第5章 搜索法
第五章 文献检索
本章小结
1. 概念:教育科学文献的概念,顺查法,逆查法, 引文查找法
2. 文献检索在教育科学研究中的作用 3. 教育科学文献的种类 4. 教育科学文献的主要分布 5. 文献检索的原则 6. 文献检索的步骤 7. 文献检索的方法 8. 文献阅读的方法
论文
近期出版物
以前出版物
原始论文
论文评述
具体一本书的阅读方法
书名和目录
简介、序言和后记
书中感兴趣的章节
书中的观点、学术水平以及 对自己课题的适用程度
(二)文献阅读的方法
• 1.浏览 • 2.泛读 • 3.精读 (1)字面理解 (2)解释 (3)批判性阅读 (4)获得创造性思想----最高水平的理解, • 4.选读 • 5.速读。
2.此法多用于研究范围较广泛、项目较复杂, 所需文献较系统全面的研究课题以及学术 文献的普查。
• (二)逆查法(倒查法)
1.逆查法是由近及远,由新到旧的顺序查找。 2.关注最近一个时期的较新论文、专著,不太关注
历史渊源和全面系统。
(三)引文查找法(跟踪法)
1.是以已掌握的文献中所列的引用文献、附录的参 考文献作为线索,查找有关主题的文献。
使之系统化条理化的检索性文献。一般包括 书目,索引、提要和文献等。
具有报告性、汇编性和简明性的特点。
• 3.三级文献 三级文献指在二级文件的基础上,又将一
级文献内容分类整理的成果。一般指专题综 述评述、进展报告、数据手册、年度百科大 全以及专题研究报告等。
三级文献,具有综合性、浓缩性和参考性 的特点
3. 一般来说,研究人员查阅的文献应以正式 出版的文献为主。
(二)按文献资料的加工程度分
• 1.一级文献 一级文献指原始文献,包括专著、论文、
谢宁:第五章 - 部件搜索技术

式中,中值高(h),为阶段1出现的低值组件的中值,t为相应于一个0.95或95%置信度 值。d/d2是sigma(σ)估计值。(d-在检测显著的可重现差值数时已予以定义,它是 高值低值组件的不可重现性相加在一起时的平均范围)。
部件搜索技术步骤
为确定这种不分改变的程度是重要的还是不重要的,必须计算出判断极限。任何交换过程,如果引
起BOB或WOW有一点处于判断极限之外,就意味着部件A肯定是重要的,与其在一起的还有以上其他
有待发现的部件。
08对于第7步所产生的3个结果中的每一个,将原来自BOB部 • 保证原始的BOB或WOW的Y值被复原。如果没有得到这样的结果,那么
在图5-2B中,当变量A由(-)变为(+)时,Y由5变为15个单位,和以前B(-)时 一样。但是,当B由(-)变为(+)时,如果A是(-),Y仅仅增加至8,如果A是(+), 则B对Y的影响是20个单位。此时,AB的交互影响不为零。图中可见:两条线不平行, 交互影响大,不平行度就越大。
交互影响:当与主影响没有隔离时,使得分析因方法产生完全错误的结果。
在计时器案例中:中值(高)=-37°,中值(低)=-5° d=-6°。 所以,判断极限(高)=-37°±2.776 *(-6/1.81)
=-46.2°和27.8° 判断极限(低)=-5°±2.776*(-6/1.81)
=+4.2°和-14.2° 它显示部件A、B、C、E、F和H都还处于高或低极限内,因而他们不重要。 但部件D、G超出了高水平的判断极限,但不是低判断极限,所以D、G是重要的。
=-6° 所以D/d=-32°:-6°=5.33:1,超过1.25. 结论 (1)、(2)的显著性是吻合的,因此阶段1是成功的。意味着红X和粉红X是在部件中,而不在 组装技术里。
第5章高级搜索

2.最优化问题的分类 最优化问题根据系统的结构性能和完成的任务各不相 同,通常可以按下述情况进行分类: (1) 单变量函数与多变量函数最优化问题 (2) 无约束与有约束最优化问题 (3) 确定性和随机性最优化问题 (4) 线性和非线性最优化问题 (5) 静态和动态最优化问题
