一种旋转相位干涉仪测角解模糊算法
开环旋转相位干涉仪DOA算法分析

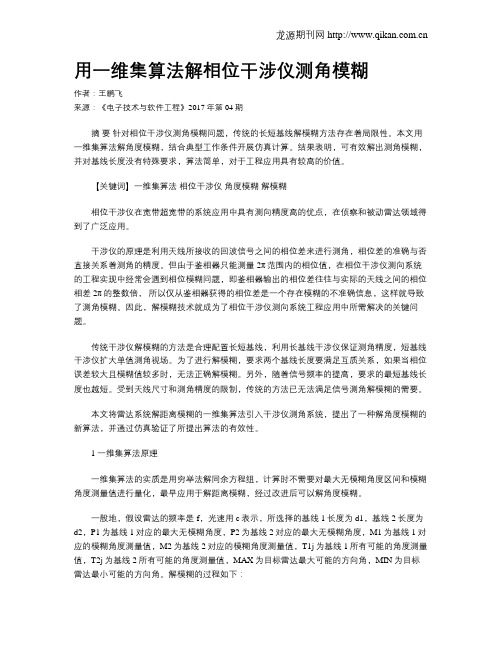
天线 向位 置 B旋转 时 , 瞬时相 位差将 变 化为 :
大 相 位差 为 , 另 一边 的最 大 相位 差 为一 , 于 在 位
视 轴 方 向 0 0 一 0 那 么当 辐射源 位 于视轴 下方 — , 。 或 上 方 的最 大方 位角 ± 时 , 一± 7, 人式 ( ) c代 3 中
得 到:
图 2 旋 转 相 位 干 涉 仪 天 线 运 动 模 型
第1 2卷 第 5期
21 年 1 0 1 O月
解放 军理 工 大学 学报 ( 自然 科 学版 )
Junl f L n e i f c ne n eho g ( a rl c ne d i ) orao P A U i rt o i c d cnl y N t aSi c E i n v sy S e a T o u e t o
2 r , 7+
() 2
式 中, 为模 糊数 。对 式 ( ) 2 进 行变 换 , 1( ) 可得
s 一 7 一 ( r 9 i 磐 2m+ ) n 厶 ( 2 。 上 。
一 厶7 L 【
( 3 )
由式 ( ) 以看 出 , 3可 当入 射 角 一 定 时 , 天 线 两
g ・
Ant nn s m o m e f r t tn nt r e o e e e a ve nto o a ig i e f r m t r
1 相 位 干涉 仪 模 型 及 测 角 方 法
基于旋转干涉仪的近场源参数估计算法

i f e l d s o u r c e . Th e a l g o r i t h m e x p l o i t s t h e r o t a t i o n o f a s i n g l e l o ng b a s e l i ne i n t e r f e r o me t e r a n d t he i n t e g r a t i o n
引用格式 :马 菁涛 , 陶海 红, 谢坚, 等. 基于旋转干涉仪 的近场源 参数估计算法 [ J ] . 雷达学报 , 2 0 1 5 , 4 ( 3 ) : 2 8 7 - 2 9 4 D O I : 1 0 . 1 2 0 0 0 / J R 1 4 1 4 6 .
