PLC可编程控制器多轴运动控制器-军创
UN UN UN UN 系列运动型可编程控制器应用技术手册-简易说明篇说明书

一,性能规格项目性能运算控制方式 存储程序反复扫描方式,有中断指令输入输出控制方式批处理方式(执行END 指令时),输入输出刷新指令,有脉冲捕捉功能编程语言 继电器符号方式+步进梯形图方式(也可用SFC 表示) 程序 内存 程序容量,形式内置32K 步EEPROM (不需存储器电池支持) ※含文件寄存器,注释最大8K 步顺控指令 顺控指令:27个 步进梯形图指令:2个 指令 种类 步进梯形图指令 FX1N :全部 及大部分2N 指令 型号为FX2N 基本指令 0.55-0.7µs/指令 单步梯形图应用指令 0.55~数10µs/指令 比三菱FX2N 原机快N 倍 运算 处理 速度 CPU 处理能力 0.01us/指令 32位 RISC 100MHZ 输入点数 X000~(8进制编号) 可软件设定滤波时间0-255mS 输入输出点数 输出点数 Y000~(8进制编号) 输入输出合计512点以下一般用 M0~M383 384点 保持用 EEPROM 保持M384~M1535 1152点 辅助继电器特殊用M8000~M8255 256点 初始状态用(EEPROM 保持) S0~S9 10点 状态保持用EEPROM 保持 S10~S999 990点100ms T0~T199 200点(0.1~3,276.7秒) 10ms T200~T245 46点(0.01~327.67秒) 1ms 累计形 T246~T249 4点(0.001~32.767秒) 定时器 (延时置ON ) 100ms 累计形 EEPROM 保持 T250~T255 6点(0.1~3,276.7秒)16位增模式 C0~C15 16点(0~32,767计数器) 16位增模式 EEPROM 保持C16~C199 184点(0~32,767计数器)32位高速双向 C200~C219 20点(-2,147,483,648~+2,147,483,647)计数32位增/减双向 EEPROM C220~C234 15点(-2,147,483,648~+2,147,483,647)计数计数器调整计数器C235~C255 EEPROM 16位通用 D0~D127 128点 EEPROM 保持 D128~D2047最大1920点 16位特殊用 D8000~D8255 256点 数据寄存16位变址V0~V7,Z0~Z7 16点 JAMP 、CALL P0~P127 128点 输入中断 IO □□~I5□□ 6点 指针定时中断I6□□~I8□□ 3点 嵌套 主控用N0~N7 8点常数10进制数(K ) 16位:-32,768~+32,76732位:-2,147,483,648~+2,147,483,64716进制数(H ) 16位:0~FFFF 32位:0~FFFFFFFF二,UN 系列全新运动型可编程控制器[PLC]高速输入输出说明 1,高速输入/硬件计数器输入/外部中断输入说明外部中断号 中断编号 端 口号 高速计数器 上升沿 下降沿 中断控制ON 时禁止备注X0 C235 10K C251-A 10K I001 I000 M8050 X1 C236 10K C251-B 10K I101 I100 M8051 X2 C237 200K I201 I200 M8052 X3 C238 200K I301 I300 M8053 X4 C239 10K I401 I400 M8054 X5 C240 10K I501 I500 M8055 X6 C252-A 10K X7 C252-B 10K 支持SPDHSCS HSCR 指令X10 C253-A 200K X11 C253-B 200K M8198 4倍频 X12 C254-A 200K X13C254-B 200KM8199 4倍频2,高速脉冲输出/肪宽调制输出说明高速脉冲输出端口号 对应 脉冲数 输出中 停止脉宽调制输出备注 Y0 脉冲输出1 D8140 M8147 M8145 PWM1 Y1 脉冲输出2 D8142 M8148 M8146 PWM2 Y2 脉冲输出3 D8150 M8149 M8144 PWM3 Y3脉冲输出4 D8152 M8150M8143 PWM4M8197 ON0.1mS M8197 OFF1mS总频率不超过400K , 单轴最高可200KD8145 :定位指令的基底速度 D8146 :最高速度,默认 100Khz D8148 :加减速时间,默认 100ms全部全部支持支持支持::PLSY ,PLSV ,PLSR ,PWM ,DRVI ,DRV A ,ZRN 指令 注:PLSY 运行中可改变频率注:X0+X1+X2+X3+X4+X5+X6+X7+Y0+Y1+Y2+Y3总频率不应该超过400K3,定时中断说明中断输入编号 中断周期(ms )中断禁止标志位 ON 时禁止 I 6□□ M8056 I7□□ M8057 I8□□在指针名的□□中,输入10-99的整数。
基于三菱FX5U系列PLC的工作台运动控制系统设计

基于三菱FX5U系列PLC的工作台运动控制系统设计
程院莲;周华
【期刊名称】《机电工程技术》
【年(卷),期】2017(046)004
【摘要】基于工作台运动控制系统,探讨三菱FX5U系列PLC控制伺服电机的应用设计.给出了该控制系统的构成与电路设计,着重分析了系统关键技术,对FX5U产品的应用推广以及教学研究起到借鉴作用.