3.计算复杂性问题 定义5-2(算法的计算复杂性) 给定任一问题S,可假设已找 到描述该问题例子的一个合理编码策略e,则对S的任一例子I, 称其依编码策略e所得的相应字符串描述中所含字符的个数为 其输入长度,并将该输入长度的具体数值作为例子I 的大小的 正式度量。 定义5-3 对某一问题S和任一可能的输入长度n,称用所给算法 求解S的所有大小为n的例子所需的时间的最大值为该算法在 输入长度为n时的复杂性。 复杂性函数O(*)可以将函数划分为不同的类,因此对如此定 义的同一类型的不同函数往往不加区分。对于定义于正整数 集上的两个正实值函数f(n)与g(n),若存在两个常数c > c`> 0, 使得当n充分大时有c`g(n)≤f(n)≤cg(n),则记f(n) =O(g(n))。
5.2.2 禁忌搜索的算法流程
(1) 给定算法参数,随机产生初始解x=x0,置禁忌表为空。 (2) 判断算法终止条件是否满足?若是,则结束算法并输出优化结果; 否则,继续以下步骤。 (3) 利用当前解x的邻域函数产生其所有(或若干)邻域解,计算领域内 各解的评价值,并从中确定若干候选解。 (4) 对候选解判断特赦准则是否满足?若成立,则用满足特赦准则的最 佳状态y替代x成为新的当前解,即x=y,并用与y对应的禁忌对象替换最 早进入禁忌表的禁忌对象,同时用y替换最优解,然后转步骤(2);否则, 继续以下步骤。 (5) 判断候选解对应的各对象的禁忌属性,选择候选解集中非禁忌对象 对应的最佳状态为新的当前解,同时用与之对应的禁忌对象替换最早进 入禁忌表的禁忌对象元素。转步骤(2)。
第五章 状态空间搜

状态节点
表 5.1 OPEN表结构 编号 状态节点 父节点
表 5.2 CLOSED表结构
5
第五章 状态空间搜索策略
5.2.1 状态空间图的搜索策略
状态空间的搜索算法如下: 算法5.1 状态空间图的一般搜索算法 (1)建立一个只有初始节点的搜索图G,把放入到OPEN表中。 (2)建立CLOSED表,且置为空表。 (3)判断OPEN表是否为空表,若为空,则问题无解,退出。 (4)若OPEN表非空,选择OPEN表中的第一个节点, 把它从OPEN表移出, 并放入CLOSED表中,将此节点记为n。 (5)考察节点n是否为目标节点,若是,则问题有解,并成功退出。问题的 解即可从图G中沿着指针从n到的这条路径得到。 (6)扩展节点n生成一组不是n的祖先的后继节点,并将它们记为集合M,将 M中的这些节点作为n的后继节点加入图G中。 (7)对那些未曾在G中出现过的(即未曾在OPEN表上或CLOSED表上出现 过的)M中的节点,设置一个指向父节点(即节点n)的指针,并把这些节点加入 OPEN表中;对于已在G中出现过的M中的那些节点,确定是否需要修改指向父节 点(n节点)的指针;对于那些先前已在G中出现并且已在CLOSED表中的那些M 中的节点,确定是否需要修改通向它们的后继节点的指针。 (8)按某一任意方式或按某种策略安排OPEN表中节点的顺序。 (9)转第(3)步 6 这一搜索过程的流程图如图5.1所示。
15
第五章 状态空间搜索策略
5.2.3 深度优先搜索
算法5.3 状态空间图的深度优先搜索算法 (1)把初始节点放入OPEN表 (2)如果OPEN表为空,则问题无解,退出; (3)从OPEN表中将第一个节点(节点n)移出,放入已扩展节点表 CLOSED中; (4)考察节点n是否为目标节点,若是,则找到问题的解,用回溯法求解的 路径,退出; (5)若节点n不可扩展,则转第(2)步; (6)扩展节点n,将其后继节点放到OPEN表的前端,并为其设置指向节点n 的指针,然后转第(2)步。 深度优先搜索与宽度优先搜索的区别在于:在对节点n进行扩展时,其后继 节点在OPEN表中的存放位置。宽度优先搜索是将后继节点放入OPEN表的末端, 而深度优先搜索则是将后继节点放入OPEN表的前端。 图5.7是深度优先搜索算法的流程图。
第5章 搜索与回溯算法(C 版)

【参考程序】
#include<cstdio> #include<iostream> #include<cstdlib> using namespace std; int a[10001]={1},n,total; int search(int,int); int print(int); int main() {
int print();
//输出方案
int main() {
cout<<"input n,r:"; cin>>n>>r; search(1); cout<<"number="<<num<<endl; }
//输出方案总数
int search(int k) {