Re f e r e n c e f o r ma t :M a J i n g — t a o ,Ta o Ha i — ho n g, Xi e J i a n e £a 1 . .Ro t a t i n g i n t e r f e r o me t e r — b a s e d a l g o r i t h m f o r
e l i mi n a t e d i n t h e n e a r — ie f l d s o u r c e s c e n a r i o .Th e a l g o r i t h m c a n o b t a i n t h e c l o s e d f o r m s o l u t i o n s o f t h e e l e v a t i o n
摘 要 :该 文 基 于 旋 转 干 涉 仪 提 出 了一 种 新 的近 场 源 参 数 估 计 算 法 。 该 算 法 利 用 单 个 长基 线 干 涉 仪 的旋 转 和 相 位 积 分 实 现 相 位 解 模 糊 ,有 效解 决 了 单 基 线 干 涉 仪 在 近 场 源 情 况 中存 在 的 无 模 糊 视 角 范 围和 测 角 精 度 之 间 的 矛 盾 。
基于相位干涉仪测向的定位模糊区计算

( 上接第 140页 )
( 1) 计算测量数据的概率分布, 与假定的一组
分布进行比较, 确定匹配最好的分布; ( 2) 采用最大期望算法对参数 K进行估计。
但以上两种方法比较耗时, 不适于工程应用, 后来又出现易于实时估计的参数估计方法 [ 5] 。
方法 l 接收信号为: g ( t) = V + v( t )
摘 要 采用相 位干涉仪测向原理的雷达对抗侦察设备, 对辐射 源进行 无源定 位时, 定位模 糊区的 计算方法、过 程及 结果。计算过程中对一些参数 进行了简化和忽略, 只计算单基线的相位干涉仪的定 位模糊区, 得 出获得最 小定位模糊 区时 的测向角度。
关键词 交叉定 位; 定位模糊区; 相位干涉仪 中图分类号 TN 974
Abstrac t anoma lous p ropaga tion may be appeared,
w hile rada r e lectrom agne tic wave propagat ing in the a t
m osphere. Especia lly w hen the re is a tm ospher ic duct in
4 结束语
本文对单基线相位干涉仪的定位模糊区的计 算方法进行了阐述, 给出了计算过程、结果和定位
模糊区面积相对值的关系曲线, 并且做了比较, 得 出了获得最小定位模糊区的测向角度。我们在计 算时, 仍然对一些变量进行了忽略。可以进一步地 精确计算, 以得到更加准确的数值。
参考文献
[ 1] 林象平. 雷达 对抗原 理 [ M ]. 西安: 西北 电讯工 程 学院出版社, 1985
by W ang J iangang
Abstrac t The ca lcu la tion m ethod, process, and re su lt
用一维集算法解相位干涉仪测角模糊
用一维集算法解相位干涉仪测角模糊作者:王鹏飞来源:《电子技术与软件工程》2017年第04期摘要针对相位干涉仪测角模糊问题,传统的长短基线解模糊方法存在着局限性。
本文用一维集算法解角度模糊,结合典型工作条件开展仿真计算。
结果表明,可有效解出测角模糊,并对基线长度没有特殊要求,算法简单,对于工程应用具有较高的价值。
【关键词】一维集算法相位干涉仪角度模糊解模糊相位干涉仪在宽带超宽带的系统应用中具有测向精度高的优点,在侦察和被动雷达领域得到了广泛应用。
干涉仪的原理是利用天线所接收的回波信号之间的相位差来进行测角,相位差的准确与否直接关系着测角的精度。
但由于鉴相器只能测量2π范围内的相位值,在相位干涉仪测向系统的工程实现中经常会遇到相位模糊问题,即鉴相器输出的相位差往往与实际的天线之间的相位相差2π的整数倍,所以仅从鉴相器获得的相位差是一个存在模糊的不准确信息,这样就导致了测角模糊。
因此,解模糊技术就成为了相位干涉仪测向系统工程应用中所需解决的关键问题。
传统干涉仪解模糊的方法是合理配置长短基线,利用长基线干涉仪保证测角精度,短基线干涉仪扩大单值测角视场。
为了进行解模糊,要求两个基线长度要满足互质关系,如果当相位误差较大且模糊值较多时,无法正确解模糊。
另外,随着信号频率的提高,要求的最短基线长度也越短。
受到天线尺寸和测角精度的限制,传统的方法已无法满足信号测角解模糊的需要。
