连续搅拌釜式反应器(CSTR)控制系统设计 连续
理想混合连续搅拌釜式反应器(CSTR)
理想混合状态
物料在反应器内达到完全混合,不存在浓度和温度 的梯度分布。
反应器内各点的物料性质(如浓度、温度等)完全 相同,且随时间保持不变。
在理想混合状态下,反应器的性能达到最优,反应 效率和产物质量得到保证。
03
CSTR反应器的数学模型
物料平衡方程
进入反应器的物料流量与离开 反应器的物料流量相等,即输 入等于输出。
用于连续加入反应物和排出产物,实现连续化生产 。
工作流程
01
02
03
04
物料进入
反应物通过进料口连续加入反 应器内。
充分混合
在搅拌装置的作用下,物料在 反应器内充分混合,达到浓度 和温度的均匀分布。
反应进行
在适宜的反应条件下,物料在 反应器内进行化学反应。
产物排出
反应完成后,产物通过出料口 连续排出反应器。
100%
平均停留时间
表示物料在反应器内的平均停留 时间,影响反应器的生产能力和 产品质量。
80%
停留时间分布曲线
通过实验测定,可直观反映反应 器内物料的停留时间分布情况。
转化率与选择性
转化率
表示原料在反应器内转化为产 品的程度,是衡量反应器性能 的重要指标。
选择性
表示在给定转化率下,生成目 标产物的能力,反映反应器的 选择性能。
THANK YOU
感谢聆听
缺点与挑战
能耗较高
连续搅拌过程需要消耗大量能量,导致CSTR反应器的能耗相对较 高。
设备复杂度高
CSTR反应器结构复杂,涉及搅拌、传热、传质等多个过程,设备 设计、制造和维护难度较大。
放大效应
在将实验室规模的CSTR反应器放大至工业生产规模时,可能会遇到 放大效应问题,影响反应器的性能和产物质量。
釜式反应器操作与控制—理想连续操作釜式反应器
理想连续操作釜式反应器的计算
理想连续操作釜式反应器的计算
理想连续操作釜式反应器的计算
通过[例2-1]和[例2-2]的反应结果可以看出:完成相 同的生产任务,连续操作釜式反应器的生产时间比间歇操 作釜式反应器的生产时间要长。主要原因是连续操作釜式 反应器内的化学反应是在出口处的低浓度下进行的。
反应时间不是判别反应器生产效率高低的唯一标准,还需综合考虑
同的搅拌和加料情况,以适应工艺上的不同要求。
理想连续操作釜式反应器
管式反应器
理想连续操作釜式反应器
投资大 职工工作量大
维护成本高 操作难度高
串联釜数一般不超过4
《化学反应器操作与控制》
多釜串联的计算
多釜串联的计算
多釜串联
理想连续操作釜式反应器
n-CSTR的基础设计式
理想连续操作釜式反应器
《化学反应器操作与控制》
理想连续操作釜式反应器的特点
理想连续操作釜式反应器的特点
理想连续操作釜式反应器操作现场
理想连续操作釜式反应器的特点
流体流动符合全混流理想流动模型 连续进料和出料; 过程参数与空间位置、时间无关; 容易自动控制,节省人力。
理想连续操作釜式反应器的特点
反应物浓度、转化率、反应速率处处相等
QkJc/与hT的函数关系式在Q-T坐标图 上为一直线。
▪2. 放热速率Qr和移热速率Qc
结论: 热稳定状态点一定是定态
点,而定态点不一定都具有热 稳定性。
▪ 3.热稳定条件
定常条件:Qr=QC
▪ 稳定条件
dQr dQc dT dT
注意::CSTR中进行吸热反应时 ,
没有热稳定性问题。
▪ 3.热稳定条件
《化学反应器操作与控制》
化学反应工程_华东理工大学中国大学mooc课后章节答案期末考试题库2023年

化学反应工程_华东理工大学中国大学mooc课后章节答案期末考试题库2023年1.对简单不可逆二级反应,根据要求的处理量、初浓度和转化率,所需的反应器体积最小。