【总页数】5页(P18-22)
【作者】程院莲;周华
【作者单位】广州番禺职业技术学院机电工程学院,广东广州 511483;广州番禺职业技术学院机电工程学院,广东广州 511483
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于三菱PLC码垛生产线运动控制系统设计 [J], 蔡明学;
2.三菱Q系列PLC和运动控制器在连轴压模设备上的应用 [J], 唐志文;
3.三菱Q系列PLC在平面二维运动控制装置中的应用 [J], 刘涵茜
4.基于三菱FX3U系列PLC的伺服控制系统设计 [J], 廖广益;崔静
5.基于三菱FX3U系列PLC的盾构电气控制系统设计 [J], 张潮;郭京波;陈晓阳;张海东;周庆祥;陈建忠
因版权原因,仅展示原文概要,查看原文内容请购买。
三轴联动PMC3型运动制器

ROLLON
4.2 PMC 与电脑连接说明
厦门热龙智能科技有限公司
1. PMC 是通过串口与电脑通讯和下载数据,在 PMC 的输出端有 8 针圆孔的 S 端子,脚位定义如下:
8 76
5
43
21
*接口定义=台达或信捷接口定义相同 请购买台达或者信捷通讯线而非下载 线
2. 与电脑连接方式: 2.1 PMC 专用数据线:
打开设备管理器------》找到端口
注意: 1.每个 USB 接口插入后,端口号不同。 如果打开软件显示,打开失败。请重新打 开《设备管理器》查看此端口是否正确。 否则检查 USB 线或者驱动程序。
记住此端口号 此图中为:COM3 代表此为虚拟第 3 个 串口
13 / 55
ROLLON
厦门热龙智能科技有限公司
7 / 55
ROLLON
厦门热龙智能科技有限公司
3.3 输出口接线
输出口 Y0
输出口 Y1
输出口 Y2
输
出
输出口 Y3
口
输出口 Y4
输出口 Y5 输出口 Y6 输出口 Y7
COM
+24VDC GND
※输出说明:
1.输出为 NPN 集电极开路输出,动作的时候输出低电平。 2.公共端 COM 本身控制其内部与 24V 电源负极连接。如果为增强抗干扰性,可以选择外部
DIRZ:Z 轴方向
8 / 55
PULS(脉冲+) PULS(脉冲--) DIR(方向+) DDIIRR((方方向向---))
驱动器 X
PULS(脉冲+) PULS(脉冲--) DIR(方向+) DIR(方向-)
驱动器 Y
MPC2812E运动控制器用户手册说明书
用户手册(0.4版)版权申明乐创自动化技术有限公司保留所有权利乐创自动化技术有限公司(以下简称乐创自动化公司)保留在不事先通知的情况下,修改本手册中的产品和产品规格等文件的权利。
乐创自动化公司不承担由于使用本手册或本产品不当,所造成直接的、间接的、附带的或相应产生的损失或责任。
乐创自动化公司具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或间接地复制、制造、加工、使用本产品及其相关部分。
前言感谢购买MPC2812E 运动控制器!MPC2812E 是从本公司研制的一款高性能通用控制器。
本手册介绍了关于MPC2812E 的规格、使用方法,使用前请充分理解MPC2812E 的使用功能。
安全警告注意以下警告,以免伤害操作人员及其他人员,防止机器损坏。
◆下面的“危险”和“警告”符号是按照其事故危险的程度来标出的。
◆下列符号指示哪些是禁止的,或哪些是必须遵守的。
常规安全概要请查看下列安全防范措施以避免受伤害并防止对本产品或任何与其相指示一个潜在的危险情况,如果不避免,将导致死亡或严重伤害。
危险指示一个潜在的危险情况,如果不避免,将导致轻度或中度伤害,或物质损坏。
这个符号表示禁止操作。
这个符号表示须注意的操作。
警告连接的产品造成损伤。
为避免潜在的危险,请仅按详细说明来使用本产品。
使用正确的电源线。
请使用满足国家标准的电源线。
正确地连接和断开。
先将控制卡输出连接至转接板,再将电机、驱动器连接到转接板,最后开启电源。
断开时先关闭外部电源,再断开电机、驱动器与转接板的连接,最后断开控制卡与转接板的连接。
当有可疑的故障时不要进行操作。
如果您怀疑本产品有损伤,请让有资格的服务人员进行检查。
不要在的湿的/潮湿环境下操作。
不要在爆炸性的空气中操作。
保持产品表面清洁和干燥。
防止静电损伤。
静电释放(ESD)可能会对运动控制器及其附件中的元件造成损伤。
为了防止ESD,请小心处理控制器元件,不要触摸控制器上元器件。
第十六届山东省职业院校技能大赛高职组“机器人系统集成应用技术”赛项规程
第十六届山东省职业院校技能大赛高职组“机器人系统集成应用技术”赛项规程一、赛项名称赛项名称:机器人系统集成应用技术赛项组别:高职组(教师赛)赛项归属产业:装备制造大类二、竞赛目的本赛项对接工业机器人系统集成新技术发展需求,针对高等职业院校装备制造类专业人才培养目标,融入P1C控制技术、虚拟调试技术、机器视觉技术、工业网络技术、工业机器人现场编程和离线编程技术、MES技术、人工智能技术等工业机器人系统集成技术。
通过竞赛,一方面培养老师机器人系统集成应用综合实践技能,更好的实现以赛促教、以赛促学,岗课赛融通,提高智能制造领域技术技能人才培养质量,同时检验和展示高职院校工业机器人技术等专业教学改革成果;另一方面引领和促进高职院校专业教学改革,实现校企合作、产教融合,促进产业新技术转化为竞赛设备和竞赛资源,实施“岗、课、赛、证”融通,开展课程和教学资源建设,提升职业教育影响力,激发和调动行业、企业关注和参与专业教学改革的主动性和积极性,提升高职院校复合型技术技能人才培养水平,为山东省“机器换人''培养大量的工业机器人技术应用领域高素质技术技能人才,服务山东省制造强省战略。