本文将雷达系统解距离模糊的一维集算法引入干涉仪测角系统,提出了一种解角度模糊的新算法,并通过仿真验证了所提出算法的有效性。
1 一维集算法原理一维集算法的实质是用穷举法解同余方程组,计算时不需要对最大无模糊角度区间和模糊角度测量值进行量化,最早应用于解距离模糊,经过改进后可以解角度模糊。
一般地,假设雷达的频率是f,光速用c表示,所选择的基线1长度为d1,基线2长度为d2,P1为基线1对应的最大无模糊角度,P2为基线2对应的最大无模糊角度,M1为基线1对应的模糊角度测量值,M2为基线2对应的模糊角度测量值,T1j为基线1所有可能的角度测量值,T2j为基线2所有可能的角度测量值,MAX为目标雷达最大可能的方向角,MIN为目标雷达最小可能的方向角。
一种新的雷达信号旋转干涉仪测向解模糊算法

t i o n,t h e n a i mi n g a t he t p r o b l e m t h a t f o r K a — b a n d r a d a r s i g n a l s he t p h se a d i f e r e n c e b e c o me s g r e a t e r w h e n u s i n g
第5 3 卷 第 3 期 2 0 1 3年 3 月 u n i c a i t o n En g i ne e r i n g
V0 1 . 5 3 N o . 3
MB I " 2 0l 3
d o i : 1 0 . 3 9 6 9 / j . i s s n 。 1 0 0 1 —8 9 3 x . 2 0 1 3 . 0 3 . 0 1 4
A Ne w Me t h o d f o r Amb i g u i t y S o l v i n g Ba s e d o n Ro t a r y I n t e r f e r o me t e r
一种改进的多基线相位干涉仪解模糊算法
一种改进的多基线相位干涉仪解模糊算法居易;张学成;邵文建【摘要】针对多基线相位干涉仪的相位模糊问题,提出了一种基于参差基线解模糊算法原理的改进解模糊算法.该算法具有计算量小、适合实时计算以及正确概率高的优点,并通过算法复杂度计算以及正确概率仿真验证了上述结论.【期刊名称】《舰船电子对抗》【年(卷),期】2018(041)004【总页数】4页(P62-65)【关键词】多基线;相位干涉仪;参差基线;解模糊【作者】居易;张学成;邵文建【作者单位】中国船舶重工集团公司第七二三研究所,江苏扬州225101;中国船舶重工集团公司第七二三研究所,江苏扬州225101;中国船舶重工集团公司第七二三研究所,江苏扬州225101【正文语种】中文【中图分类】TN9710 引言无源定位技术是电子战侦察系统中的关键技术,而对辐射源的精确测向是实现准确定位的前提条件,因此精确测向对电子战侦察系统具有非常重要的意义。
在现有的测向体制中,干涉仪测向具有精度高、结构简单、观测频带宽的优点[1-3]。
受阵元本身物理尺寸的限制,在最小半波长的空间内无法安装2个阵元,只能采用阵元间距大于半波长的几何配置,并且多基线相位干涉仪测量相位存在周期性,因此会带来相位干涉仪的相位差模糊问题[4]。
如果在解相位模糊时得到错误的模糊数,会导致测向误差超差,因此解模糊是多基线相位干涉仪测向的关键问题。
本文基于参差基线解模糊算法原理[5],利用最长基线鉴相精度,提出了一种解模糊的改进算法。
与传统的解模糊算法相比,其具有计算量较小、适合实时计算以及正确概率较高的优点,适合工程应用。
1 多基线干涉仪测向原理设N元天线组成的一维相位干涉仪阵列[6]如图1所示,相邻阵元间的基线长度分别为D 1,D 2,…,D n,雷达信号的波长为λ,则基线D n的相位差Φn为:当D n>λ/2时,会出现相位模糊,理论测量相位差ϕn为:式中:k n为基线D n的模糊数。
通过相位差Φn,就可以得到信号的入射角θ。
一种干涉仪测向解模糊的方法
95电子技术Electronic Technology电子技术与软件工程Electronic Technology & Software Engineering示。
而家属或医护人员可通过远程终端(手机或电脑),使用键鼠或触屏点击的方式进行终端操作。
设备自带的高清摄像头组件,则可通过互联网,随时随地连接到脑电信息沟通系统,辅助视频互动。
4.5 视觉刺激模块视觉刺激模块采取SSVEP-BCI 脑电范式。
稳态视觉诱发电位作为BCI 系统常使用的一种信号范式,它是在人眼受到固定频率超过3.5Hz 的视觉刺激时,大脑皮质活动将被调动,导致类似于刺激的周期性节律活动。