参考答案:平推流2.工业反应过程优化的决策变量包括参考答案:操作方式_工艺条件_结构变量3.均相反应应该满足下述哪2个条件?参考答案:反应体系互溶_预混合过程很快4.对串联反应而言,存在一个最优反应温度使反应产物收率最大。
参考答案:错误5.化学反应工程的研究方法是经验放大方法参考答案:错误6.连续流动釜式反应器中物料浓度和温度处处相等,并且等于反应器进口物料的浓度和温度。
参考答案:错误7.理想间歇反应器中搅拌越激烈,混合越均匀,则反应速率越快。
参考答案:错误8.化学反应的前提是参与反应的所有物料达到分子尺度上的均匀,成为均一的气相或液相。
参考答案:错误9.产生返混的原因是参考答案:不均匀的速度分布_空间上的反向流动10.限制返混的措施包括参考答案:横向分割_纵向分割11.化学反应工程的研究对象是以化学实验室中进行的化学反应过程。
参考答案:错误12.化学反应工程优化的技术指标是参考答案:反应选择率_能耗_反应速率13.活化能E与反应的热效应相关,活化能大的反应其反应热也大。
参考答案:错误14.零级反应的重要特征是反应时间由残余浓度决定,与初始浓度关系不大。
参考答案:错误15.可逆放热反应的最优温度随转化率xA变大而增大。
参考答案:错误16.限制返混的措施是分割,主要是横向分割。
参考答案:正确17.理想管式反应器的径向具有严格均匀的速度分布,也就是在径向不存在浓度变化,所以反应速率随空间位置的变化将只限于轴向。
参考答案:正确18.对自催化反应A+P®P+S而言,必定存在最优反应时间使反应的转化率最大。
参考答案:错误19.小于1级的简单不可逆反应,反应转化率可以在有限时间里达到100%。
参考答案:正确20.空速1000(1/h)表示每小时能够处理的进口物料体积为反应器体积的1000倍。
CSTR先进控制系统
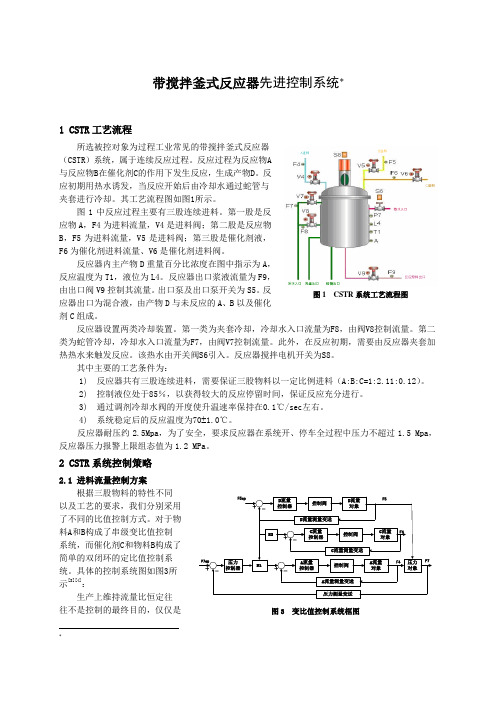
带搅拌釜式反应器先进控制系统*1 CSTR 工艺流程所选被控对象为过程工业常见的带搅拌釜式反应器(CSTR )系统,属于连续反应过程。
反应过程为反应物A 与反应物B 在催化剂C 的作用下发生反应,生成产物D 。
反应初期用热水诱发,当反应开始后由冷却水通过蛇管与夹套进行冷却。
其工艺流程图如图1所示。
图1中反应过程主要有三股连续进料。
第一股是反应物A ,F4为进料流量,V4是进料阀;第二股是反应物B ,F5为进料流量,V5是进料阀;第三股是催化剂液,F6为催化剂进料流量、V6是催化剂进料阀。
反应器内主产物D 重量百分比浓度在图中指示为A ,反应温度为T1,液位为L4。
反应器出口浆液流量为F9,由出口阀V9控制其流量。
出口泵及出口泵开关为S5。
反应器出口为混合液,由产物D 与未反应的A 、B 以及催化剂C 组成。
反应器设置两类冷却装置。
第一类为夹套冷却,冷却水入口流量为F8,由阀V8控制流量。
第二类为蛇管冷却,冷却水入口流量为F7,由阀V7控制流量。
此外,在反应初期,需要由反应器夹套加热热水来触发反应。
该热水由开关阀S6引入。
反应器搅拌电机开关为S8。
其中主要的工艺条件为:1) 反应器共有三股连续进料,需要保证三股物料以一定比例进料(A:B:C=1:2.11:0.12)。
2) 控制液位处于85%,以获得较大的反应停留时间,保证反应充分进行。
3) 通过调剂冷却水阀的开度使升温速率保持在0.1℃/sec左右。
4) 系统稳定后的反应温度为70±1.0℃。
反应器耐压约2.5Mpa ,为了安全,要求反应器在系统开、停车全过程中压力不超过1.5 Mpa ,反应器压力报警上限组态值为1.2 MPa 。