三、竞赛内容本赛项主要覆盖工业机器人本体制造、系统集成和生产应用类企业中的工业机器人操作编程、安装调试、系统集成和运行维护等岗位,主要考察选手的工业机器人、可编程序控制器、数控系统、机器视觉等智能装备的操作编程能力,以机器人为主要作业单元的系统集成能力,以及虚拟调试软件、MES系统的应用能力。
本赛项采用团体比赛方式,每支队2名选手在5小时内,以现场操作的方式,根据赛场提供的有关资料和赛项任务书,完成任务书要求的内容。
具体的竞赛内容和成绩占比如下:(一)机器人系统方案设计和仿真调试(40%)1系统方案设计和仿真调试(30%)(D系统方案设计。
根据竞赛任务,设计工业机器人及周边设备整体方案。
(2)系统仿真搭建.根据整体方案,在虚拟仿真系统中搭建由工业机器人、数控、工具、仓储、分拣、检测等组成的机器人集成应用系统。
基于PLCopen的数控机械控制器分析
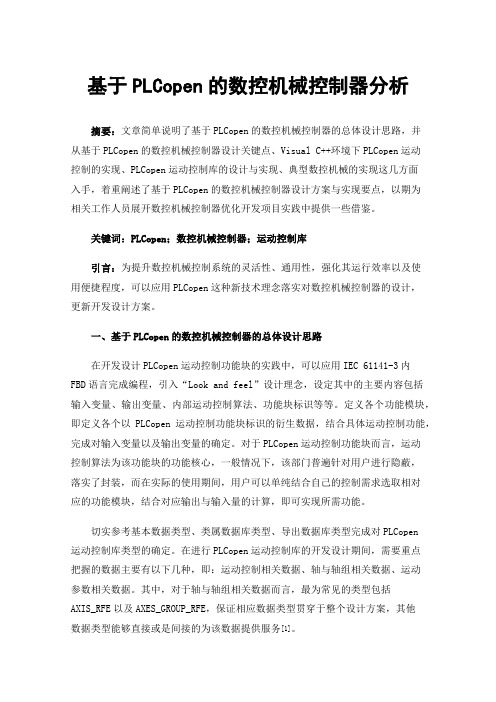
基于PLCopen的数控机械控制器分析摘要:文章简单说明了基于PLCopen的数控机械控制器的总体设计思路,并从基于PLCopen的数控机械控制器设计关键点、Visual C++环境下PLCopen运动控制的实现、PLCopen运动控制库的设计与实现、典型数控机械的实现这几方面入手,着重阐述了基于PLCopen的数控机械控制器设计方案与实现要点,以期为相关工作人员展开数控机械控制器优化开发项目实践中提供一些借鉴。
关键词:PLCopen;数控机械控制器;运动控制库引言:为提升数控机械控制系统的灵活性、通用性,强化其运行效率以及使用便捷程度,可以应用PLCopen这种新技术理念落实对数控机械控制器的设计,更新开发设计方案。
一、基于PLCopen的数控机械控制器的总体设计思路在开发设计PLCopen运动控制功能块的实践中,可以应用IEC 61141-3内FBD语言完成编程,引入“Look and feel”设计理念,设定其中的主要内容包括输入变量、输出变量、内部运动控制算法、功能块标识等等。
定义各个功能模块,即定义各个以PLCopen运动控制功能块标识的衍生数据,结合具体运动控制功能,完成对输入变量以及输出变量的确定。
对于PLCopen运动控制功能块而言,运动控制算法为该功能块的功能核心,一般情况下,该部门普遍针对用户进行隐蔽,落实了封装,而在实际的使用期间,用户可以单纯结合自己的控制需求选取相对应的功能模块,结合对应输出与输入量的计算,即可实现所需功能。
切实参考基本数据类型、类属数据库类型、导出数据库类型完成对PLCopen运动控制库类型的确定。
在进行PLCopen运动控制库的开发设计期间,需要重点把握的数据主要有以下几种,即:运动控制相关数据、轴与轴组相关数据、运动参数相关数据。
其中,对于轴与轴组相关数据而言,最为常见的类型包括AXIS_RFE以及AXES_GROUP_RFE,保证相应数据类型贯穿于整个设计方案,其他数据类型能够直接或是间接的为该数据提供服务[1]。
光阳plc内部构造
光阳plc内部构造
光阳PLC(可编程逻辑控制器)是一种用于工业控制系统的计
算机控制系统,它能够监控输入信号并根据预设的逻辑程序进行输
出控制。
PLC的内部构造一般包括以下几个主要部分:
1. 中央处理器(CPU),光阳PLC的核心部件,负责执行用户
编写的程序,处理输入信号和输出控制指令。
CPU通常集成了微处
理器、存储器和输入/输出接口。
2. 输入/输出模块(I/O模块),用于连接外部传感器、执行
器等设备的接口模块,负责将外部信号转换为数字信号供CPU处理,并将CPU输出的控制指令转换为相应的输出信号。
3. 存储器,包括程序存储器和数据存储器。
程序存储器用于存
储用户编写的逻辑控制程序,而数据存储器则用于存储程序执行过
程中的临时数据和运行状态信息。
4. 通信接口,用于与其他设备进行通信,如人机界面(HMI)、上位机或其他PLC之间的通讯。
5. 电源模块,负责为PLC系统提供稳定的电源供应。
在光阳PLC内部,这些部件相互配合,通过输入/输出模块与外部设备进行连接和通信,CPU执行用户编写的逻辑控制程序,实现对工业生产过程的监控和控制。
同时,PLC还可能包括一些辅助部件和功能模块,如定时器、计数器、模拟量输入输出模块等,以满足不同工业控制需求。
总的来说,光阳PLC的内部构造是一个复杂而高效的系统,它能够通过各种接口和模块实现对工业生产过程的精确控制和监控。
XCM系列运动控制型PLC用户手册(2011-3-10更新)
前言
XCM 运动控制型 PLC 功能特点
XCM 运动控制型 PLC 的概述
XCM 运动控制型具有如下特点: ¾ 集运动控制功能及普通 PLC 功能于一身的可编程控制器 XCM 系列运动控制型 PLC 不仅支持运动控制功能,同样支持普通 PLC 的绝大部分 功能,包括高速脉冲、高速计数、中断、PID 控制等。 ¾ 最多可支持 10 轴脉冲输出 XCM 系列包含 3 轴、4 轴、10 轴脉冲输出,最大化满足了用户的控制需求。 ¾ 优越的运动控制性能 可实现两轴联动,支持普通运动控制指令如圆弧,直线插补等。 ¾ 平面转换功能 支持平面转换 PLAN 指令,可进行 X-Y、Y-Z、X-Z 等的两轴联动转换。 ¾ 可扩展 XC 系列开关量、模拟量模块以及 BD 板 与 XC 系列 PLC 相似,XCM 系列同样支持模块和 BD 板的扩展,包括开关量、温度 模拟量模块等。 ¾ 追踪控制功能 XCM-24/32T3 可实现追踪控制功能,适用于材料的连续加工,可实现定长、定标两 种加工方式。