int i; for (i=1;i<=n;i++) if (!b[i])
(r<n),试列出所有的排列。
#include<cstdio>
#include<iostream>
#include<iomanip>
using namespace std;
int num=0,a[10001]={0},n,r;
bool b[10001]={0};
int search(int);
//回溯过程
{
for (int j=0;j<=3;j++)
//往4个方向跳
if (a[i-1][1]+x[j]>=0&&a[i-1][1]+x[j]<=4
&&a[i-1][2]+y[j]>=0&&a[i-1][2]+y[j]<=8)//判断马不越界
人工智能教程习题及答案第5章习题参考解答
第五章搜索策略习题参考解答5.1 练习题5.1 什么是搜索?有哪两大类不同的搜索方法?两者的区别是什么?5.2 用状态空间法表示问题时,什么是问题的解?求解过程的本质是什么?什么是最优解?最优解唯一吗?5.3 请写出状态空间图的一般搜索过程。
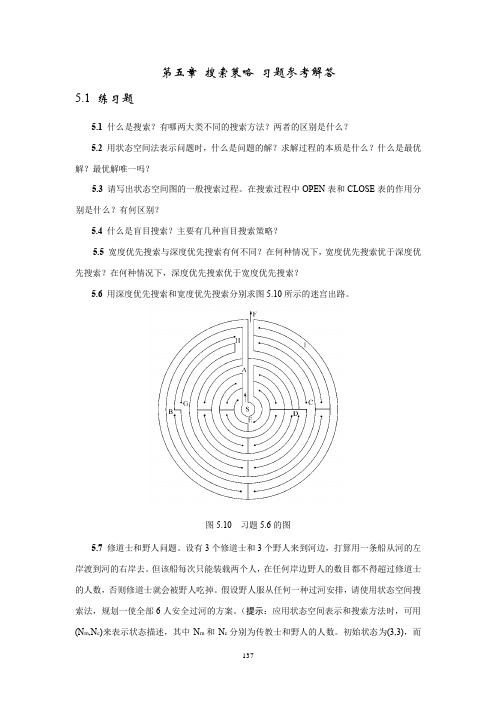
在搜索过程中OPEN表和CLOSE表的作用分别是什么?有何区别?5.4 什么是盲目搜索?主要有几种盲目搜索策略?5.5 宽度优先搜索与深度优先搜索有何不同?在何种情况下,宽度优先搜索优于深度优先搜索?在何种情况下,深度优先搜索优于宽度优先搜索?5.6 用深度优先搜索和宽度优先搜索分别求图5.10所示的迷宫出路。
图5.10 习题5.6的图5.7 修道士和野人问题。
设有3个修道士和3个野人来到河边,打算用一条船从河的左岸渡到河的右岸去。
但该船每次只能装载两个人,在任何岸边野人的数目都不得超过修道士的人数,否则修道士就会被野人吃掉。
假设野人服从任何一种过河安排,请使用状态空间搜索法,规划一使全部6人安全过河的方案。
(提示:应用状态空间表示和搜索方法时,可用(N m,N c)来表示状态描述,其中N m和N c分别为传教士和野人的人数。
初始状态为(3,3),而可能的中间状态为(0,1),(0,2),(0,3), (1,1),(2,1),(2,2),(3,0),(3,1),(3,2)等。
)5.8 用状态空间搜索法求解农夫、狐狸、鸡、小米问题。
农夫、狐狸、鸡、小米都在一条河的左岸,现在要把它们全部送到右岸去。
农夫有一条船,过河时,除农夫外,船上至多能载狐狸、鸡和小米中的一样。
狐狸要吃鸡,鸡要吃小米,除非农夫在那里。
试规划出一个确保全部安全的过河计划。
(提示:a.用四元组(农夫,狐狸,鸡,米)表示状态,其中每个元素都可为0或1,0表示在左岸,1表示在右岸;b.把每次过河的一种安排作为一个算符,每次过河都必须有农夫,因为只有他可以划船。
)5.9 设有三个大小不等的圆盘A 、B 、C 套在一根轴上,每个圆盘上都标有数字1、2、3、4,并且每个圆盘都可以独立地绕轴做逆时针转动,每次转动90°,初始状态S 0和目标状态S g 如图5.11所示,用宽度优先搜索法和深度优先搜索法求从S 0到S g 的路径。
文献检索第5章:图书类文献的检索与利用

2)中华数字书苑
中华数字书苑是方正阿帕比公司推出的华文数字资源服务平台。收录了 建国以来大部分的图书、报纸、年鉴、工具书等资源。为读者提供在线 阅读、全文检索、离线借阅、移动阅读、下载等服务。 内容包括: ●110万电子书全文检索、在线预览;约60万种电子书全文下载阅读, 在线阅读、下载借阅服务。 ●450多种报纸信息检索、原版阅读,覆盖全国正式发行报纸的30%, 覆盖了100%的报业集团。 ●174种工具书,覆盖了各大类大部分的重要工具书。 ●1431卷年鉴,覆盖绝大多数地方综合年鉴及全国各大行业年鉴,覆 盖了统计出版社出版的所有统计年鉴。
34
双 击 这 里 进 入
35
图书导航
36
37
38
其他参考链接
39
其他词条
40
相关论文等变化 通配符* 代表任意个字的变化
42
分组筛选检索结果
43
6)中国经济社会发展统计数据库