2 CSTR 系统控制策略2.1 进料流量控制方案根据三股物料的特性不同以及工艺的要求,我们分别采用了不同的比值控制方式。
对于物料A 和B 构成了串级变比值控制系统,而催化剂C 和物料B 构成了简单的双闭环的定比值控制系统。
连续釜式反应器

打漩现象
搅拌器两方面性能: 产生强大的液体循环流量; 产生强烈的剪切作用。 基本原则: 在消耗同等功率的条件下,低转速、大直径 的叶轮,可增大液体循环流量,同时减少液体受到的剪切 作用,有利于宏观混合。 反之,高转速、小直径的叶轮,结果与此恰 恰相反。
常用搅拌器的型式、结构和特点 化学工业中常用的搅拌装置是机械搅拌装置,包 括 搅拌器:包括旋转的轴和装在轴上的叶轮; 辅助部件和附件:包括密封装置、减速箱、搅拌电 机、支架、挡板和导流筒等。 搅拌器是实现搅拌操作的主要部件,其主要的组 成部分是叶轮,它随旋转轴运动将机械能施加给液体, 并促使液体运动。
通常可以采取τ1=τ2,这时整个反应系统最优。 即要
这时
釜式反应器的故障处理及维护要点
序 1 故障现象 壳体损坏 ( 腐蚀、 裂纹、透 孔) 超温超压 故障原因 1.受介质腐蚀(点蚀、晶间腐蚀) 2.热应力影响产生裂纹或碱脆 3.损变薄或均匀腐蚀 1.仪表失灵,控制不严格 2.误操作;原料配比不当;产生剧热反应 3.因传热或搅拌性能不佳,发生副反应 4.进气阀失灵,进气压力过大、压力高 处理方法 1.用耐蚀材料衬里的壳体需呕新修衬或局部补焊 2.焊接后要消除应力,产生裂纹要进行修补 3.超过设计最低的允许厚度需更换本体 1.检查、修复自控系统,严格执行操作规程 2.根据操作法,紧急放压,按规定定量。定时投料, 严防误操作 3.增加传热面积或清除结垢,改善传热效果;修复 搅拌器,提高搅拌效率 4.关总气阀,切断气源修理阀门 1.更换或修补搅拌轴,并在机床上加工,保证表面 粗糙度 2.调整油环位置,清洗油路 3.压紧填料,或更换填料 4.修补或更换 5.更换摩擦副或重新研磨 6.调整比压要合适,加强冷却系统,及时带走热量 7.密封圈选材、安装要合理,要有足够的压紧力 8.停车,重新找正,保证垂直度误差小于0.5mm 9.严格控制工艺指标,颗粒及结晶物不能进入摩擦 副 10.调整、检修使轴的窜量达到标准 11.改进安装工艺,或过盈量要适当,或粘接剂要好 用,粘接牢固
3.连续反应^
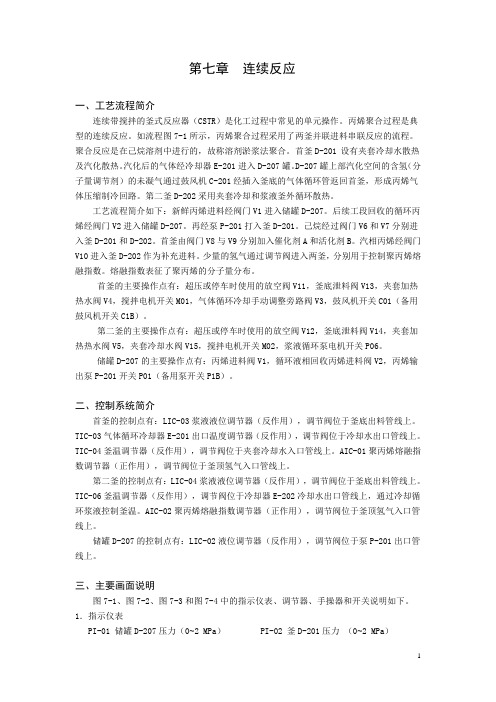
第七章连续反应一、工艺流程简介连续带搅拌的釜式反应器(CSTR)是化工过程中常见的单元操作。
丙烯聚合过程是典型的连续反应。
如流程图7-1所示,丙烯聚合过程采用了两釜并联进料串联反应的流程。
聚合反应是在己烷溶剂中进行的,故称溶剂淤浆法聚合。
首釜D-201 设有夹套冷却水散热及汽化散热。
汽化后的气体经冷却器E-201进入D-207罐。
D-207罐上部汽化空间的含氢(分子量调节剂)的未凝气通过鼓风机C-201经插入釜底的气体循环管返回首釜,形成丙烯气体压缩制冷回路。
第二釜D-202采用夹套冷却和浆液釜外循环散热。
工艺流程简介如下:新鲜丙烯进料经阀门V1进入储罐D-207。
后续工段回收的循环丙烯经阀门V2进入储罐D-207。
再经泵P-201打入釜D-201。
己烷经过阀门V6和V7分别进入釜D-201和D-202。
首釜由阀门V8与V9分别加入催化剂A和活化剂B。
汽相丙烯经阀门V10进入釜D-202作为补充进料。
少量的氢气通过调节阀进入两釜,分别用于控制聚丙烯熔融指数。
熔融指数表征了聚丙烯的分子量分布。