1-1.产品规格 ....................................................................................................................................2 1-2.外形尺寸 ....................................................................................................................................4 1-3.端子台排列................................................................................................................................. 5 1-4.通讯口引脚定义......................................................................................................................... 7 2.电源电路的规格、输入输出规格与外部配线 ................................................................................8 2-1.电源规格 ....................................................................................................................................9 2-2.AC电源、DC输入型 ...............................................................................................................10 2-3.输入规格 .................................................................................................................................. 11 2-4.DC输入信号处理(AC电源型)............................................................................................ 12 2-5.输出规格及输出电路的处理 ................................................................................................... 14 3.运动控制指令、参数、特殊数据寄存器及辅助继电器说明 ......................................................17 3-1.软元件编号一览表................................................................................................................... 18 3-2.运动控制指令一览表(XCM系列专用) .............................................................................. 20 3-3.指令说明的阅读方法............................................................................................................... 21 3-4.运动控制指令........................................................................................................................... 23 3-5.运动控制参数........................................................................................................................... 41 3-6.特殊数据寄存器一览表........................................................................................................... 46 3-7.特殊辅助继电器一览表........................................................................................................... 47 3-8.脉冲输出标志位一览表........................................................................................................... 49 3-9.应用案例 ..................................................................................................................................53 4.附录.................................................................................................................................................. 61 4-1.基本顺控制令表....................................................................................................................... 62 4-2.应用指令一览表....................................................................................................................... 63 4-3.特殊功能指令一览表............................................................................................................... 66 4-4.高速计数器分配....................................................................................................................... 67 4-5.频率测量端口分配................................................................................................................... 68 4-6.外部输入中断分配................................................................................................................... 69
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业控制系统解决方案提供商
军创(厦门)自动化科技有限公司
Junchuang(XiaMen)automatic technology Co.,Ltd
PLC可编程控制器 多轴运动控制器
工业控制系统专家
工业控制系统专家
Expert in industrial control systems
关于军创
军创(厦门)自动化科技有限公司长期专注于工业自动化领域核心控制系统的自主 研发、生产与销售,为中高端设备制造商及系统集成商提供整体系统解决方案。
军 创 公 司 利 用P L C控 制 器 本 身 的 高 速 脉 冲 输 出 口 来 控 制 步 进 、 伺 服 电 机 , 该 系 统 通 过 选 用 内 部 带 多 路 硬 件 定 时 器 的C P U来 实 现 多 路 的 脉 冲 输 出 功 能 , 可 同 时 驱 动2 4台 电机。设计体积小,编程简单,性价比高,不仅减少了控制系统设计的工作量,而 且提高了控制系统的可靠性。
应用领域
自动点胶
多轴运动控制器
多轴运动控制器从最内核开始完全自主研发,具备多种运动控制功能和强大的扩展 性,支持任意空间直线插补、圆弧插补、螺旋插补、空间圆弧、椭圆插补、椭圆螺 旋插补、电子凸轮、电子齿轮、追剪、轮切、同步跟踪、运动叠加、虚拟轴、硬件 位 置 锁 存 、 位 置 比 较 输 出 、 连 续 插 补 、 运 动 暂 停 等 , 支 持 总 线 扩 展I O和 运 动 轴 。
03
光伏发电 印刷
工业控制系统专家
Expert in industrial control systems
自动包装 数据采集分析
自动编织
04
产品优势
U盘远程更新PLC程序,梯形图文件加密处理,程序安全可靠,保护客户知识产权。
P L C上 插 入U盘,只 需1 S 左 右,程 序 自 动 更 新
工业控制系统专家
④
⑤
⑥
①
⑦
③Hale Waihona Puke ②编号 ① ② ③ ④ ⑤ ⑥ ⑦
说明 RS232 RS485 U盘接口 电源指示灯 运行指示灯 扩展指示灯 运行出错指示灯
07
工业控制系统专家
Expert in industrial control systems
产品规格
型号
32点
40点
60点
80点
JC-16DI16DO JC-16DI24DO JC-24DI16DO JC-24DI16DO-2AO JC-24DI36DO JC-32DI48DO
Expert in industrial control systems
先进的掉电保存技术 当电池没电时,程序和数据不会丢失,永久保存
通讯方式多样
单板可驱动24台步进/伺服电机
...