完整收录了建国以来我国已出版发行的936种权威统计资料 。其中,仍在连续出版的统计年鉴资料有150多种,内容覆 盖国民经济核算、固定资产投资、人口与人力资源、人民生 活与物价、各类企事业单位、财政金融、自然资源、能源与 环境、政法与公共管理、农民农业和农村、工业、建筑房产 、交通邮电信息产业、国内贸易与对外经济、旅游餐饮、教 育科技、文化体育、医药卫生等行业领域,是我国最大的官 方统计资料集合总库。截至目前,全库共有中央、各省市官 方统计年鉴6515册,数据图表条目195万余条。
4
图书在人类发展史上和我们的生活中起着十 分重要的作用
高尔基曾经说过:图书是人类进步的阶梯 莎士比亚则认为:图书是全世界的营养品
图书为我们提供了丰富的知识和精神食粮
第五章 启发式搜索课件
[S3,S2,S1,S0]
。。 。。 。。。 。。。
5.3.3 深度优先搜索策略
深度优先搜索:首先扩展最新产生的节点,深度相等的节 点可以任意排列的搜索方法。(用堆栈的数据结构)
特点:搜索沿着状态空间的某单一路径沿着起始点向下进
行下去,仅当搜索到达一个没有后裔的状态时,才选择另 S0 一条替代路径。 1 10
5.3
盲目的图搜索策略
5.4 启发式图搜索策略 5.5 与/或图搜索策略
5.3 盲目的图搜索策略
5.3.1 回溯策略
5.3.2 宽度优先搜索策略
5.3.3 深度优先搜索策略
5.3.1 回溯策略
带回溯策略的搜索:(走不通就回头) 从初始状态出发,不停地、试探性地寻找路径, 直到它到达目的或“不可解结点”,即“死胡同” 为止。 若它遇到不可解结点就回溯到路径中最近的父结 点上,查看该结点是否还有其他的子结点未被扩展 。 若有,则沿这些子结点继续搜索;如果找到目标,
(3) NSS(no solvable states)表:不可解状态集,列出 了找不到解题路径的状态。如果在搜索中扩展出的 状态是它的元素,则可立即将之排除,不必沿该状 态继续搜索。
1 A B 2 5.3.1 回溯策略
8 C 11 D
E 3 回溯搜索示意图的回溯轨迹: 10 H 6 F 9 G 初值:PS=[A]; NPS=[A]; NSS=[ ]; CS=A。 J 5 7 K
5.1.2 搜索策略
3.人工智能的主要搜索策略: 求最佳解的搜索策略: 大英博物馆法(British museum); 宽度优先法(Breadth-first search); 分支界定法(Branch and Bound); 最佳图搜索法(A*); 动态规划法(Dynamic Programing);
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Q
Q 1 2 3 4 5 6 7 8
定义问题的解空间 解的形式:(x1, x2, … , xn) xi的取值范围:xi=1,2, … ,n 组织解空间 满n叉树,树的深度为n 搜索解空间 约束条件:不同列且不处于同一正、反对 角线上:|i-j||xi-xj| 限界条件:(×) 搜索过程(以4皇后问题为例)
• 示列
– 给定一个有向带权图G=(V,E),权非负,如图5-1 所示。找出顶点1→5的最短路径及其长度。
1 2 3 1 4 2 1 5 1 4
3
1
图5-1 有向带权图
• 问题分析
– 该问题所有可能的路径只有 三条,分别是:
• 1→2→4→5 • 1→3→4→5 • 1→4→5
– 采用穷举搜索的方法逐一检 查这三条路径的长度。 – 最短路径为1→2→4→5,其 长度为3。
• 从根开始,以深度优先搜索的方式进行搜索。 • 根结点是活结点并且是当前的扩展结点。在搜索的 过程中,当前的扩展结点向纵深方向移向一个新结 点,判断该新结点是否满足隐约束。 • 如果满足,则新结点成为活结点,并且成为当前的 扩展结点,继续深一层的搜索; • 如果不满足,则换该新结点的兄弟结点(扩展结点 的其它分支)继续搜索; • 如果新结点没有兄弟结点,或其兄弟结点已全部搜 索完毕,则扩展结点成为死结点,搜索回溯到其父 结点处继续进行。 • 搜索过程直到找到问题的解或根结点变成死结点为 止。
Байду номын сангаас
示例1:0-1 背包问题
• 问题描述
– 给定n种物品和一背包。物品i的重量是wi,其价值为vi, 背包的容量为W。一个物品要么全部装入背包,要么 全部不装入背包,不允许部分装入。装入背包的物品 的总重量不超过背包的容量。问应如何选择装入背包 的物品,使得装入背包中的物品总价值最大?