SSVEP-BCI 通过固定频率的闪烁刺激诱发。
而诱发产生SSVEP 信号的视觉刺激源通常包括光刺激源、图形刺激源以及模式翻转刺激源。
依照具备多目标、多任务的非侵入BCI 模式的使用场景,本文系统采取常见的LCD 型刺激源硬件,更易于编程设计刺激形状和刺激颜色等条件。
但LCD 型刺激源产生的刺激频率受到LCD 屏幕刷新率的限制。
为了避免两种刺激频率难以区分,编程设计的刺激频率不应为倍数集合,并且设计的刺激频率也应该大于4Hz [5]。
此外,由于过多检测对象需要极高的识别精度,所以本文系统每层设计不多于五个刺激源图像。
比如,如图8所示,设置“帮助”、“沟通”和“娱乐”,分别以29.95Hz 、14.98Hz 和5.99Hz 的频率闪烁,界面右侧则是专注度指标尺和返回键。
5 结束语立足于解决语体失能患者与外界的沟通难题,本文设计与实现了一种基于TGAM 模块的脑电信息沟通系统。
该系统采用美国神念科技的TGAM 芯片,基于SSVEP-BCI 脑电范式,完成了从脑电信号采集,到脑电信号处理分析,以及脑电信号运用的一整套脑波控制的标准化流程,实现了将脑波“意念”转化为他人可直观解读的个人需求信息或意愿信息的目的。
语体失能病患能够通过该脑电信息沟通系统,与外界进行有效交流。
一种干涉仪测向解模糊的方法
一种干涉仪测向解模糊的方法干涉仪是一种重要的测量仪器,可以用于测量物体的大小、形状、位置和运动等多个参数。
然而,由于测量时可能存在多径效应、多普勒效应等误差,会导致信号解模糊,使得精度降低。
因此,对于如何解决干涉仪测向解模糊问题,一直是研究热点。
目前,常见的干涉仪测向解模糊方法有信号处理方法和系统设计方法。
其中,信号处理方法主要包括脉冲压缩技术、多普勒频率偏移技术和FFT 滤波技术等;系统设计方法则包括基于相控阵技术的干涉仪设计和改进干涉仪物理结构的方法。
一、信号处理方法1、脉冲压缩技术脉冲压缩技术是一种有效的解决干涉仪信号解模糊的方法。
该技术是通过设计一组矩形窗口函数,将信号在时域中进行压缩,使其在频域中得到展宽,从而提高信号的信噪比和分辨率。
具体实现步骤为:首先,干涉仪测量到的信号是一组宽度较大的正弦波,通过设定一组窗口函数来进行脉冲压缩,将信号在时域上进行压缩,然后在频域上实现展宽,使得信号的时间宽度和频率带宽成反比例关系。
这样,就可以在保持较好的时间分辨能力的同时,提高测量精度。
2、多普勒频率偏移技术在干涉仪测量过程中,对于高速运动的物体,存在多普勒频率偏移现象,这会导致解模糊问题。
因此,在测量高速运动物体时,需要采用多普勒频率偏移技术来消除多径效应,从而提高信号分辨率。
具体实现步骤为:在信号处理过程中,可以通过改变激光束发射和接收的频率,来产生多普勒频率偏移,从而消除多径效应。
这样,就可以提高信号的可靠性和精度。
3、FFT 滤波技术FFT 滤波技术是一种常见的信号处理技术,在干涉仪中同样可以用于信号去噪和解模糊。
该技术基于傅里叶变换原理,将时域信号转化为频域信号,并利用滤波器来滤除噪声和多径效应,从而实现信号解模糊。
具体实现步骤为:首先,通过傅里叶变换将信号从时域转换到频域,然后利用滤波器滤除噪声和多径效应。
最后,通过逆傅里叶变换将频域信号恢复成时域信号,以完成对信号的解模糊处理。
二、系统设计方法1、基于相控阵技术的干涉仪设计基于相控阵技术的干涉仪设计是一种新型干涉仪测向解模糊的方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种旋转相位干涉仪测角解模糊算法∗郭斌兴;张永杰【摘要】A new algorithm of solving angle ambiguity of rolling interferometer based on second-order differential information of phase change curve was proposed and induced, considering the limitation of traditional algorithms that are not applicable to severe ambiguity. Ac-cording to continuity of cosine function and applying the maximum likelihood criterion, the algorithm the discriminator phase difference in-formation of current point and the former two points, correct ambiguity number of current point. The simulation results show that, compared with traditional algorithms, the new algorithm can be applicable to severe ambiguity. orrectness and effectiveness been verified in.