首釜的主要操作点有:超压或停车时使用的放空阀V11,釜底泄料阀V13,夹套加热热水阀V4,搅拌电机开关M01,气体循环冷却手动调整旁路阀V3,鼓风机开关C01(备用鼓风机开关C1B)。
第二釜的主要操作点有:超压或停车时使用的放空阀V12,釜底泄料阀V14,夹套加热热水阀V5,夹套冷却水阀V15,搅拌电机开关M02,浆液循环泵电机开关P06。
储罐D-207的主要操作点有:丙烯进料阀V1,循环液相回收丙烯进料阀V2,丙烯输出泵P-201开关P01(备用泵开关P1B)。
二、控制系统简介首釜的控制点有:LIC-03浆液液位调节器(反作用),调节阀位于釜底出料管线上。
TIC-03气体循环冷却器E-201出口温度调节器(反作用),调节阀位于冷却水出口管线上。
TIC-04釜温调节器(反作用),调节阀位于夹套冷却水入口管线上。
连续操作釜式反应器(CSTR)的计算

VR CA0 CA CA0 xAf
V0 (rA ) f (rA ) f
第六章 离婚制度
二、离婚制度的历史沿革
(一)外国离婚制度的历史沿革
1.禁止离婚主义 2.许可离婚主义
(1)专权离婚主义 (2)限制离婚主义 (3)自由离婚主义
பைடு நூலகம்
第一,有责离婚主义 第二,无责离婚主义
二、离婚制度的历史沿革
(二)我国离婚制度的历史沿革
1.我国古代的离婚制度
(1)七出 (2)和离 (3)义绝 (4)诉离
2.我国近代的离婚制度
(1)两愿离婚 (2)判决离婚
3.我国现代的离婚制度
第二节
协议离婚
一、协议离婚的概述
(一)协议离婚又称为登记离婚或自愿离婚,是指夫妻双 方在协商一致的基础上,按照行政程序解除婚姻关系的 离婚方式。
反应器内,物 料的浓度和温度处 处相等,且等于反 应器流出物料的浓 度和温度。
CA CA,in
time
CA, out
0
CA CA,O
t tresidence time
position
CA, out
0
t
x
一、单个连续操作釜式反应器的计算(1- CSTR)
基础设计式
取整个反应器为衡算对象
0
流入量 = 流出量 + 反应量 + 累积量
CA0 xA kCA0 (1 xA)
xA k(1 xA)
CA0 xA kCA02 (1 xA)2
xA kCA0 (1
xA ) 2
二、多个串联连续操作釜式反应器 (N-CSTR)
为什么要采用N-CSTR代替1-CSTR? 由于1-CSTR存在严重的返混,降低了反应
化学反应工程连续流动釜式反应器
补充知识点:空时与空速的概念:
空时:
Vr V0
反应体积 进料体积流量
(因次:时间)
表明 Vo , 处理能力
空速:
1 V0 FA0
Vr cA0Vr
因次 :时间-1
空速的意义:单位时间单位反应体积所处理的物料量。 空速越大,反应器的原料处理能力越大。
第九页,编辑于星期六:十八点 一分。
第十八页,编辑于星期六:十八点 一分。
2. 一级不可逆等容单一反应 对于一级不可逆反应,可以直接建立级数m和最终转
化率之间的关系,不必逐级计算。
第i级
VRi
V0 (CAi1 CAi ) rAi
式中 rAi kCAi
上式可化为
k i
(CAi1 CAi ) CAi
CAi 1
CAi1 1 k i
第十五页,编辑于星期六:十八点 一分。
在三釜串联操作时,前两釜都是在高于CAf的浓度下 进行,仅第三釜在CAf进行,反应速度比两釜串联时
又有所提高。可见,串联的釜数越多,反应物浓度提 高越多,反应速度越快,需要的反应时间或反应器体 积就越小。 将几个全混釜串联起来操作就构成了多釜串联反应器。
第十六页,编辑于星期六:十八点 一分。
设有4级串联全混流反应器,其浓度推动力如图所示。