• 定义问题的解空间
子集树
• 当所给的问题是从n个元素组成的集合S中 找出满足某种性质的一个子集时,相应的 解空间树称为子集树。 • 此类问题解的形式为n元组(x1,x2,…,xn), 分量xi(i=1,2,…,n)表示第i个元素是否在要找 的子集中。 • xi的取值为0或1,xi=0表示第i个元素不在要 找的子集中;xi=1表示第i个元素在要找的 子集中。
回溯法
回溯法有“通用的解题法”之称。用 它可以系统地搜索一个问题的所有解或任 一解。
回溯法
• 有许多问题,当需要找出它的解集或者要求回答什 么解是满足某些约束条件的最佳解时,往往要使用 回溯法。 • 回溯法的基本做法是搜索,或是一种组织得井井有 条的,能避免不必要搜索的穷举式搜索法。这种方 法适用于解一些组合数相当大的问题。 • 回溯法在问题的解空间树中,按深度优先策略,从 根结点出发搜索解空间树。算法搜索至解空间树的 任意一点时,先判断该结点是否包含问题的解。如 果肯定不包含,则跳过对该结点为根的子树的搜索, 逐层向其祖先结点回溯;否则,进入该子树,继续 按深度优先策略搜索。
A
x1=1 x1=2 x1=3
x1=4
B
Q
x2=3 x2=4
F
x2=4 x2=1
J
x2=1
N
x2=2
Q Q Q
C
x3=2
D E
G
x3=1
K
x3=4
O
x3=3
Q P
H
x4=3
L
x4=2
I
M
4皇后问题的搜索树
n后问题
•解向量:(x1, x2, … , xn) •显约束:xi=1,2, … ,n •隐约束: 1)不同列:xixj 2)不处于同一正、反对角线:|i-j||xi-xj|
思考:进一步改进?
定义问题的解空间 解的形式:(x1, x2, … , xn) xi的取值范围:xi∈S-{x1, x2, … , xi-1} 思考:该解空间比改进前少了多少可能的 解? 组织解空间 排列树,树的深度为n 搜索解空间 约束条件:不处于同一正、反对角线:|ij||xi-xj| 限界条件:(×)
回溯法的解题步骤
(1)针对所给问题,定义问题的解空间; (2)确定易于搜索的解空间结构; (3)以深度优先方式搜索解空间,并在搜 索过程中用剪枝函数避免无效搜索。
常用剪枝函数: 用约束函数在扩展结点处剪去不满足约束的子树; 用限界函数剪去得不到最优解的子树。
回溯法的基本思想
确定了解空间的组织结构后,回溯法就从开始结点(根) 出发,以深度优先的方式搜索整个解空间。这个开始结点就成为 一个活结点,同时也成为当前的扩展结点。在当前的扩展结点处, 搜索向纵深方向移至一个新结点。这个新结点就成为了一个新的 活结点,并成为当前扩展结点。如果在当前的扩展结点处不能再 向纵深方向移动,则当前的扩展结点就成为死结点。此时,应往 回移动(回溯)至最近的一个活结点处,并使这个活结点成为当 前的扩展结点。回溯法即以这种工作方式递归地在解空间中搜索, 直至找到所要求的解或解空间中已无活结点时为止。 用回溯法解题的一个显著特征是在搜索过程中动态产生问题的 解空间。在任何时刻,算法只保存从根结点到当前扩展结点的 路径。如果解空间树中从根结点到叶结点的最长路径的长度为 h(n),则回溯法所需的计算空间通常为O(h(n))。而显式地存储 整个解空间则需要O(2h(n))或O(h(n)!)内存空间。
递归回溯
回溯法对解空间作深度优先搜索,因此,在一般情况下用递归方法实 现回溯法。
void backtrack (int t) { if (t>n) output(x); //已到叶子结点,输出结果 else for (int i=s(n,t);i<=e(n,t);i++) //检查扩展结点的每个分支 { x[t]=d(i); if (constraint(t)&&bound(t)) backtrack(t+1);} //如果满足,进入t+1层继续搜索 } s(n,t) ,e(n,t) :表示当前扩展结点处未搜索过的子树的起始 编号和终止编号。 d(i):表示在当前扩展结点处x[t]的第i个可选值。 constraint(t):约束函数,bound(t):限界函数