%针对旋转相位干涉仪测角解模糊传统算法在大模糊度时无法正确解算的局限,提出一种基于相位差变化曲线二阶差分信息解模糊的新算法。
该方法根据余弦函数的连续性,利用当前点及前两点的鉴相相位差信息,按照最大似然准则,解算出当前点的正确模糊数。
仿真结果表明,相比传统算法,该算法解模糊能力大大提高,其正确性和有效性已在工程实际中得到验证。
【期刊名称】《弹箭与制导学报》【年(卷),期】2015(000)002【总页数】5页(P185-189)【关键词】旋转相位干涉仪;测角;解模糊【作者】郭斌兴;张永杰【作者单位】毫米波遥感技术重点实验室,北京 100854;毫米波遥感技术重点实验室,北京 100854【正文语种】中文【中图分类】TH753.6旋转相位干涉仪因其较高的测角精度及设备量少等优点,在导航、遥感、探测等民用和军事领域获得广泛应用。
在旋转相位干涉仪测角的工程实现中,一个关键问题是解相位模糊问题,即鉴相器输出的相位差其主值区间为[-π,π],与真实相位差相差2π的整数倍,存在相位模糊。
文献[1-2]中传统体制的单基线旋转干涉仪采用模拟接收机,解模糊利用时延跟踪环路,根据相位差变化随时调整延时线长度,但其限制是相邻脉冲间的相位差变化不能超过π/2。
文献[3-4]提出的解模糊算法,采用直接对相位差进行积分累加运算,恢复相位差随时间变化(随旋转)全相位差曲线,解模糊能力有相当提高,但相邻脉冲间的相位差变化也不能超过π。
针对上述传统方法在大模糊度时无法正确解算的局限,文中提出了一种基于相位差变化曲线二阶差分信息解模糊的新算法,该算法提高了测量信息的利用度,使得解模糊能力进一步增强。
单基线旋转相位干涉仪包含两个接收通道。
如图1所示,A、B两个天线固联于基线两端,接收目标辐射的电磁波。
当目标与基线在同一平面时,目标发出的平面波到达天线A、B的相位差为:其中:β为目标视线角;D为两天线基线长度;λ为信号波长。
若两个接收通道的相位响应完全一致,则接收机输出的信号相位差仍为φ。
在鉴相器中得到鉴相相位差φJ,φJ∈[-π,π],与真实相位差φ的关系为:式中,整数k为模糊数。
如图2所示,当相位干涉仪连续旋转,基线有效长度变化。
此时,两天线接收信号的真实相位差不再是一个固定值,而是按余弦规律变化:其中:ω为基线自旋角频率;ψ为旋转角的初相。
制导用旋转相位干涉仪一般接收目标发射的脉冲串信号,每接收一个脉冲,得到一次鉴相结果,相当于对相位差变化曲线进行一次采样(以下均指采样的相位差变化曲线)。
由于鉴相器输出相位差的主值区间只能为[-π,π],因此其输出φJ(t)相当于把φ(t)在主值区间进行截断和平移,如图3所示。
所以,旋转相位干涉仪测角解模糊,就是依据一定算法,解算各采样点相位差的正确模糊数k,进一步恢复出相位差变化曲线,判断曲线的极大值φmax和极小值φmin,计算视线角:旋转相位干涉仪相位差变化曲线服从余弦规律,如果对原始的φ(t)求微分,得到:dφ(t)=-2πD·ω·sinβsin(ωt+ψ)·dt/λ可知,对φ(t)、φJ(t)同时取微分运算,除了截断点,其余都呈现基本一致的变化规律。
同上,在旋转过程中相位干涉仪接收目标辐射的脉冲串信号,鉴相器输出一串离散的相位差值φJ(n),相当于对连续的φJ(t)曲线按脉冲重复频率的采样率进行采样。
假设脉冲重复频率为fr,则Tr=1/fr。
对应dφ(t),由式(5)得到真实相位差变化曲线相邻两点的差分值为:Δφ(n)=-2πDsinβ·ω·sin(ωnTr+ψ)·Tr/λ= -Δφmax·sin(ωnTr+ψ)干涉仪旋转一周,真实相位差变化曲线相邻两点间,即相邻脉冲间最大相位变化量为Δφmax=2π·D·sinβ·ω·Tr/λ,称为相位差模糊度,Δφmax的大小决定了解模糊的难度。
基线长度D一定,当弹旋频率ω越高、目标信号载频波长λ越短、脉冲重复频率fr越低、目标偏角β越大,Δφmax取值越大,则解模糊难度越大。