ΔCA多=(CA1-CA*)1+(CA2-CA*)2+(CA3-CA*)3+(CA4-CA*)4 显然ΔCA平>ΔCA多>ΔCA全 当级数为∞,则ΔCA平=ΔCA多
CA0
CA0
CA1
CA2
CA1
CA3
CA4
CA2
CA3
CA4
CA*
第十三页,编辑于星期六:十八点 一分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
连续连续搅拌釜式反应器搅拌釜式反应器搅拌釜式反应器((CSTR )控制系统设计1. 前言连续搅拌釜式反应器(continuous stirred tank reactor ,简称为CSTR )是聚合化学反应中广泛使用的一种反应器,该对象是过程工业中典型的、高度非线性的化学反应系统。
在早期反应釜的自动控制中,将单元组合仪表组成位置式控制装置,但是化学反应过程一般都有很强的非线性和时滞性,采用这种简单控制很难达到理想的控制精度。
随着计算机技术和PLC 控制器的发展,越来越多的化学反应采用计算机控制系统,控制方法主要为数字PID 控制。
但PID 控制是一种基于对象有精确数学模型的线性过程,而CSTR 模型最主要的一个特征就是非线性,因此PID 控制在这一过程中的应用受到限制。
随着现代控制理论和智能控制的发展,更加先进有效的控制方法应用于CSTR 的控制,如广义预测控制,神经模糊逆模PID 复合控制,自抗扰控制,非线性最优控制,基于逆系统方法控制,基于补偿算子的模糊神经网络控制,CSTR 的非线性H ∞控制等。
但任何一种复杂的化工反应过程都不能用一种简单的控制方式达到理想的控制效果。
目前先进的反应釜智能控制技术就是将智能控制理论和传统的控制方法相结合,如钟国情、何应坚等于1998年对基于专家系统的CSTR 控制系统进行了研究[1],宫会丽、杨树勋等于2003年发表了关于PID 参数自适应控制的新方法[2],冯斌、须文波等于1999年阐述了利用遗传算法的寻优PID 参数的模型参考自适应控制方法等[3]。
但由于这些控制方法的算法比较复杂,在算法的工程实现、现场调试及通用型方面存在着局限性,因此研究一种相对简单实用的CSTR 控制方法,更易为工程技术人员所接受。
本文在对CSTR 过程及其数学模型进行详细分析的基础上,针对过程的滞后性,采用Smith 预估算法与PID 控制相结合的方法实现CSTR 过程的控制,该方法具有实用性强及控制方法简单等特点,基于西门子PCS7系统完成了CSTR 过程控制系统设计。
2.工艺过程及数学模型工艺过程及数学模型分析分析2.1 CSTR 工艺过程分析CSTR 在化工生产的核心设备中占有相当重要的地位,在染料、医药试剂、食品及合成材料工业中,CSTR 得到了广泛的应用。
在CSTR 中,反应原料以稳定的流速进入反应器,反应器的反应物料以同样稳定流速流出反应器。
由于强烈搅拌的作用,刚进入反应器的新鲜物料与已存留在反应器的物料在瞬间达到完全混合,使釜内物料的浓度和温度处处相等。
同样,在反应器出口处即将流出反应器的物料浓度也应该与釜内物料浓度一致,因此流出反应器的物料浓度与反应器内的的物料浓度相等。
连续搅拌釜式反应器中的反应速率即由釜内物料的温度和浓度决定。
2.2 CSTR 的数学模型分析CSTR 是一个存在严重非线性的动态系统,针对该系统的建模、状态估计和控制都存在着相当的难度。
一般常规的线性控制方法已不能满足要求,为了提高其性能,必须采用先进的控制技术。
本文针对某化工过程CSTR 系统,在符合实际情况的条件下假设:系统物料混合是完全的;流出物料的体积等于流入物料的体积;同时不失一般性,假定反应釜中所发生的是一级不可逆放热反应。