迭代回溯(非递归算法)
采用树的非递归深度优先遍历算法,可将回溯法表示 为一个非递归迭代过程。 void NBacktrack () { int t=1; while (t>0) { if (s(n,t)<=e(n,t)) for (int i=s(n,t);i<=e(n,t);i++) { x[t]=d(i); if (constraint(t)&&bound(t)) { if (t>n) output(x); else t++;} //进入更深层搜索 } else t--; //回溯到上一层的活结点 } }
回溯法
• 回溯法是在仅给出初始结点、目标结点及 产生子结点的条件(一般由问题题意隐含 给出)的情况下,构造一个图(隐式图), 然后按照深度优先搜索的思想,在有关条 件的约束下扩展到目标结点,从而找出问 题的解。 • 通俗地讲:回溯法是一种“能进则进,进 不了则换,换不了则退”的基本搜索方法
回溯法的基本思想
5.2深度优先搜索
• 思想(给定图G=(V,E))
– 初始时,所有顶点均未被访问过,任选一个顶点v作为源 点。该方法先访问源点v,并将其标记为已访问过;然后 从v出发,选择v的一个邻接点(子结点)w,如果w已访 问过,则选择v的另外一个邻接点;如果w未被访问过,则 标记w为已访问过,并以w为新的出发点,继续进行深度 优先搜索;如果w及其子结点均已搜索完毕,则返回到v, 再选择它的另外一个未曾访问过的邻接点继续搜索,直到 图中所有和源点有路径相通的顶点均已访问过为止;若此 时图G中仍然存在未被访问过的顶点,则另选一个尚未访 问过的顶点作为新的源点重复上述过程,直到图中所有顶 点均已访问过为止。
void backtrack (int t) { if (t>n) output(x); else for (int i=t;i<=n;i++) { swap(x[t], x[i]); if (legal(t)) backtrack(t+1); swap(x[t], x[i]); } }
子集树举例
private static boolean place (int k) { for (int j=1;j<k;j++) if ((Math.abs(k-j)==Math.abs(x[j]-x[k]))||(x[j]==x[k])) return false; return true; } private static void backtrack (int t) { if (t>n) sum++; else for (int i=1;i<=n;i++) { x[t]=i; if (place(t)) backtrack(t+1); }
回溯法的基本思想
例如:n=3的0——1 背包问题的回溯法搜索过程。 W=[16,15,15] p=[45,25,25] C=30
回溯法的基本思想
例如2:旅行售货员问题。某售货员要到若干城市去 推销商品,已知各城市之间的路程(旅费),他要 选定一条从驻地出发,经过每个城市一遍,最后回 到驻地的路线,使总的路程(总旅费)最小。
n=3时的0-1背包问题用完全二叉树表示的解空间
生成问题状态的基本方法
• 扩展结点:一个正在产生儿子的结点称为扩展结点 • 活结点:一个自身已生成但其儿子还没有全部生成的节点称 做活结点 • 死结点:一个所有儿子已经产生的结点称做死结点 • 深度优先的问题状态生成法:如果对一个扩展结点R,一旦 产生了它的一个儿子C,就把C当做新的扩展结点。在完成对 子树C(以C为根的子树)的穷尽搜索之后,将R重新变成扩 展结点,继续生成R的下一个儿子(如果存在) • 深度优先的问题状态生成法:在一个扩展结点变成死结点之 前,它一直是扩展结点 • 回溯法:为了避免生成那些不可能产生最佳解的问题状态, 要不断地利用限界函数(bounding function)来处死那些实 际上不可能产生所需解的活结点,以减少问题的计算量。 具有限界函数的深度优先生成算法称为回溯法