设真实相位差变化曲线相邻两点为φ(n-1)、φ(n),与之对应的鉴相相位差为φJ(n-1)、φJ(n),其模糊数分别为kn-1、kn,则真实相位差φ(n)的一阶差分值为:Δφ(n)=φ(n)-φ(n-1)=[φJ(n)-φJ(n-1)]+(kn-kn-1)·2π=ΔφJ(n)+(kn-kn-1)·2π进而,得:φ(n)=φ(n-1)+ΔφJ(n)+ (kn-kn-1)·2π其中:鉴相相位差的差分值ΔφJ(n)由φJ(n-1)、φJ(n)直接相减得到。
若知道φ(n-1),解出正确的(kn-kn-1)值,则可推出φ(n)。
3.1 基于一阶差分信息解模糊如果相位差模糊度Δφmax≤π,可通过文献[3-4]提出的方法解模糊。
由相邻两点鉴相相位差的取值区间,得到其差分值取值区间为:⟹ΔφJ(n)=φJ(n)-φJ(n-1)∈[-2π,2π]因为Δφmax≤π,真实相位差变化曲线相邻两点的一阶差分值为:这样,只要通过计算ΔφJ(n)所在区间,即可判断出kn与kn-1的差值。
令φ(1)=φJ(1),有:1)当ΔφJ(n)∈[-2π,-π),则kn-kn-1=1;2)当ΔφJ(n)∈[-π,π],则kn-kn-1=0;3)当ΔφJ(n)∈(π,2π],则kn-kn-1=-1。
解模糊后的相位差与真实相位差存在一直流偏差,不影响测角正确性。
然而,上述算法仅在Δφmax≤π时有效,其局限性显而易见。
3.2 基于二阶差分信息解模糊为解决3.1节算法局限性,文中提出一种利用相位差变化曲线二阶差分信息解模糊的新算法,进一步提高解模糊能力。
由式(7)可推知,当Δφmax≤4π,令(kn-kn-1)=i,则有i∈[-2,2]。
以下步骤将阐述,如何利用相位差变化曲线的二阶差分信息,从可能的5个i值中判别、推导出正确的kn。
1)判定解模糊初始位置在旋转相位干涉仪第一个旋转周期内,依次计算相邻两点鉴相相位差φJ(n-1)、φJ(n)的一阶差分值:当ΔφJ(n-1)·ΔφJ(n)≤0且趋近于0,则φJ(n-1)对应的点为真实相位差变化曲线的波峰或波谷位置,即解模糊初始位置,令:模糊数kn-1=0,解模糊相位差φ(n-1)=φJ(n-1),其一阶差分值Δφ(n-1)=0。
2)计算φJ(n)的5个可能模糊数当相位差模糊度Δφmax≤4π时,穷举当前点φJ(n)的5个可能模糊数其中:kn-1为上一点φJ(n-1)的正确模糊数,i为当前点φJ(n)与上一点φJ(n-1)的模糊数差值。
φJ(n)的5个可能模糊数中,有且仅有一个是正确模糊数,解模糊的目的就是找出这个模糊数。
3)计算5个对应的二阶差分值根据式(13),依次计算5个对应的二阶差分值其中:φJ(n)为当前点鉴相相位差为可能模糊数为当前点可能模糊数对应的一阶差分值;φ(n-1)为上一点解模糊相位差;Δφ(n-1)为上一点解模糊一阶差分值。
4)解算出φJ(n)的正确模糊数kn对5个二阶差分值取绝对值进行比较,选择出最小的绝对值记为根据余弦函数连续性,按照最大似然准则,确定正确模糊数:其中arg表示φJ(n)的正确模糊数kn等于目标函数取最小值时对应的5)计算正确相位差φ(n)根据正确模糊数kn,计算φJ(n)解模糊后的正确相位差φ(n)=φJ(n)+2knπ,用于恢复相位差变化曲线;计算φ(n)的一阶差分值Δφ(n)=φ(n)-φ(n-1),用于下一点鉴相相位差φJ(n+1)的解模糊。
实质上,本算法的核心是利用了余弦曲线微分函数的连续性。
之所以要取绝对值最小的二阶差分值是因为只有相邻两个点一次微分值变化最小,才能满足其连续要求。
换句话说,满足二阶差分值最小绝对值的i值就是正确的(kn-kn-1)值。
对两种算法进行仿真验证,并对比分析其解算效果。
设干涉仪基线长度D=150 mm,旋转角频率ω=16×2π,目标视线角β=30°,射频信号f=36 GHz(λ=8.33 mm),通过改变脉冲重复频率fr调整相位差模糊度Δφmax。
在一定信噪比SNR条件下,两个通道相位差误差的均方根值为假设由于噪声干扰在真实相位差φ(n)上产生了大小为δφ(n)的相位差误差,仿真中假定δφ(n)在[-3σφ,3σφ]内服从独立均匀分布[5]。
1)设fr=2.5 kHz,则Δφmax=0.72π<π,SNR=20 dB,仿真结果如图4、图5所示。
2)设fr=0.5 kHz,Δφmax=3.62π∈[π,4π),仿真结果如图6、图7所示。
3)当fr=2 kHz,Δφmax=0.9π<π时,对两种算法正确解模糊概率随信噪比SNR的变化进行蒙特卡洛仿真,结果如图8所示。
4)对不同相位差模糊度Δφmax时,基于二阶差分信息的解模糊算法正确解模糊概率随信噪比SNR的变化进行蒙特卡洛仿真,结果如图9所示。