系统的结构如图1所示。
图1.CSTR 系统模型在这里,采用一阶不可逆反应(A B)非等温CSTR 系统作为研究对象(Morningred, 1999),其特性可由以下连续时间的非线性微分方程组来表示:()()00(())()ERT t q Ca Ca Ca t k Ca t e v−=−−&3()()()()0120(())()()(1)(())c k Eq t RT t c c q T T T t k Ca t e k q t eT T t v−−=−++−−& 表1.CSTR 参数表对象参数 物理意义 名义值 q过程流量 100L/min v反应器体积 100L0k反应时间常数 5710×/min/E R反应激活能 4110×K0T 馈入温度 350K 0c T冷却剂温度 350KH ∆ 反应热 5210−×cal/molp C ,pc C质量定压热容 1cal/g/Kρ,c ρ液体密度 3110×g/lH α热交换系数5710×cal/min/K式中,()Ca t 是产品的平衡浓度,()T t 为反应浓度,0Ca 是进料浓度(mol/L),q 为物料流量,0T ,0Tc 分别为物料浓度和冷却剂温度;同样,0K ,/E R ,v ,1k ,2k ,3k ,作为化学反应的系数在此时保持常数,其CSTR 的参数如表1所示。
CSTR 的工作过程为:两者化学物质在CSTR 中混合形成一种浓度为()Ca t 的化合物A ,其混合温度为()T t 。
此反应为放热反应,产生的热量会影响反应速度,因此必须引入冷却剂,其流量为()c q t ,带走热量,冷却温度,保证产品的浓度得以控制。
在这里,针对的是SISO 系统,控制目标是使产品的浓度Ca 在给定的范围内波动,操纵变量(即控制输入)为冷却剂流量c q ,状态变量为[Ca ,T ]。
基于以上分析,由化学动力学和热力学的知识可得到该系统较为详细的数学模型为:111220.112(1)exp[/(1)/19.186]dx x x x x dt =−+−×+ (1) 2212228.1216.070.112(1)exp[/(1)/19.186]27.12dx x x x x u dt=−+××−×++ (2) 2y x = (3)式中:状态变量1x 是与浓度有关的转化率,状态变量2x 是混合器内反应温度r T 的无因次化表示;控制变量u 对应夹套内冷却剂的温度,实际运行时反应器的进料流量恒定而使CSTR 系统成为温度控制系统。
3.CSTR 控制方案设计该连续反应系统主要包括5种控制:进料流量及比例控制、反应器液位控制、反应器温度及升温速率控制、反应器压力安全控制、反应器组份控制。
3.1 进料流量及比例控制本系统共有三组连续进料,且三组物料之间按一定比例混合反应。
同时为适应生产灵活性,在控制时将以变比值方式设计,开车时的默认值为标准值(A:B:C=1:2.11:0.12)。
为了消除进料流量时的扰动,可以采用数字滤波的方法,保证生产的平稳进行。
3.2 反应器液位控制从反应物料进入反应器开始至该反应物料离开反应器为止所历经的时间称为停留时间。
该时间与反应器中实际的物料容积和物料的体积流量有关。
一般来说停留时间长,进料流量小,反应的转化率高。
因此,对液位进行控制,可以增加停留时间,对反应的充分进行有积极的意义。
对于液位系统,采用PID 控制方法,对物料A 入口阀和物料D 出口阀的开度进行调节,从而保证液位控制的精度。
3.3 反应温度及升温速率控制考虑该CSTR 反应属于放热反应,反应温度的高低可以表征反应速度的快慢,即当反应速度加快时,放出的热量增加,导致系统温度升高;反之系统温度下降。