1#电机
2#电机
3#电机
24#电机
05
RS232 RS485 USB 以太网
物联网 WIFI 蓝牙
通讯协议:支持MODBUS RTU、MODBUS TCP/IP、MODBUS ASCII、CANOpen、EtherCat、自定义协议RS等。
军创(厦门)自动化科技有限公司
J u n c h u a n g ( X i a M e n)a u t o m a t i c t e c h n o l o g y C o . , Ltd
自主科研 创新共赢
地址:厦门 火炬高新区(翔安)产业区 翔 星路96号 建 业楼A座705室 网址:w w w.jc-p l c . com 电话:0 5 92-716 8 7 9 6 传真:0 5 92-716 8 7 2 6 邮箱:j b y@jc-p l c . com
—
—
高速脉冲输出最大频率 200KHz
200KHz
200KHz
200KHz
200KHz
200KHz
高速脉冲输入点数
4
4
4
4
4
—
高速脉冲输出点数
16
24
8
8
32
48
驱动电机数
8台
12台
4台
4台
16台
24台
性能特点
单 板 驱 动 电 机 : 脉 冲+方 向 方 式 : 可 驱 动 多 达2 4轴 步 进 、 伺 服 电 机 ; 总 线 方 式 : 驱 动 伺 服 个 数 没 有 限 制 。 通 讯 方 式 : 采 用 R S 2 3 2 、 R S 4 8 5 双 通 讯 口 , 均 可 实 现 H M I 或 P C 通 讯 , 兼 容 M O D B U S A S C I I、M O D B U S RT U通 讯 协 议 。 先 进 的 掉 电 保 存 技 术 : 电 池 没 电 时 程 序 和 数 据 区 也 不 会 丢 失 ,P LC程 序 安 全 可 靠 , 保 护 客 户 的 知 识 产 权 。 扩 展 : 可 扩 展 到2 5 6个 隔 离 输 入/输 出 口 。
可根据用户需求专业定制
06
标准型PLC可编程控制器
产品概述
传 统 的P L C控 制 器 由 于 脉 冲 加 方 向 的 控 制 方 式 , 最 多 只 能 驱 动4台 电 机 。 在 需 要 同 时 驱 动 多 台 电 机 的 情 况 下 , 需 使 用 多 个P L C控 制 器 联 机 驱 动 。 设 备 接 线 复 杂 , 成 本 很 高 。
01
02
产品简介
PLC可编程控制器
P L C可 编 程 控 制 器 除 了 具 备 市 面 上 传 统P L C的 功 能 之 外 , 还 具 备U盘 远 程 下 载 程 序 功 能、指令定制、内置特殊算法定制、特殊硬件接口定制等特殊功能,单板可驱动多 达2 4轴 步 进 、 伺 服 电 机 , 支 持 多 种 通 讯 技 术 , 连 接 方 便 , 更 具 性 价 比 、 集 成 性 、 智 能 性 , 将 逐 渐 取 代 传 统P L C可 编 程 控 制 器 。
公司主营产品:自主研发标准/定制型PLC可编程控制器、多轴运动控制器等。
产品主要应用于自动点胶、自动包装、光伏发电、数据采集分析、自动缝纫、编织、 印刷、食品、医疗等领域的控制系统和设备厂商。
企业文化
企业宗旨:坚守初心,质造国产精品。 企业使命:持续加强自主科研创新。 企业愿景:填补国内高端市场空缺。 人才理念:事业感召人才,人才成就事业。 经营理念:客户至上,技术领先,制度为本,团队协作。
供电方式
DC24V
DC24V
DC24V
DC24V
DC24V
DC24V
输出方式
NPN
NPN
NPN
NPN
NPN
NPN
输出额定电流
0.5A
0.5A
0.5A
0.5A
0.5A
0.5A
数字量输入点数
16
16
24
24
24
32
数字量输出点数
16
24
16
16
36
48
模拟量输出点数
—
—
—
2
—
—
模拟量输出电压范围
—
—
—
0-10V