2/R 1设U i (S)为一单位阶跃信号,图1-4示出了比例系数(K)为1、积分系数为T 时的PI 输出响应曲线。
自动控制原理-第6章新系统稳定性分析

第6章控制系统的稳定性系统能在实际中应用的必要条件是系统要稳定。
分析稳定性是经典控制理论的重要组成部分。
经典控制理论对于判定一个线性系统是否稳定提供了多种方法。
本章主要介绍几种线形定常系统的稳定性判据及其使用,以及提高系统稳定性的方法。
6.1系统稳定性概念及其条件稳定是控制系统完成期望工作任务的前提。
系统在实际工作中,会受到外部干扰作用和内部某些因素变动影响,偏离原来的平衡工作状态;在干扰或变动消失后,系统能否恢复到原来的平衡工作状 态一稳定性,这是我们最为关心的问题。
稳定性是控制系统的重要性能,对其进行分析并给出保证系 统稳定的条件,是自动控制理论的基本任务之一。
6.1.1稳定性定义控制系统稳定性定义为:如果一个系统受到扰动,偏离了原来的平衡状态,而当扰动取消后,经过充分长的时间,这个系统又能够以一定的精度逐渐恢复到原来的状态,则称系统是稳定的。
否 贝叽称这个系统是不稳定的。
由此可见,稳定性是系统的一种内在固有特性,这种特性只取决于系 统的结构和参数。
例如,图6-1 (a )所示是一个悬挂的单摆示意图。
其垂直位置 M 是原始平衡位置。
设在外界干扰作用下,摆偏离了原始平衡位置M 到达新平衡位置 b 或c 。
当外力去掉后,显然摆在重力作用下,将围绕点M 反复振荡,经过一定时间,当摆因受空气阻碍使其能量耗尽后,摆又回到原始平衡位置 M 上。
像这样的平衡点 M 就称为稳定的平衡点。
对于一个倒摆,图6-1 ( b )所示,摆的支撑点在下方。
垂直位置d 是一个平衡位置,若外力 f 使其偏离垂直位置平衡点 d ,即使外力消失,无论经过 多长时间,摆也不会回到原来平衡点d 上来。
对于这样的平衡点 d ,称为不稳定平衡点。
再如图6-2所示的小球,小球处在 a 点时,是稳定平衡点。
因为作用于小球上的有限干扰力消 失后,小球总能回到a 点。
而小球处于b 、c 点时为不稳定平衡位置, 因为只要有干扰力作用于小球, 小球便不再回到点 b 或c 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在零初始状态下,对上式两边进行拉氏变换,即
(n m)
(an s n an 1s n 1 a1s a0 )C ( s) (bm s m bm1s m1 bs b0 ) R( s)
得高阶系统的闭环传递函数为
C (s) bm s m bm1s m1 b1s b0 Gc (s) n , nm n 1 R( s ) s an1s a1s a0
① 高阶系统的单位阶跃响应,是由稳态和暂态分 量组成,稳态分量决定系统的稳态精度, ② 高阶系统的响应由许多分量组成,它们与系统 的零点、极点的分布有关。各分量的动态变化过程 又与分量的极点到虚轴的距离,以及极点附近有无 零点有关。距虚轴越近,而且其附近又无零点的极 点,称其为主导极点(Leading Poles),它对应的暂 态分量对整个响应的影响最大,而其他极点对应的 分量对整个响应的影响就小。
(n m)
自动控制原理
得高阶系统的闭环传递函数为
pi是互不相等的实数根,则系统单 位阶跃响应的拉氏变换式为
自动控制原理
若n阶高阶系统有r对共轭复数极点,则有q (q=n-2r)个实数极点,此时
可得系统的单位阶跃响应为 C(s)=φ(s)R(s) 将上式进行拉氏反变换,并令ωk=1/Tk,得
自动控制原理
自动控制原理
由高阶系统的传递函数,可方便地知道系统的零点和 极点分布,根据系统主导极点的作用,便可对高阶系统进行
(1)对高阶系统的零点和极点经过主导极点处理,使 系统保留1~3个主导极点,忽略非主导极点。将高阶系统近 似处理成为一阶、二阶或三阶系统,将一阶、二阶系统的时 (2)通常认为,主导极点离虚轴的距离与非主导极点 离虚轴的距离之比小于1/5,且附近不存在零点。若极点与 零点的距离与它们本身的模之比小于1/10,则称这对零点与 极点为偶极子。与附近的零点形成偶极子的极点,对系统响 应的影响可忽略不计。 自动控制原理
第四节 高阶系统的时域分析
用高阶微分方程来描述的系统称为高阶系统。严 格地说,工厂中实际使用的控制系统都是高阶系统。 对高阶系统的时域分析是比较困难的,因此,在遇 到三阶或三阶以上高阶系统的分析时,仅考虑主要 因素,忽略次要因素,从而使高阶系统的分析变得 简化。上述设想,在一定的条件下是允许的、可行的。
自动控制原理
一、闭环系统主导极点 设高阶系统的微分方程为
设高阶系统的微分方程为
an c ( n ) (t ) a n1c ( n 1) (t ) a1c (1) (t ) a0 c(t ) bm r ( m) (t ) bm1r ( m1) (t ) b1r (1) (t ) b0 r (t )