同时,在控制中应注意的是,放热反应属于非自衡的危险过程,当反应温度过高时,反应速度加快,使得反应放出的热量增加,如果热量无法及时释放,则反应温度进一步升高。
这种“正反馈”作用将导致反应器温度急剧上升,同时反应器压力飞升。
如果反应器内压力超过反应器所能耐受的极限,可能发生爆炸与火灾事故。
因此,从生产安全的角度考虑,温度是一个极其重要的控制因素。
温度控制往往是工业生产控制中较复杂的一种控制过程,其主要原因是时间常数较大,反应呈现较强的滞后性。
本系统主要靠蛇管和夹套中的冷却水进行冷却,然而,随着阀门开度的改变,冷却水流量的变化较快,并且当冷却水压力下降时(这种干扰在现场时有发生),即使阀位不变,冷却水流量也会下降,导致冷却水带走的热量减少,反应器中物料温度上升。
针对本CSTR 系统温度时间常数大,变化滞后这一特性,本文采用Smith 预估器法对其进行控制[4]。
在图2所示的单回路系统中,()D s 表示调节器的传递函数,用于校正()p G s 部分;()s p G s e τ−表示被控对象的传递函数,()p G s 为被控对象中不包含纯滞后部分的传递函数,s e τ−为被控对象纯滞后部分的传递函数,τ为纯滞后时间。
图2.带纯滞后环节的控制系统Smith 预估控制原理是:与()D s 并接一补偿环节,用来补偿被控对象中的纯滞后部分,这个补偿环节称为Smith 预估补偿器,其传递函数为()(1)sp G s e τ−−。
补偿后的系统框图如图3所示。
图3.Smith 预估补偿回路图由Smith 预估器和调节器()D s 组成的补偿回路称为纯滞后补偿器,其传递函数为:()()1()()(1)s s p D s D s D s G s e τ−=+−经补偿后的系统闭环传递函数为:()()()()()1()()1()()s p p s sp p D s G s e D s G s s e D s G s e D s G s τττ−−−Φ==++上式说明,经补偿后,消除了纯滞后部分对控制系统的影响。
纯滞后补偿的数字控制器由数字PID 控制器(由()D s 离散化得到)和Smith 预估器两部分组成。
系统中的滞后环节使信号延迟,为此,在内存中专门设定N 个单元作为存放信号()m k 的历史数据,存储单元的个数由下式决定:/N T τ=式中:T 为采样周期。
每采样一次,就把()m k 记入0单元,同时把0单元原来存放的数据移入1单元,1单 元原来存放的数据移入2单元,依次类推。
由单元N 输出的信号就是滞后N 个采样周期的()m k N −信号。
本系统的温度控制采用PID 算法,计算步骤如下: 1) 计算反馈回路的偏差1()e k1()()()e k r k y k =−2) 计算纯滞后补偿器的输出()r y k()()(1)()s r p Y s G s e U s τ−=− 相应的差分方程为Smith 预估控制算式:()(1)[(1)(1)]r r y k y k u k u k N αβ=−+−−−−3) 计算偏差2()e k 4) 计算控制器的输出()u R21()()()r e k e k y k =−()(1)()u k u k u k =−+∆222222(1)[()(1)]()(()2(1)(2))p i d u k K e k e k K e k K e k e k e k =−+−−++−−+− 式中:p K 为PID 控制的比例系数,/i p i K K T T =为积分系数,/d p d K K T T =为微分系数。